
Learning Optimal Behavior in Environments with
Non-stationary Observations
Ilio Boone and Gavin Rens
a
DTAI group, KU Leuven, Belgium
Keywords:
Markov Decision Process, Non-Markovian Reward Models, Mealy Reward Model (MRM), Learning MRMs,
Non-stationary.
Abstract:
In sequential decision-theoretic systems, the dynamics might be Markovian (behavior in the next step is in-
dependent of the past, given the present), or non-Markovian (behavior in the next step depends on the past).
One approach to represent non-Markovian behaviour has been to employ deterministic finite automata (DFA)
with inputs and outputs (e.g. Mealy machines). Moreover, some researchers have proposed frameworks for
learning DFA-based models. There are at least two reasons for a system to be non-Markovian: (i) rewards
are gained from temporally-dependent tasks, (ii) observations are non-stationary. Rens et al. (2021) tackle
learning the applicable DFA for the first case with their ARM algorithm. ARM cannot deal with the second
case. Toro Icarte et al. (2019) tackle the problem for the second case with their LRM algorithm. In this
paper, we extend ARM to deal with the second case too. The advantage of ARM for learning and acting in
non-Markovian systems is that it is based on well-understood formal methods with many available tools.
1 INTRODUCTION
The field of sequential decision-making has been ex-
tensively researched in academic literature, from de-
veloping optimal solution algorithms for the standard
settings (Ross, 2014; White III and White, 1989), to
learning how to apply these methods in a more com-
plex environment (Bacchus et al., 1996; Singh et al.,
1994). The traditional setting is the Markov Decision
Process (MDP), where the environment is Markovian
and all dynamics depend only on the current state.
This assumption is often insufficient to present real-
life problems, as this property may be violated.
Two reasons that might cause an environment (and
its MDP model) to be non-Markovian are (i) temporal
dependencies in the tasks to be solved and (ii) obser-
vations being non-stationary.
In the case where there are temporal dependen-
cies in the tasks, we associate decision processes
with non-Markovian reward decision processes (NM-
RDPs). Here, the reward received depends on the ac-
tions performed in the past. The reward function now
has a temporal dependence. In order for the agent to
know which action to perform to receive a higher re-
ward, it thus has to keep track of its past actions and
states it visited.
a
https://orcid.org/0000-0003-2950-9962
The case where observations are non-stationary
cannot occur in (fully observable) MDPs (nor in fully
observable NMRDPs). However, this case is possible
in partially observable MDPs (POMDPs), where an
agent is unable to clearly distinguish states from each
other and only receives an observation from the envi-
ronment. In order for the agent to know which action
to perform to receive a higher reward, it thus has to
keep track of its past observations.
The ARM framework, as developed by Rens et al.
(2021), has been shown to converge to an optimal so-
lution for NMRDPs. In this paper, we re-evaluate the
ARM algorithm for processes with non-stationarity
and partial observability. We investigate to what
extent Deterministic Finite Automata (DFA) can be
used to learn the reward structure of POMDPs with
non-stationary observations. The limitations of the
ARM framework are investigated, using a version of
the Cookie Domain, introduced by Toro Icarte et al.
(2019), and we show how the ARM framework can
be extended appropriately.
In the next three sections, we review the related
work, we present the illustrative problem (the Cookie
Domain), and some basic formal concepts are re-
viewed. Section 5 describes the ARM algorithm and
Section 6 discusses how we extend ARM to overcome
its shortcoming w.r.t. the Cookie Domain (and simi-
Boone, I. and Rens, G.
Learning Optimal Behavior in Environments with Non-stationary Observations.
DOI: 10.5220/0010898200003116
In Proceedings of the 14th International Conference on Agents and Artificial Intelligence (ICAART 2022) - Volume 3, pages 729-736
ISBN: 978-989-758-547-0; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
729

Figure 1: The Cookie domain with a button in the yellow
room and and agent (A) in the blue room.
lar domains), and we proved theoretical results. The
paper ends with a discussion and concluding remarks.
2 RELATED WORK
As mentioned, this paper is concerned with learning
non-Markovian reward functions with non-stationary
observations, for which the ARM framework is used
(Rens et al., 2021). The learning is based on An-
gluin’s L* algorithm (Angluin, 1987), which asks a
finite number of queries about the reward behaviour
and stores the associated rewards to these queries. A
DFA, in particular a Mealy Reward Machine (MRM)
is then constructed. This MRM provides the memory
necessary to maximize its rewards.
The use of traditional automata to represent the
complex structure of reward functions in MDPs has
been investigated by others as well. Gaon and Braf-
man (2020) and Xu et al. (2021) also create DFAs
to represent the reward structure of complex MDPs,
relying on the L* algorithm. However, contrary to
the implementation in the ARM framework, a tag for
each trace/query is provided. This tag reflects whether
the corresponding trace can be recreated in the envi-
ronment within a certain number of attempts. The au-
thors conclude that the L* algorithm works well in
short, simple reward models, but has difficulties in
more complex environments.
Toro Icarte et al. (2019) employ a DFA in a non-
stationary environment to represent the reward struc-
ture. The authors classify the problem in their work as
a POMDP, as there are elements of the domain that are
unobservable at certain moments. One of the prob-
lems that is investigated by Toro Icarte et al. (2019),
is referred to as the ‘Cookie Domain’, which also has
a non-Markovian reward structure. In Section 4 the
problem is formally defined and the non-stationarity
is illustrated.
In non-Markovian environments, memory is often
required to make more accurate predictions regarding
the (probability of the) current state the agent is in or
to know what reward will be given to the agent. It
is in this regard that POMDPs, NMRDPs and non-
stationary MDPs seem to share some properties, and
some authors have alluded to their similarity, for in-
stance, classifying POMDPs as a subclass of NM-
RDPs (Singh et al., 1994).
3 FORMAL PRELIMINARIES
A Markov decision process is traditionally defined as
a tuple hS, A, T, R, s
0
i, where S represents a finite set
of states and A is a finite set of actions. T : S × A 7→
[0, 1] defines the state transition function such that
T (s, a, s
0
) is the probability that action a causes a sys-
tem to transition from s to s
0
. R : A × S 7→ R is the
reward function such that R(a, s) is the immediate re-
ward for performing a in state s. s
0
is the initial
state of the system. Bacchus et al. (1996) define an
NMRDP as a tuple hS, A, T, R, s
0
i, where all elements
have the same meaning as in the MDP, except for
the reward function. The reward function now takes
as its domain a trace of states and actions, or a his-
tory, instead of individual states. Let H
f o
be the set
of all fully observed histories. A history α
h
∈ H
f o
is represented in the form s
1
a
1
, s
2
a
2
, ..., a
k−1
s
k
. A
non-Markovian reward function is nmR : α
h
7→ R. It
is sometimes useful to separate an NMRDP into a
non-rewarding MDP (nrMDP) hS, A, T, s
0
i and a non-
Markovian reward function nmR.
A POMDP is a generalization of the tradi-
tional MDP and can be represented as a tuple
hS, A, T, R, Z, ω, b
0
i (Kaelbling et al., 1998). S, A, T ,
and R are defined as in the traditional MDP. Z is a fi-
nite set of observations and ω : Z × A × S 7→ [0, 1] is
the probability distribution over possible observations
such that ω(z, a, s) is the probability that observation
z is perceived in state s, reached by performing action
a. The initial probability distribution over S (i.e. belief
state) is b
0
. For POMDPs, we introduce partially ob-
servable histories. A history α
h
∈ H
po
is represented
in the form a
1
, z
1
, a
2
, z
2
, ..., a
k
, z
k
.
The notion of a belief state is often employed,
that is, a probability distribution over all states. It is
computed by k applications of belief update function
BU : B × A × Z 7→ B, where B is the space of belief
states (Kaelbling et al., 1998).
Definition 3.1. Given belief state b
t
and his-
tory α
h
= a
1
, z
1
, a
2
, z
2
, ..., a
k
, z
k
, the history-based
belief update function is BU
H
(b
t
, α
h
) = b
t+k
.
=
BU(BU . . . BU(b
t
, a
1
, z
1
), . . .)a
k−1
, z
k−1
), a
k
, z
k
). The
expected reward of performing action a in belief state
b
α
h
is
∑
s∈S
R(a, s)b
α
h
(s).
A reward machine (defined below) uses a la-
belling function λ to map action-state pairs onto ob-
servations about the environment. λ : A × S 7→ Z ∪
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
730

{null}, where λ(a, s) = z means that z is observed in
state s, reached via action a.
1
Definition 3.2 ((Rens et al., 2021)). Given a set of
states S, a set of actions A and a labeling function λ, a
Mealy Reward Machine is a tuple hU, u
0
, Z, δ
u
, δ
r
, ci,
where U is a finite set of MRM nodes, u
0
∈ U is
the start node, Z ] {null} is a set of observations.
δ
u
: U × Z 7→ U is the transition function, such that
δ
u
(u
i
, λ(a, s)) = u
j
for a ∈ A and s ∈ S, specifically,
δ
u
(u
i
, null) = u
i
. δ
r
: U ×Z 7→ R is the reward-output
function, such that δ
r
(u
i
, λ(a, s)) = r
0
for r
0
∈ R, a ∈ A
and s ∈ S, specifically, δ
r
(u
i
, null) = c. c is the default
reward for the non-significant observation null.
In order to create a process with Markovian be-
havior from an NMRDP with an MRM-based reward
model, one can take the synchronized product of the
NMRDP and the MRM. The product incorporates
sufficient information regarding the environment in
order to act optimally.
Definition 3.3 ((Rens et al., 2021)). Given an nr-
MDP M = hS, A, T, s
0
i, a labeling function λ : A ×
S 7→ Z ] {null} and an MRM R = hU, u
0
, Z, δ
u
, δ
r
i,
the synchronized product of M and R under λ
is defined as an (immediate reward) MDP P =
M ⊗
λ
R = hS
⊗
, A
⊗
, T
⊗
, R
⊗
, s
⊗
0
i, where S
⊗
= S ×
U, A
⊗
= A. T
⊗
((s, u), a, (s
0
, u
0
)) = T (s, a, s
0
) i f
u
0
= δ
u
(u, λ(a, s
0
)) and 0 otherwise. R
⊗
(a, (s, u)) =
δ
r
(u, λ(a, s)), s
⊗
0
= (s
0
, u
0
).
4 COOKIE DOMAIN
In the following sections, we investigate how to use
an MRM to represent reward structures and how the
ARM framework can learn this MRM. This is done
with a particular problem in mind, namely the Cookie
domain inspired by Toro Icarte et al. (2019). The
Cookie domain is first presented in a fully observable
and stationary environment in order to provide a full
understanding of the dynamics. Then the Cookie do-
main with partial and non-stationary observations is
described.
4.1 Fully Observable Cookie Domain
In its simplest form, the Cookie domain is represented
as a world with three distinct rooms, which are blue,
red and yellow (Fig. 1). An agent acts in the envi-
ronment, where it can go to each of the three rooms.
It can press a button in the yellow room, after which
1
Observation null is added to denote non-significant
states. The agent is able to distinguish those from signif-
icant observations, but this is not strictly necessary.
Figure 2: Transition function for fully observable Cookie
domain.
a cookie will spawn in either the red or blue room,
with equal probability. The agent has to go to the
room where the cookie is located and when it eats the
cookie, it will receive a reward. The non-stationarity
in this problem is related to the need to press the but-
ton before a cookie spawns.
The agent starts in the blue room, without a cookie
in the environment. Nine states can be distinguished,
given that there can exist at most one cookie at any
moment. The set of actions that the agent can per-
form consists of goB, goR, goY (Go to the Blue, Red
or Yellow Room), PressButton(PB) (Try to press the
button) and Eat (Try to eat the cookie). The states,
actions and transitions of the domain are presented in
Figure 2, where the color of the node corresponds to
the room that the agent is in. BC and RC denote that
a cookie is present is either the Blue or the Red room.
The actions that result in the agent staying in the same
state with probability one are not shown. The proba-
bility of all transitions between two different states is
always equal to one, except for when the button in the
yellow room is pressed, for which the probabilities is
0,5.
2
A reward is received when the agent performs
the Eat action in the same room where a cookie is
present. All other actions give no reward. This re-
ward function is Markovian and the Cookie domain is
defined as a traditional MDP. Traditional solving tech-
niques can be used to derive an optimal policy for this
problem (Bellman, 1957; Kolobov, 2012; Bertsekas,
2012).
4.2 Cookie Domain with Uncertainty
The Cookie domain can be made more complex, by
withholding information about the environment from
the agent. Suppose that the agent only knows what
2
Transitions are allowed to be stochastic, but for clarity
of illustration, we assume them to be deterministic (except
for the button pressing action).
Learning Optimal Behavior in Environments with Non-stationary Observations
731
room it is in. It has no information regarding the lo-
cation of the cookie and has no memory of his actions
in the past. The state space is now represented by just
three distinct states: B (Blue Room), R (Red Room)
and Y (Yellow Room).
0
2
1
3
Otherwise | 0
ButtonPressed | 0
Otherwise | 0
CookieInRed; EmptyBlue | 0
CookieInBlue; EmptyRed | 0
ButtonPressed | 0
ButtonPressed | 0
EmptyBlue | 1 EmptyRed | 1
Otherwise | 0
Otherwise | 0
CookieInRed | 0CookieInBlue | 0
CookieInBlue | 0
CookieInRed | 0
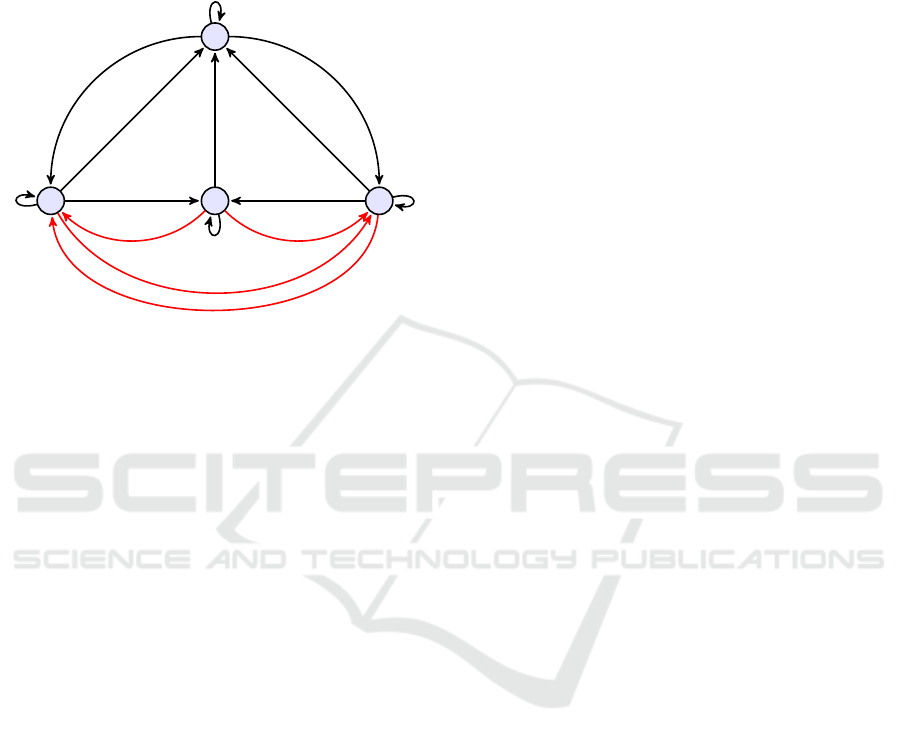
Figure 3: MRM learned in the Extended ARM Framework.
The set of actions remains the same as in the orig-
inal problem, with an extra action Look, which allows
the agent to see whether a cookie is present in the cur-
rent room. The transitions in this problem remain as
before and the agent stays in the same state when per-
forming the Look action.
By withholding information about the cookie in
the states, it becomes impossible to define a Marko-
vian reward function, as it now has a temporal de-
pendence, a non-Markovian behavior. Furthermore,
the agent is uncertain about the location of the cookie
once it has spawned and has to find out where it is
through observations, which are non-stationary due to
the dependence on when the button is pressed.
Toro Icarte et al. (2019) define a ’perfect MRM’
as the smallest DFA sufficient to represent the reward
structure of a problem. The ’perfect MRM’ for our
implementation of the Cookie domain is given in Fig-
ure 3 (ignore the transitions in red; they are for a later
discussion).
In order to formally analyze this kind of environ-
ment, we define the non-stationary and deterministic
observation MDP below. It relies critically on the no-
tion of a non-stationary labeling function:
Definition 4.1. A non-Markovian, deterministic la-
beling function λ : A × H 7→ Z ]{null} is a mapping
from an action-history pair to an observation. A non-
stationary labeling function λ
ns
: A × S 7→ 2
Z]{null}
is
a mapping from an action-state pair to one observa-
tion in one of the sets in 2
Z]{null}
. Furthermore, for
any history α
h
∈ H, λ(a, α
h
) ∈ λ
ns
(a, last(α
h
)), where
last(s
1
a
1
, s
2
a
2
, ..., a
k−1
s
k
) = s
k
.
Definition 4.2. A non-stationary and determinis-
tic observation MDP (NS-DOMDP) is a tuple P =
hS, A, T, R, Z, λ
ns
, b
0
i, where all elements of the tuple
except for λ
ns
are as usual for a (regular) POMDP.
Because of the partial observability
in the uncertain Cookie domain, the la-
belling function becomes non-stationary:
λ
ns
(Look, B) ∈ {EmptyBlue, CookieInBlue},
λ
ns
(Look, R) ∈ {EmptyRed, CookieInRed},
λ
ns
(Eat, B) = EmptyBlue, λ
ns
(Eat, R) = EmptyRed,
λ
ns
(PressButton, Y ) = ButtonPressed, λ
ns
(a, s) =
null otherwise.
The synchronized product (cf. Sect. 3) can then
be computed, using the MRM and the state space. If
the ARM algorithm is able to learn this MRM, then
the synchronized product and a corresponding opti-
mal policy can be computed for the Cookie domain
(cf. Sect. 6.2). In the next section, it is discussed
where the ARM has difficulties with the dynamic and
uncertainty aspects and how it can be extended in or-
der to deal with them.
5 THE ARM ALGORITHM
The ARM framework for learning in NMRDPs, as de-
veloped by Rens et al. (2021), consists of a learning
and an exploitation step. The learning step uses the
L* algorithm Angluin (1987), in order to build an Ob-
servation Table (OT) from a finite set of Membership
Queries (MQ), from which an MRM is built. In what
follows, the fundamentals of the ARM framework are
explained, with focus on how it answers MQs. Two
procedures of the ARM algorithm are discussed: (i)
generating MQs and (ii) collecting their rewards. We
refer to Rens et al. (2021) for details.
Generating Membership Queries. This procedure
generates observation traces for the OT, which have
not been queried yet and are required to make the OT
complete. To achieve this, it requires an input alpha-
bet I , which consists of a finite set of letters (Angluin,
1987). In the context of NMRDPs, these letters corre-
spond to observations in the environment, which are
the output of a labelling function λ. New observa-
tion traces get generated, with different orderings and
lengths, until the OT is complete.
Collecting Reward Traces. As transitions in
MDPs are stochastic, there is no sequence of actions
that guarantees the occurrence of a particular history
α
h
. MQs correspond to observation traces α
z
, which
can be extracted from a history α
h
using a labelling
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
732

function, answering MQ’s essentially comes down to
a planning problem. The procedure is the implemen-
tation of this planning problem in the ARM algorithm,
which forces a particular α
z
to occur. The procedure
derives a policy π(MIN) for which the expected num-
ber of steps to reach the sequence of observations is
minimized.
3
The output of this procedure is a de-
terministic stationary policy, stored in a scheduler,
which provides an action to perform in each state of
the environment, dependent on the observation that is
being queried. When a new sequence of observations
is queried, the procedure creates a temporary MDP.
This temporary MDP is created by using the states of
the problem and iteratively going over all actions that
can be performed in each of the states and investigat-
ing the corresponding observations. If a state-action
pair leads to the wrong observation, this state is not
added to the temporary MDP. States in the temporary
MDP consist of the original state plus an index. This
index starts as 0 and reflects the number of observa-
tions of α
Z
that have been made, in the correct order.
The created scheduler provides actions to reach a state
with an index equal to the length of α
z
, meaning the
trace was succesfully recreated.
6 EXTENDING THE ARM
ALGORITHM
In this section, the difficulties of the ARM algorithm
with respect to non-stationary observations / partial
observability are explord. The ARM algorithm is ex-
tended in some regards in order to be able to deal with
these complexities. The challenge for the ARM algo-
rithm and the labeling function we define is to deal
with MQs in a principled way. The pseudo-code for
the learning phase of the extended ARM algorithm
is shown in Algorithm 1; it is only fully defined by
the time M
⊗
(P , R ) is defined in Section 6.2. Once
the MRM is built, the exploitation phase remains as
in the original framework. Finally, the advantage of
using the extended ARM algorithm for environments
similar to the Cookie domain is discussed, including
some theoretical results.
We confirmed experimentally that the ‘perfect’
MRM is learned in the Cookie domain by the ex-
tended ARM framework, whereas the original frame-
work was unable to learn and exploit the Cookie do-
main.
3
There is also a MAX mode which we do not consider
in this work.
Algorithm 1: Extended ARM learning.
Initialize observation table OT
if OT is not complete then
α
z
← getMQ(OT)
α
0
z
← makeFeasible(α
z
)
while µ = f alse do
s ← getExperience(α
0
z
, s
0
)
if Last observation in α
z
is found then
µ = true
end if
end while
α
r
←resolveMQ(s, α
0
z
)
addToOT(α
0
z
, α
r
)
else
H ← buildRewardMachine(OT )
M ← M
⊗
(P , H ) where P = hS, A, T, R, Z, λ
ns
, b
0
i
Exploitation phase using M ...
end if
6.1 Extensions
6.1.1 Extension 1
As discussed in the previous section, the learning of
MRMs in the ARM framework comes down to an-
swering a finite number of MQs. MQs are answered
in the ARM algorithm by creating a scheduler, which
is used to recreate α
z
in the environment and stor-
ing the received reward. With non-stationary obser-
vations, it may be impossible to find a correct sched-
uler. In the Cookie domain, for example, a cookie can
only be observed after pressing the button. If α
z
starts
with the observation CookieInRed, it is impossible to
recreate this α
z
. A ButtonPressed observation has to
occur first.
To allow for the learning of the MRM in environ-
ments with non-stationary observations, some addi-
tions are made to the original ARM L* algorithm. In
algorithm 1, the getMQ() procedure corresponds to
the generation of MQs. MQs get generated by com-
bining all of the observations into observations traces,
with different orderings and lengths, if they are not
already present in the OT. In order to deal with non-
stationarity, each observation trace α
z
is now checked
for feasibility and if necessary, observations are in-
serted in α
z
. In general, this strategy requires domain
knowledge to identify infeasible MQs and knowing
which observations, when inserted, would make the
MQ feasible and where they have to be inserted. Al-
though it was not investigated for this paper, it should
be possible to implement a procedure that learns (with
certain probability) how to make infeasible MQs fea-
sible, while answering MQs simultaneously.
Hence, a new function makeFeasible() was de-
fined specifically for the Cookie domain, which takes
as input an observation trace α
z
and returns trace α
0
z
.
Learning Optimal Behavior in Environments with Non-stationary Observations
733

Note that α
0
z
is not always different from α
z
, only
when α
z
is not feasible/realistic. However, due to this
extension, special attention is needed for interpret-
ing the constructed MRM. The makeFeasible() pro-
cedures ensures that all MQs can be answered, but it
does not change the assumption the each observation
can be made at any moment. Consequently, the con-
structed MRM still creates a transition for each ob-
servation from every node. In this manner, there are
some ’impossible’ transitions present in the MRM.
This affects the interpretability of the created MRM,
as it might not be clear which transitions are impossi-
ble. The presence of these transitions, however, does
not affect the derivation of an optimal policy from the
synchronized product: Transitions made in the syn-
chronized product are based on actual observations
made in the environment and thus they will never oc-
cur when playing an episode. For the Cookie domain,
these ’impossible’ transitions are displayed in red in
Figure 3.
6.1.2 Extension 2
In the Observation Table (OT), the reward of each MQ
is stored, as received during the recreation of the ob-
servation traces α
0
z
. Due to the non-stationarity of ob-
servations in the Cookie domain, it becomes more dif-
ficult to recreate α
0
z
. If the observation CookieInRed
is being searched for, but the cookie spawns in the
blue room, the agent will never be able to make the
CookieInRed observation.
As discussed earlier, a temporary MDP is con-
structed, which is used to create a scheduler that sug-
gests how to find the observations in α
0
z
. In algo-
rithm 1, this is done in the procedure getExperience(),
which returns a scheduler s, used to find the reward
associated with the MQ in procedure resolveMQ().
Even when the necessary observations were not found
in the temporary MDP, a scheduler is output. When
this happens, procedure resolveMQ enters an endless
loop, as the scheduler always provides some action,
but the correct observation cannot be reached.
Again, the ARM algorithm is extended here such
that it will keep creating temporary MDPs until it
succeeds in finding all the observations of α
0
z
in the
right order, whereas it only used one temporary MDP
before. An auxiliary boolean variable µ is created,
which is true when every observation in α
0
z
was found
during the creation the temporary MDP and false oth-
erwise. The initial value of µ is false and every time
a temporary MDP has been fully created and µ is still
false, a new temporary MDP is constructed. The al-
gorithm succeeds in finite time, as each observation
trace that is added to the OT is feasible, due to the
additions made in the previous procedure. Using the
correct scheduler, resolveMQ finds the reward associ-
ated with the MQ, and addToOT() stores reward and
MQ in the OT afterwards, as in algorithm 1.
6.2 Theoretical Considerations
Whether the system is modeled as a NMRDP or
a POMDP with a non-stationary and determminis-
tic observation function (NS-DOMDP), if the sys-
tem’s behavior is fully described with the addition of
a MRM, then the model can be transformed into a
(regular) MDP by taking the synchronized product of
the non-rewarding MDP (nrMDP), respectively, NS-
DOMDP and the MRM. An optimal policy can then
be computed for the resulting MDP. The synchronized
product of a nrMDP and a MRM was defined by Rens
et al. (2021) and in Section 3. Now we show how to
construct a (regular) MDP from a NS-DOMDP and
an MRM. First, we construct a (regular) POMDP:
Definition 6.1. Given a NS-DOMDP
P = hS, A, T, R, Z, λ
ns
, b
0
i and an MRM
R = hU, u
0
, Z, δ
u
, δ
r
i, the synchronized product of P
and R is defined as an (immediate reward) POMDP
P
⊗
= P ⊗ R = hS
⊗
, A
⊗
, T
⊗
, R
⊗
, Z
⊗
, ω
⊗
, b
⊗
0
i, where
S
⊗
= S×U, A
⊗
= A. T
⊗
((s, u), a, (s
0
, u
0
)) = T (s, a, s
0
)
i f u
0
= δ
u
(u, λ
ns
(a, s
0
)) and 0 otherwise.
R
⊗
(a, (s, u)) = δ
r
(u, λ
ns
(a, s)) for all α
h
∈ H
po
that lead to u from u
0
, δ
r
(u, λ
ns
(a, s)) =
∑
s
0
∈S
R(a, s
0
)b
α
h
(s
0
), where b
α
h
= BU
H
(b
0
, α
h
).
Z
⊗
= Z, ω
⊗
(z, a, (s, u)) = 1 i f z = λ
ns
(a, s) and 0
otherwise. b
⊗
0
= (b
0
, u
0
)
Note that the observation function ω
⊗
is deterministic
and Markovian. This means that P
⊗
can be viewed as
a (regular) MDP hS
⊗
, A
⊗
, T
0⊗
, R
⊗
, s
⊗
0
i, if we assume
b
0
= {(s
⊗
0
, 1)} and where T
0⊗
((s, u), a, (s
0
, u
0
)) =
T (s, a, s
0
)ω
⊗
(λ
ns
(a, s
0
), a, (s
0
, u
0
)) if u
0
=
δ
u
(u, λ
ns
(a, s
0
)), and 0 otherwise. We denote
the MDP constructed from NS-DOMDP P and MRM
R as M
⊗
(P , R ).
We adapt the definition of a “perfect reward ma-
chine” from Toro Icarte et al. (2019) for our defini-
tions of an MRM and labeling function:
Definition 6.2. A Mealy reward machine R =
hU, u
0
, Z, δ
u
, δ
r
, ci is considered perfect for a NS-
DOMDP P = hS, A, T, R, Z, λ
ns
, b
0
i if and only if
for every trace s
0
, a
0
, ..., s
t
, a
t
generated by any
policy over P , the following holds: P(s
t+1
, r
t
|
s
0
, a
0
, . . . , s
t
, a
t
) = P(s
t+1
, r
t
|s
t
, x
t
, a
t
) where x
0
= u
0
and x
t
= δ
u
(x
t−1
, λ
ns
(a
t−1
, s
t−1
)).
Recall that λ
ns
is deterministic, and note that its
non-stationarity is ‘resolved’, given the trace (history)
s
0
, a
0
, ..., s
t
, a
t
(cf. Def. 4.1).
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
734

It is known that a POMDP can be viewed as a
‘belief-MDP’ if states represent beliefs (i.e. proba-
bility distributions over states), and methods exist for
computing optimal policies for POMDPs (Cassandra
et al., 1994; Kaelbling et al., 1998). The following
theorem (adapted from Toro Icarte et al. (2019) for
this work) follows from Definition 6.2.
Theorem 6.1. Given any NS-DOMDP
P = hS, A, T, R, Z, λ
ns
, b
0
i with a finite reachable
belief space, there will always exists at least one
perfect MRM for P with respect to λ
ns
.
Proof sketch. By defining ω(z, a, s) = 1 if z = λ
ns
(a, s)
and 0 otherwise, P can be viewed as a (regular)
POMDP P
0
= hS, A, T, R, Z, ω, b
0
i. If the belief space
B of P reachable from b
0
is finite, we can construct
an MRM that keeps track of the current belief state
using one MRM state per belief state and emulating
their progression using δ
u
and one propositional sym-
bol for every action-observation pair. Thus, the cur-
rent belief state b
t
can be inferred from the last ob-
servation, last action, and the current MRM state. As
such, the equality from Definition 6.2 holds.
Another theorem (adapted from Toro Icarte et al.
(2019) for this work) follows from Definition 6.2.
Theorem 6.2. Let R be a perfect MRM for a NS-
DOMDP P = hS, A, T, R, Z, λ
ns
, b
0
i. Then any optimal
policy for R w.r.t. the environmental reward is also
optimal for P .
Proof sketch. Let M = M
⊗
(P , R ) =
hS
⊗
, A
⊗
, T
0⊗
, R
⊗
, s
⊗
0
i be the MDP constructed
from P and R as described above. An optimal
policy for R is a function π : S × U 7→ A such
that if π(s, u) = a, then z = λ
ns
(a, s) is the optimal
observation at u. R
⊗
is based on R , and S
⊗
= S ×U.
Therefore, π(s, u) = π(s
⊗
) for all s
⊗
= (s, u), and π
is optimal for M. Since T
0⊗
is defined on T and δ
u
of
R , π must be optimal for P .
For the extended ARM framework, the guarantees
of the original framework still hold. This means that
the algorithm is guaranteed to either find the optimal
value for a synchronized product or find a counter-
example to the hypothesized MRM. The additions to
the exploitation phase ensure that counter-examples
are only found if the underlying MRM and the hy-
pothesized MRM are not equivalent.
The main result of Rens et al. (2021) transfers to
the extended ARM framework:
Theorem 6.3. Let V (π
∗
H
) be the value of the optimal
policy under the current/hypothesized MRM H , let P
be a NS-DOMDP and let R be the perfect MRM for
the environment under consideration. Given an ex-
pert value V
expert
, which is an underestimation of the
optimal value V (π
∗
R
) of M
⊗
(P , R ), the algorithm will
learn H such that V (π
∗
H
) ≥ V
expert
with a probability
of one in finite time.
The proof of Theorem 6.3 follows the same rea-
soning as given by Rens et al. (2021).
7 DISCUSSION AND
CONCLUSION
Although the ARM framework could previously learn
(and exploit) Mealy reward machines (MRMs) for
tasks with temporal dependencies, the framework
could not learn MRMs where observations are par-
tially observable and non-stationary. In this paper, we
showed how to extend ARM to deal with the latter.
We used the Cookie domain of Toro Icarte et al.
(2019) to illustrate the issues arising from partially
observable and non-stationary observations. We con-
firmed experimentally that the perfect MRM for the
Cookie domain is learnt with the extended ARM
framework, whereas previously, it could not be
learned.
The extended framework offers a way to derive
optimal policies using model-checking techniques.
Currently, no other works in the literature has devel-
oped techniques to do so in dynamic and partially ob-
servable environment. Toro Icarte et al. (2019) do
not offer a concise way to derive the optimal policy.
Additionally, their approach is approximate, based on
sampling, contrary to the extended ARM framework.
From a theoretical perspective, we defined the
non-stationary and deterministic observation MDP
(NS-DOMDP) and proved several properties with re-
spect to NS-DOMDPs. This includes that given an
underestimate (V
expert
) of the value of the optimal pol-
icy for an environment (with non-stationary observa-
tions), the extended ARM framework is guaranteed to
learn an MRM that will allow a policy with value at
least V
expert
to be computed.
The proposed framework provides a minimal
MRM, which results in a minimal extension of the
state space that fully entails all of the necessary infor-
mation to transform the problem into a process with
Markov behavior. In this way, the algorithm is more
principled than other developed techniques for MDPs
with uncertainty, that suffer from a trade-off between
minimal extension and computational efficiency for
policy derivation (Thi
´
ebaux et al., 2006).
An interesting direction for future work is to make
the learning phase more efficient. In the extended
ARM algorithm the structure of the labelling function
is assumed to be known in order to make MQs fea-
sible. Simultaneous learning of the labelling function
Learning Optimal Behavior in Environments with Non-stationary Observations
735

definition could be possible, when MQs can be tagged
as ’impossible’ if they are not answered in reasonable
time (Gaon and Brafman, 2020; Xu et al., 2021). Tra-
ditionally, actions in MDPs are stochastic, so it is pos-
sible that a feasible MQ is tagged as negative. How-
ever, a large number of MQs is answered, so the prob-
ability of including false negatives is low.
Since the labeling function in this work is al-
ways deterministic, we could transform POMDPs
into (fully observable) MDPs. If observations
are stochastic (i.e. noisy), this would be impos-
sible. Unfortunately, we are dealing with non-
stationarity, which make traditional techniques for
solving POMDPs inapplicable. Literature on non-
stationary POMDPs with stochastic observatin func-
tions does exist (Peshkin et al., 1999; Shani et al.,
2005; Jaulmes et al., 2005; Chatzis and Kosmpou-
los, 2014). One could also consider literature regard-
ing partial observability, proposing the use of stochas-
tic action plans (Meuleau et al., 1999) and stochastic
policies (Sutton and Barto, 2018).
ACKNOWLEDGEMENTS
The second author was supported by the EOS project
(No. 30992574).
REFERENCES
Angluin, D. (1987). Learning regular sets from queries
and counterexamples. Information and computation,
75(2):87–106.
Bacchus, F., Boutilier, C., and Grove, A. (1996). Rewarding
behaviors. In Proceedings of the National Conference
on Artificial Intelligence, pages 1160–1167.
Bellman, R. (1957). A markovian decision process. Journal
of mathematics and mechanics, 6(5):679–684.
Bertsekas, D. (2012). Dynamic programming and optimal
control: Volume I, volume 1. Athena scientific.
Cassandra, A. R., Kaelbling, L. P., and Littman, M. L.
(1994). Acting optimally in partially observable
stochastic domains. In Aaai, volume 94, pages 1023–
1028.
Chatzis, S. P. and Kosmpoulos, D. (2014). A non-
stationary partially-observable markov decision pro-
cess for planning in volatile environments. OPT-
i 2014 - 1st International Conference on Engineer-
ing and Applied Sciences Optimization, Proceedings,
2014:3020–3025.
Gaon, M. and Brafman, R. (2020). Reinforcement learn-
ing with non-markovian rewards. In Proceedings of
the AAAI Conference on Artificial Intelligence, vol-
ume 34, pages 3980–3987.
Jaulmes, R., Pineau, J., and Precup, D. (2005). Learning
in non-stationary partially observable markov deci-
sion processes. In ECML Workshop on Reinforcement
Learning in non-stationary environments, volume 25,
pages 26–32.
Kaelbling, L. P., Littman, M. L., and Cassandra, A. R.
(1998). Planning and acting in partially observable
stochastic domains. Artificial intelligence, 101(1-
2):99–134.
Kolobov, A. (2012). Planning with markov decision pro-
cesses: An ai perspective. Synthesis Lectures on Arti-
ficial Intelligence and Machine Learning, 6(1):1–210.
Meuleau, N., Peshkin, L., Kim, K.-E., and Kaelbling, L. P.
(1999). Learning finite-state controllers for partially
observable environments. In Proceedings of the Fif-
teenth Conference on Uncertainty in Artificial Intelli-
gence (UAI).
Peshkin, L., Meuleau, N., and Kaelbling, L. P. (1999).
Learning policies with external memory. In ICML.
Rens, G., Raskin, J.-F., Reynouard, R., and Marra, G.
(2021). Online learning of non-markovian reward
models. In Proceedings of the 13th International Con-
ference on Agents and Artificial Intelligence - Volume
2: ICAART,, pages 74–86. INSTICC, SciTePress.
Ross, S. M. (2014). Introduction to stochastic dynamic pro-
gramming. Academic press.
Shani, G., Brafman, R., and Shimony, S. (2005). Adap-
tation for changing stochastic environments through
online pomdp policy learning. In Proc. Eur. Conf. on
Machine Learning, pages 61–70. Citeseer.
Singh, S. P., Jaakkola, T., and Jordan, M. I. (1994). Learn-
ing without state-estimation in partially observable
markovian decision processes. In Machine Learning
Proceedings 1994, pages 284–292. Elsevier.
Sutton, R. and Barto, A. (2018). Reinforcement Learning:
An Introduction. MIT Press, Cambridge and London,
2nd edition.
Thi
´
ebaux, S., Gretton, C., Slaney, J., Price, D., and Ka-
banza, F. (2006). Decision-theoretic planning with
non-markovian rewards. Journal of Artificial Intelli-
gence Research, 25:17–74.
Toro Icarte, R., Waldie, E., Klassen, T., Valenzano, R., Cas-
tro, M., and McIlraith, S. (2019). Learning reward ma-
chines for partially observable reinforcement learning.
Advances in Neural Information Processing Systems,
32:15523–15534.
White III, C. C. and White, D. J. (1989). Markov deci-
sion processes. European Journal of Operational Re-
search, 39(1):1–16.
Xu, Z., Wu, B., Ojha, A., Neider, D., and Topcu, U. (2021).
Active finite reward automaton inference and rein-
forcement learning using queries and counterexam-
ples. In International Cross-Domain Conference for
Machine Learning and Knowledge Extraction, pages
115–135. Springer.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
736
