
Towards Model-driven Fuzzification of Adaptive Systems Specification
Tomáš Bureš
a
, Petr Hn
ˇ
etynka
b
, Martin Kruliš
c
and Jan Pacovský
d
Charles University, Faculty of Mathematics and Physics, Prague, Czech Republic
Keywords:
Adaptive Systems, Fuzzification, Machine Learning, Model-driven, Meta-models.
Abstract:
The position paper outlines a method transforming adaptation rules in a self-adaptive system to a machine
learning problem using neural networks. This makes it possible to endow a self-adaptive system with the
possibility to learn. At the same time, by controlling the degree to which this transformation is done, one can
scale the tradeoff between learning capacity and uncertainty in the self-adaptive system. The paper elaborates
this process as a model transformation pipeline. The pipeline starts with a model capturing the strict adaptation
rules. Then it is followed by multiple steps in which the strict rules are gradually fuzzified by well-defined
transformations. The last model transformation in the pipeline transforms the fuzzified rules to a neural network
that can be trained using the traditional stochastic gradient descent method. We briefly showcase this using two
examples from the area of collective adaptive systems.
1 INTRODUCTION
Nowadays, smart self-adaptive systems can be found
in almost all application domains — e.g., smart build-
ing management (smart heating, ventilation, physical
access control, etc.), smart cities (traffic management),
emergency systems, smart agriculture, and production
management in Industry 4.0, to name just a few. In all
these systems, applications are composed of a rather
large number of components that cooperate on a com-
mon goal.
Cooperation among a group of components is typi-
cally specified via collaboration and adaptation rules.
These rules are domain- and application-specific and
are expressed as hard and soft constraints. Recent ap-
proaches to these systems started experimenting with
employing neural networks to better deal with situa-
tions that are not fully expected.
However, a discrete step from logical rules to neu-
ral networks typically means that one cannot easily
prescribe (at least some) behavior using rules, rather
everything has to be trained — this is because neural
networks work as a black-box.
Motivating this from the perspective of our re-
search, we have been quite successful in employing
the concept of autonomic component ensembles to de-
a
https://orcid.org/0000-0003-3622-9918
b
https://orcid.org/0000-0002-1008-6886
c
https://orcid.org/0000-0002-0985-8949
d
https://orcid.org/0000-0002-3895-7962
scribe group cooperation. An ensemble (Bures et al.,
2020) defines several conditions that are constraints
(temporal, spatial, and other) under which a group
(i.e., an instance of the ensemble) of components is
established. Evaluation of ensembles is continuous
and thus the groups of components are dynamic and
may overlap (a single component can be a member of
several ensemble instances at the same time). To find
an assignment of components to ensemble instances, a
constraint solver is employed.
Over the years, we have benefited from the con-
cept of ensembles in a number of projects from mul-
tiple different domains (IoT, smart farming, Industry
4.0). However, we have encountered two issues that
are pushing us to machine learning (using neural net-
works). First, we have to increasingly deal with uncer-
tainty in systems that the pre-defined rules are not fully
fit to handle. Second, for large systems with a high
number of components, the exponential complexity of
evaluating the rules using a constraint solver becomes
a problem (which is further aggravated by the need to
evaluate ensembles continuously at runtime).
Moving towards the neural network approach, we
reformulated the problem of ensemble evaluation from
a constrain solving one to classification one and em-
ploy machine learning using neural networks. Our
initial experiments (Bureš et al., 2020) in this direction
are rather promising.
A big pitfall of this solution, when done trivially,
is that the abstractions used by the neural network
336
Bureš, T., Hn
ˇ
etynka, P., Kruliš, M. and Pacovský, J.
Towards Model-driven Fuzzification of Adaptive Systems Specification.
DOI: 10.5220/0010910800003119
In Proceedings of the 10th International Conference on Model-Driven Engineering and Software Development (MODELSWARD 2022), pages 336-343
ISBN: 978-989-758-550-0; ISSN: 2184-4348
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
are too different to the traditional logical rules. Many
practitioners thus typically opt to drop the natural un-
derstanding of the system (which is inherent when
using logical rules) and go for a black-box approach
represented by the neural network.
In our work, we advocate a compromise that brings
the better of both approaches: it preserves some level
of natural understanding of the system (which comes
from the logical rules) and it can learn to better deal
with not fully expected situations (which comes from
the neural network).
We outline this approach in this paper. The ap-
proach is model-based — it relies on a gradual transfor-
mation of models that capture the logical rules govern-
ing the operation of the system. Each step corresponds
to the fuzzification of the logical rules, gradually mov-
ing the logical rules towards a generic neural network
while keeping a clear relation to the original logical
rules.
The result of each of these model-transformation
steps yields a fully working system. Thus, the ap-
proach we present uses the model-transformation pro-
cess to create a family of systems, which all address
the same goal and only differ in the trade-off between
natural understandability and trainability.
The particular goal of this position paper is to pro-
pose (meta-)models that are used in the approach and
to design the overall approach as a model-driven trans-
formation pipeline.
To achieve the goal, the paper is structured as fol-
lows. Section 2 presents several motivation cases from
different domains. The (meta-)models and model-
driven pipeline are described in Section 3. In Section 4,
we discuss related work and Section 5 concludes the
paper.
2 ENSEMBLES AND
MOTIVATION CASES
As mentioned in the introduction, we are considering
self-adaptive systems that are specified via autonomic
component ensembles. Using this approach, entities
of a system are modeled as components, which are de-
fined by their state (also called a knowledge). From the
point of interactions, a component is passive — i.e., it
does not actively communicate with other components.
The interaction is modeled via ensembles that define
conditions under which particular components are part
of the ensemble. A single component can be in mul-
tiple ensembles at the same time. The ensemble also
prescribes data interchange among components in the
ensemble and also prescribes group-wise tasks (e.g.,
coordinated movement). More details are provided
within the code examples in the rest of this section
where we discuss two motivation cases from two dif-
ferent domains. Both cases are taken from our recent
and ongoing projects with industrial partners.
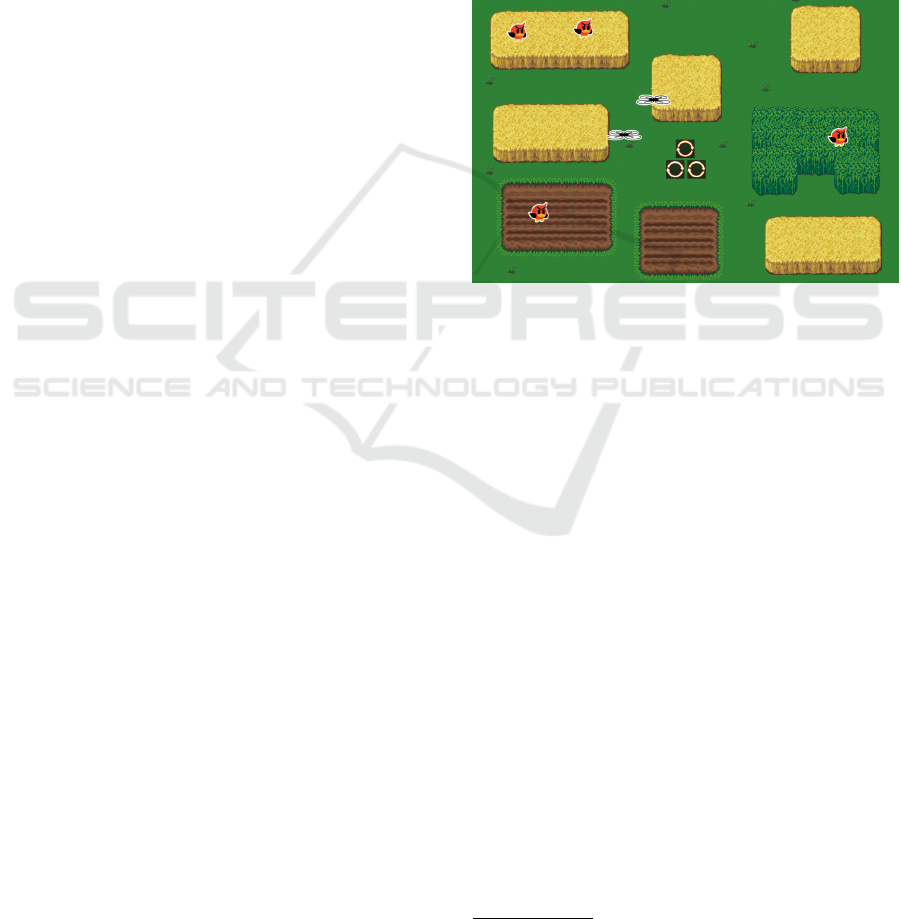
2.1 Case #1 – Smart Farming
As the first motivation case, we are using a simple but
real-life scenario from our ECSEL JU project AFar-
Cloud
1
, which focuses on smart farming. Figure 1
shows the example visualized in our simulator devel-
oped for demonstration of the project results.
Figure 1: Motivation case #1.
In the example, there are several fields with crop
(yellow ones in the figure) that needs protection from
flocks of birds. To drive the birds out of these fields
(to areas that cannot be damaged by the birds — green
and brown fields on the figure), there is a set of drones.
They monitor the farm environment (temperature, hu-
midity, etc.) but also detect the flocks. To effectively
drive the birds out, the drones need to cooperate (a
bigger flock of birds requires more drones) and form
a temporary group. The battery of a drone has only a
limited capacity and thus the drones need to recharge
themselves (the chargers are depicted as rounded ar-
row blocks in the center). However, the charger can
accommodate only a limited number of drones at the
same time.
In the ensemble-based specification, drones, charg-
ers, fields, and even flocks are described as compo-
nents. The flocks are beyond direct control, thus their
state is only observed and not affected by the ensem-
bles. For drone cooperation, there are several ensem-
bles defined — e.g., one for creation of a drone forma-
tion for the field protection, one for charging coordina-
tion, etc. A complete specification of the example in
our DSL for ensembles can be found in (Bureš et al.,
2020).
1
https://www.ecsel.eu/projects/afarcloud
Towards Model-driven Fuzzification of Adaptive Systems Specification
337
Listing 1 shows a high-level specification of a con-
straint defining a condition whether a particular drone
is low on battery and thus switches its operation task
(and can be subsequently selected by an ensemble re-
sponsible for the charger assignment).
1 rule GoToCharger(drone) {
2 condition {
3 drone.energy < ENERGY_TRESHOLD
4 }
5 action {
6 drone.task = GO_TO_CHARGER
7 }
8 }
Listing 1: Charging condition.
Similarly, there is a constraint when the drone is
close to a dangerous flock and thus switches its op-
eration task to driving the flock away — shown in
Listing 2. Here, the condition filters out nearby flocks
(in terms of Euclidean distance as computed in a helper
predicate, which is also included) and then determines
whether at least one such flock exists.
1 rule ScareFlock(drone) {
2 condition {
3 drone.knownFlocks.filter(flock −>
4 distanceLessThan(drone.pos, flock.pos, 10))
5 .size() > 0
6 }
7 action {
8 drone.task = SCARE_FLOCK
9 }
10 }
11
12 pred distanceLessThan(pos1, pos2, dist) {
13 sqrt((pos1.posX − pos2.posX) ^ 2 +
14 (pos1.posY − pos2.posY) ^ 2) < dist
15 }
Listing 2: Flock condition.
Finally, there is a constraint (Listing 3) selecting a
required number of active drones for given phase of
the day. It is based on an observation that the birds
are very active during the morning, somewhat active
during the afternoon, and sleeping during the night (but
at least a single drone is required always to monitor
environment at any given time). Here, the condition is
not specified as the rule is active always.
1 rule activeDrones() {
2 action {
3 activeDrones = switch (hour(NOW)) {
4 case 0..5: 1
5 case 5..11: 10
6 case 11..19: 5
7 case 19..24: 1
8 }
9 }
10 }
Listing 3: Active drones condition.
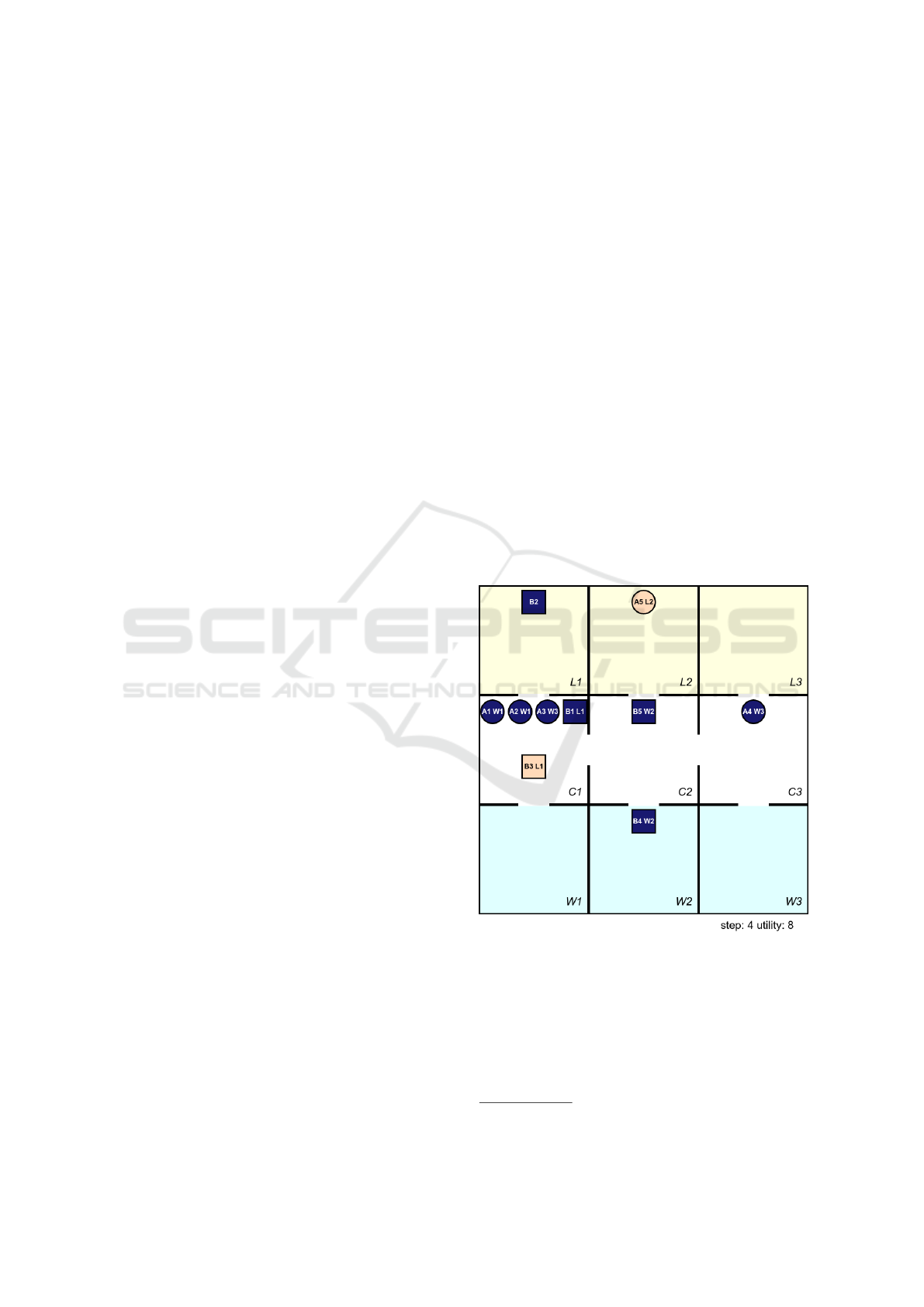
2.2 Case #2 – Access Control in
Industry 4.0
The second case is also a real-life scenario — this
time taken from our international project Trust 4.0.
2
The scenario primarily targets physical access con-
trol within a company. In the company, the workers
work on projects for different customers. Each of these
projects is assigned to a different group of workers (the
groups are disjoint). The reason for such an organi-
zation is protecting of customers intellectual property
and the workers from different teams cannot commu-
nicate and cannot even share the same room (with
exceptions of corridors, bathrooms, etc.). To ensure
these constraints, the workers are controlled in terms,
which rooms they should (or are allowed to) enter.
Figure 2: Motivation case #2.
Figure 2 shows a screenshot from our simulator of
the scenario (for a small number of rooms and work-
ers). In particular there are three working rooms (W1–
W3 at the bottom), three lunch rooms (L1–L3 at the
top), and three corridors in the middle. Circles and
squares represent workers — the shape distinguishes
affinity of the worker to a particular team. Color of the
2
http://trust40.ipd.kit.edu/home/
MODELSWARD 2022 - 10th International Conference on Model-Driven Engineering and Software Development
338

shapes distinguishes mode of the worker (blue for the
working mode and orange for the want-to-eat mode).
Labels within the shape are IDs of the worker and
assigned room.
Since the capacity of the rooms is limited, the even
the workers from different teams need to share rooms.
In such case, the workers can share rooms if their
teams are declared as compatible. The compatibility
of teams is defined explicitly via matrix — e.g., for
four teams (labeled A–D) the matrix can be visualized
as follows (check-mark represents team compatibility).
A predicate for identifying compatibility simply reads
the appropriate value in the matrix.
A B C D
A X X X
B X X X
C X X
D X X X X
Within the constraints of which workers are al-
lowed to meet and which are not, the system controls
the dynamic assignment of rooms such that the needs
of the workers (e.g., to work and to have lunch) are
satisfied.
3 MODEL-DRIVEN
FUZZIFICATION APPROACH
Although the specification in the previous section
works well in fully anticipated situations, the fact that
it has no capacity to learn surfaces quickly when the
level of uncertainty increases.
In this section, we outline how to transform (re-
lying on the model transformation principles) a rule-
based system into a system that has capacity to learn
and that can eventually be implemented using a neural
network.
While we could replace the system with a generic
neural network (e.g., a multi-layer perceptron with sev-
eral hidden layers), we argue that this trivial solution
is too generic and any domain-specific knowledge en-
coded in the original rules would be lost. Instead, we
preserve the domain knowledge coming from the strict
adaptation rules and we transform them into “learnable
rules” that will be directly mappable to the correspond-
ing fragments of a neural network.
We perform this transformation in steps where the
result of each step is a working system with a certain
level of learning capacity. Each step fuzzifies the sys-
tem and increases its learning capacity (by replacing
some predicates with corresponding counterparts with
higher learning capacity).
The transformation can be shown on the condition
of the rule in Listing 1. Here, the less-than operator
and strict value are replaced with a “fuzzy” operator
isNotEnough
(Listing 4), which takes three parameters:
(1) a value to be tested, (2) minimal value, and (3) max-
imal value. After the transformation, the system has
the ability to learn this particular condition.
1 condition {
2 isNotEnough(drone.energy, min=0, max=100)
3 }
Listing 4: Charging condition fuzzified.
The condition can be “fuzzified” further (shown
in Listing 5) and replaced with a generic operator
hasRightValue1D
, which represents a general learn-
able interval. The
capacity
parameter expresses the
learning capacity, which determines the number of
neurons in the hidden layer in the underlying neural
network for training (the higher it is, the more complex
function it can learn).
1 condition {
2 hasRightValue1D(drone.energy,
3 min=0,
4 max=100,
5 capacity=20)
6 }
Listing 5: Charging condition fuzzified — 2
nd
level.
Similarly, the condition in Listing 2 can be up-
dated. Within the first level of fuzzification via the
spatial operator
isCloseEnough
and within the sec-
ond level of fuzzification via the generic operator
hasRightValue2D
, which is shown in Listing 6. It is
the same operator as in the case of
hasRightValue1D
,
but this time for two-dimensional values (tuples).
1 condition {
2 drone.knownFlocks.filter(flock −>
3 hasRigthValue2D[flock.id](drone.pos,
min=(0,0), max=(100,100), capacity=20))
4 .size() > 0
5 }
Listing 6: Charging condition fuzzified — 2
nd
level.
For the drone selection based on time of the day
(Listing 3), the first level of fuzzification is based on
the temporal operator
getValueBasedOnTime
, while
the second level is again via the
hasRightValue1D
op-
erator.
For fuzzification of the condition in the second
motivation case, the operator
isInRelation
with two
parameters is used in the first level of fuzzification
while in the second level, there is the generic operator
hasRightCategories
. The operator takes a fixed-size
vector of categorical values (in this particular case
Towards Model-driven Fuzzification of Adaptive Systems Specification
339

Meta-model
of neural
networks
Meta-model
with fuzzy
condition
Meta-model
with strict
condition
transformation
Neural
networks
specification
transformation
transformation
n-th level
fuzzification
Specification
with strict
conditions
1st level
fuzzification
«instanceOf»
«instanceOf»
«instanceOf»
«instanceOf»
Figure 3: Transformation pipeline.
workers in a room) and it learns which combinations
of values correspond to the true output.
3.1 Model-driven Pipeline
As shown above, we propose a gradual transformation
of an adaptive system specification with logical adap-
tation rules to a specification with trainable rules. The
advantage of such an approach is that the specifica-
tion of logical rules can be created by a domain expert,
which has no knowledge of the neural networks and the
construction of trainable rules, and these are generated
semi-automatically from the logical ones. The core of
the specification (components and ensembles) remains
the same and only the conditions in the ensemble spec-
ifications will be transformed. A modeling tool then
can easily assist developers during transformations,
i.e., it can navigate to conditions within the ensemble
definitions and propose a suitable transformation of
operators based on their operands and context.
Earlier in this section, we have showcased a two-
step transformation, but in general there can be any
number of them. The overall process is illustrated in
Figure 3.
To simplify the development of specifications and
allow for tool-support, we define the whole process
as a model-driven pipeline, where a developer starts
with a model and gradually executes transformations
on it to get a more detailed one that can be further
transformed to an executable specification with neural
networks.
To support these transformations, we have created
a meta-model that is also shown in Figure 3 (the indi-
vidual specifications in the pipeline are models con-
forming to the meta-model). In detail, the meta-model
is described in the following section.
The exact transformation to the neural network (to-
gether with the meta-model of a neural network spec-
ification) is beyond the scope of this paper. Here we
elaborate the model-driven aspect of this approach. In
a nutshell, we transform each fuzzy condition to a frag-
ment of a neural network (e.g., the
hasRightValue1D
and
hasRightValue2D
get turned to an RBF neural net-
work layer
3
). The logical connections are then turned
to arithmetic operations over outputs of the network
corresponding to the operands.
3.2 Meta-model
We have created a single meta-model split into several
packages. Its overall structure is shown in Figure 4.
The core specification concepts that are common to all
our models (i.e., definitions of components and ensem-
bles), are defined in the
Components and Ensembles
package. Then, there are two additional packages that
merge with the core package. The first of them defines
the operators for strict conditions while the second one
defines operators for fuzzy specifications.
Strict conditions
Fuzzy conditions
Component and Ensembles
«merge»
«merge»
Figure 4: Meta-model structure.
Figure 5 shows an excerpt of the core
Components and Ensembles
package. Just to
briefly overview it, there are Components and
Ensembles — both of them can have defined
DataFields. Ensembles can be hierarchically nested
(the sub-ensembles association) and they have rules,
which based on Conditions, select the components to
be in the Ensemble. The Condition is composed of
condition expressions which are either a Predicate
or the Operator expression. The OperatorExpr class
is abstract and its concrete realizations are defined
in particular packages based on the used level of the
specification.
3
https://en.wikipedia.org/wiki/Radial_basis_function_
network
MODELSWARD 2022 - 10th International Conference on Model-Driven Engineering and Software Development
340

«MetaClass»
OperatorExpr
«MetaClass»
ConditionExpr
«MetaClass»
PredicateExpr
«MetaClass»
Condition
«MetaClass»
Rule
«MetaClass»
Ensemble
«MetaClass»
DataField
«MetaClass»
Component
expr
expression
*
selects
*
*
*
*
subensembles
*
Figure 5: Components and Ensembles package.
Figure 6 shows the main part of the
Strict conditions
packages. There are several
defined operator expressions that extend the abstract
OperatorExpr class. The
ScalarThreshold
operator
declares, as its name suggests, a scalar comparison
with a given threshold. It has two arguments (omitted
in the figure to leave it concise) for a value and
threshold and then it has a field for the kind of
comparison (less-than, greater-then, etc.). It is used
for modeling the condition from Listing 1. Similarly,
there is
EuclideanDistanceThreshold
that offers
a comparison of two-dimension values and it has
the same structure as the previous operator. It can
be used for the condition in Listing 2. Next, the
CategoricalSelection
is used for selecting a value
from several possibilities (categories) and it is used in
for modeling conditions in Listing 3 and compatibility
checking in the motivation case #2. Finally, there can
be defined other operators (currently left as future
work).
Component and Ensembles
...other operators...
«MetaClass»
CategoricalSelection
«MetaClass»
EuclideanDistanceThreshold
+kind
«MetaClass»
ScalarThreshold
+kind
«MetaClass»
OperatorExpr
Figure 6: Strict conditions.
Finally, Figure 7 shows the main part of the
Fuzzy conditions
packages. As in the Strict pack-
age, there is a set of operator expressions extend-
ing the abstract OperatorExpr class. The operators
are those already introduced in the examples at the
beginning of this section. Additionally, there is
a direct relation with the strict operators. In par-
ticular, the
IsNotEnough
and
HasRightValue1d
are
fuzzy variants of the
ScalarThreshold
operator. Sim-
ilarly, the
IsCloseEnough
and
HasRightValue2d
cor-
respond to
EuclideanDistanceThreshold
and, finally,
the
IsInRelation
and
HasRightCategories
correspond
to the CategoricalSelection operator.
Component and Ensembles
«MetaClass»
IsInRelation
«MetaClass»
IsCloseEnough
«MetaClass»
IsNotEnough
...other operators...
«MetaClass»
HasRightCategories
«MetaClass»
HasRightValue2D
«MetaClass»
HasRightValue1D
«MetaClass»
OperatorExpr
Figure 7: Fuzzy conditions.
4 RELATED WORK
The main idea of our approach is to gradually trans-
form a system specification with strict logical rules to
more fuzzy rules and ultimately towards a generic neu-
ral network and subsequent evaluation of a fuzzy logic
system. Thus, the related work areas are application of
neural network for representation of logical formulas
and applying them in adaptive systems. Also, as the
approach is based on models and transformation, the
related areas are usage of model-driven approaches in
adaptive systems.
The idea of using neural network for logic condi-
tions is not new and first attempts can be found in (Li
et al., 2001), where a kind of calculus method to deter-
mine the truth-values of propositional logic formulas is
defined. The recent approaches in this direction can be
found in (Shi et al., 2019; Riegel et al., 2020), where
more sophisticated neural networks are employed. We
in general take a similar approach, however we are
applying it in practice in the area of adaptive systems.
Most importantly, we shape it as a model transforma-
tion pipeline to integrate it better with MDD process.
As we move to the domain of adaptive systems,
there are also applications of neural networks and ma-
Towards Model-driven Fuzzification of Adaptive Systems Specification
341

chine learning. A quite large area (but not directly
related) is anomaly detection in such systems (detect-
ing attacks, intrusions, etc.). An overview of such
techniques can be found in (Mohammadi Rouzbahani
et al., 2020).
There are also a number of closely related ap-
proaches that employ neural networks and machine
learning directly in the adaptation cycle. For example
in (Van Der Donckt et al., 2020), neural network-based
approach is applied during the analysis and planning
phase of the MAPE-K cycle to reduce adaptation space.
We propose to use neural networks in the same phases
but to fuzzify strict conditions and make them learn-
able. Similarly to the previous approach, neural net-
works are employed in (Gabor et al., 2020) as well to
reduce large adaptation space. Different application
of neural networks in adaptive systems can be found
in (Muccini and Vaidhyanathan, 2019), where they are
used to predict QoS parameters of a system and thus
allow for proactive adaptation.
A model-driven approaches to model and develop
adaptive systems can be found in several works, e.g.,
in (D’Angelo et al., 2018) and (Weyns and Iftikhar,
2019) but they do not employ any machine learning
methods. In the conclusion of the latter paper, the au-
thors plan to include them and in (Weyns et al., 2021),
the same authors propose inclusion of machine learn-
ing techniques to most of the phases of the adaptation
cycle (primarily to predict and optimize adaptation).
However, none of these inclusion follows the same or
similar approach as our one.
Conceptually similar approach is discussed
in (Ghahremani et al., 2018), where machine learning
techniques are utilized to train a model for rule-based
adaptation. Nevertheless, the authors use different
machine learning approaches than neural networks.
To sum up, there are numerous approaches com-
bining neural networks and adaptive systems, but none
of them uses the same direction as our one — that is
to view the integration of neural networks to adaptive
systems as a gradual model transformation process
which makes it possible to scale the learning capacity
of the system.
5 CONCLUSION
We have proposed an approach of gradual transforma-
tion of the traditional logical rule-based specification
of adaptive systems into a specification where the rules
are learnable and implemented as generic neural net-
works. As the paper is a position one, we are currently
working on an implementation of the approach. Partic-
ularly, we are focusing on two directions.
First, we are working on the complete specification
of the meta-models and transformations. We plan to
employ a modeling tool (EMF
4
-based one), for which
we plan to create plugins assisting developers during
the transformations.
Second, we are working on the evaluation of the
approach. It means a definition of semantics of the
fuzzy operators — i.e., definition of a structure of
underlying neural networks and implementation of the
runtime environment for ensemble execution.
ACKNOWLEDGMENTS
This work has been partially supported by the Czech
Science Foundation project 20-24814J and also par-
tially supported by Charles University institutional
funding SVV 260451.
REFERENCES
Bureš, T., Gerostathopoulos, I., Hn
ˇ
etynka, P., and Pacovský,
J. (2020). Forming Ensembles at Runtime: A Machine
Learning Approach. In Proceedings of ISOLA 2020,
Rhodes, Greece, volume 12477 of LNCS. Springer.
Bures, T., Gerostathopoulos, I., Hnetynka, P., Plasil, F., Krijt,
F., Vinarek, J., and Kofron, J. (2020). A language and
framework for dynamic component ensembles in smart
systems. International Journal on Software Tools for
Technology Transfer, 22(4):497–509.
D’Angelo, M., Napolitano, A., and Caporuscio, M. (2018).
CyPhEF: a model-driven engineering framework for
self-adaptive cyber-physical systems. In Companion
Proceedings of ICSE 2018, Gothenburg, Sweden, pages
101–104. ACM.
Gabor, T., Sedlmeier, A., Phan, T., Ritz, F., Kiermeier, M.,
Belzner, L., Kempter, B., Klein, C., Sauer, H., Schmid,
R., Wieghardt, J., Zeller, M., and Linnhoff-Popien, C.
(2020). The scenario coevolution paradigm: adaptive
quality assurance for adaptive systems. International
Journal on Software Tools for Technology Transfer,
22(4).
Ghahremani, S., Adriano, C. M., and Giese, H. (2018). Train-
ing Prediction Models for Rule-Based Self-Adaptive
Systems. In Proceedings of ICAC 2018, Trento, Italy.
Li, H., Qin, K., and Xu, Y. (2001). Dynamic neural net-
works for logic formula. In Proceedings of the 8th
international conference on information processing.
Mohammadi Rouzbahani, H., Karimipour, H., Rahimne-
jad, A., Dehghantanha, A., and Srivastava, G. (2020).
Anomaly Detection in Cyber-Physical Systems Using
Machine Learning. In Handbook of Big Data Privacy.
Muccini, H. and Vaidhyanathan, K. (2019). A Machine
Learning-Driven Approach for Proactive Decision
4
https://www.eclipse.org/modeling/emf/
MODELSWARD 2022 - 10th International Conference on Model-Driven Engineering and Software Development
342

Making in Adaptive Architectures. In Companion Pro-
ceedings of ICSA 2019, Hamburg, Germany.
Riegel, R., Gray, A., Luus, F., Khan, N., Makondo, N.,
Akhalwaya, I. Y., Qian, H., Fagin, R., Barahona,
F., Sharma, U., Ikbal, S., Karanam, H., Neelam, S.,
Likhyani, A., and Srivastava, S. (2020). Logical Neu-
ral Networks. arXiv:2006.13155 [cs].
Shi, S., Chen, H., Zhang, M., and Zhang, Y. (2019). Neural
Logic Networks. arXiv:1910.08629 [cs, stat].
Van Der Donckt, J., Weyns, D., Quin, F., Van Der Donckt,
J., and Michiels, S. (2020). Applying deep learning to
reduce large adaptation spaces of self-adaptive systems
with multiple types of goals. In Proceedings of SEAMS
2020, Seoul, Korea. ACM.
Weyns, D. and Iftikhar, M. U. (2019). ActivFORMS: A
Model-Based Approach to Engineer Self-Adaptive Sys-
tems. arXiv:1908.11179 [cs].
Weyns, D., Schmerl, B., Kishida, M., Leva, A., Litoiu, M.,
Ozay, N., Paterson, C., and Tei, K. (2021). Towards
Better Adaptive Systems by Combining MAPE, Con-
trol Theory, and Machine Learning. In Proceedings of
SEAMS 2021, Madrid, Spain, pages 217–223. IEEE.
Towards Model-driven Fuzzification of Adaptive Systems Specification
343
