
Towards an Ensemble Approach for Sensor Data Sensemaking
Athanasios Tsitsipas
a
Institute of Information Resource Management, Ulm University, Ulm, Germany
Keywords:
Sensor Data Sensemaking, Hybrid, Stream Reasoning, Abduction, Shapeoids.
Abstract:
In a world of uncertainty and incompleteness, one must “make sense” of found observations. Cyber-physical
systems output large quantities of data, opening massive opportunities and challenges for scalable techniques
to gain exciting insights. One intriguing challenge is the process of Sensor Data Sensemaking. The research
presents an approach to handle this process by bringing together the strands of data and knowledge in a single
architecture in an interpretable and expressive way. Differently from other works, the use of interpretable
patterns from streaming data is in the spotlight. In addition, background knowledge over these patterns gasps
the intention to give meaning to these patterns with several possible explanations. A hybrid implementation
realises the approach following big data processing models.
1 INTRODUCTION
Imagine an infrastructure with various sensors de-
ployed, witnessing a flux in the data from a specific
sensor. There could be multiple applications and use
cases treating this “phenomenon” as an anomaly or
just the typical operation of this sensor. The impor-
tance of the flux is interchangeable in any of the two
cases. A malfunction, or a complete failure of this
sensor, can lead to internal issues or shortcomings for
the system in place. Indirect Sensing (IS) is a com-
pelling approach to treating such cases. Indirect Sens-
ing (IS) is where single or different sensor composi-
tions deliver the same information when the property
in need is no longer attainable to direct sense. There-
fore, other alternative sources may continuously pro-
vide streaming data that might contain the missing in-
formation implicitly. However, making sense (Cook,
2007) of sensor data to tackle this uncertainty and
incompleteness in the environment is necessary for
gaining exciting insights.
One approach that arises naturally for such use
cases is classification as part of pattern recognition
assigning observations to various classes. For ex-
ample, in the context of IS, the authors in (Laput
et al., 2017) use the streaming data as an input to
a supervised learning algorithm and thus create a
model that approximates the real-world’s “image” to
an understandable format for a machine. To enhance
the robustness of such a model requires a substan-
a
https://orcid.org/0000-0001-9122-6408
tial amount of training data transforming fundamen-
tal values that need to be categorised into features
to calculate distances between them later. Such ef-
forts fall under catch-phrases like Machine Learning
or Deep Learning. However, both follow the same in-
tuition to explore the input data for prediction, retro-
diction, and imputation tasks. While this approach
is prodigious for making comparisons between such
items (i. e., data) and clustering them accordingly,
they share to a degree the natural incentive of “mak-
ing sense”. However, recent studies have shown that
making sense of sensor data should be more than just
a classification task (Teijeiro and Félix, 2018; Evans
et al., 2021).
Sensor Data Sensemaking (SDS) is a process in
Human-Computer Interaction (HCI). Participants in
field studies interpret and understand their environ-
ments and the behaviour of complex systems by
“reading off” historical data using situated knowl-
edge (Kurze et al., 2020). The human brain can distin-
guish or observe similarities in features from data as
patterns (Neisser, 2014); use them as evidence which
ought to explain by guessing the underlying process
that caused such observations. Hence, the main re-
search question is how to handle IS under a machine-
based SDS process in a human-centred manner. The
research assumes that making sense of sensor data in
IS requires a theory under explicit symbol manipula-
tion, most commonly referred to and understood as
methods based on formal logic.
Additionally, it is similar to current trends in
Tsitsipas, A.
Towards an Ensemble Approach for Sensor Data Sensemaking.
DOI: 10.5220/0010898800003122
In Proceedings of the 11th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2022), pages 323-329
ISBN: 978-989-758-549-4; ISSN: 2184-4313
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
323
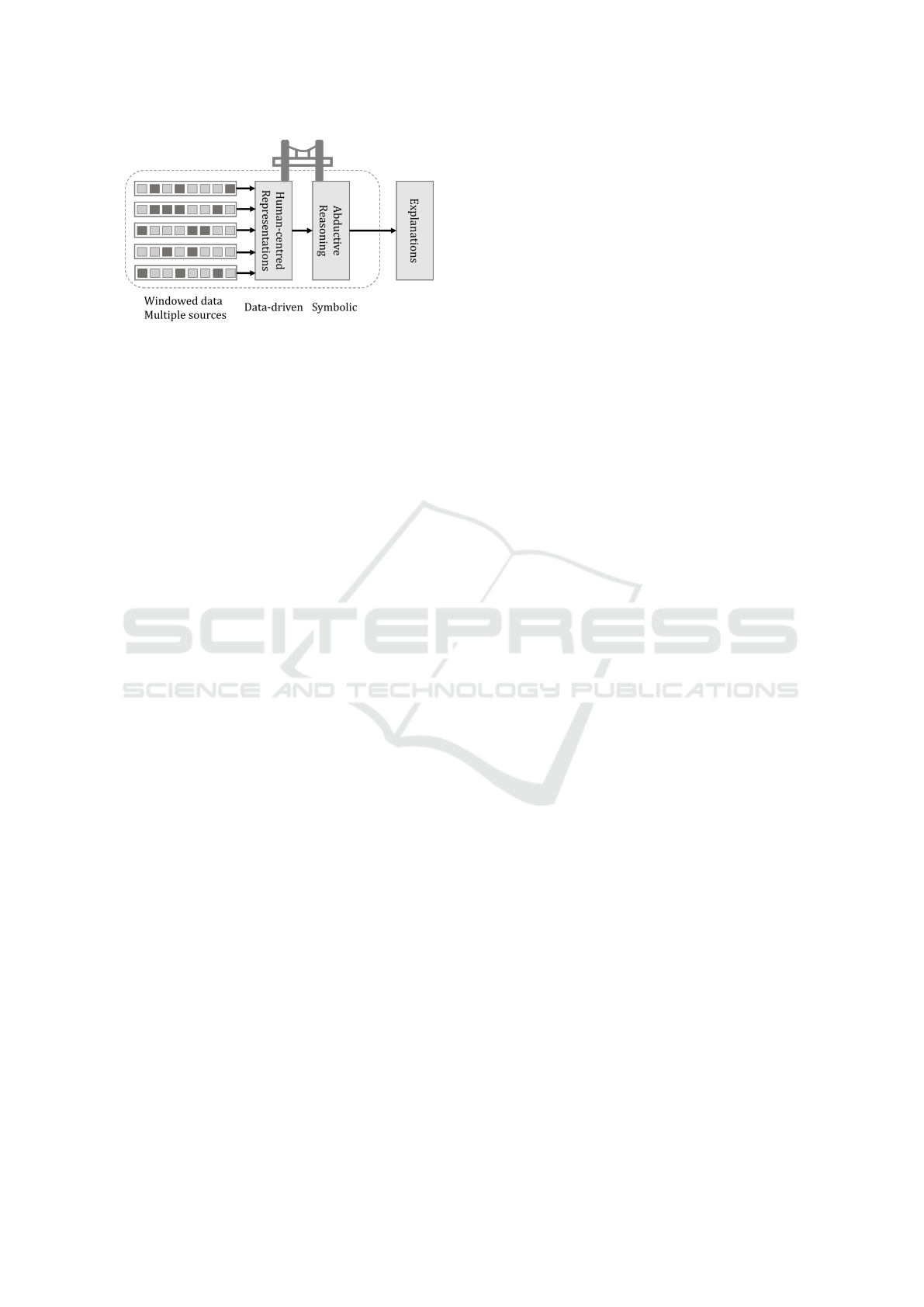
Figure 1: The ensemble approach bridges data-driven
human-centred representations from streaming data and
symbolic abductive reasoning.
modern Artificial Intelligence (AI), under its subfield
Neuro-Symbolic AI, which focuses on merging the
neural and symbolic regimes in AI research (Saker
et al., 2021). The process of SDS is following mod-
ern applications of data work (Fischer et al., 2016;
Fischer et al., 2017), which consists of three essen-
tial aspects laying down the proposed approach: (i) as
part of human cognition requires a representation of
objects, actions, numbers and space (Spelke and Kin-
zler, 2007), which persist and evolve, (ii) a key com-
ponent in human commonsense is the construction of
an explanation for the observed phenomenon (Marcus
and Davis, 2019; Lake et al., 2017), (iii) finally, the
research postulates that making sense of sensor data
series is possible for someone to fathom it by spec-
ulating the presence of an unobserved cause, which
accounts for and characterises the view of the sen-
sor data (McCarthy, 2006; Inoue et al., 2009; Teijeiro
and Félix, 2018). The occurred phenomenon con-
sists of unobserved entities (i. e., environmental prop-
erties) that causally interact with the mechanics of
the sensors to produce a dimensional footprint trans-
lated to the real-valued sensor reaction received as in-
put. Thus, the approach to tackle the problem of IS
using low-level processing to extract representations
and high-level processes as innate abductive reason-
ing (Schurz, 2016) becomes ubiquitous to the under-
lying research areas in Structural Pattern Recognition,
Logic and Stream Reasoning, following the field of
Knowledge Representation and Reasoning (KRR).
The novelty and advance of the approach weights
in an amalgamation of the following contributions.
The first contribution is to develop and extract human-
centred representations for mapping the time series
sensor data to symbolic lexical constructs that con-
stitute the primary objects for the following step.
The second contribution is a declarative reasoning
method via abduction, employing commonsense and
domain knowledge to exploit the above lexical con-
structs from the sensor data as explanations for their
occurrence. The approach uses probabilistic graph-
ical models, which seamlessly bridge the worlds of
probability and logic-based programming. Finally, ar-
chitecture and implementation are imperative for an
integrated stream reasoning framework for the SDS
process facilitating the IS approach, forming a sensor
fusion and a reasoning pipeline. Figure 1 illustrates
a high-level view of the hybrid approach for the SDS
process.
Section 2 presents a brief overview of the related
work. Next, an enumeration of the focused research
questions and the approach addressing them reside in
Section 3 and Section 4, respectively. Finally, a brief
overview of the main contributions in Section 5 and a
short conclusion in Section 6 finalise the paper.
2 RELATED WORK
Sensemaking is an active area in HCI and has seen
many studies on how people perceive and understand
complex organisations of information (Fischer et al.,
2016; Kurze et al., 2020). It actively involves the
cognitive state of mind of Situational Awareness to
analyse and assess dynamic problem environments.
Automated methods for sensemaking support have
been surveyed in (Llinas, 2014). The survey in-
cludes conceptual sensemaking models and analytic
tool suites (ATS), primarily visualisation-based oper-
ations. The current research employs various tech-
niques and methods to emulate the sensemaking pro-
cess in HCI as part of an integrated framework. Ob-
serving structural primitives in time series data from a
graph lends from Structural Pattern Recognition (Ol-
szewski, 2001) and examing the hypothesis synthe-
sis as an abductive reasoning process (Glass, 2019)
formulates the final approach. In addition, the re-
search includes a realisation of the sensemaking pro-
cess over streaming sensor data. Therefore, each part
contains individual challenges tackled in the respec-
tive research area. The reader has some pointers to
the author’s previous work (Tsitsipas and Schubert,
2021a; Tsitsipas et al., 2021).
Stream reasoning (Della Valle et al., 2009) is
a relatively new field from almost the last decade.
It aims to bridge the gap between stream process-
ing and reasoning. Different communities cover as-
pects of it when the scale moves solely on each side.
Data Stream Management Systems (DSMSs) (Go-
lab and Özsu, 2003) cover the element of man-
aging low-level, high-throughput data using con-
tinuous queries, but hardly ever they consider in-
complete information. Complex Event Processing
(CEP) (Cugola and Margara, 2012) approaches ex-
ICPRAM 2022 - 11th International Conference on Pattern Recognition Applications and Methods
324
press high-level events in compositions of single in-
coming events. They use probabilistic methods (Tran
and Davis, 2008; Wasserkrug et al., 2010; Skarlatidis
et al., 2015) to handle uncertainty in incoming data.
The research follows these systems, especially where
Markov Logic Networks has a central role. However,
these approaches usually operate over a static dataset
and do not realise a dynamic scenario for inference
over dynamic data. The issue is mainly because a
Markov Logic Network requires all the available ev-
idence before the inference. The research work ap-
plies a partial solution using the method of soft evi-
dence (Jain and Beetz, 2010). Recently, a survey ex-
amined how Complex Event Recognition could jump
to the Big Data era (Giatrakos et al., 2020). Although,
in line with the work, their interests are around event
forecasting and inductive logic programming (ILP).
Furthermore, in KRR, novel methods and ap-
proaches for representation and reasoning over
streaming input exist but lack the scalability over
the velocity of data. KRR yields the research be-
hind non-monotonic logic and abductive reasoning as
guiding methods for commonsense reasoning (Davis,
2017). Many authors are working on visual under-
standing, utilising commonsense knowledge for ab-
ductive high-level explanations (Suchan et al., 2019;
Le-Phuoc et al., 2021). However, although they use
neural models for finding the required representa-
tions, they do not use domain-independent semantics
on the model-based processing or the data process-
ing steps. Therefore, generality is not guaranteed by
their approaches. Moreover, the authors in (Kate and
Mooney, 2009) examine the application of abduction
in Markov Logic Networks, with a recent application
to root cause analysis in IT infrastructures (Schoen-
fisch et al., 2018). However, the application does not
foresee a dynamic scenario; instead, it includes stati-
cally generated evidence for the failure events of the
IT components.
Finally, an architecture for bridging the sense-
reasoning gap for stream reasoning developed in the
context of unmanned aerial vehicles (UAVs), named
DyKnow(Heintz et al., 2010) and extended in a robot
operating system for adaptively applied stream pro-
cessing (De Leng and Heintz, 2016). The main sepa-
ration factor between this pioneering work in the area
and the current research work is the absence of gen-
erality expressing the SDS process. DyKnow oper-
ates on raw data using threshold-based static queries
to extract the low-level abstractions for high-level
cognitive functions for agent systems. There is a
lack of human-centred data representations and the
general concept of sensemaking (including reasoning
processes, e. g., abduction).
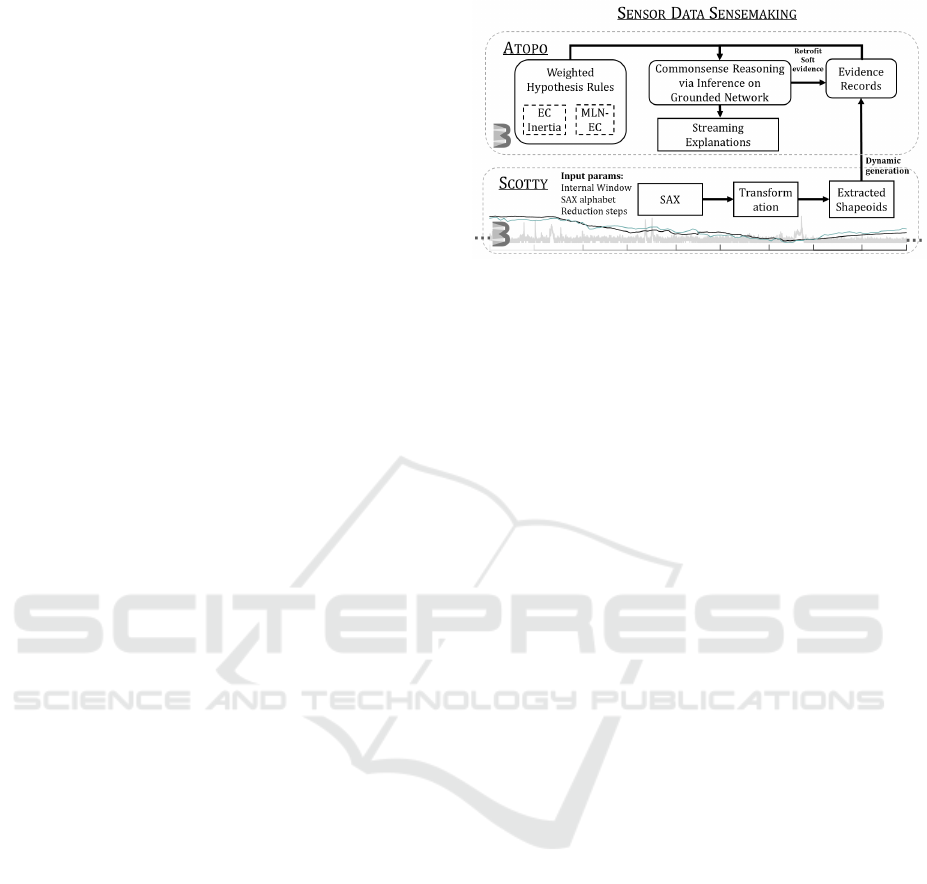
Figure 2: A diagram of the significant dataflows in the hy-
brid architecture realising the SDS process.
3 RESEARCH QUESTIONS
The work to alleviate the challenges formulated in the
introduction poses the following research questions to
separate the overall approach logically:
RQ1: Which symbolic descriptions (human-centred)
from low-level sensor data the SDS process re-
quires, and how to extract them?
RQ2: How to employ commonsense and domain
knowledge to exploit the sensor data dimensional
footprint of an unobserved cause as an explana-
tion for its occurrence?
RQ3: How to scale the SDS process in an advanced
stream reasoning framework?
4 RESEARCH APPROACH
The approach is driven by developing an expressive
SDS artefact within the realm of stream reasoning.
As such, it explores the interplay between a data-
driven human-centred primitive pattern extraction and
a knowledge-driven inference method. They support
both a quantitative view on symbolic representations
from streaming data and a qualitative view on com-
plex interrelations of properties and features of an IS
task. A principal approach conciliates the gap be-
tween sensing and reasoning in a streaming setting in
research work. Given the magnitude and complexity
of the problem, addressing each issue and challenge
in the respective field is essential to finally move to-
wards the hybrid architecture of the approach.
Lexical Sensor Observation (LSO). An investiga-
tion of techniques and methods from time series rep-
resentation and more concretely focus on symbolic
representations accommodates the approach. The
study of subsymbolic and neural processes are not
foreseeable in work. Whereas they contain power-
Towards an Ensemble Approach for Sensor Data Sensemaking
325

ful tools for exploring large amounts of data, the re-
sulting feature space is in a numerical representation
that needs further interpretation to translate to human-
centred encodings. The emphasis in work is on how
a human can observe and describe a time series se-
quence by locking to some points of interest to per-
ceive a general shape or pattern (Agrawal et al., 1995;
Bakshi and Stephanopoulos, 1995). The exciting area
of shape-based extraction (Siddiqui et al., 2020) acts
as an inspiration to describe a time series of sensor
perturbations in natural language constructs. The ex-
tracted low-level representations from the sensor data
series act as interpretable LSOs and can compose
more complex shapes expressing their relationships
via sequential operators.
Declarative Hypothesis Model (DHM). Formal
logic is the only epistemically sufficient representa-
tion (Davis, 2017) to encode commonsense and do-
main knowledge in a declarative and expressive man-
ner. The process of sensemaking is naturally an
abductive reasoning process (non-monotonic). Ini-
tially, there is inherent uncertainty in the sensor data,
the pattern extraction, and the different conjectures
(i. e., DHM) created during the SDS process. A
prompt hypothesis should be retracted when more
data is available or a non-perfect logical rule as a hy-
pothesis. In addition, a formalism to guide the process
of reasoning is required, as the semantics and the de-
notations of logic needed for the hypothesis encoding
should be domain-independent.
From Hypotheses to Explanations (HE). The re-
search approach uses as commonsense knowledge the
various encoded hypotheses qua alternatives for an IS
task. They are expressed adequately in the form of
logical language. The evaluation of the hypotheses
rules is implemented as an approximately valid infer-
ence concerning the logic. The inference techniques
in the respective logic are necessary to evaluate the
correctness of the SDS process.
A Hybrid Architecture. As a final step, the re-
search work provides a realisation of the approach
to streaming sensor data. A novel and unified data
processing programming model implements the SDS
process capable of high-level abduction over stream-
ing sensor data. A qualitative evaluation of the over-
all research outcome against a set of requirements for
principal approaches attempting to bridge the gap be-
tween sensing and reasoning (Heintz, 2009) is pre-
sumptive for its resilience.
5 CONTRIBUTIONS
The following contributions realise the approach and
thus provide evidence to counter the constituted ques-
tions. Figure 2 acts as an accompanying illustration,
with more elaborate descriptions of the contribution’s
internal steps.
5.1 Human-centred Representation for
Data-driven Patterns
The process of SDS requires low-level symbolic rep-
resentations of sensor data as patterns that are human-
understandable (e. g., in natural language). The ap-
proach offers the time series representation in a
“morphable” manner by proposing lexical shape-like
primitives, named shapeoids (Tsitsipas and Schubert,
2021b). It utilises the Symbolic Aggregate Approx-
imation (SAX) (Lin et al., 2003) method. On top of
SAX, developing a string-based algorithm for extract-
ing this set of primitive data-driven lexical constructs
constitutes the creation of the shapeoids. A novel
framework named SCOTTY (Tsitsipas et al., 2021) en-
compasses this functionality implemented in Java and
based on an open-source implementation
1
of SAX.
For the sake of conciseness, the reader may regard
the shapeoids: (i) An ANGLE is a gradual and con-
tinuous increase or decrease, (ii) A HOP describes
a distinctive phase shift leading to an overall visible
change, (iii) The HORN is a temporary effect which
fades quickly, as the end of the pattern returns almost
to the initial point, and (iv) The FLAT is an almost
sturdy line with small variations in the curve. The
shapeoids offer a comprehensive view of the time se-
ries data. SCOTTY can process around a million sin-
gle data points, in not more than six seconds, with a
time and space complexity of O(N).
Additionally, its evaluation has shown interesting
capabilities in time series representation in pattern
recognition. During the evaluation, a declarative clas-
sifier was built, based on SCOTTY, competing with
state-of-the-art algorithms in the area. The evalua-
tion uses the Cylinder-Bell-Funnel dataset from the
UCR archive (Dau and Keogh et al., 2018). For the
SDS process, SCOTTY should run over a sliding win-
dow with a parameterised configuration on the win-
dow size to overcome the limitation of the underlying
method of SAX, which performs in an internal step a
statistical computation, requiring bounded data.
1
https://github.com/jMotif/SAX
ICPRAM 2022 - 11th International Conference on Pattern Recognition Applications and Methods
326

5.2 Expressive High-level Abductive
Reasoning
Rooted in Markov Logic Networks (MLN) (Richard-
son and Domingos, 2006), the framework named
ATOPO (Tsitsipas and Schubert, 2021a) is designed
for integration as a reasoning engine for the hybrid ar-
chitecture of the SDS. It leverages the available com-
monsense knowledge to express the alternative hy-
potheses for the task of IS. It employs axioms from
the Event Calculus (EC) (Kowalski and Sergot, 1989;
Mueller, 2014) to enforce the persistence of objects
whose value change over time by keeping them as
hard-constrained rules in the resulting Markov Net-
work. MLN combines the expressiveness of first-
order logic and uses concepts from probability the-
ory to tackle uncertainty. The knowledge engineer-
ing process for the SDS consists of definite clauses
in first-order logic with assigned weights in front of
them indicating their probability degree. The man-
ual assignment of weight is part of the sensemaking
process. It is an aspect of the commonsense reason-
ing stating if they support (positive weight) or pe-
nalise (negative weight) worlds in which the corre-
sponding hypotheses are satisfied instead of classical
logic, where all the statements are hard-constrained.
The EC inertia laws must always remain as hard con-
straints, because otherwise during the inference pro-
cess, the hypotheses rules’ probabilities will eventu-
ally converge to be equiprobable (Skarlatidis et al.,
2015).
The implementation of commonsense reasoning is
a valid inference (Davis, 2017) within MLN, calculat-
ing the joint probability distribution of the grounded
Markov Network, using approximation techniques
because the direct computation of the formula is in-
tractable for large networks. ATOPO uses MC-SAT
to output the marginal probabilities. As mentioned
above, the knowledge base contains factual predicates
about the ground truth and the hypotheses rules en-
coded with domain-independent semantics. A hy-
pothesis is a clausal rule with the EC predicate Initi-
atedAt as the head. Its body contains Happens predi-
cates with the recognised shapeoid from a sensor and
other contextual constraints (e. g., sensor type, suit-
able location). The queried fluent in the EC predi-
cate HoldsAt, is a possible quantification over veri-
fying an explanation for LSO findings from the raw
sensor data. Finally, ATOPO uses an open-source
implementation of Markov Logic Networks, named
LoMRF (Skarlatidis and Michelioudakis, 2014) and
implemented in Scala, which is also its development
language. To support the non-monotonic semantics of
EC, LoMRF performs circumscription via predicate
completion (Skarlatidis et al., 2015).
The evaluation of ATOPO in a situational
awareness use case with IS, utilises a real-world
dataset (Birnbach et al., 2019). The authors collected
various sensor data while performing different activ-
ities. In the context of its evaluation ATOPO ran in a
static setting, requiring manual encodings for the in-
ternal representations in the knowledge base and the
evidence for recognising an opened window from the
data using five in total surrounding sensors (e. g., tem-
perature, air quality). The evaluation showed promis-
ing results even if selecting a rigorous setting to calcu-
late the performance measures, referencing the times-
tamps of the ground truth (i. e., when the window’s
status is open or closed, based on a contact sensor).
While engaging the SDS process, the visible dimen-
sional footprint of the action (e. g., opening the win-
dow) eventuates with a delay as it takes some time un-
til the opened window affects, for example, the tem-
perature sensor sufficiently.
5.3 An Integrated Framework for SDS
The final contribution is the integrated framework
implemented on top of Apache Beam
2
. It provides
a unified programming model, offering common el-
ements of data processing frameworks (e. g., win-
dowing, transform functions), supporting batch and
stream processing and running on many execution
engines. Hence, the solution’s potential is scalable
to clustered data processing platforms (e. g., Apache
Flink, Apache Spark). The architecture enables the
SDS in a setting under streaming use cases. Apache
Beam allows SCOTTY to run over multivariate sensor
data in a streaming setting. Additionally, it retrofits
ATOPO in a reasoning pipeline, executing determin-
istic runs of inference on the grounded Markov Net-
works over a sliding window. It supports incremental
reasoning, as the previous states and inference results
propagate as evidence and maximum a posteriori ele-
ments, respectively, to the following sliding window.
Finally, the research work provides evidence for the
compliance of the hybrid implementation by comply-
ing with the requirements of a knowledge processing
middleware (Heintz, 2009).
6 CONCLUSION
The paper presents an “ensemble” approach for SDS.
It extracts human-centred data-driven primitives from
time series data, representing people’s mental mod-
2
https://beam.apache.org/
Towards an Ensemble Approach for Sensor Data Sensemaking
327

els in an SDS process. A knowledge-driven method
based on theoretical formalism supports the reason-
ing steps for expressing alternative hypotheses that
explain the extracted observations in an IS setting.
The individual parts of the work have been pub-
lished in various conferences on Artificial Intelli-
gence, Big Data and Pattern Recognition. In addi-
tion, the solution includes a prototype implementation
with a hybrid architecture under modern data process-
ing frameworks. SDS constitutes a significant chal-
lenge to solve, as many state-of-the-art research fields
have the same incentive under different settings: how
to bridge data with knowledge. The outcome of the
work comes to the fore to explain the occurrence of
primitive structures in time series data by assuming
an underlying reality that triggered them.
Furthermore, when submitting this paper to the
conference, the open position of evaluating the prim-
itive structures for the SDS process in other domains,
where a sensor is not physical but software-based vir-
tual (Martin et al., 2021), was submitted and accepted
in parallel to another conference (Tsitsipas et al.,
2022). Finally, the current research work opens the
field on the sparsity of other different primitive data
structures for domain-dependent scenarios and how
the SDS process can be realised in a neuro-symbolic
approach while maintaining a human-centred manner.
ACKNOWLEDGEMENTS
Germany’s Federal Ministry of Education and Re-
search (BMBF) has partially funded the research un-
der the project HorME.
REFERENCES
Agrawal, R., Psaila, G., Wimmers, E. L., and Zaït, M.
(1995). Querying shapes of histories. In Proceedings
of the 21th International Conference on Very Large
Data Bases, pages 502–514.
Bakshi, B. R. and Stephanopoulos, G. (1995). Reasoning in
time: Modeling, analysis, and pattern recognition of
temporal process trends. Advances in Chemical Engi-
neering, 22(C):485–548.
Birnbach, S., Eberz, S., and Martinovic, I. (2019). Peeves:
Physical event verification in smart homes. In Pro-
ceedings of the 2019 ACM Conference on Computer
and Communications Security. ACM.
Cook, D. J. (2007). Making sense of sensor data. IEEE
Pervasive Computing, 6(2):105–108.
Cugola, G. and Margara, A. (2012). Processing flows of
information: From data stream to complex event pro-
cessing. ACM Computing Surveys (CSUR), 44(3):1–
62.
Dau, H. A. and Keogh et al., E. (2018). The ucr time series
classification archive.
Davis, E. (2017). Logical formalizations of commonsense
reasoning: a survey. Journal of Artificial Intelligence
Research, 59:651–723.
De Leng, D. and Heintz, F. (2016). Dyknow: A dynam-
ically reconfigurable stream reasoning framework as
an extension to the robot operating system. In 2016
IEEE International Conference on Simulation, Model-
ing, and Programming for Autonomous Robots (SIM-
PAR), pages 55–60. IEEE.
Della Valle, E., Ceri, S., Van Harmelen, F., and Fensel,
D. (2009). It’s a streaming world! reasoning upon
rapidly changing information. IEEE Intelligent Sys-
tems, 24(6):83–89.
Evans, R., Hernández-Orallo, J., Welbl, J., Kohli, P., and
Sergot, M. (2021). Making sense of sensory input.
Artificial Intelligence, 293:103438.
Fischer, J. E., Crabtree, A., Colley, J. A., Rodden, T., and
Costanza, E. (2017). Data work: how energy advisors
and clients make iot data accountable. Computer Sup-
ported Cooperative Work (CSCW), 26(4):597–626.
Fischer, J. E., Crabtree, A., Rodden, T., Colley, J. A.,
Costanza, E., Jewell, M. O., and Ramchurn, S. D.
(2016). " just whack it on until it gets hot" working
with iot data in the home. In Proceedings of the 2016
CHI Conference on Human Factors in Computing Sys-
tems, pages 5933–5944.
Giatrakos, N., Alevizos, E., Artikis, A., Deligiannakis, A.,
and Garofalakis, M. (2020). Complex event recogni-
tion in the big data era: a survey. The VLDB Journal,
29(1):313–352.
Glass, D. H. (2019). Competing hypotheses and abductive
inference. Annals of Mathematics and Artificial Intel-
ligence, pages 1–18.
Golab, L. and Özsu, M. T. (2003). Issues in data stream
management. ACM Sigmod Record, 32(2):5–14.
Heintz, F. (2009). DyKnow: A stream-based knowl-
edge processing middleware framework. PhD thesis,
Linköping University Electronic Press.
Heintz, F., Kvarnström, J., and Doherty, P. (2010). Bridg-
ing the sense-reasoning gap: Dyknow–stream-based
middleware for knowledge processing. Advanced En-
gineering Informatics, 24(1):14–26.
Inoue, K., Furukawa, K., Kobayashi, I., and Nabeshima, H.
(2009). Discovering rules by meta-level abduction.
In International Conference on Inductive Logic Pro-
gramming, pages 49–64. Springer.
Jain, D. and Beetz, M. (2010). Soft evidential update
via markov chain monte carlo inference. In Annual
Conference on Artificial Intelligence, pages 280–290.
Springer.
Kate, R. J. and Mooney, R. J. (2009). Probabilistic abduc-
tion using markov logic networks. In In: IJCAI-09
Workshop on Plan, Activity, and Intent Recognition.
Kowalski, R. and Sergot, M. (1989). A logic-based calculus
of events. In Foundations of knowledge base manage-
ment, pages 23–55. Springer.
ICPRAM 2022 - 11th International Conference on Pattern Recognition Applications and Methods
328

Kurze, A., Bischof, A., Totzauer, S., Storz, M., Eibl, M.,
Brereton, M., and Berger, A. (2020). Guess the data:
Data work to understand how people make sense of
and use simple sensor data from homes. In Proceed-
ings of the 2020 CHI Conference on Human Factors
in Computing Systems, pages 1–12.
Lake, B. M., Ullman, T. D., Tenenbaum, J. B., and Gersh-
man, S. J. (2017). Building machines that learn and
think like people. Behavioral and brain sciences, 40.
Laput, G., Zhang, Y., and Harrison, C. (2017). Synthetic
sensors: Towards general-purpose sensing. In Pro-
ceedings of the 2017 CHI Conference on Human Fac-
tors in Computing Systems, pages 3986–3999.
Le-Phuoc, D., Eiter, T., and Le-Tuan, A. (2021). A scalable
reasoning and learning approach for neural-symbolic
stream fusion. In Proceedings of the AAAI Conference
on Artificial Intelligence, volume 35, pages 4996–
5005.
Lin, J., Keogh, E., Lonardi, S., and Chiu, B. (2003). A sym-
bolic representation of time series, with implications
for streaming algorithms. In Proceedings of the 8th
ACM SIGMOD workshop on Research issues in data
mining and knowledge discovery, pages 2–11.
Llinas, J. (2014). A survey of automated methods for sense-
making support. In Next-Generation Analyst II, vol-
ume 9122, page 912206. International Society for Op-
tics and Photonics.
Marcus, G. and Davis, E. (2019). Rebooting AI: Building
artificial intelligence we can trust. Vintage.
Martin, D., Kühl, N., and Satzger, G. (2021). Virtual sen-
sors. Business & Information Systems Engineering,
63(3):315–323.
McCarthy, J. (2006). Challenges to machine learning: Rela-
tions between reality and appearance. In International
Conference on Inductive Logic Programming, pages
2–9. Springer.
Mueller, E. T. (2014). Commonsense reasoning: an event
calculus based approach. Morgan Kaufmann.
Neisser, U. (2014). Cognitive psychology: Classic edition.
Psychology Press.
Olszewski, R. T. (2001). Generalized feature extraction
for structural pattern recognition in time-series data.
Carnegie Mellon University.
Richardson, M. and Domingos, P. (2006). Markov logic
networks. Machine learning, 62(1-2):107–136.
Saker, M. K., Zhou, L., Eberhart, A., and Hitzler, P. (2021).
Neuro-symbolic artificial intelligence. AI Communi-
cations, pages 1–13.
Schoenfisch, J., Meilicke, C., von Stülpnagel, J., Ortmann,
J., and Stuckenschmidt, H. (2018). Root cause anal-
ysis in it infrastructures using ontologies and abduc-
tion in markov logic networks. Information Systems,
74:103–116.
Schurz, G. (2016). Common cause abduction: The for-
mation of theoretical concepts and models in science.
Logic Journal of the IGPL, 24(4):494–509.
Siddiqui, T., Luh, P., Wang, Z., Karahalios, K., and
Parameswaran, A. (2020). Shapesearch: A flexible
and efficient system for shape-based exploration of
trendlines. In Proceedings of the 2020 ACM SIG-
MOD International Conference on Management of
Data, pages 51–65.
Skarlatidis, A. and Michelioudakis, E. (2014). Logical
Markov Random Fields (LoMRF): an open-source
implementation of Markov Logic Networks.
Skarlatidis, A., Paliouras, G., Artikis, A., and Vouros, G. A.
(2015). Probabilistic event calculus for event recog-
nition. ACM Transactions on Computational Logic
(TOCL), 16(2):1–37.
Spelke, E. S. and Kinzler, K. D. (2007). Core knowledge.
Developmental science, 10(1):89–96.
Suchan, J., Bhatt, M., and Varadarajan, S. (2019). Out of
sight but not out of mind: An answer set programming
based online abduction framework for visual sense-
making in autonomous driving. In Proceedings of the
Twenty-Eighth International Joint Conference on Arti-
ficial Intelligence, IJCAI 2019, Macao, China, August
10-16, 2019, pages 1879–1885. ijcai.org.
Teijeiro, T. and Félix, P. (2018). On the adoption of abduc-
tive reasoning for time series interpretation. Artificial
Intelligence, 262:163–188.
Tran, S. D. and Davis, L. S. (2008). Event modeling and
recognition using markov logic networks. In Euro-
pean Conference on Computer Vision, pages 610–623.
Springer.
Tsitsipas, A., Eisenhart, G., Seybold, D., and Wesner, S.
(2022). Scalable shapeoid recognition on multivariate
data streams with apache beam. In Proceedings of the
Computing Conference 2022, forthcoming. Springer.
Tsitsipas, A., Schiessle, P., and Schubert, L. (2021). Scotty:
Fast a priori structure-based extraction from time se-
ries. In 2021 IEEE International Conference on Big
Data (BigData 2021), forthcoming.
Tsitsipas, A. and Schubert, L. (2021a). Modelling and
reasoning for indirect sensing over discrete-time via
markov logic networks. In Proceedings of the Twelfth
International Workshop Modelling and Reasoning in
Context (MRC 2021). CEUR-WS.org.
Tsitsipas, A. and Schubert, L. (2021b). On group theory and
interpretable time series primitives. In Proceedings
of the Seventeenth International Conference on Ad-
vanced Data Mining and Applications (ADMA 2021),
forthcoming. Springer.
Wasserkrug, S., Gal, A., Etzion, O., and Turchin, Y. (2010).
Efficient processing of uncertain events in rule-based
systems. IEEE Transactions on Knowledge and Data
Engineering, 24(1):45–58.
Towards an Ensemble Approach for Sensor Data Sensemaking
329
