
Generative Model for Autoencoders Learning by Image Sampling
Representations
V. E. Antsiperov
a
Kotelnikov Institute of Radioengineering and Electronics of RAS, Mokhovaya 11-7, Moscow, Russian Federation
Keywords: Ideal Image, Counting Statistics, Autoencoders, Generative Model, Machine Learning, Feature Extraction.
Abstract: The article substantiates a generative model for autoencoders, learning by the input image representation
based on a sample of random counts. This representation is used instead of the ideal image model, which
usually involves too cumbersome descriptions of the source data. So, the reduction of the ideal image concept
to sampling representations of fixed (controlled) size is one of the main goals of the article. It is shown that
the corresponding statistical description of the sampling representation can be factorized into the product of
the distributions of individual counts, which fits well into the naive Bayesian approach and some other
machine learning procedures. Guided by that association the analogue of the well-known EM algorithm – the
iterative partition–maximization procedure for generative autoencoders is synthesized. So, the second main
goal of the article is to substantiate the partition–maximization procedure basing on the relation between
autoencoder image restoration criteria and statistical maximum likelihood parameters estimation. We succeed
this by modelling the input count probability distribution by the parameterized mixtures, considering the
hidden mixture variables as autoencoder’s internal (coding) data.
1 INTRODUCTION
Machine learning methods have been attracting the
attention of researchers for more than half a century.
The first methods and approaches were largely
borrowed / adapted from the statistical theory, whose
foundations were established about a hundred years
ago, primarily by the works of R. Fisher. Discoveries
in related fields in the middle of the XX-th century,
primarily in neuropsychology, greatly influenced the
development and originality of machine learning. We
note in this connection the McCulloch and Pitts
model of the neuron (1943) and the Hebb’s rule for
the perceptron (1949). This was followed by a
relatively long period of experience accumulation and
analysis of the possibilities of implementing network
learning methods on computers. A breakthrough in
this direction was the invention in the mid-1980s by
Rumelhart, Hinton, and Williams of the error
backpropagation algorithm for training neural
networks (1986).
Over the past 30-40 years, the evolution of neural
networks has come a long way. Along with the
supervised approaches, unsupervised ones began to
a
https://orcid.org/0000-0002-6770-1317
develop, deep learning is gaining more importance.
Under the influence of these trends, several new
classes of neural networks have appeared and
developed. Note here DBNs (Deep Belief Networks),
CNNs (convolutional neural networks), RNNs
(recurrent neural networks), as well as LSTMs (Long
Short-Term Memory) and AEs (autoencoders).
Without exaggeration, autoencoders are at the
forefront of unsupervised learning. This is partly due
to the symmetry of their architecture, which is a
coupled codec pair. In non-AE approaches, where
either an encoder or a decoder is absent, expensive
optimization algorithms should be used to find the
code or sampling techniques to achieve restoration. In
contrast to them, AE contains both elements in its
structure, moreover, encoder and decoder actively
influence the solution of each other's problems.
In this work, we propose a new approach to
learning AE by the images presented in a special way
– by special sampling representations. The first half
of the paper discusses in detail the relation of
sampling representation with the ideal image model.
The second part of the paper is devoted to learning
AE in generative model using the sampling
354
Antsiperov, V.
Generative Model for Autoencoders Learning by Image Sampling Representations.
DOI: 10.5220/0010915200003122
In Proceedings of the 11th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2022), pages 354-361
ISBN: 978-989-758-549-4; ISSN: 2184-4313
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

representations at the input. The questions of
generative model formalization, encoding/decoding
procedures optimization and their connection to the
method of maximum likelihood estimation in
statistical theory are considered in detail.
2 IMAGE SAMPLING
REPRESENTATION
In several previous papers (Antsiperov, 2021 a, b) we
proposed the representation of images by the samples
of random counts (basing on counting statistics (Fox,
2006)). This approach was partially substantiated in
(Seitz, 2011) by the physical mechanisms of the real
image formation and detection.
Today’s relevance of the proposed representation
is due, on the one hand, to progress in the SPAD
(single photon avalanche diodes) video matrixes, that
register radiation in the form of a discrete set of
photocounts (Fossum, 2020), (Morimoto, 2020). On
the other hand, it is due to the ever-increasing trends
in the adaptation of human visual perception
mechanisms for digital image processing (Beghdadi
2013), (Rodieck, 1998).
Both of the tendences mentioned incorporate
several common features. The SPAD-matrixes, as
well as human retina include some sensitive 2D-
surface, which consists of a very large number of
detectors/receptors. These detectors are so small, that
each of them can detect the individual photon of the
incident radiation. The detailed, comprehensive
review of these trends in modern photon-counting
sensors can be found in the book (Fossum, 2017). The
use of visual perception mechanisms for digital image
processing is widely discussed in (Gabriel, 2015). So,
the listed features can be taken as the basis of the
concept of the ideal imaging device, generalizing
besides the photon-counting sensors mentioned also
the photographic plates with gelatin-silver emulsion,
etc.
Formally, the definition of an ideal imaging
device is as follows. It is a two-dimensional surface
𝛺 with coordinates 𝑥⃗𝑥
,𝑥
, on which identical
point detectors are allocated close to each other. Point
detectors, or in terms of (Fossum, 2020) "jots", have
by a definition a vanishingly small area 𝑑𝑎 of light-
sensitive surfaces. Accordingly, if the total number of
detectors is 𝑁, then the total area of surface 𝛺 is equal
to 𝐴𝑁𝑑𝑎. Under the assumption that 𝐴 is fixed
and 𝑑𝑎 → 0 , the number 𝑁 is assumed to be
arbitrarily large: 𝑁→∞.
When the ideal imaging device registers the
stationary radiation with intensity 𝐼
𝑥⃗
,𝑥⃗∈𝛺, some
of point detectors generate the counts – random
events that in the case of SPAD matrixes are the
releases of an electron from p-n junction of the
photodiode, in the case of retina activations of
rhodopsin molecules in photoreceptors and in the case
of photographic plates appearing of metallic silver
atom clusters in or on a silver halide crystal. Within
the framework of the semiclassical theory of
interaction between radiation and matter, the counts
are associated with incident photons captured by
atoms / molecules of the detector's material. At the
limit 𝑑𝑎 → 0 the probability of a count (in any
interpretation) for a given point detector is the
product 𝛼𝑇𝐼𝑥⃗𝑑𝑎, where 𝛼𝜂ℎ𝜈̅
, ℎ𝜈̅ the
average energy of the incident photon (ℎ Planck's
constant, 𝜈̅ characteristic frequency of radiation),
the dimensionless coefficient 𝜂1 is the quantum
efficiency of the detector’s material (Fox, 2006), 𝑇 is
exposure time. Thus, when the incident radiation of
intensity 𝐼
𝑥⃗
is registered, the state of each point
detector 𝑥⃗∈𝛺 can be described by a binary random
variable 𝜎
⃗
∈0,1, taking the values 𝜎
⃗
1 and
𝜎
⃗
0, depending on whether has the detector
generate a count. The conditional (at a given intensity
𝐼𝑥⃗) probabilities of 𝜎
⃗
have the form of Bernoulli
distribution:
𝑃
𝜎
⃗
1|𝐼𝑥
⃗
𝛼𝑇𝐼𝑥
⃗
𝑑𝑎,
𝑃
𝜎
⃗
0|𝐼𝑥
⃗
1𝛼𝑇𝐼𝑥
⃗
𝑑𝑎.
(1)
Note that, according to (1), formally, the mean
number of counts for given point detector 𝑥⃗ is equal
to 𝜎
⃗
𝛼𝑇𝐼𝑥⃗𝑑𝑎 (it is assumed, that 𝜎
⃗
1).
Accordingly, the integral 𝑛
∑
𝜎
⃗
⃗
∈
𝛼𝑇
∬
𝐼
𝑥⃗
𝑑𝑎
defines the mean number of all
registered over time 𝑇 counts.
Based on the concept of an ideal imaging device
and considering the main features of its registration
mechanism (1), it is possible to formulate a model of
an ideal image as a resultant set of counts, generated
during the registration process. Namely, under the
ideal image we mean the (ordered) set 𝑋
𝑥⃗
,…,𝑥⃗
, 𝑥⃗
∈𝛺 of 𝑛 random counts registered
(𝜎
⃗
1) by the ideal imaging device during the time
𝑇. Thus, an ideal image is a kind of random object, a
random set of count coordinates 𝑥⃗
∈𝛺, which
should be distinguished from any of its realization.
We use the name "ideal image" for the proposed
construction, following the authors of (Pal, 1991), in
which they introduced this term for the first time in
the early 90s. It is worth noting that the randomness
of the ideal image is related not only to the random
Generative Model for Autoencoders Learning by Image Sampling Representations
355

nature of count coordinates 𝑥⃗
, but also it is
determined by the random value of 𝑛 – the number of
counts in the set.
A complete statistical description of ideal image
𝑋 in the form of finite-dimensional probability
distribution densities 𝜌𝑥⃗
,…,𝑥⃗
,𝑛|𝐼
𝑥⃗
, 𝑥⃗
∈
𝛺,𝑛 0,1,... can be obtained by assuming
conditional independence of all counts 𝑥⃗
(under the
condition of the given 𝐼
𝑥⃗
and 𝑛). It is well known
(Poisson’s theorem, (Gallager, 2013)), that under
such assumptions, asymptotically, with 𝑁→∞ the
probability distribution of Bernoulli process (trial)
𝜎
⃗
,𝑥⃗∈𝛺 (1) converges to the Poisson process
distributions (Streit, 2010) on 𝛺:
𝜌𝑥
⃗
,…,𝑥
⃗
,𝑛|𝐼
𝑥
⃗
∏
𝜌𝑥
⃗
|𝐼
𝑥
⃗
𝑃
𝑊
,
(2)
where
𝑃
𝑊
!
exp
𝛼𝑇𝑊
,
𝜌𝑥
⃗
|𝐼
𝑥
⃗
⃗
,𝑊
∬
𝐼
𝑥
⃗
𝑑𝑎
where 𝑃
𝑊
is the Poisson probability distribution
(Gallager, 2013), (Streit, 2010) of 𝑛 – number of
counts in ideal image 𝑋, 𝑛𝛼𝑇𝑊 is its mean, 𝑊 is
the overall registered radiation power. Conditional
𝜌𝑥⃗|𝐼
𝑥⃗
is the density of single count probability
distribution. In connection with (2), it is interesting to
note that the (statistical) intensity of 2D point Poisson
process 𝜎
⃗
𝑑𝑎
⁄
coincides with the physical intensity
𝐼
𝑥⃗
of the recorded radiation up to the constant 𝛼𝑇.
From the theoretical point of view the concept of
an ideal image is a very attractive statistical object
due to the simplicity of its statistical description (2)
and its interpretation as an inhomogeneous point
Poisson process that had been well studied for a long
time. However, in practical tasks it is not always
possible to use this concept directly in the form in
which it is formulated. Namely, for common recorded
radiation intensities 𝐼
𝑥⃗
, the direct use of the ideal
image realization 𝑋
𝑥⃗
,…,𝑥⃗
would require
enormous computational resources when the number
of counts 𝑛 is big enough. So, considering that on a
clear day the flux of photons from the sun falling on
a surface with 𝐴 ~ 1 𝑚𝑚
per second is of order
~ 10
10
photons (Rodieck, 1998), the devices
in a photon counting mode will generate the
information flow of the value of 𝑛 ~ 10
(1 Pbit/sec).
Obviously, it is very problematic to process such
information with the modern computing technique.
To avoid the "curse of dimension" of ideal image
representation, we propose the following solution
(Antsiperov, 2021 a). Let us represent the image not
by the complete sets of ideal image counts 𝑋
𝑥⃗
,…,𝑥⃗
, but only by some subset 𝑋
𝑥⃗
,…,𝑥⃗
, 𝑗
∈1,…,𝑛 of acceptable fixed size
𝑘, where 𝑥⃗
are randomly selected counts from 𝑋.
Formally, considering 𝑋 as a general population of
counts, we propose to use only a random sample 𝑋
of them to represent the image. Obviously, in full
agreement with the classical statistical paradigm,
such a "sample" representation will still represent the
ideal image 𝑋 . Let us name such a sample 𝑋
"representation by a sample of random counts" or, in
short, the sampling representation.
The statistical description of sampling
representation follows easily from (2) by integrating
density 𝜌𝑥⃗
,…,𝑥⃗
,𝑛|𝐼
𝑥⃗
over the not selected in
𝑋
count coordinates and summing the result over the
number 𝑙 of not selected counts. In the actual case
1≪𝑘≪𝑛 the statistical description of sampling
representation 𝑋
is given with high accuracy by the
probability distribution density of the form:
𝜌𝑋
|𝐼
𝑥
⃗
∏
𝜌
𝑥
⃗
|𝐼
𝑥
⃗
,
𝜌
𝑥
⃗
|𝐼
𝑥
⃗
⃗
,𝑊
∬
𝐼
𝑥
⃗
𝑑𝑎
.
(3)
Regarding description (3), it should be noted that
it has very simple structure, depending only on the
shape (normalized version) of the registered intensity
𝐼
𝑥⃗
𝑊
⁄
. This immediately leads to some attractive
representation properties. First, it reveals the
conditional independence of all 𝑘 counts 𝑥⃗
and their
identical conditional distribution (iid property).
Second, the density of the individual count
𝜌𝑥⃗
|𝐼𝑥⃗ is very simply related to intensity 𝐼𝑥⃗ of
radiation – they are proportional to each other. Third,
the description satisfies the following universality
property: it does not depend either on the quantum
efficiency of the detector material 𝜂 , or on the
incident radiation average frequency 𝜈̅ , or on frame
time 𝑇 . These sampling presentation properties
provide a convenient, suitable input data for many
well–developed statistical and machine learning
approaches, including the naive Bayesian approach
(Barber, 2012).
A consequence of the universality property is also
the fact that statistical description of the sampling
representation (3) does not depend on physical units
of intensity 𝐼𝑥⃗. So, if, for example, the intensity
𝐼𝑥⃗ is given by pixels of some bitmap image,
obtained by digitization with a quantization
parameter 𝑄Δ𝐼, then description (4) will not
directly dependent on 𝑄, but it will depend only on
ICPRAM 2022 - 11th International Conference on Pattern Recognition Applications and Methods
356

the pixel color depth 𝜐. This remark allows to
generate sampling representations not only for the
source data of the photon counting sensors, but also
for common digital images obtained by traditional
camera. To do this, one should use the all-image
pixels 𝑛
to form an approximation
𝑛
∑
𝑛
𝐼
𝑥⃗
𝑊
⁄⁄
of the original normalized
intensity and then simulate the process of sampling
independent counts from it according (3). Regarding
the computational organization of sampling,
fortunately, in the field of machine learning, there is
a large arsenal of methods, collectively called Monte
Carlo methods (Murphy, 2012), that can do this very
efficiently.
It should be noted that for some methods even
pixels 𝑛
normalization is not required at all – it is
sufficient that all pixels are bounded from above by
the constant 2
, where 𝜐 is the color depth of the
image. For example, Figure 1 shows count
representations of the picture “cameraman”
(distributed by the MathWorks, Inc. with permission
from the MIT), presented in subfigure A. The
sampling representations with sizes 500 000,
1 000 000 and 5 000 000, 1 000 000 and 5 000 000
counts – B, C and D were carried out by one of the
simplest sampling procedures – acceptance-rejection
method using a uniform proposal distribution.
3 LEARNING AE BY SAMPLING
REPRESENTATIONS
Usually, autoencoders (AE) are considered as a
special class of artificial neural networks (ANNs)
(Hinton, 1994), but for our purposes it is desirable to
define them from a more general point of view.
Namely, we will consider AEs as a special class of
information systems, understood as an "integrated set
of components for collecting, storing and processing
data" (Information system. In Encyclopedia
Britannica, 2020). In current context, the processing
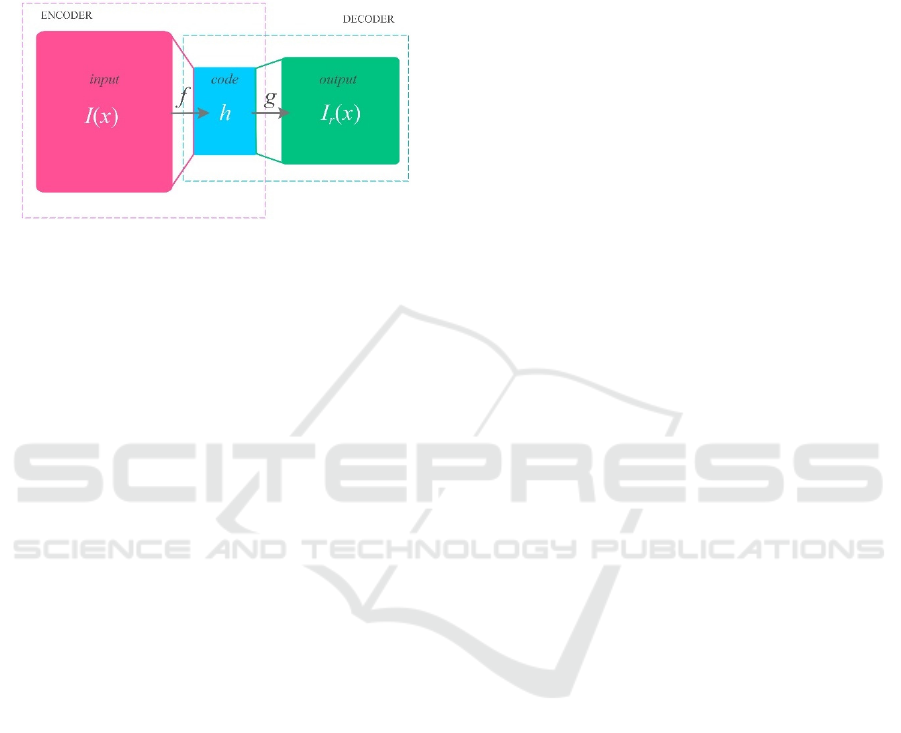
data means the images. As usual, AEs have a
symmetric three-tier input-code-output structure, as
shown in Figure 2, where the middle tier is for
encoding the input data. Pairs of adjacent tiers make
up two reciprocal components: input-code as an
encoder and code-output as a decoder (Goodfellow,
2016). The goal of AE is to restore the input data to
the output, while observing certain restrictions
imposed on the internal encoding. Because of these
restrictions, it is not allowed to simply copy data from
input to output. Typical restrictions are related to a
dimensionality reduction of intermediate (coding)
Figure 1: Representation of the “cameraman” image by
samples of random counts: A – the original image in TIF
format, B, C, D – sampling representations of the sizes,
respectively, 500 000, 1 000 000 and 5 000 000 counts.
data, which excludes input-output bijection. The
presence of such a bottleneck on the one hand and the
main AE task on the other hand implies some optimal
coding for intermediate data.
In the light of modern approaches, such a coding
can be synthesized basing on unsupervised AE
Generative Model for Autoencoders Learning by Image Sampling Representations
357
learning. Note that although the term "autoencoder"
is currently the most popular term, due to the very
broad scope of given definition, it can also be used
synonymously with auto-associative memory
networks (Kohonen, 1989), replicator ANN (Hecht-
Nielsen, 1995), etc.
Figure 2: Schema of a basic Autoencoder.
To formalize the AE problem, let us present its
general mathematical frame (Baldi, 2012). We
assume the following. First, the sets 𝒢 of images
𝐼𝑥⃗,𝑥⃗∈𝛺 and ℱ of internal images representations
(code) ℎ
⃗
are given (see Figure 2). Second, the classes
of operators 𝑓: 𝒢 → ℱ (encoders) and 𝑔: ℱ → 𝒢
(decoders), agreed in dimensions with ℱ and 𝒢 and
with the given restrictions are specified. Third, a
numerical measure of distortion between the image
𝐼𝑥⃗ and some of its reconstruction 𝐼
𝑥⃗ is available
– the so-called loss function 𝐿𝐼
𝑥⃗
,𝐼
𝑥⃗
(Goodfellow, 2016). Within this framework, the main
problem of AE is to minimize the loss function with
respect to the encoder 𝑓 and decoder 𝑔 operators:
𝑓
∗
,𝑔
∗
𝑎𝑟𝑔min
,
𝐿
𝐼
𝑥
⃗
, 𝑔 ∘
𝑓
𝐼
𝑥
⃗
.
(4)
Any solution 𝑓
∗
(5) would be considered as the
desired coding for the optimal restoration 𝑔
∗
of the
image. Unfortunately, solving (4) in its most general
form is an unrealistic task. Therefore, in the study of
practical problems, it is necessary to specify the
elements of the general AE framework. Different
kinds of AEs can be derived depending on the choice
of sets 𝒢 and ℱ, special classes of operators 𝑓 and 𝑔
and the explicit form of loss function 𝐿 . If, for
example, 𝒢 and ℱ are linear spaces of dimensions 𝑛
and 𝑝 respectively, 𝑓 and 𝑔 are appropriate linear
operators ( 𝑛 𝑝 and 𝑝 𝑛 matrixes) and 𝐿 is a
𝐿
norm
‖
𝐼
𝑥⃗
𝐼
𝑥⃗
‖
in 𝒢 , we get a linear
autoencoder. It is interesting to note that a linear
autoencoder results in the same internal data
representation ℎ
⃗
as the principal component analysis
(PCA) (Plaut, 2018). Moreover, it is easy to
generalize the PCA to nonlinear NLPCA, if weaken
the linearity condition for the encoder 𝑓: 𝒢 → ℱ.
Such (nonlinear) AEs can learn a non-linear
manifolds for coded data instead of finding a low
dimensional approximating hyperplane.
In our case, the images are specified by sampling
representations 𝑋
𝑥⃗
,𝑖 1,…,𝑘 , generated
according to the probability distribution density of the
counts 𝜌𝑥⃗|𝐼
𝑥⃗
, which is uniquely related to the
registered intensity 𝐼
𝑥⃗
(3). So, it is quite reasonable
to consider the set 𝒢 as the set of probability densities
𝜌
𝑥⃗
on the image surface 𝑥⃗∈𝛺. This immediately
brings us to the generative models for autoencoders
(Goodfellow, 2016). In contrast to the traditional AE,
which are most naturally interpreted as the
regularization schemes, autoencoders in generative
paradigm consider the internal encoded data ℎ
⃗
as
latent variables and the coding operation 𝑓: 𝒢 → ℱ as
inference procedure (computing latent representation
for given 𝑋
). In this regard, generative models learn
to maximize the likelihood of 𝐼
𝑥⃗
conditioned by
input data (representation) 𝑋
, rather than copying
inputs to outputs. So, regularization issues don't
matter much for generative AE. As an example, a
couple of generative modeling approaches to
autoencoders can be mentioned here – the variational
autoencoder (VA) (Kingma, 2014) and the generative
stochastic network (GSN) (Alain, 2015).
To formalize the generative model for sampling
representations 𝑋
𝑥⃗
, let us consider the first set
𝒢 as some parametric family 𝒢𝜌𝑥⃗ | 𝜃
⃗
, 𝑥⃗∈𝛺,
𝜃
⃗
∈𝛩⊂ℝ
of probability distribution densities of
individual count 𝑥⃗ . The parameters 𝜃
⃗
∈𝛩 of
representation are associated with the unknown
normalized intensity 𝐼
𝑥⃗
and are intended for its
parametric approximation. Parametrization of the
distributions under study 𝜌𝑥⃗|𝐼
𝑥⃗
is a common
technique that simplifies the problem of functional
optimization to a problem of optimal parameters
estimation. The unsupervised learning for generative
model AE consists in fitting 𝜌𝑥⃗ | 𝜃
⃗
∗
∈𝒢 for some
𝜃
⃗
∗
, considering as AE output, to a training data 𝑋
.
Note, that formally, sampling representation 𝑋
is not
an element of 𝒢 and it can’t be considered as the input
of AE. Instead of it, we should utilize conditional
probability density 𝜌𝑥⃗ | 𝑋
𝑥⃗
. Assuming, in
the spirit of the Bayesian approach, that the
parameters 𝜃
⃗
are random variables with any prior
probability distribution density 𝑃𝜃
⃗
, similarly to
how it was done in (Antsiperov, 2021b), we can write
the following expression for the conditional density:
ICPRAM 2022 - 11th International Conference on Pattern Recognition Applications and Methods
358

𝜌𝑥
⃗
| 𝑋
𝑥
⃗
⃗
,
⃗
,...,
⃗
⃗
,...,
⃗
∬
⃗
,
⃗
,...,
⃗
|
⃗
⃗
⃗
⃗
,...,
⃗
∬
⃗
|
⃗
⃗
|
⃗
⃗
⃗
⃗
,...,
⃗
∬
𝜌𝑥
⃗
|𝜃
⃗
𝜌
𝜃
⃗
|𝑋
𝑥
⃗
𝑑𝜃
⃗
, (5)
where we used the property of the conditional iid of
all samples 𝑥⃗,𝑥⃗
,...,𝑥⃗
(for a given 𝜃
⃗
or, which is
the same, for a given 𝐼
𝑥⃗
). As it is known, density
𝜌
𝜃
⃗
|𝑋
𝑥⃗
is, at least asymptotically 𝑘≫1, a
much narrower function than 𝜌𝑥⃗|𝜃
⃗
. Since the
maximum of 𝜌
𝜃
⃗
|𝑋
𝑥⃗
coincides with the
maximum likelihood estimate 𝜃
⃗
, the density
𝜌𝑥⃗|𝜃
⃗
can be taken out from the integral in (5) as the
independent of 𝜃
⃗
factor 𝜌𝑥⃗|𝜃
⃗
. This immediately
leads to the following (see also (Antsiperov, 2021b)):
𝜌𝑥
⃗
| 𝑋
𝑥
⃗
≅𝜌𝑥
⃗
|𝜃
⃗
.
(6)
Coming back, we can use at the input of AE the
density 𝜌𝑥⃗|𝜃
⃗
∈𝒢, which accumulates all the
necessary information of the representation 𝑋
𝑥⃗
by means of a statistic 𝜃
⃗
𝑥⃗
, that is a solution
of R.A. Fisher’s maximum likelihood equation
(Aldrich, 1997):
𝜃
⃗
𝑎𝑟𝑔max
⃗
∈
𝐿𝜃
⃗
;𝑋
,
𝐿𝜃
⃗
;𝑋
𝜌𝑋
| 𝜃
⃗
∏
𝜌𝑥
⃗
| 𝜃
⃗
.
. (7)
Considering the developed generative model
formalization, it seems, that conceptually the solution
of the AE main problem becomes straightforward.
Namely, this solution consists in forming the density
𝜌𝑥⃗|𝜃
⃗
∈𝒢 at the input of the autoencoder, using
the sample representation 𝑋
(by generating sample
statistics 𝜃
⃗
𝑋
) and transmitting it in some coded
form to the output. Obviously, formed in such a
manner the input and output densities provide the
minimum for any suitable loss function
𝐿𝜌𝑥⃗|𝜃
⃗
,𝜌𝑥⃗ | 𝜃
⃗
∗
, if the appropriate encoding-
decoding procedures guarantee 𝜃
⃗
∗
~𝜃
⃗
.
The seeming elegance of solving AE problem
within the generative model framework is associated
with the replacement of the input data coding problem
by the problem of calculating maximum likelihood
estimate (7). However, the problem (7), which has
been known for a hundred years, starting with Fisher's
works (see (Aldrich, 1997)), in real applications turns
out not much simpler, than the coding problem.
Moreover, the development of such modern direction
as machine learning (including autoencoders) was
largely due to the needs of an approximate solution of
the maximum likelihood problem. For this reason, to
further refine the generative model, we will develop
the "proper autoencoder" method for solving the main
problem of the AE, considering it as a special class of
methods for solving the maximum likelihood
equation (7).
The main assumption for our special generative
model is that the parametric family 𝒢𝜌𝑥⃗ | 𝜃
⃗
admits latent (hidden) variables. Let us consider the
simplest case, where each count 𝑥⃗ is associated with
a single latent variable 𝑗, that takes only a finite set of
discrete values: 𝑗∈1,…,𝐾. Let us denote the
density of joint probability distribution of 𝑥⃗ and 𝑗 by
𝜌𝑥⃗,𝑗 | 𝜃
⃗
. In what follows, we implicitly assume that
𝜌𝑥⃗,𝑗 | 𝜃
⃗
is more tractable than 𝜌𝑥⃗| 𝜃
⃗
, since the
latter is a marginal distribution of the former:
𝜌𝑥
⃗
|𝜃
⃗
∑
𝜌𝑥
⃗
,
𝑗
| 𝜃
⃗
(8)
and the sum in (8) can contain a large number 𝐾 of
terms. The density (9) is generally called the finite
mixture of components and traditionally components
are written in the form 𝜌𝑥⃗,𝑗 | 𝜃
⃗
𝑤
𝜌
𝑥⃗ | 𝜃
⃗
,
where 𝑤
𝜌𝑗 | 𝜃
⃗
is the weight (probability) of the
𝑗 –component, and 𝜌
𝑥⃗ | 𝜃
⃗
is the conditional
distribution of the count coordinates 𝑥⃗ for the
component 𝑗 . As a rule, component weights are
considered as a subset of a parameters: 𝑤
⊂𝛩.
In accordance with (8), the density of the joint
distribution of the sampling representation 𝑋
𝑥⃗
(3) can be written in the form:
𝜌𝑋
|𝜃
⃗
∏
∑
𝜌𝑥
⃗
,
𝑗
| 𝜃
⃗
∑
∏
𝜌𝑥
⃗
,
𝑗
|𝜃
⃗
⃗
∑
𝜌𝑋
,ℎ
⃗
| 𝜃
⃗
⃗
.
(9)
where the ordered set (vector) ℎ
⃗
𝑗
,…,𝑗
,𝑗
∈
1,…,𝐾 represents the latent variables of
autoencoder, i. e. the inner representation of
𝜌𝑋
| 𝜃
⃗
, defined on the 𝑛-cube ℱ1,…,𝐾
. It
is easy to see that the density (6) is also a finite
mixture of components with component weights
𝑊
⃗
∏
𝑤
and conditional distributions
𝜌
⃗
𝑋
| 𝜃
⃗
∏
𝜌
𝑥⃗
| 𝜃
⃗
of 𝑋
for given
component with multi-index ℎ
⃗
.
Generative Model for Autoencoders Learning by Image Sampling Representations
359

For densities representable in the form of mixtures
(9), there is an important relation between their so-
called score 𝑠⃗𝜃
⃗
,𝑋
∇
⃗
ln𝜌𝑋
| 𝜃
⃗
and
corresponding scores for a joint distributions
𝑠⃗
⃗
𝜃
⃗
,𝑋
∇
⃗
ln𝜌𝑋
,ℎ
⃗
| 𝜃
⃗
:
𝑠⃗𝜃
⃗
,𝑋
|
⃗
∇
⃗
𝜌𝑋
| 𝜃
⃗
|
⃗
∑
∇
⃗
𝜌𝑋
,ℎ
⃗
| 𝜃
⃗
⃗
∑
,
⃗
|
⃗
|
⃗
,
⃗
|
⃗
∇
⃗
𝜌𝑋
,ℎ
⃗
| 𝜃
⃗
⃗
∑
𝜌ℎ
⃗
|𝑋
,𝜃
⃗
𝑠
⃗
⃗
𝜃
⃗
,𝑋
⃗
.
(10)
The importance of scores in the statistics is
associated with the fact that sufficient conditions for
solution 𝜃
⃗
of the maximum likelihood problem (7)
can be written in the form: 𝑠⃗𝜃
⃗
,𝑋
0
⃗
.
Accordingly, the importance of the relation (10) lies
in the fact that it allows one to express these
conditions in an alternative form:
∑
𝜌ℎ
⃗
|𝑋
,𝜃
⃗
𝑠⃗
⃗
𝜃
⃗
,𝑋
⃗
0
⃗
.
(11)
Insofar as
𝑠⃗
⃗
𝜃
⃗
,𝑋
∇
⃗
ln𝜌 𝑋
,ℎ
⃗
| 𝜃
⃗
∑
∇
⃗
ln𝜌𝑥
⃗
,
𝑗
| 𝜃
⃗
. (12)
and if 𝜌𝑥⃗,𝑗 | 𝜃
⃗
is more tractable than 𝜌𝑥⃗| 𝜃
⃗
(8),
then the score 𝑠⃗
⃗
𝜃
⃗
,𝑋
(12) will be more tractable
than 𝑠⃗𝜃
⃗
,𝑋
and it turns out that the solution of (11)
is much easier to find than solution of 𝑠⃗𝜃
⃗
,𝑋0
⃗
.
In addition, it is easy to see that (11) is very
similar to the gradient optimization equations for the
well–known EM–algorithm (Gupta, 2010), or its hard
clustering variant, known as K–means segmentation.
Indeed, approximate solution of (11) can be carried
out by iterations containing two main steps. The first
step consists in calculating the latent variables ℎ
⃗
that
maximize the posterior distribution 𝜌ℎ
⃗
|𝑋
,𝜃
⃗
𝑋
,ℎ
⃗
| 𝜃
⃗
𝜌𝑋
| 𝜃
⃗
for obtained in the previous
iteration parameters 𝜃
⃗
. And the second step is to find
a solution 𝜃
⃗
of the equation 𝑠⃗
⃗
𝜃
⃗
,𝑋
0
⃗
with ℎ
⃗
found at the first step.
Figure 3: Reconstructions of “cameraman” image
(1 000 000 counts) by various number of components 𝐾 in
intermediate representation: A – the original image in TIF
format, B, C, D –reconstructions, corresponding to 𝐾 =
100
2
,250
2
, 300
2
components.
ICPRAM 2022 - 11th International Conference on Pattern Recognition Applications and Methods
360

Putting together all the conclusions obtained
above, the final encoding 𝑓 and decoding 𝑔 operators
of autoencoders in a generative model with latent
variables ℎ
⃗
(in a finite mixture model) can be
formulated as follows:
Encoding: 𝑓: 𝒢 → ℱ ∶ 𝜌 𝑋
| 𝜃
⃗
→ℎ
⃗
:
ℎ
⃗
𝑋
,𝜃
⃗
𝑎𝑟𝑔 max
∈
,…,
𝜌𝑥
⃗
,
𝑗
| 𝜃
⃗
,…,𝜌𝑥
⃗
,
𝑗
| 𝜃
⃗
. (13)
Decoding: 𝑔: ℱ → 𝒢 ∶ ℎ
⃗
→𝜌𝑋
| 𝜃
⃗
:
𝑠
⃗
⃗
𝜃
⃗
,𝑋
0
⃗
.
(14)
The developed approach to learning generative
autoencoders by image sampling representations can
be naturally implemented in the form of a recurrent
computational procedure. Some examples of
reconstruction of sampling representation shown in
Figure 1 C (1 000 000 counts) are shown in Figure 3.
4 CONCLUSIONS
In the framework of generative model, a new
approach is proposed It provides the synthesis of
learning methods for autoencoders by images,
presented as samples of random counts. The issues of
simplicity of interpretation of the approach and the
immediacy of its algorithmic implementation are the
main content of the work. They make it attractive in
both theoretical and practical terms, especially in the
context of modern machine learning-oriented trends.
In a sense, the proposed method is an adaptation of R.
Fisher's maximum likelihood method for
autoencoders, which is widely used in traditional
statistics. The fruitful use of the latter has led to a
huge number of important statistical results. In this
regard, the author expresses the hope that the
proposed approach will also be useful in solving a
wide range of modern machine learning problems.
REFERENCES
Alain, G., Bengio, Y., et. al. (2015). GSNs: Generative
Stochastic Networks. arXiv:1503.05571.
Aldrich, J. R.A. (1997). Fisher and the Making of
Maximum Likelihood 1912-1922. In Statistical
Science. V. 12(3). P. 162-176.
Antsiperov, V.E. (2021, a). Representation of Images by the
Optimal Lattice Partitions of Random Counts. In Pat.
Rec. and Image Analysis, V. 31(3), P. 381–393.
Antsiperov, V. (2021, b). New Maximum Similarity
Method for Object Identification in Photon Counting
Imaging. In Proc. of the 10th Int. Conf. ICPRAM 2021.
V. 1: ICPRAM, P. 341-348.
Baldi, P. (2012). Autoencoders, unsupervised learning, and
deep architectures. In Proc. of Machine Learning
Research, V. 27, PMLR, Bellevue, USA. P. 37–49.
Barber, D. (2012). Bayesian Reasoning and Machine
Learning. Cambridge Univ. Press, Cambridge.
Beghdadi, A., Larabi, M.C. Bouzerdoum, A.,
Iftekharuddin, K.M. (2013). A survey of perceptual
image processing methods. In Signal Processing: Image
Communication, V. 28(8) P. 811-831.
Fossum, E.R., Teranishi, N., et al. (eds.) (2017). Photon-
Counting Image Sensors. MDPI.
Fossum, E.R. (2020). The Invention of CMOS Image
Sensors: A Camera in Every Pocket. In Pan Pacific
Microelectronics Symposium. P. 1-6.
Fox, M. (2006). Quantum Optics: An Introduction. Oxford
University Press. Oxford, New York.
Gabriel, C.G., Perrinet L., et al. (eds.) (2015). Biologically
Inspired Computer Vision: Fundamentals and
Applications. Wiley-VCH, Weinheim.
Gallager, R. (2013). Stochastic Processes: Theory for
Applications. Cambridge University Press. Cambridge.
Goodfellow, I, Bengio, Y., Courville, A. (2016).
Autoencoders. In Deep Learning, MIT Press. P. 499.
Gupta, M. R. (2010). Theory and Use of the EM Algorithm.
In Foundations and Trends in Signal Processing, V.1
(3). P. 223-296.
Hecht-Nielsen, R. Replicator. (1995). Neural Networks for
Universal Optimal Source Coding. In SCIENCE, V.269
(5232). P. 1860-1863.
Hinton, G. E., Zemel, R. S. (1994). Autoencoders,
minimum description length and Helmholtz free
energy. In Adv. in neural inform. process V. 6. P. 3-10.
Kingma, D.P. (2014). Welling M. Auto-Encoding
Variational Bayes. arXiv:1312.6114.
Kohonen, T. (1989). Self-Organization and Associative
Memory, 3-d Edition. Springer.
Morimoto, K., Ardelean, A., et al. (2020) Megapixel time-
gated SPAD image sensor for 2D and 3D imaging
applications. In Optica V. 7(4). P. 346-354.
Murphy, K.P. (2012). Machine Learning: A Probabilistic
Perspective. MIT Press.
Pal, N.R. and Pal, S.K. (1991). Image model, Poisson
distribution and object extraction. In J. Pattern
Recognit. Artif. Intell. V. 5(3). P. 459–483.
Plaut, E. (2018). From Principal Subspaces to Principal
Components with Linear Autoencoders. arXiv:
1804.10253.
Rodieck, R.W. (1998). The First Steps in Seeing. Sinauer.
Sunderland, MA.
Seitz, P., Theuwissen, A.J.P. (eds). (2011). Single-photon
imaging. Springer. Berlin, New York.
Streit, R.L. (2010). Poisson Point Processes. Imaging,
Tracking and Sensing. Springer. New York.
Generative Model for Autoencoders Learning by Image Sampling Representations
361
