
A Smart Home Testbed for Evaluating XAI with Non-experts
Kevin McAreavey, Kim Bauters and Weiru Liu
Department of Engineering Mathematics, University of Bristol, U.K.
Keywords:
Explainable AI (XAI), Explainable Machine Learning, Explainable AI Planning (XAIP), Smart Homes.
Abstract:
Smart homes are powered by increasingly advanced AI, yet are controlled by, and affect, non-experts. These
non-expert home users are an under-represented stakeholder in the explainable AI (XAI) literature. In this
paper we facilitate future XAI research by introducing a family of smart home applications serving as a testbed
to evaluate XAI with non-experts. The testbed is a hybrid-AI system spanning several AI disciplines, including
machine learning and AI planning. Applications include a smart home battery and smart thermostatic radiator
valve (TRV). End-user functionality is representative of leading commercial products and relevant research
applications. The testbed is based on a flexible software architecture and web-based user interface, supports a
range of AI tools in a modular fashion, and can be easily deployed using inexpensive consumer hardware.
1 INTRODUCTION
Research into explainable AI (XAI) has seen rapid
growth in recent years (Arrieta et al., 2020; An-
jomshoae et al., 2019; Adadi and Berrada, 2018) yet
significant challenges still remain (Miller, 2019; Lip-
ton, 2018; Abdul et al., 2018), not least with regards
to evaluation (Hoffman et al., 2018).
Challenge 1: There is a need for explanations across
a wide range of AI subfields, including but not lim-
ited to machine learning (Biran and Cotton, 2017), AI
planning (Chakraborti et al., 2020), multi-agent sys-
tems (Kraus et al., 2020), and robotics (Anjomshoae
et al., 2019). Mirroring broader trends in AI, machine
learning is certainly the dominant branch of current
XAI research (Chakraborti et al., 2020), but for many
domains this trend is not necessarily representative of
deployed AI systems. For example, the general public
is increasingly exposed to AI via smart home appli-
cations (Guo et al., 2019), but in this domain there is
evidence that the use of symbolic AI is still more com-
mon than machine learning (Mekuria et al., 2019).
Hybrid AI systems (i.e. those combining several AI
subsystems) are also common in this setting (Mekuria
et al., 2019).
Challenge 2: AI systems typically involve a wide
range of stakeholders—both expert and non-expert—
and the types of explanations appropriate to each class
of stakeholder may differ significantly (Langer et al.,
2021). Recent machine learning research on XAI
has unfortunately tended to emphasise AI developers
at the expense of other stakeholders, especially non-
experts (Cheng et al., 2019). Arguably this reflects
a motivation centred on systems engineering, where
the outputs are intended to help machine learning ex-
perts better understand and debug their own systems,
rather than for e.g. non-experts to accept or trust the
adoption of those systems (Abdul et al., 2018). In the
smart home setting, studies have found that AI sys-
tems may frustrate and disempower non-experts due
to a lack of transparency (Yang and Newman, 2013).
Challenge 3: Evaluation of XAI research depends on
the existence of some core AI system that can pro-
vide functionality (its primary task) to stakeholders
regardless of any supplementary XAI features (Hoff-
man et al., 2018). This implies substantial overhead
for researchers around the development and/or de-
ployment of core AI systems that can sufficiently en-
gage target stakeholders and thus justify the need for
actual XAI features. While AI developers can be ex-
pected to engage with raw AI components, non-expert
stakeholders will typically engage with AI technol-
ogy indirectly via end-user features. This suggests
that evaluating XAI with non-expert stakeholders is
more time consuming than with AI developers, which
may partially explain the imbalance in current XAI
research (i.e. the low-hanging fruit argument). In any
case, it makes sense that a core AI system should be
representative of the kinds of AI system that a given
class of stakeholder will typically encounter.
In this paper we address the above challenges by
proposing a realistic smart home testbed to evaluate
McAreavey, K., Bauters, K. and Liu, W.
A Smart Home Testbed for Evaluating XAI with Non-experts.
DOI: 10.5220/0010908100003116
In Proceedings of the 14th International Conference on Agents and Artificial Intelligence (ICAART 2022) - Volume 3, pages 773-784
ISBN: 978-989-758-547-0; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
773

XAI with non-experts. Non-experts are chosen as an
important but under-represented class of stakeholder
within XAI research, while the smart home domain
is chosen as a leading source of AI faced by non-
experts. The testbed itself is comprised of two appli-
cations, namely a smart home battery offering elec-
tricity cost savings, and a smart thermostatic radiator
valve (TRV) for comfort and convenience. End-user
functionality is representative of leading commercial
smart home products, such as the Nest Learning Ther-
mostat, as well as relevant smart home applications in
the literature (e.g. Rogers et al., 2013; Shann et al.,
2017). Both applications have similar hybrid-AI de-
signs, comprised of low-level machine learning com-
ponents feeding into a high-level AI planning compo-
nent, while the underlying AI tools and algorithms are
modular. This design ensures that the testbed is appli-
cable to a wide range of AI and XAI methods. In
addition, we provide a software architecture and web-
based user interface that allows the testbed to be easily
deployed using inexpensive consumer hardware. This
alleviates many overheads encountered by researchers
when attempting to deploy AI systems in practice.
The remainder of the paper is organised as fol-
lows: in Section 2 we recall some relevant back-
ground from AI; in Section 3 we formalise our two
applications; in Section 4 we describe the overall
testbed; in Section 5 we discuss related work; and in
Section 6 we conclude, mentioning planned use of the
testbed in a scheduled research study on AI threats.
2 PRELIMINARIES
This section recalls some background on AI planning.
A (deterministic, cost-minimising) Markov decision
process or MDP is a tuple (S,A,T,C) where S is a set
of states, A is a set of actions, T : S × A → S is a tran-
sition function, and C : S × A → R is cost function.
Solutions to MDPs are optimal policies but are only
well-defined for certain classes of MDP, with the typi-
cal examples being finite-horizon MDPs and (infinite-
horizon) discounted-reward MDPs. In this paper we
are interested in the former. A finite-horizon MDP ex-
tends the standard MDP definition by including a (de-
cision) horizon t
max
∈ N with D = {1,. .. ,t
max
} the set
of timesteps. A (non-stationary) policy is a function
π : S × D → A where the cumulative cost of π in state
s ∈ S at timestep t ∈ N is defined as:
V (s,t, π) =
C(s, a)
+V (s
0
,t + 1,π)
if 1 ≤ t ≤ t
max
0 otherwise
(1)
such that a = π(s,t) and s
0
= T (s,a). A policy π
∗
is an
optimal policy if it minimises V (s,t,π
∗
) for all s ∈ S
and all t ∈ D. A finite-horizon MDP can be further
extended to include some initial state s
1
∈ S, in which
case solutions may be simplified to only account for
states that are reachable from s
1
. A policy is partial
if π(s,t) = undefined for some state s ∈ S and some
timestep t ∈ D. A partial policy is closed with re-
spect to state s
1
∈ S if π(s,t) 6= undefined for any state
s ∈ S and any timestep t ∈ D such that (s,t) is reach-
able from (s
1
,1) while executing π. Since the above
transition function is deterministic, any partial policy
π that is closed with respect to initial state s
1
∈ S can
be represented by a sequence of actions of length t
max
.
An optimal partial policy that is closed with respect to
state s
1
∈ S is thus a sequence of actions of length t
max
that minimises cost when executed from s
1
. Comput-
ing such a policy is equivalent to a variant of classi-
cal AI planning where states are time-indexed states
S×D, the goal is S ×{t
max
}, and the language permits
both costs and continuous state variables.
3 APPLICATIONS
This section introduces our two testbed applications,
formalises the technical details of their underlying AI
components, and provides some experimental results.
3.1 Smart Home Battery
Energy markets in Europe and beyond establish prices
through an auction process divided into half-hour
blocks. Prices thus change every half-hour and it is
the energy supplier who hedges the risk of fluctuating
prices on the inter-day market. With the emergence
of smart meters it has become possible for energy
providers, such as Octopus Energy in the UK or Engie
in Belgium, to introduce tariffs where the customer is
rewarded for consuming electricity when wholesale
prices are low by directly linking the customer tar-
iff to these half-hour blocks. The resulting tariffs are
known as dynamic or time-of-use tariffs and allow the
customer to reduce costs by scheduling flexible elec-
tricity consumption (e.g. washing machine cycles) so
as to benefit from price fluctuations.
In the case of Octopus Energy, prices are allocated
each day and cover the subsequent 24 hours. Prices
are determined by wholesale prices, which in turn de-
pend on external factors (e.g. availability of renew-
ables). Additionally, customers are permitted to sup-
ply electricity to the grid (e.g. generated by domestic
solar panels) where they are charged for consumption
according to import prices and receive payment for
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
774

supply according to export prices. Import prices have
an upper-bound of 35p/kWh and permit negative pric-
ing, meaning that customers may receive payment for
consumption. These negative import price events oc-
cur when supply significantly exceeds demand and it
is necessary to balance load on the grid. Export prices
have a lower-bound of 0p/kWh, meaning that in some
cases customers may receive no payment for supply-
ing electricity, but will never be charged for doing so.
Smart home batteries provide high-capacity stor-
age for surplus home electricity. Examples include
the Powervault 3 range and the Tesla Powerwall.
When combined with dynamic tariffs these batteries
have the potential to reduce customer costs if they
are charged when prices are low and discharged when
prices are high. For energy suppliers they help to
balance load on the grid, which is of particular con-
cern when faced with unpredictable renewable sup-
plies. The 8 kWh model of the Powervault 3 range
is currently priced in the UK at £8k, so in order to
break-even would require cost savings of £15.38 per
week over its 10 year warranty. This suggests that cur-
rent use of batteries in the above manner may not be
cost-effective, although the situation may change in
the future with advances to battery technology, or due
to increasing demand for other tasks such as at-home
charging of electric vehicles. Electricity prices have
in fact risen significantly in 2021 due to both supply
problems and e.g. a rise in the cost of EU Allowances
(EUA, also know as carbon credits) as countries con-
tinue to impose stricter CO
2
emission standards.
We now introduce our first application, which is
centred on scheduling a smart home battery to opti-
mise dynamic electricity costs, similar to the Power-
vault GridFLEX
1
feature. Note that batteries can be
simulated in practice if the substantial cost of real bat-
teries precludes installation in homes for short-term
evaluations. The schedule itself is defined for some
fixed period into the future (e.g. one week). Obvi-
ous issues include that dynamic prices are typically
known only for the immediate future (e.g. at most 24
hours in advance for Octopus Energy), while future
consumption is typically unknown. Predicting future
prices and consumption thus presents avenues for the
use of machine learning, especially in the form of re-
gression and time series forecasting (Hyndman and
Athanasopoulos, 2018). Optimal scheduling of bat-
tery (dis)charge actions then presents avenues for the
use of AI planning (Geffner and Bonet, 2013). The
combination of these two subfields makes the applica-
tion a hybrid-AI system. Target XAI stakeholders are
non-experts occupying the home, with explainable AI
planning needed to explain the schedule, and explain-
1
https://octopus.energy/blog/agile-powervault-trial/
able machine learning needed to explain predictions.
3.1.1 Scheduling Battery Control
We start by formalising the high-level AI planning
problem as follows:
Definition 1. A battery scheduling problem is a tuple
(β,s
1
,λ,t
max
,U,P
I
,P
E
) where:
• β ∈ R
≥0
is the (battery) capacity constant
• s
1
∈ [0,β] is the current (battery) level
• λ ∈ [0, β] is the (dis)charge rate per timestep
• t
max
∈ N is the horizon with D = {1,2,.. .,t
max
}
• U : D → R the (electricity) consumption forecast
• P
I
: D → R the (electricity) import price forecast
• P
E
: D → R the (electricity) export price forecast
Definition 1 assumes that all parameters are spec-
ified on the same unit scale (e.g. kWh). The function
U then encodes both electricity consumption and pro-
duction (e.g. from solar panels). Negative values are
permitted in U, P
I
, and P
E
, where they can be inter-
preted as follows: U(t) < 0 means that electricity pro-
duction would exceed consumption; P
I
(t) < 0 means
that payment would be received for consumption; and
P
E
(t) < 0 means that charges would be accrued for
(unwanted) supply. As mentioned before, dynamic
tariffs from Octopus Energy satisfy P
I
(t) ≤ 35p/kWh
and P
E
(t) ≥ 0p/kWh. We assume that timesteps map
to consecutive fixed-length time intervals. For exam-
ple, Octopus Energy prices are allocated in 30 minute
intervals, so a reasonable interval length might be any
factor of 30 minutes (e.g. 5 minutes).
Definition 2. Let (β,s
1
,λ,t
max
,U,P
I
,P
E
) be a battery
scheduling problem. A battery scheduling model is an
MDP (S,A, T,C,t
max
,s
1
) where:
• S = [0,β] is the set of (battery level) states
• A = {−1,0,1} is the set of (battery) actions with
1 the charge action, −1 the discharge action, and
0 the no-op action
• T : S ×A → S is the transition function defined for
each s ∈ S and each a ∈ A:
T (s,a) = min{β,max{0, s + aλ}} (2)
• C : S × D × A → R
≥0
is the cost function defined
for each s ∈ S and t ∈ D as:
C(s,t, a) = u
+
a
P
I
(t) + u
−
a
P
E
(t) −C
∗
(t) (3)
C
∗
(t) = min
(
u
+
max
P
I
(t) + u
−
max
P
E
(t),
u
+
min
P
I
(t) + u
−
min
P
E
(t)
)
(4)
A Smart Home Testbed for Evaluating XAI with Non-experts
775

where, given s and t:
u
a
=
U(t) + min{λ, β − s} if a = 1
U(t) − min{λ, s} if a = −1
U(t) if a = 0
(5)
u
max
= U(t) + λ (6)
u
min
= U(t) − λ (7)
such that x
+
= max{0,x} and x
−
= min{0,x} for
any x ∈ R
• t
max
∈ N is the horizon with D = {1,2,.. .,t
max
}
• s
1
∈ S is the initial state
Equation 4 is the minimal cost at timestep t ∈ D
based on either (i) a negative import price and a full
charge of λ units or (ii) a positive export price and a
full discharge of λ units. Equation 4 thus acts as a nor-
maliser to ensure that cost function C is non-negative.
It follows that C(s,t,a) + C
∗
(t) is the expected elec-
tricity price at timestep t ∈ D. Note that Equation 1
can be adapted to this setting by replacing C(s,a) with
C(s,t, a). An (optimal) partial policy π that is closed
with respect to state s
1
∈ S is also called an (optimal)
battery schedule. For the purpose of discussion, a
battery schedule π is applicable if π(0,t) 6= −1 and
π(β,t) 6= 1 for each t ∈ D.
Example 1. Let β = s
1
= 4.5 kWh, λ = 2.25 kWh,
and t
max
= 3, with U , P
I
, and P
E
as shown in Table 1.
The set of applicable battery schedules is shown in
Table 2 where π
1
is the optimal battery schedule hav-
ing cumulative cost V(s
1
,1, π
1
) = 40.29 and electric-
ity price = −32.22p. Savings of 93.53p are achieved
with π
1
over not using the battery (π
9
). If timesteps
map to a sequence of time intervals h[r
1
,r
2
),[r
2
,r
3
),
[r
3
,r
4
)i, then π
1
says that discharging should be ini-
tiated at timepoint r
1
, terminated at timepoint r
2
, and
reinitiated at timepoint r
3
.
An implication of non-stationary costs is that bat-
tery scheduling problems cannot be expressed (com-
pactly) in standard AI planning languages such as
PDDL. However, as discussed earlier, Equation 3
guarantees that cost function C is non-negative, mean-
ing that battery scheduling problems can still be
solved by standard search algorithms. Theoretically
Equation 2 means that any state-space search will visit
at most n = 2(
β
/λ) − 1 states (accounting for cases
where the initial state is not a multiple of λ), although
this equates to n · t
max
(time-indexed) search nodes.
This suggests that battery scheduling problems can be
efficiently solved in practice for large decision hori-
zons. Experimentally, we have found that random
battery scheduling problems with t
max
= 2016 can be
solved on average within 7.31 seconds using a simple
Python implementation
2
of uniform cost search run-
2
https://github.com/kevinmcareavey/chapp-battery
ning on a 2016 MacBook Pro (2 GHz Dual-Core Intel
Core i5 CPU, 16 GB 1867 MHz RAM).
Example 2. Let β = 8 kWh, λ = 0.2 kWh, s
1
= 0
kWh, and t
max
= 2016 such that timesteps map to 5-
minute intervals, i.e. timesteps cover 7 days and a full
(dis)charge takes 40 timesteps or 200 minutes. The
first plot in Figure 1 shows historic Octopus Energy
import
3
and export
4
prices for the London region in a
7-day period starting 00:00 on 28 February 2021. The
second plot shows real author-collected consumption
data for the same period. In the third plot the optimal
(resp. standard) price indicates the price that would
be charged with (resp. without) optimal use of a bat-
tery. The fourth plot shows the expected battery lev-
els while executing the optimal battery schedule, with
upward (resp. downward) slopes indicating where the
battery is being charged (resp. discharged). Savings
of £6.98 can thus be achieved for this 7-day period
compared to the standard price.
3.1.2 Predicting Electricity Prices
As defined, AI planning is used to optimise battery
control given future import and export prices. How-
ever, since dynamic prices are typically allocated for
the immediate future only (e.g. up to 24 hours for Oc-
topus Energy), predictions are needed for prices be-
yond this period. In machine learning this problem
corresponds to a regression problem over time series
data. A simple approach to solving such problems is
to encode time as a set of features (e.g. hour, day-of-
week) and then use standard regression techniques.
Suitable models can thus be learned in practice using
popular tools such as Scikit-learn (Pedregosa et al.,
2011). If models perform poorly when time and
price are the only features, then improvements may be
achieved with the inclusion of additional features that
are likely to correlate well with electricity prices (e.g.
weather). For example, a valuable source of data in
Britain is the carbon intensity forecast from National
Grid ESO, which is described as a 96+ hour forecast
of CO
2
emissions per kWh of consumed electricity.
5
Example 3. Figure 3 shows import price predictions
for Octopus Energy using standard regressors from
Scikit-learn. Models were trained on data for 2020
with the final 7 days (336 timesteps) reserved for
validation. Features include import price along with 5
3
https://api.octopus.energy/v1/products/AGILE-18-02-
21/electricity-tariffs/E-1R-AGILE-18-02-21-C/standard-
unit-rates/
4
https://api.octopus.energy/v1/products/AGILE-
OUTGOING-19-05-13/electricity-tariffs/E-1R-AGILE-
OUTGOING-19-05-13-C/standard-unit-rates/
5
https://carbonintensity.org.uk/
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
776
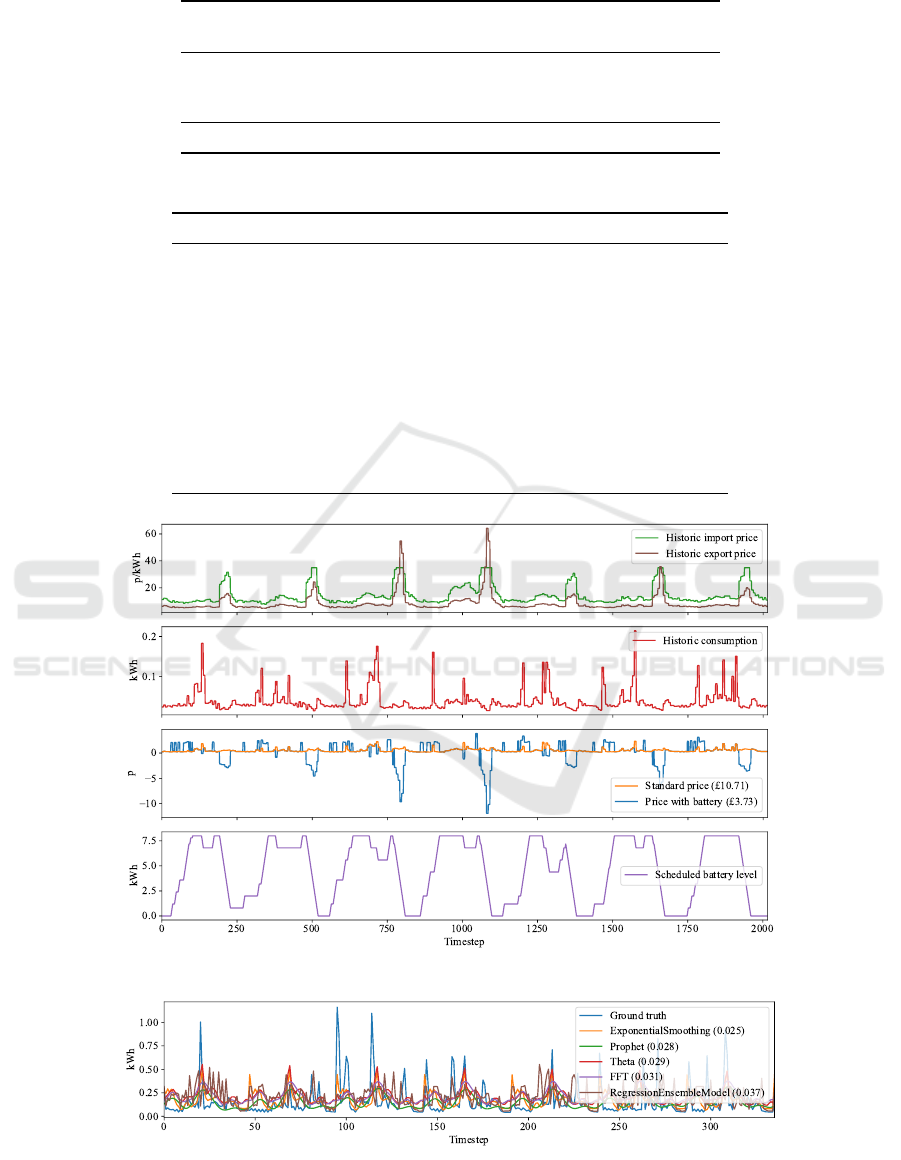
Table 1: Consumption and price forecasts for Example 1.
t U(t) P
I
(t) P
E
(t) U(t)
+
P
I
(t)
+U(t)
−
P
E
(t)
C
∗
(t)
1 2.96 kWh 20.83p/kWh 15.64p/kWh 61.66p 14.79
2 −0.23 kWh 22.68p/kWh 18.35p/kWh −5.22p −45.51
3 0.19 kWh 25.62p/kWh 20.29p/kWh 4.87p −41.8
Σ 2.92 kWh 69.13p/kWh 54.28p/kWh 61.31p −72.52
Table 2: Applicable battery schedules for Example 1.
i π
i
∀t ∈ D,C(s
t
i
,t, π
t
i
) V (s
1
,1,π
i
) Price
1 (−1, 0, −1) (0.0, 40.29, 0.0) 40.29 −32.22p
2 (−1, −1, 0) (0.0, 0.0, 46.67) 46.67 −25.85p
3 (0, −1, −1) (46.87, 0.0, 0.0) 46.87 −25.65p
4 (−1, 0, 0) (0.0, 40.29, 46.67) 86.96 14.44p
5 (0, 0, −1) (46.87, 40.29, 0.0) 87.16 14.64p
6 (−1, 1, −1) (0.0, 91.32, 0.0) 91.32 18.81p
7 (0, −1, 0) (46.87, 0.0, 46.67) 93.53 21.02p
8 (−1, −1, 1) (0.0, 0.0, 104.31) 104.31 31.79p
9 (0, 0, 0) (46.87, 40.29, 46.67) 133.82 61.31p
10 (−1, 1, 0) (0.0, 91.32, 46.67) 137.99 65.47p
11 (−1, 0, 1) (0.0, 40.29, 104.31) 144.6 72.09p
12 (0, −1, 1) (46.87, 0.0, 104.31) 151.18 78.66p
Figure 1: Battery scheduling problem and optimal solution for Example 2.
Figure 2: Consumption predictions for Example 4 with MSE in brackets.
A Smart Home Testbed for Evaluating XAI with Non-experts
777
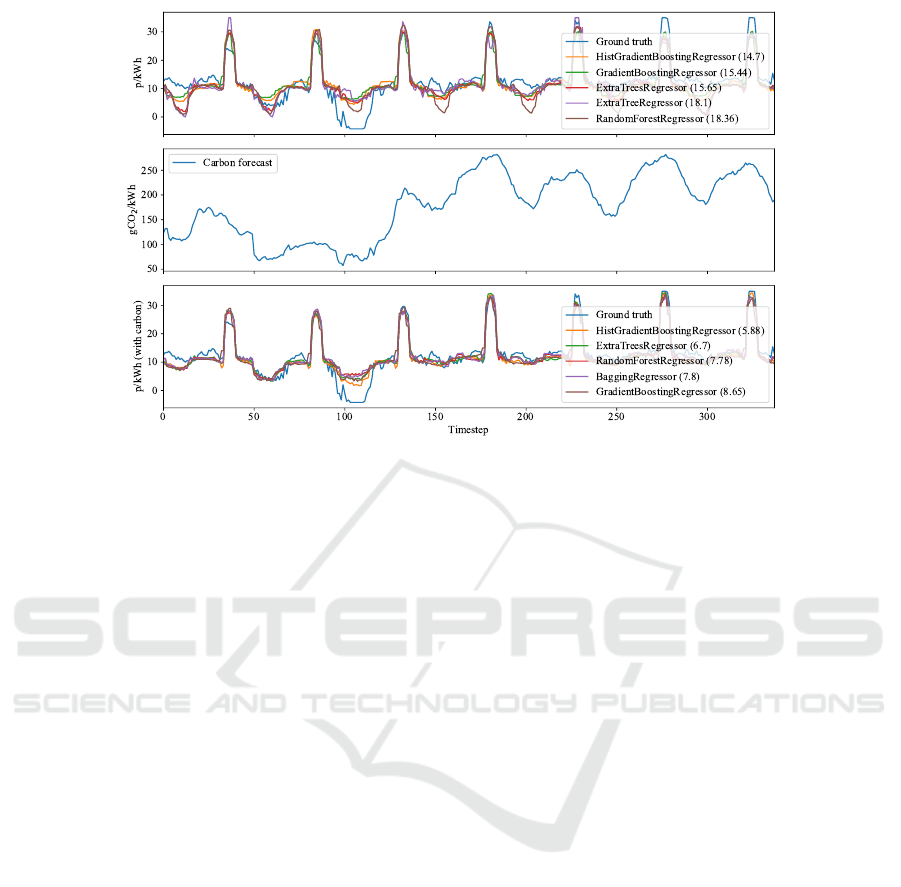
Figure 3: Import price predictions for Example 3 with MSE in brackets.
features to encode time (month, day, day-of-week,
hour, and minute). The first plot in Figure 3 shows the
top performing regressors according to mean squared
error (MSE), with Histogram-based Gradient Boost-
ing Regression Tree achieving best performance. The
second plot then shows carbon forecast data for the
same period. Finally, the third plot shows improved
results where carbon forecast is included as an addi-
tional feature, with the best performing regressor see-
ing a reduction in MSE from 14.7 to 5.88.
3.1.3 Predicting Electricity Consumption
The simple approach described in Section 3.1.2 can
produce reasonable predictions in many cases. How-
ever, there are also techniques designed specifically
for time series data, known as time series forecast-
ing (Hyndman and Athanasopoulos, 2018). Suitable
models can thus be learned in practice using dedicated
tools for time series forecasting such as Darts (Herzen
et al., 2021) or sktime (L
¨
oning et al., 2019). These
techniques are typically better than general-purpose
machine learning techniques at handling time-related
patterns such as seasonality, which may be impor-
tant if/when additional features are not readily avail-
able (as may be the case for predicting domestic elec-
tricity consumption). Nonetheless, many time series
forecasting techniques also support inclusion of addi-
tional features (called multivariate time series).
Example 4. Figure 2 shows consumption predictions
using standard regressors from Darts. Models were
trained on author-collected consumption data for the
period from 10 February 2021 to 25 July 2021, inclu-
sive, with the final 7 days (336 timesteps) reserved for
validation. The only two features are timestamps and
consumption. Unless stated otherwise, seasonality is
set as 1-day (48 timesteps) for all applicable models.
The plot in Figure 2 shows the top performing regres-
sors according to MSE, with Exponential Smoothing
achieving best performance. Note that the ensemble
model is based on a random forest over two Naive
Seasonal models (using 1-day and 7-day seasonality).
3.2 Smart TRV
Smart home heating systems are a major category in
the smart home domain (Guo et al., 2019). Success-
ful commercial products include the ecobee range and
the previously mentioned Nest Learning Thermostat.
The AI literature has also seen many relevant appli-
cations (e.g. Rogers et al., 2013; Yang and Newman,
2013; Shann et al., 2017). Typical AI-based features
include the optimisation of heating controls according
to some criteria (e.g. comfort, cost, carbon emissions)
and the ability to automatically learn a heating sched-
ule. Perhaps the most high-profile class of applica-
tion is smart thermostats, which connect directly to
a main heating system (e.g. boiler) and provide cen-
tralised control. Another class of application is smart
TRVs, which connect to a radiator and are limited
to localised (e.g. room-level) control. The same AI-
based features are applicable in either case.
We now introduce our second application, which
is centred on scheduling a smart TRV to optimise
comfort with respect to a learned heating schedule,
similar to the above applications. Smart TRVs are
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
778

Figure 4: Sample page from user interface.
chosen as a low-cost alternative to smart thermostats
that are easier to install in homes for short-term evalu-
ations. Nonetheless, the application can easily extend
to the use of smart thermostats when practical. Again
the control schedule is defined for some fixed period
into the future (e.g. one week). Obvious issues in-
clude the building of a realistic thermal model and the
need to automatically elicit user heating preferences.
Generating the heating schedule presents avenues for
the use of machine learning, while optimal schedul-
ing of TRV actions presents avenues for the use of AI
planning. The application is a hybrid-AI system. Tar-
get XAI stakeholders are non-experts occupying the
home, with explainable AI planning needed to explain
the control schedule, and explainable machine learn-
ing needed to explain the learned heating schedule.
3.2.1 Scheduling TRV Control
Again we start by formalising the high-level AI plan-
ning problem as follows:
Definition 3. A TRV scheduling problem is a tuple
(τ,x
1
,y
1
,σ, ω,λ,∆,t
max
,H) where:
• τ ∈ R
≥5
is the (constant) boiler temperature in °C
• x
1
∈ [5, τ] the (current) radiator temperature in °C
• y
1
∈ R is the (current) room temperature in °C
• σ ∈ R
≥0
is the BTU–50 gain in BTU/h
• ω ∈ R
≥0
is the BTU loss in BTU/h
• λ ∈ R
>0
is the BTU effort in BTU/h
• ∆ ∈ R
>0
is the number of timesteps per hour
• t
max
∈ N is the horizon with D = {1,2,.. .,t
max
}
• H : {t + 1 | t ∈ D} → R is the heating schedule
Definition 3 introduces parameters for our ther-
mal model, including properties of the heating system
and current environment. The heating schedule is de-
fined for t = t
max
+ 1 but is undefined for t = 1. Note
that BTU (British Thermal Unit) is a standard unit of
heat. The BTU–50 gain for a radiator is determined
by σ = e · a where e ∈ [0,1] is the radiator efficiency
A Smart Home Testbed for Evaluating XAI with Non-experts
779
and a ∈ R
≥0
is the radiator panel area in cm
2
. Stan-
dard efficiencies are: e = 0.55 for type 11 radiators
(single panel with no fins), e = 0.77 for type 21 ra-
diators (single panel with fins), and e = 1 for type
22 radiators (double panel with fins). For example,
a type 11 radiator with a panel area of 3500 cm
2
has
a BTU–50 gain of σ = 3500 · 0.55 = 1925 BTU. As
in Definition 1 we assume that timesteps map to con-
secutive fixed-length time intervals, although interval
length is now explicitly encoded by ∆. For example,
if ∆ = 12 then timesteps map to 5-minute intervals.
Definition 4. Let (τ,x
1
,y
1
,σ, ω,λ,∆,t
max
,H) be a
TRV scheduling problem. A TRV scheduling model
is an MDP (S,A, T,C,t
max
,s
1
) where:
• S = R
2
is the set of states with (x,y) ∈ S such that
x is the radiator temperature and y is the room
temperature
• A = {0,1} is the set of (TRV) actions with 1 the
valve open action and 0 the valve closed action
• T : S ×A → S is the transition function defined for
each s ∈ S and each a ∈ A as:
x
0
= min{τ,max{5, x
00
}} (8)
x
00
=
(
x +
12(τ−x)
∆
if a = 1
max{y
0
,x +
4(y−τ)
∆
} if a = 0
(9)
y
0
= y +
(a · σ · β) − ω
λ · ∆
(10)
β = 0.000112378 · z
2
+ 0.0143811 · z (11)
where s = (x,y), z = x − y, and T (s,a) = (x
0
,y
0
)
• C : S × D → R
≥0
is the cost function defined for
each s ∈ S and each t ∈ D as:
C(s,t, a,s
0
) = |y
0
− H(t + 1)| (12)
where s
0
= (x
0
,y
0
)
• t
max
∈ N is the horizon with D = {1,2,.. .,t
max
}
• s
1
∈ S is the initial state with s
1
= (x
1
,y
1
)
Equations 8–11 define a simple building thermal
model (Bacher and Madsen, 2011) similar to Rogers
et al. (2011, 2013). We can summarise the model as
follows. Equation 9 says that when the TRV is open
the radiator takes 5 minutes (
12
/∆) to reach boiler tem-
perature, and when the TRV is closed takes 15 min-
utes (
4
/∆) to reach room temperature. Equation 8 en-
sures that radiator temperature is bounded by [5,τ].
Equation 11 is a standard calculation of radiator BTU
with respect to room temperature. Equation 10 de-
fines the change in room temperature with respect to
radiator BTU gain and room heat loss. For cost func-
tion C, Equation 12 defines cost at timestep t ∈ D as
the absolute deviation at t between the expected room
temperature and heating schedule. Therefore, C is
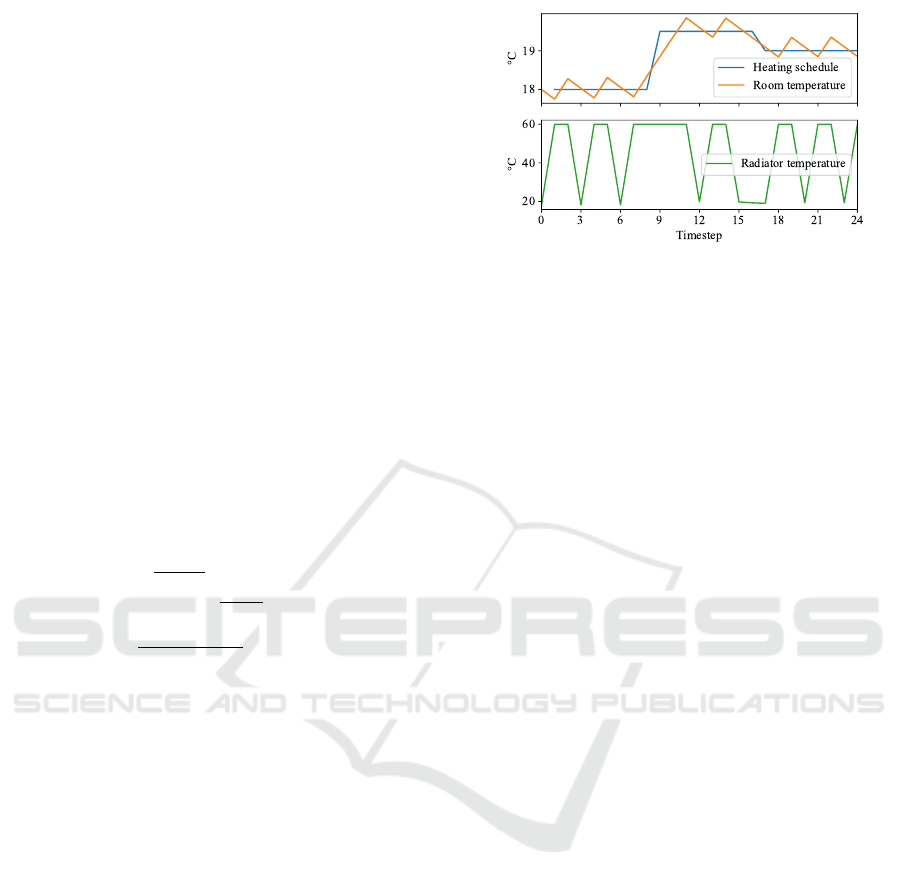
Figure 5: TRV problem and optimal solution for Example 5.
guaranteed to be non-negative. Note that Equation 1
can be adapted to this setting by replacing C(s,a) with
C(s,t, a,s
0
). An (optimal) TRV schedule is an (opti-
mal) partial policy that is closed with respect to s
1
∈ S.
Example 5. Let τ = 60 °C, x
1
= y
1
= 18 °C, σ = 1925
BTU/h, ω = λ = 500 BTU/h, ∆ = 4, t
max
= 24, i.e.
timesteps map to 15-minute intervals and a period of
6 hours. Figure 5 then shows a heating schedule H
with expected room (resp. radiator) temperature while
executing the optimal TRV schedule shown in the first
(resp. second) plot, i.e. the TRV is open (resp. closed)
when the radiator temperature is increasing (resp. de-
creasing) or at boiler (resp. room) temperature.
TRV scheduling problems exhibit similar proper-
ties as battery scheduling problems: they cannot be
expressed (compactly) in standard AI planning lan-
guages, but non-negative costs mean they can still be
solved by standard search algorithms. The main dif-
ference for state-space search is that TRV scheduling
problems exhibit a much larger set of reachable states
due to more complex dynamics. In practice, unin-
formed search algorithms such as uniform cost search
can still find solutions, but in order to scale to larger
decision horizons more advanced heuristic search al-
gorithms may be required. This highlights the need
for a broad range of explainable AI planning meth-
ods, e.g. uninformed strategies may be more intuitive
(and thus easier to explain) than heuristic strategies.
3.2.2 Learning Heating Preferences
Several commercial products use machine learning to
learn heating preferences (setpoint schedules), such as
the Auto-Schedule feature of the Nest Learning Ther-
mostat or the eco+ feature of the ecobee range, yet
the actual methods in use remain trade secrets (Bar-
rett and Linder, 2015). To the best of our knowledge,
the problem has not received much attention in the AI
literature, although there are some examples (e.g. Bao
and Chung, 2018). Unlike the machine learning prob-
lems described in Sections 3.1.2 and 3.1.3, learning
a user heating schedule H does not exhibit a crisply
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
780

defined scope or range of applicable machine learn-
ing techniques. Conceptually, the problem can be
conceived as an instance of a broader problem that
we refer to as learning from expert input. Essen-
tially the learned schedule represents a model of the
user’s heating preferences, with manual setpoint ad-
justments implying that the current model should be
revised, and an absence of manual adjustments im-
plying support for the current model. Initially the
system may rely entirely on manual adjustments (e.g.
the Nest begins to adopt learned setpoints from day
two)
6
but over time should require fewer manual ad-
justments as more data is acquired. However, research
studies have found users unsatisfied with schedules
learned by existing commercial systems (Yang and
Newman, 2013), which highlights the difficulties in
inferring user preferences from limited data.
The general problem of learning from expert input
can be solved by a potentially vast range of machine
learning techniques. Perhaps most relevant is a topic
that Russell and Norvig (2020, Chapter 22) refer to
as apprenticeship learning. This topic is said to in-
clude both imitation learning (Hussein et al., 2017)
and inverse reinforcement learning (Arora and Doshi,
2021). While reinforcement learning seeks to learn
a good policy (mapping states to actions) given ob-
served rewards, inverse reinforcement learning seeks
to learn a reward function given observed state-action
pairs. Conversely, imitation learning uses supervised
learning on observed state-action pairs in order to (di-
rectly) learn a policy that mimics observed behaviour.
In practice inverse reinforcement learning may be
more robust than imitation learning, since it learns ex-
pert preferences explicitly, but we speculate that com-
mercial smart thermostats in fact use imitation learn-
ing to learn user heating schedules. There are no com-
prehensive software libraries for apprenticeship learn-
ing akin to Scikit-learn or Darts, but collected imple-
mentations of selected methods are available.
7
4 TESTBED
This section describes technical details relevant to de-
ployment of our testbed (referred to here as CHApp).
4.1 Software Architecture
Figure 6 provides an overview of the software archi-
tecture, which is comprised of five components. The
first (chapp-ui) is a web-based user interface imple-
6
https://support.google.com/googlenest/answer/
9247510
7
https://github.com/HumanCompatibleAI/imitation
chapp-api
Python
Falcon
Bjoern
chapp-service
Python
Schedule
Scikit-learn
Darts
chapp-ui
HTML
CSS (Flexbox)
JavaScript
Chart.js
SQLite
chapp-setup
Debian
Bash
Nginx
HTTP
Python
Browser
Python
Figure 6: Software architecture.
mented using standard web languages (HTML, CSS,
JavaScript) with the CSS Flexible Box Layout used
for compatibility on mobile devices (responsive web
design) and the Chart.js library used for dynamic data
visualisation. The second is an SQLite database used
for data persistence, storing all relevant data (e.g.
prices, consumption, predictions, schedules). The
third (chapp-api) is a JSON-based web API that ex-
poses data to the web interface and is implemented
in Python using the Falcon and Bjoern libraries. The
fourth (chapp-service) is a software service that is re-
sponsible for maintaining the database and providing
all AI functionality; it is implemented in Python using
the previously mentioned Scikit-learn and Darts li-
braries with the Schedule library used to execute reg-
ular tasks (e.g. data updates, model updates). The fifth
(chapp-setup) is a deployment script implemented in
Bash that automatically installs and configures the
testbed on any recent Debian-based operating system,
with the Nginx web server used for hosting the web
interface. The database will typically run on the same
machine as both chapp-service and chapp-api, but
chapp-ui may run on a separate machine. In practice
there may be two instances of chapp-{service, api},
one for each application (e.g. chapp-battery, chapp-
trv). All software can be accessed via chapp-setup.
8
4.2 Hardware
Baseline deployment of the smart home battery ap-
plication requires installation of a single embedded
computer (to run the testbed software) and a single
smart plug (to capture electricity consumption data).
Suitable embedded computers include the Nvidia Jet-
son Nano and the Raspberry Pi. A popular smart plug
is the Eve Energy, although it currently has no avail-
able API to access consumption data. Possible alter-
natives include the Meross range, which has an un-
official API.
9
Deployment can easily scale to the in-
stallation of multiple smart plugs, e.g. Meross data is
accessed via a centralised web service for all plugs
8
https://github.com/kevinmcareavey/chapp-setup
9
https://github.com/albertogeniola/MerossIot
A Smart Home Testbed for Evaluating XAI with Non-experts
781

registered to a given user account. If feasible, smart
meters of course provide a more accurate measure of
total home electricity consumption, and data can usu-
ally be accessed in a similar manner though official or
unofficial APIs. Examples of smart home batteries in-
clude the previously mentioned Tesla Powerwall and
Powervault 3 range.
Baseline deployment of the smart TRV applica-
tion requires installation of a single embedded com-
puter (again to run the testbed software), a single
smart TRV (to physically open/close the valve and to
measure radiator temperature), and a single tempera-
ture sensor (to measure room temperature). Note that
consumer smart TRVs typically include an on-board
sensor to measure room temperature but proximity
to the radiator may lead to unreliable measurements.
Suitable TRVs include the Netatmo Smart Radiator
Valve and the Lightwave Smart Radiator Valve. Suit-
able temperature sensors include the Netatmo Smart
Indoor Module and the Bosch BME680. Netatmo
provides a unified API,
10
while separate APIs are
available for Lightwave
11
and Bosch
12
devices. As
mentioned previously, the smart TRV may be re-
placed by a smart thermostat when practical.
4.3 User Interface
The web-based user interface is the primary means
by which end-users interact with the testbed. Figure 4
provides a screenshot of a single page from chapp-
ui. The page is comprised of several charts covering a
period of ±7 days relative to the current time, includ-
ing both historic data and future projections. The first
three charts show electricity prices, smart plug energy
consumption, and simulated battery levels, respec-
tively, while the fourth chart shows electricity costs
with and without use of the battery. All charts are dy-
namic; they automatically update when new data is
available, and are customisable by end-users (e.g. to
focus on import prices by hiding export prices).
The user interface component is crucial to XAI
in that it must implement any user-facing aspects of
XAI features. Researchers must therefore adapt this
component in order to support any new XAI tools and
methods under evaluation. The software architecture
described in Section 4.1 is intended to ease this pro-
cess. For example, chapp-api provides a standard API
to access data, which means that e.g. chapp-ui can be
replaced by an alternative web interface without the
need to integrate with (or understand) the underlying
10
https://dev.netatmo.com/apidocumentation
11
https://support.lightwaverf.com/hc/en-us/articles/
360020665652-Link-Plus-Smart-Series-API-
12
https://circuitpython.readthedocs.io/projects/bme680
database. For some research studies a dedicated mo-
bile app may be preferable, in which case the app can
integrate with the testbed via chapp-api as usual.
5 RELATED WORK
Most similar to our applications are three strands
of research involving the University of Southampton
and University of Zurich. The first strand consid-
ers smart thermostats that learn a building thermal
model (Rogers et al., 2011, 2013). The second consid-
ers smart thermostats that balance trade-offs between
comfort and electricity costs (Shann and Seuken,
2013, 2014; Alan et al., 2016b; Shann et al., 2017).
The third considers software agents that monitor elec-
tricity consumption and subsequently help users to se-
lect among daily electricity tariffs (Alan et al., 2014,
2015, 2016a). Obvious similarities include the use of
a thermal model for heating control (Section 3.2.1),
optimising electricity costs (Section 3.1.1), and pre-
dicting electricity consumption (Section 3.1.3). These
similarities are by design; we have sought to develop a
general XAI testbed that mimics functionality and AI
technology that non-experts are likely to encounter.
Despite these similarities, however, there are also sev-
eral key differences. Firstly, we do not assume that
heating systems are powered by electricity. Although
the situation varies greatly across Europe, 87% of
homes in the UK are currently powered by gas com-
pared to 7% by electricity.
13
Secondly, and as a con-
sequence of the first, we do not attempt to optimise
energy costs during heating control. Gas tariffs are
typically fixed for customers, so the idea of optimis-
ing energy costs is less applicable. We do however
incorporate the idea of optimising electricity costs by
the introduction of a smart home battery.
6 CONCLUSION
In this paper we have proposed a general smart home
testbed intended to support research studies evaluat-
ing XAI with non-experts. The testbed is represen-
tative of leading smart home applications, supports a
range of AI tools in a modular fashion, and can be
easily deployed with the provided software architec-
ture using inexpensive consumer hardware. There are
several aspects in which the two testbed applications
as defined could be further extended:
13
https://www.statista.com/statistics/426988/united-
kingdom-uk-heating-methods/
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
782

Improved Dynamics: The AI planning models can
be easily adapted to support more realistic dynam-
ics. For the smart home battery, these might in-
clude asymmetric charge/discharge rates or a de-
cline in battery efficiency at certain levels (e.g.
above 85% and below 15% capacity). For the
smart TRV, these might include the impact of ex-
ternal temperature and weather conditions. Un-
certainty in dynamics can be dealt with in the
standard way (e.g. by replacing the determinis-
tic transition function with a stochastic transition
function), although this will lead to the setting
of planning under uncertainty. In the latter case,
schedules can be found using e.g. determinisa-
tion (Little and Thi
´
ebaux, 2007) or conformant
planning (Domshlak and Hoffmann, 2006).
Learned Dynamics: Dynamics of a real smart home
battery or heating system can be easily learned
as a stochastic transition function and then in-
crementally improved online based on real-world
performance, although the above considerations
apply in regards to planning under uncertainty.
Improved Learning: Section 3.1.2, Section 3.1.3,
and Section 3.2.2 demonstrate a range of applica-
ble machine learning techniques but there is scope
to improve the performance of machine learning
components, including via model optimisations,
alternative models, and additional data sources.
For the purpose of XAI research, however, perfor-
mance remains a secondary objective, and models
should be chosen with primary consideration to
the types of XAI under evaluation.
Our testbed will form the basis of a research study
scheduled for 2023 with prior end-user testing sched-
uled for 2022. The study will evaluate XAI with non-
experts as part of a broader study on the impact of AI
threats (Pitropakis et al., 2019); XAI is regarded here
as an important tool in enabling non-experts to detect
AI threats. The study will involve 20 homes selected
from the social housing sector in England, with par-
ticipants expected to cover a broad demographic.
ACKNOWLEDGEMENTS
This work received funding from the EPSRC CHAI
project (EP/T026820/1). The authors thank Hsueh-Ju
Chen for advice on smart TRV hardware, and Ryan
McConville for advice on machine learning aspects.
REFERENCES
Abdul, A., Vermeulen, J., Wang, D., Lim, B. Y., and
Kankanhalli, M. (2018). Trends and trajectories for
explainable, accountable and intelligible systems: An
HCI research agenda. In Proceedings of the 2018
Conference on Human Factors in Computing Systems
(CHI’18), pages 1–18.
Adadi, A. and Berrada, M. (2018). Peeking inside the
black-box: a survey on explainable artificial intelli-
gence (XAI). IEEE Access, 6:52138–52160.
Alan, A., Costanza, E., Fischer, J., Ramchurn, S., Rod-
den, T., and Jennings, N. R. (2014). A field study of
human-agent interaction for electricity tariff switch-
ing. In Proceedings of the 13th International Confer-
ence on Autonomous Agents and Multiagent Systems
(AAMAS’14), pages 965–972.
Alan, A. T., Costanza, E., Ramchurn, S. D., Fischer, J.,
Rodden, T., and Jennings, N. R. (2016a). Tariff agent:
interacting with a future smart energy system at home.
ACM Transactions on Computer-Human Interaction,
23(4):1–28.
Alan, A. T., Ramchurn, S. D., Rodden, T., Costanza, E.,
Fischer, J., and Jennings, N. R. (2015). Managing en-
ergy tariffs with agents: a field study of a future smart
energy system at home. In Adjunct Proceedings of the
2015 ACM International Joint Conference on Perva-
sive and Ubiquitous Computing and Proceedings of
the 2015 ACM International Symposium on Wearable
Computers (UbiComp-ISWC’15), pages 1551–1558.
Alan, A. T., Shann, M., Costanza, E., Ramchurn, S. D., and
Seuken, S. (2016b). It is too hot: An in-situ study of
three designs for heating. In Proceedings of the 2016
Conference on Human Factors in Computing Systems
(CHI’16), pages 5262–5273.
Anjomshoae, S., Najjar, A., Calvaresi, D., and Fr
¨
amling,
K. (2019). Explainable agents and robots: Results
from a systematic literature review. In Proceedings
of the 18th International Conference on Autonomous
Agents and Multiagent Systems (AAMAS’19), pages
1078–1088.
Arora, S. and Doshi, P. (2021). A survey of inverse
reinforcement learning: Challenges, methods and
progress. Artificial Intelligence, 297:103500.
Arrieta, A. B. et al. (2020). Explainable artificial intel-
ligence (XAI): Concepts, taxonomies, opportunities
and challenges toward responsible AI. Information
Fusion, 58:82–115.
Bacher, P. and Madsen, H. (2011). Identifying suitable
models for the heat dynamics of buildings. Energy
and Buildings, 43(7):1511–1522.
Bao, N. and Chung, S.-T. (2018). A rule-based smart ther-
mostat. In Proceedings of the 2018 International Con-
ference on Computational Intelligence and Intelligent
Systems (CIIS’18), pages 20–25.
Barrett, E. and Linder, S. (2015). Autonomous HVAC con-
trol, a reinforcement learning approach. In Proceed-
ings of the European Conference on Machine Learn-
ing and Principles and Practice of Knowledge Discov-
ery in Databases (ECML-PKDD’15), pages 3–19.
A Smart Home Testbed for Evaluating XAI with Non-experts
783

Biran, O. and Cotton, C. (2017). Explanation and justifica-
tion in machine learning: A survey. In Proceedings of
the IJCAI’17 Workshop on Explainable Artificial In-
telligence (XAI’17), pages 8–13.
Chakraborti, T., Sreedharan, S., and Kambhampati, S.
(2020). The emerging landscape of explainable auto-
mated planning & decision making. In Proceedings of
the 29th International Joint Conference on Artificial
Intelligence (IJCAI’20), pages 4803–4811.
Cheng, H.-F. et al. (2019). Explaining decision-making
algorithms through UI: Strategies to help non-expert
stakeholders. In Proceedings of the 2019 CHI Con-
ference on Human Factors in Computing Systems
(CHI’19), pages 1–12.
Domshlak, C. and Hoffmann, J. (2006). Fast probabilistic
planning through weighted model counting. In Pro-
ceedings of the 16th International Conference on Au-
tomated Planning and Scheduling (ICAPS’06), pages
243–252.
Geffner, H. and Bonet, B. (2013). A Concise Introduction to
Models and Methods for Automated Planning. Mor-
gan & Claypool Publishers.
Guo, X., Shen, Z., Zhang, Y., and Wu, T. (2019). Review
on the application of artificial intelligence in smart
homes. Smart Cities, 2(3):402–420.
Herzen, J. et al. (2021). Darts: User-friendly modern ma-
chine learning for time series. arXiv:2110.03224.
Hoffman, R. R., Mueller, S. T., Klein, G., and Litman, J.
(2018). Metrics for explainable AI: Challenges and
prospects. arXiv:1812.04608.
Hussein, A., Gaber, M. M., Elyan, E., and Jayne, C. (2017).
Imitation learning: A survey of learning methods.
ACM Computing Surveys, 50(2):21.
Hyndman, R. J. and Athanasopoulos, G. (2018). Forecast-
ing: principles and practice. OTexts, 2nd edition.
Kraus, S. et al. (2020). AI for explaining decisions in multi-
agent environments. In Proceedings of the AAAI Con-
ference on Artificial Intelligence (AAAI’20), pages
13534–13538.
Langer, M. et al. (2021). What do we want from explain-
able artificial intelligence (XAI)?–a stakeholder per-
spective on XAI and a conceptual model guiding in-
terdisciplinary XAI research. Artificial Intelligence,
296:103473.
Lipton, Z. C. (2018). The mythos of model interpretability:
In machine learning, the concept of interpretability is
both important and slippery. ACM Queue, 16(3):31–
57.
Little, I. and Thi
´
ebaux, S. (2007). Probabilistic planning vs.
replanning. In Proceedings of the ICAPS Workshop on
Planning Competitions: Past, Present, and Future.
L
¨
oning, M., Bagnall, A., Ganesh, S., Kazakov, V., Lines, J.,
and Kir
´
aly, F. J. (2019). sktime: A unified interface
for machine learning with time series. In Proceed-
ings of the NeurIPS Workshop on Systems for Machine
Learning.
Mekuria, D. N., Sernani, P., Falcionelli, N., and Dragoni,
A. F. (2019). Smart home reasoning systems: a sys-
tematic literature review. Journal of Ambient Intelli-
gence and Humanized Computing, pages 1–18.
Miller, T. (2019). Explanation in artificial intelligence: In-
sights from the social sciences. Artificial Intelligence,
267:1–38.
Pedregosa, F. et al. (2011). Scikit-learn: Machine learning
in Python. Journal of Machine Learning Research,
12:2825–2830.
Pitropakis, N., Panaousis, E., Giannetsos, T., Anastasiadis,
E., and Loukas, G. (2019). A taxonomy and survey of
attacks against machine learning. Computer Science
Review, 34:100199.
Rogers, A., Ghosh, S., Wilcock, R., and Jennings, N. R.
(2013). A scalable low-cost solution to provide per-
sonalised home heating advice to households. In
Proceedings of the 5th ACM Workshop on Embedded
Systems For Energy-Efficient Buildings (BuildSys’13),
pages 1–8.
Rogers, A., Maleki, S., Ghosh, S., and Jennings, N. R.
(2011). Adaptive home heating control through
gaussian process prediction and mathematical pro-
gramming. In Proceedings of the 2nd International
Workshop on Agent Technology for Energy Systems
(ATES’11).
Russell, S. J. and Norvig, P. (2020). Artificial Intelligence:
A Modern Approach. Prentice Hall, 4th edition.
Shann, M., Alan, A., Seuken, S., Costanza, E., and Ram-
churn, S. D. (2017). Save money or feel cozy?: A
field experiment evaluation of a smart thermostat that
learns heating preferences. In Proceedings of the 16th
Conference on Autonomous Agents and Multiagent
Systems (AAMAS’17), pages 1008–1016.
Shann, M. and Seuken, S. (2013). An active learning ap-
proach to home heating in the smart grid. In Proceed-
ings of the 23rd International Joint Conference on Ar-
tificial Intelligence (IJCAI’13), pages 2892–2899.
Shann, M. and Seuken, S. (2014). Adaptive home heat-
ing under weather and price uncertainty using gps and
mdps. In Proceedings of the 13th International Con-
ference on Autonomous Agents and Multiagent Sys-
tems (AAMAS’14), pages 821–828.
Yang, R. and Newman, M. W. (2013). Learning from a
learning thermostat: lessons for intelligent systems for
the home. In Proceedings of the 2013 ACM Interna-
tional Joint Conference on Pervasive and Ubiquitous
Computing (UbiComp’13), pages 93–102.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
784
