
Underwater Wireless Sensor Networks: A Review
Mohammad Alsulami
1
, Rafaat Elfouly
2
and Reda Ammar
1
1
University of Connecticut, Storrs, CT, U.S.A.
2
Rhode Island College, Providence, RI, U.S.A.
Keywords:
Underwater Wireless Sensor Networks, Topologies, Deployment Strategies.
Abstract:
Several disciplines like science, engineering, and biological industry have been influenced by sensor networks
which have brought sensing and computation into reality. The possibility of having these sensors physically
assigned close to the target whose parameters are to be observed enables remote monitoring of various as-
pects of the physical world. Wireless channeling of information beneath the ocean or generally underwater
has provided the best technological ways of oceanic observations. Ocean bottoms have been monitored tra-
ditionally by deploying oceanographic sensors that obtain information at distinct and fixed ocean zones. The
oceanographic instruments are then recovered when the tasks are completed. This implies that data cannot
be monitored remotely since there is no collaborative communication of obtained data between the collection
point and the monitoring end. The data recorded can also be destroyed in case of a non-successful mission.
Oceanic observations have been made primarily possible by sensor networks carefully laid out under the wa-
ters. Underwater sensor networks can also be achieved wirelessly by establishing communications between
sensors and monitors without major cabling. These are known as Underwater Wireless Sensor Networks
(UWSNs). The UWSNs are comprised of various gadgets like vehicles that can operate autonomously under
the water and sensors. Deployment of these gadgets is done in targeted acoustic zones for the collection of
data and monitoring tasks. Bilateral communication is established between stations based on the ground and
different UWSNs nodes. This enables instantaneous remote monitoring and communication of information
from the specified oceanic zones to engineering personnel based on the shores. This paper looks at the various
aspects of Underwater Wireless Sensor Networks UWSNs including their importance, applications, network
architecture, requirements, and challenges and in their deployments.
1 INTRODUCTION AND
MOTIVATIONS
Emerging technologies around vehicles that are au-
tonomous and sensor deployment capabilities have
motivated the scheme of networking of sensors un-
der the water. Although this comes with communica-
tion problems, technology on acoustics can be ma-
nipulated to turn the scheme into practicality. For
short-range links, techniques of communication that
are interdependent have been advanced(Amoli, 2016).
These techniques include radio frequency, optical,
and communications that are electrostatic. These are
utilized for ranges between 1m to 10m to exploit the
high bandwidths involved. Large and highly pow-
ered antennas are required for such high bandwidth
signals because of their high attenuation tendencies.
Longer ranges of communication are affected mainly
by sounds of low speed, propagation of diverse paths
that vary in time, and bandwidths that are limited
and depend on distance. Propagation through diverse
paths varying in time coupled with the fact that sounds
have low speeds plus bandwidths that are limited and
dependent on distance brings ramifications of sub-
standard quality and high throughput(Felemban et al.,
2015; Lloret, 2013).
With advances in microelectromechanical devices,
sensors can be miniaturized with low power consump-
tion, thus increasing the capabilities of processing and
operation in different underwater scenarios. Integra-
tion of internet protocols with UWSNs architectures
can support M2M and IoT structures for up-to-date
monitoring of underwater events. The USWNs nodes
have also been found to be widely compatible with a
variety of sectors. However, the demands and con-
ditions of UWSNs that include accessibility, environ-
mental friendliness, endurance, privacy, and complex-
ity make the acoustic networks of UWSNs distinctive
and difficult to apply practically for developers. Mo-
202
Alsulami, M., Elfouly, R. and Ammar, R.
Underwater Wireless Sensor Networks: A Review.
DOI: 10.5220/0010970700003118
In Proceedings of the 11th International Conference on Sensor Networks (SENSORNETS 2022), pages 202-214
ISBN: 978-989-758-551-7; ISSN: 2184-4380
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

tivations for UWSNs include (Felemban et al., 2015;
Chandrasekhar et al., 2006):
• The architecture is self-diagnosing since interac-
tive anomalies can be sensed and corrected during
the acquisition of data(Lloret, 2013).
• Allows analyzing the data during data acqui-
sition; therefore, adjustments can be made on
sensors inputs and outputs for desired observa-
tions(Felemban et al., 2015; Amoli, 2016).
• Contrary to cables deployed underwater, UWSNs
offer a distributed structure that allows for ap-
plication to various frameworks. This makes
the UWSNs architectures appreciably flexible for
the provision of support in underwater surround-
ings(Chandrasekhar et al., 2006).
• The cost of deployment is low compared to cabled
sensor networks(Felemban et al., 2015).
UWSNs importance is widely seen in applications
that are swiftly gathering favor in the enablement
of progress around the disciplines of oceanic obser-
vations and monitoring systems. Further, UWSNs
has gained ground in surveillance of deep seas,
earthquake and tsunami monitoring and forecasting,
aquatic animal’s activities and plants tracking, re-
connaissance and surveillance by the military, ex-
traction of gas and oil, monitoring of leaking and
spillage of oils, detection of mines and also in fish-
eries(Felemban et al., 2015; Amoli, 2016; Chan-
drasekhar et al., 2006). These applications can be
classified in terms of monitoring aspects, military as-
pects, navigation, and forecasting of disaster occur-
rences and their management. These classes of ap-
plication can then be classified into respective sub-
classes(Lloret, 2013). Monitoring underwater activi-
ties involves deploying sensors networked to track the
surrounding environment related to its properties and
features of interest. Here, the tangible and substan-
tial environment is monitored. This monitoring ap-
proach of classification can also be subdivided into
monitoring the quality of water, aquatic life moni-
toring, and sub-water exploration monitoring. The
quality of water is monitored with regard to the well-
being of aquatic life such as fish and other living
things above the water. Monitoring of underwater en-
vironment can range from applications to large oceans
to canals. The farming of fish is considered one of
the best sources of economic growth(Felemban et al.,
2015; Amoli, 2016; Chandrasekhar et al., 2006).
Thus there is a need for uncompromising monitor-
ing of the fish habitats for a near-perfect living condi-
tion. Deployment of sensors has been accomplished
to monitor the environmental conditions of individ-
ual fish species to create a conducive environment for
fish farming. In (Felemban et al., 2015; Lloret, 2013),
UWSNs have been utilized to assess the quantity of
food that has not been eaten and the capital waste on
the farm(Felemban et al., 2015). The design has been
deployed for testing in fish farming of marine flora
and fauna. A group of wireless network of sensors
was used for precise analytical monitoring of farm
water pollution. Applications have also been devel-
oped for trout farming to keep track of water quality
in the pools. The chemical composition of the water
is monitored for a given period, and an algorithm is
deployed to show the input-output information for a
given number of pools(Felemban et al., 2015; Amoli,
2016; Chandrasekhar et al., 2006).
The algorithm is used to provide alerts in case the
measured conditions surpass the set threshold. These
conditions include conductivity of electricity, oxygen,
and ammonium nitrogen levels. Autonomous vehi-
cles can also be integrated with sensors to collect sam-
ples of water from reservoirs of drinking water. The
processed information is then transmitted to a loca-
tion remotely(Lloret, 2013; Felemban et al., 2015).
UWSNs can also be applied in monitoring river pH
composition by utilizing sensor nodes. These nodes
are made to process the collected data. A compar-
ison is then made between the threshold parameter
values and the collected data. Wireless modules are
then utilized to transmit the processed information to
a remotely located station. Other parameters that can
be monitored in water include temperature, oxygen
dissolved, and pollution(Amoli, 2016). Temperature
sensors are deployed under the water, and the val-
ues are communicated wirelessly and then displayed
in tabular and graphical presentations. The visualiza-
tion of the collected information from under the wa-
ter can be through web applications or cellular plat-
forms. Mostly, floating nodes with GPRS convey the
underwater information to a remotely located station.
Sensors can be deployed under the water to monitor
pollutants such as wreckages and spillages to monitor
water pollution(Chandrasekhar et al., 2006; Felem-
ban et al., 2015). Monitoring of water habitats in-
cludes applying UWSNs to monitor the coral reefs or
any other plants under the water and monitoring the
activities of marine animals/organisms(Lloret, 2013;
Chandrasekhar et al., 2006).
UWSNs can be applied to monitoring marine ac-
tivities by monitoring the surrounding environment
of the marine organisms through acoustic device net-
works. To transmit the marine environmental con-
ditions, information from one sensor to another can
be accomplished by utilizing TDMA protocols. The
obtained data can then be used to develop ecosys-
tem models capable of predicting changes in the un-
Underwater Wireless Sensor Networks: A Review
203

derwater environment and changes in climate con-
ditions(Almutairi and Mahfoudh, 2017; Felemban
et al., 2015). Currently, deployment of such a sys-
tem has been accomplished in Queensland, Australia,
with sensing capabilities, wireless conveyance of in-
formation to a ground remotely located station, visu-
alization of measured data, and an alert system in case
of anomalies have been deployed. In this scheme, a
rough and ready system that uses a cluster or a topol-
ogy of stars for direct transmission of information to
a buoyant gateway has been used. Data is then trans-
mitted remotely to a control station from the gate-
way. Seashells are also monitored as part of marine
habitat in China, such as Zhejiang province(Almutairi
and Mahfoudh, 2017). UWSNs have an application
in monitoring seismic activities such as oil extrac-
tion from fields under the water(Aldosari et al., 2020).
Fluctuation of the oil reservoir is studied over time
in a 4-D model for evaluation of the performance of
the oil fields and application of ad hoc interventions.
Traditionally, onshore fields are continuously moni-
tored through daily, quarterly, or annual surveillance
through permanent instruments(Aldosari et al., 2020;
Almutairi and Mahfoudh, 2017). Conversely, sub-
merged oil fields are more demanding because the de-
ployment of sensors is not presently permanent in the
oil fields underwater. Therefore, monitoring of tec-
tonic fields is accomplished using ships. The ships are
fixed with an array of sonar as sensors and actuators
made of air cannons(Aldosari et al., 2020; Almutairi
and Mahfoudh, 2017). Evaluating such submerged oil
fields is highly costly and can only be applied to sub-
merged fields less frequently. Multiple channels of
tectonic data are collected using individual sensors. A
single sensor is designed to collect 24 bits per channel
at a frequency of 500 Hertz. Data is captured when
an event of seismic nature occurs, consequently giv-
ing 60-kilo bytes of features of data for every sensor
used in a tectonic event. The data rate of 5-kilo bytes
per second is involved for 120s per sensor to transmit
the information for a single hop. For oil fields that
cover the typical zones of 8km by 8km, sensors are
deployed approximately at a 50m grid(Aldosari et al.,
2020), implying that a highly larger number of sen-
sors are utilized to provide total coverage. A layered
communication channel is also implied because some
nodes of sensors are connected through communica-
tion media that are non-acoustic. Buoys augmented
with high-speed Radiofrequency capabilities are uti-
lized for the wireless transmission of data. Supern-
odes can also be implemented for a five-by-five net-
work segment. All sensors are in the vicinity of two
jumps around a supernode, and retrieval of all infor-
mation can be accomplished within an hour(Aldosari
et al., 2020; Almutairi and Mahfoudh, 2017).
Application of UWSNs in exploration involves in-
spection and survey of a substantial amount of sub-
merged minerals(Almutairi and Mahfoudh, 2017; Al-
dosari et al., 2020). The exploration under the wa-
ter can further be classified into exploring innate re-
sources and monitoring of pipelines and cables for
gas and oil exploration under the water. UWSNs have
been developed in (Felemban et al., 2015) for the lo-
cation and investigation of cast iron crust(Almutairi
and Mahfoudh, 2017). An autonomous underwater
vehicle that is operated remotely has been utilized on-
site to explore the crust minerals attaining a depth of
3000 meters under the ocean surface. The vehicle is
augmented with a system that can do mapping of the
ocean bed. Therefore, it is an emerging technology
to combine an acoustic network of sensors and re-
motely operated underwater vehicles to excavate min-
erals buried deep into the ocean beds(Almutairi and
Mahfoudh, 2017; Aldosari et al., 2020).
Underwater sensor systems can be utilized in the
detection of various facets of applications in military
aspects. Here, AUVs are equipped with sonars for
imaging, detectors for metals, and cameras for mis-
sions in detecting submerged ocean mines(Almutairi
and Mahfoudh, 2017; Felemban et al., 2015). This
setup is also used for port securities(Aldosari et al.,
2020; Lloret, 2013). Submarines are usually aug-
mented with several underwater architectures of sen-
sors to aid in surveillance and monitoring. Detect-
ing submerged mines ensures that military ships ex-
ecute risk-free voyages(Khan et al., 2021; Aldosari
et al., 2020; Chandrasekhar et al., 2006). Since the
mines are composed of unique materials that are fer-
rous, they can be separated from clutter under the
ocean since these clutters are usually nonmetallic.
The application of UWSNs in surveillance encom-
passes detection of foreign intrusion in demarcated
international water spaces such as warships from a
defined enemy. The UWSNs not only assist in detec-
tion and surveillance but can also be utilized for nav-
igation purposes. Since the underwater topology is
exceedingly uneven, arbitrary, untraversed, and expo-
nentially increasing in depth, UWSNs come in handy
in navigation. This provision of navigation capabil-
ity can be extended to civilian ships, boats, and even
fishing vessels. Because of the different transmis-
sion mediums involved, the navigation devices used
on land cannot be used under the sea or ocean, further
cementing the importance of a setup of an underwater
network of sensors(Khan et al., 2021; Almutairi and
Mahfoudh, 2017).
SENSORNETS 2022 - 11th International Conference on Sensor Networks
204
2 UNDERWATER WIRELESS
SENSOR NETWORKS
ARCHITECTURES
Generally, the performance of acoustic networks is
dependent on the design of the topology. Effective
topology increases the reliability of the network of the
sensors and vice versa. Additionally, energy is con-
served in an efficient topology of underwater acoustic
sensors. Therefore, an optimized network model of
UWSNs must be adopted depending on the area of
deployment(Alharbi et al., 2015). Different methods
of classifying UWSNs include classification accord-
ing to the mobility of the nodes, i.e., half-static, fully
static, and dynamic models, and classification accord-
ing to node depth, i.e., 2D model and 3D model struc-
tures(He et al., 2018; Alsulami et al., 2020b). Since
attenuation is experienced underwater during radio
frequencies, communication between UWSNs must
be accomplished using acoustic mode. The acoustic
linking has been optimized over the years to mitigate
challenges such as delays that are longer, high dispar-
ities, and sensing abilities that are unstable(Alharbi
et al., 2014; Alsulami et al., 2019). Therefore, the
development of efficient topology of sensor networks
has been influenced by motivating factors such as dif-
ficulties presented by compounded underwater sur-
roundings and the need for sensing in marine mon-
itoring applications. In the process of development
for the progress of the 2D model environment to
3D structures evolution, a myriad of UWSNs were
designed with regard to different applications after
proper optimization techniques have been utilized to
improve the performance of the topology configura-
tion. Hence, formally and generally, it is not wrong to
classify the topologies into 2D, 3D, 4D, and UWSNs
based on vehicles operating autonomously underwa-
ter(He et al., 2018).
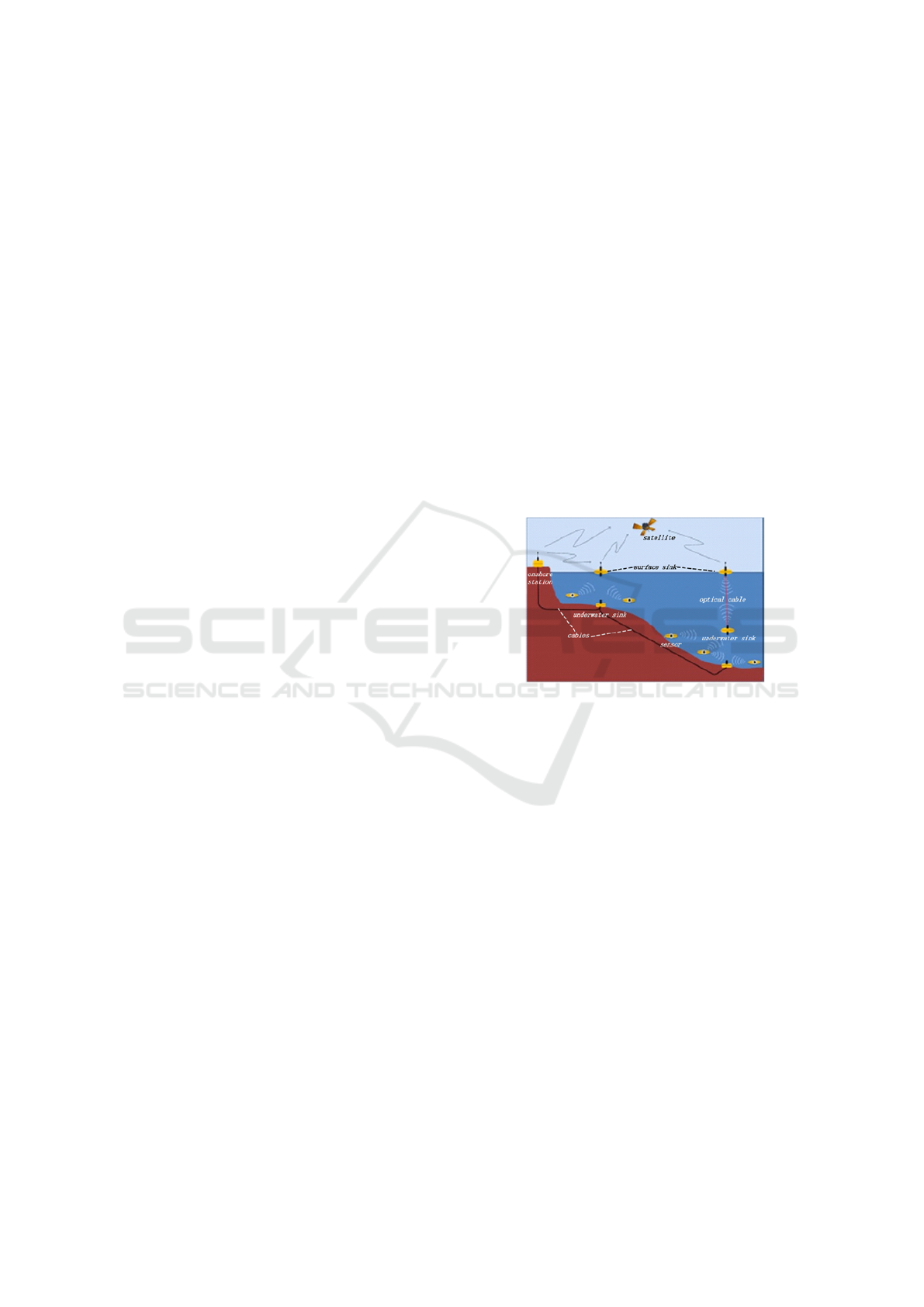
2.1 2D Network Models
In an ordinary 2D topology, the nodes of the sen-
sors, which have a smaller size due to unique un-
derwater surroundings, are set upon the ocean bed.
The 2D structure models can be classified into iso-
morphic and heterogeneous topologies. Initially, ma-
rine investigations are directed towards the coastal ar-
eas. For these observations of marine interests, sen-
sors of similar functionalities are placed on the ocean
bed or seabed to extract data and detection function-
alities. Sinks on the surface can be utilized for the
acquisition of information from nodes under the wa-
ter. This is made possible by an acoustic channel
link. Sinks under the water acquire information from
deep-sea sensors and relay it to ground-based con-
trol stations. Therefore, it is necessary to provide
sinks under the water and transceivers that are acous-
tic. These transceivers should be vertical and hori-
zontal. The horizontal transceivers have the purpose
of communicating with nodes regarding data collec-
tion or command provision as they are being received
from the control station offshore. The data is sent
to the control station on land using the transceivers
that are vertical. The vertical transmitter receivers
must be of sufficient range since the ocean depths
are large. The sinks placed on the surface are sup-
plied with RF transmitters of a wide range and also
acoustic transmitter-receivers for the management of
communications that are parallel by design. Models
that allow for the application of two-dimensional de-
tection at ocean beds with similar detection capabil-
ities in every sensor placed for detection are known
as isomorphic models, as shown in figure 1 (He et al.,
2018). In the isomorphic model, data is sent to the
Figure 1: A 2D architecture of isomorphic model.
sinks from the sensors. From the sinks, the infor-
mation is then relayed to the control station located
on land. The isomorphic structure is best applied
for detection in shallow areas because of communica-
tion limitations in sensor distances(Alhumyani et al.,
2015; He et al., 2018). To improve model perfor-
mance for marine areas far from the coastal lines, ca-
ble tethering is utilized to connect sinks placed at the
surface and sinks placed under the water. This setup
brings about convenience and improves communica-
tion reliability under the water. Tethering also guaran-
tees the exchange of information in a reliable fashion
between sensors with a simple, convenient deploy-
ment(He et al., 2018). However, the model is suitable
only for comparatively stable networks. This is only
possible using routing structures that do not demand
time to time rationalization for Shallow Ocean water
surrounding.
Additionally, the model is optimized for localized
monitoring of the environment and cannot perform
well for spaces of large expanse. It is therefore in-
effective in areas deemed as deep regions of ocean or
Underwater Wireless Sensor Networks: A Review
205

sea. For the sinks under the water, the collected in-
formation by the sensors is often relayed by utilizing
multi-jump routing. In this model, there are sensors
close to the sinks that are submerged under the wa-
ter(Khan et al., 2021). These sensors are designed to
transmit the collected information and also function
as communication nodes during heavy loads. Due to
the homogeneous capacity of isomorphic model sen-
sors, there is a high-energy consumption by the nodes
and thus a high failure rate. The intersymbol interfer-
ence phenomenon is also likely to occur due to several
sensors sending data at similar times(Felemban et al.,
2015; He et al., 2018). It is inconvenient to deploy
sinks in some regions. Therefore sensors located at
the bottom of the sea are constrained to relay infor-
mation to the sinks at the surface by utilizing audial
communications. This results in high energy demand
by the nodes(He et al., 2018). To solve the above
problems and challenges, a heterogeneous model can
be utilized for such regions. The heterogonous model
incorporates aquatic sensing and a gateway configu-
ration of center nodes known as hub sensor nodes.
In addition to monitoring the ocean bed, the gate-
way is also utilized to transmit the collected infor-
mation to the sinks at the surface. The gateway has
acoustic transmitter-receiver modules, namely, hori-
zontal and vertical structures. The horizontal config-
uration enables interaction among the nodes in a clus-
ter. It releases directive information on configuration,
and at the same time, it collects the data sensed(Khan
et al., 2021; Aldosari et al., 2020). The data is sent to
the control station on land using the transceivers that
are vertical. Therefore, this model solves the issue
of rapid consumption of energy in the sensor nodes
for such a configuration. The configuration also re-
lieves the cost of deploying wired cables and there-
fore utilizes the flexible wireless transmission of data.
It is essential to consider the gateway number and
the position of the aquatic clusters when constructing
this model. Additionally, there is a resultant interfer-
ence and decrease in transmission of standard packets
due to the execution of a horizontal collection of in-
formation and vertical forwarding of data at similar
times(He et al., 2018).
2.1.1 Mechanisms of Configuration in 2D
Models
The network configuration is perceived here as the
placement of sensors under the sea or ocean waters to
construct a reliable and stable topology. The deploy-
ment processes in the 2D model configuration are the
deterministic and random approaches(Alsulami et al.,
2020b).
• Deterministic Approach
In the deterministic deployment approach, the state
of the environment being monitored is considered,
and the positions of sensors are organized reason-
ably. Arranging the sensors well involves consis-
tently deploying these sensors for complete cover-
ages and deploying non consistently for occasion-
oriented coverages(Alsulami et al., 2019). For com-
plete coverage of the area being monitored using
a minimum number of sensors, they should be de-
ployed uniformly to minimize superimposed areas
between the sensors. Triangular configuration de-
ployment techniques have been proposed in litera-
ture where the two-dimensional monitored regions
are split into various equal-sided triangles(Alhumyani
et al., 2015). Deployment of sensors is then per-
formed at triangle vertices to realize enormous cover-
age under minimum sensors. The sides of the equal-
sided triangles can be adjusted to achieve maximum
coverage with the assurance that minimal overlapping
regions between sensors will occur(Alsulami et al.,
2020a). Grids of hexagonal or square shapes have
also been proposed as construction structures for two-
dimensional networks. These can be applied to spa-
tially and open deterministic planes of 2Ds. Sensors
can be deployed non-uniformly to tackle the problem
of amorphous areas with several obstacles(He et al.,
2018).
• Random Approach
Random approach deployment is utilized when the
marine surrounding being monitored has a wide vari-
ation of conditions that are not easy to explore com-
pletely. This type of deployment involves sparsely
deploying nodes at distinct locations and intensively
deploying at a large scale(He et al., 2018; Alsulami
et al., 2020a). Sensors are typically deployed ran-
domly in harsh underwater environments by throw-
ing them out of a ship or plane. Algorithms utilized
in deploying randomly consider coverage of network
and connectivity for the realization of complete sen-
sor coverage. However, more sensors are required
for complete coverage with a resultant increase in the
cost of deployment and maintenance(Alsulami et al.,
2020b). Only key regions must be considered for effi-
cient coverage that guarantees less number of utilized
sensors(Alsulami et al., 2020a).
• Clustered Approach Deployment
Here, clustering of sensors is done based on a single-
hop from a gateway made of cluster nodes to a sink
on the ocean surface. Sensors can also be clustered
in a multi-jump communication method. In clustered
approach, algorithms are utilized for the placement of
sensors according to regular grids. This technique of
SENSORNETS 2022 - 11th International Conference on Sensor Networks
206

deployment cannot, therefore, be applied to complex
environments(He et al., 2018; Alsulami et al., 2021).
In this approach, the selection of position is taken into
consideration when clustering unrelated sensor nodes.
Optimization of the position and quantity of nodes
is easy since there is no distinct definition of topol-
ogy(Alsulami et al., 2020a).
2.1.2 Strategies of Optimization in 2D Models
Mostly, the methods applied for optimization to im-
prove execution in 2D models consider the adjust-
ment of power, modeling of the graphics, and nu-
merous coverages(He et al., 2018). This enhances
the network’s performance by improving connectiv-
ity, coverage and minimizing the required quantity of
nodes. The energy or power consumption pertaining
to the network can also be reduced by optimization
techniques that consider the following: control of fre-
quency, optimization through interpolation, and clas-
sification of clusters(Alharbi et al., 2015). Delay of
transmission is also reduced, and data quality is im-
proved when execution optimization techniques are
utilized. The aim of optimizing the topology is to
stabilize the network and enhance its performance.
These optimization techniques seek to improve the
network parameters like the interval from one node
to the next, the number of nodes, and how the nodes
are linked(Alsulami et al., 2019).
2.2 3D Network Models
In this model, nodes are deployed in a floating manner
at varying ocean depths(Alhumyani et al., 2015). The
nodes are anchored at the bottom of the ocean with
wires attached to the anchors to control node depths.
Buoys that are placed horizontally on a plane can also
be utilized in controlling the node depths. The 3D
network structure can be classified into isomorphic
and heterogeneous. The isomorphic can further be
sub-classified into dynamic and static design mod-
els(Alhumyani et al., 2015). The static structure de-
signs are placed at various depths to cover large areas
of the region being monitored. Connecting pressure-
sensitive nodes accomplish the varying depth to an
anchor chain or a buoy through a cable whose length
can be adjusted. Anchoring the buoys to the ocean
bottoms mitigates the challenges of exposure to en-
emy targets and navigation problems. Deployment in
the 3D structure of the isomorphic model is as shown
in figure 2 (He et al., 2018; Ibrahim et al., 2009; Al-
humyani et al., 2015).
The challenges experienced by the 2D models
are avoided in 3D structures, enabling deployment in
complex harsh, and extremely deep regions of the sea
Figure 2: A 3D architecture of UWSNs (Bhaskarwar and
Pete, 2021; He et al., 2018).
or ocean(He et al., 2018; Alsulami et al., 2019). Some
of the drawbacks of 3D environments include: the po-
sitions to anchor the sensors must be initially deter-
mined in the early stages of deployment, the length of
the cable limits the distance of adjustment in the verti-
cal orientation, the energy demand by the sensors de-
termines how frequently the adjustments of the depths
should be done. The anchors that have been used to
hoist the sensors have also been found to be sensitive
to currents from the ocean, basin-scale vortex, plus
various factors of the environment. Quick energy con-
sumption is also experienced when sending data from
sensors at the bottom of the ocean to sinks at the sur-
face because multi-jump routing and nodes of isomor-
phic structures are utilized as relays(Bhaskarwar and
Pete, 2021; He et al., 2018).
3D UWSN model outputs are improved by
augmenting their performance with vehicles
operating autonomously underwater known as
AUVs(Bhaskarwar and Pete, 2021). Dynamic 3D
structure model based on AUVs is as shown in figure
3 (He et al., 2018).
Figure 3: Dynamic 3D Model based on AUVs (Bhaskarwar
and Pete, 2021).
The AUVs are used for supporting the GPS mod-
ules for tracking of position. AUVs perform analy-
sis of the flow rate with an allowance of controllable
operations since they have a high computation capac-
ity. The AUVs have an adjustable speed of movement
and position. This model is challenging to apply in
large-scale proportions because of the high cost in-
Underwater Wireless Sensor Networks: A Review
207

volved. Consequently, 3D models that are dynamic
and heterogeneous have been proposed and designed
to lower the costs of constructing UWSNs.
2.2.1 Mechanisms of Configuration in 3D
Models
There are different strategies of configuration for var-
ious types of 3D models. The techniques of de-
ployment can be classified based on node character-
istics. For three-dimensional models that are con-
sidered static, anchoring of every sensor is done on
the ocean bead, and there is a restriction of indepen-
dent movement(Alsulami et al., 2019). The deploy-
ment methods can be classified as deterministic, self-
adaptive, and force-based virtual deployment (Zhang
et al., 2019).
• Deterministic Approach
This deployment can be classified as uniform and
non-consistent. It is necessary that UWSNs give a 3D
monitoring of the underwater surrounding, but there
are autonomous movement limitations because of en-
ergy requirements. A minimum number of sensors
should also be utilized to realize maximum place-
ment in a large area(Zhang et al., 2019; Alhumyani
et al., 2015). Therefore, it has been proposed that a
sequence of polyhedral top-up designs with regards
to conjecture by Kelvin be utilized(Alhumyani et al.,
2015).
• Self-adaptive Approach
This deployment technique involves random anchor-
ing of sensors on the bottom of the sea. The depth
of the sensors is also determined randomly(Alsulami
et al., 2020a). The adjustment made on the anchor
length selects the desired depths of the sensors. Ev-
ery individual sensor then relays its ultimate location
to a station onshore. Algorithms have been proposed
under this approach, where the clustering of sensors
is done by controlling the depth of sinking of indi-
vidual sensors(Alsulami et al., 2019). The algorithm
works along with the idea that coverage under 3D
structure ensures continuous interconnection between
the sensors. For the avoidance of superimposition in
horizontal regions, preliminary planning of the posi-
tion of sensors is needed. Since this deployment is
random-based, numerous replicated sensors should be
distributed so that the region being monitored can be
covered completely(Zhang et al., 2019; Alhumyani
et al., 2015).
3 APPLICATIONS OF UWSNs
TECHNOLOGY
UWSN technology finds its applications in many ar-
eas grouped into three categories: Scientific, Indus-
trial, and Security applications. The underwater sen-
sor design ranges from simple to complex, while the
prices range from few dollars to thousands of dollars
depending on the monitored parameter. Sensors used
to measure pressure, light penetration, and tempera-
ture are relatively low-priced. On the other hand, sen-
sors used in applications such as estimating the con-
centration of chlorophyll, CO
2
monitoring, and de-
tecting underwater objects use more complex sensor
technology and hence are more expensive(Heidemann
et al., 2012; Lloret, 2013). Figure 4 gives a summary
of the applications of UWSN under each of the three
categories stated above:
Figure 4: Applications of UWSN Technology (Heidemann
et al., 2012).
Depending on the target data to be collected, de-
ployment of underwater sensor networks is catego-
rized as discussed below:
• Static or Mobile Mode
Static nodes are attached to anchored buoys or at-
tached to the seafloor and remain there collecting and
transmitting information back to the monitoring sta-
tions(Ibrahim et al., 2009; Alhumyani et al., 2015).
On the other hand, mobile nodes are mounted on au-
tonomous underwater vehicles (AUVs)5, gliders, or
drifters(Heidemann et al., 2012). In doing this, one
can monitor data over a large area using the same
hardware. Since the mobile nodes are needed to cover
a more extensive topology, they consume more energy
during the data collection and relay process.
• Short-term and Long-term Monitoring
Deployment of underwater sensors can be for short
periods ranging from a few hours to a day or for
more extended periods ranging from a few months
to several years. Most underwater deployments
happen on a short-term basis due to the harsh aquatic
environment(Heidemann et al., 2012). After a certain
SENSORNETS 2022 - 11th International Conference on Sensor Networks
208

Figure 5: Autonomous Underwater Vehicle – AUV (Blid-
berg, 2001).
period of operation, there arises the need to service
the equipment and allow for recharging, especially
for mobile nodes that run on battery power(Alsulami
et al., 2020a).
The above factors affect the design and opera-
tion of the various equipment deployed for underwa-
ter sensing applications. The choice between static
or mobile deployments and the length of the sensors’
operation period before any service is required varies
depending on the specific application the UWSN is
applied. This next section discusses the various appli-
cations of UWSNs across multiple sectors.
3.1 Scientific Applications and Research
Water covers over 70% of the earth’s sur-
face(Felemban et al., 2015). These parts of the
earth underwater remain hugely unexplored and
contain vast resources and data awaiting discovery.
Applications of UWSNs in scientific research revolve
around environmental monitoring, ocean sampling,
and monitoring of biological activities on the ocean
floor(Lloret, 2013; Heidemann et al., 2012).
3.1.1 Environmental and Marine Life
Monitoring
Environmental and marine life monitoring involves
monitoring the underwater environment, various ob-
jects of interest, and marine life. Ecological mon-
itoring is split into the tracking of the physical pa-
rameters of the water to determine its quality, mon-
itoring of marine life and their habitats, and perfor-
mance of underwater exploration activities for discov-
ery or research. Tracking the ocean water quality is
mainly geared towards assessing the chemical and bi-
ological waste deposited on the ocean floor(Collins,
2013). The water’s oxygen levels, temperature, and
pressure are also measured, and the data is sent to on-
shore monitoring stations for further analysis. Moni-
toring the quality of water ensures that aquatic life is
not affected by any human activities(Kiranmayi and
Kathirvel, 2015).
Some of the most common pollution instances in-
clude oil spillages, chemical and nuclear pollution
from facilities close to water bodies that use the wa-
ter in their operations. UWSNs make identifying any
pollution cases easier than manual methods by en-
abling the monitoring stations to get real-time infor-
mation(Kiranmayi and Kathirvel, 2015). The amount
of aquatic life that has been affected can be accu-
rately determined hence enabling timely planning of
countermeasures to salvage the situation. Noticing a
change in some of the nominal operating conditions
of the ocean happens fast, and the possible cause is
identified before any harm to human or aquatic life
happens(Kiranmayi and Kathirvel, 2015). The under-
water sensors deployed for such applications are pri-
marily static(Bradbeer et al., 2007).
The aim of monitoring aquatic life such as fish,
mammals, and microorganisms is to observe, study,
and understand their behavior hence further expand
the current scientific knowledge base(Kiranmayi and
Kathirvel, 2015). The living environment of these un-
derwater creatures is monitored and analyzed. Any
human activities in the vicinity of the study area
are also monitored to determine whether they impact
aquatic life in any way(Felemban et al., 2015; Kiran-
mayi and Kathirvel, 2015). Such systems capture vi-
sual and technical data of the marine organisms and
transmit it wirelessly to a control and monitoring cen-
ter where the data is analyzed and triggers an alert
should an unusual occurrence be detected(Collins,
2013).
3.1.2 Ocean Sampling
Ocean sampling involves the monitoring of under-
water phenomena with the aim of scientific study.
In this case, the underwater sensors are mounted on
AUVs that move around unexplored regions of the
ocean surface. The area covered by each vehicle is
approximately 500 square meters for every deploy-
ment(Fattah et al., 2020a).
3.1.3 Coral Reefs Study
Coral reefs are underwater ecosystems that are built
by microorganisms that live in the water. They are
studied to check how human activity impacts them. A
lot of data is collected and incorporated into simula-
tions tools. One can project the impact of any change
in the ocean conditions on the thriving of these under-
water ecosystems(Kiranmayi and Kathirvel, 2015).
Both static, as well as mobile nodes are deployed for
Underwater Wireless Sensor Networks: A Review
209

such applications. The static nodes are used to col-
lect data such as temperature and images of the coral
reefs at certain strategic positions of the reef(Fattah
et al., 2020a; Lloret, 2013). AUVs, which are the mo-
bile nodes, are used to collect information from the
stationary nodes and relay it to surface buoy nodes
for transmission to the monitoring and control cen-
ters at the shore. The static nodes are built to with-
stand the harsh underwater environment, while the
mobile nodes are limited by powering issues (batter-
ies) and shorter lifetimes(Kiranmayi and Kathirvel,
2015). Mobile nodes are hence not used for long ex-
cursion periods due to these limitations.
3.2 Industrial
3.2.1 Mineral Exploration
Underwater sensors are used during the exploration
of oil and gas deposits on the floor of the ocean.
Doing this enables faster and more accurate explo-
ration to establish the presence and viability of such
resources(Maeda et al., 2011). UWSN technology
is also used to monitor and control underwater rigs
to ensure effective operation with minimum pollu-
tion to the surrounding environment. The other min-
eral that has attracted the interest of researchers in re-
cent times is manganese crust(Lloret, 2013; Felemban
et al., 2015; Kiranmayi and Kathirvel, 2015). Under-
water sensor technology has been deployed to iden-
tify, locate and map these underwater deposits. AUVs
mounted with optical and acoustic modules are used
for such applications, facilitating significant area cov-
erage during exploration(Maeda et al., 2011). These
AUVs identify, map and monitor these manganese de-
posits to depths of 3000m below the water surface
(Felemban et al., 2015).
3.2.2 Pipeline Monitoring
UWSNs have, in recent times, been incorpo-
rated in the monitoring of underwater oil and gas
pipelines(Jacobi and Karimanzira, 2013). This is
done when oil and gas are extracted from the ocean
floor and transferred to the shore using pipelines.
Pipelines are also used to interconnect different con-
tinents, making them a critical infrastructure that
needs continuous monitoring(Jassim and Abdelka-
reem, 2020). The health of a vast pipeline can be
determined in a short period of time compared to
when manual methods are used. In doing this, some-
body can take quick remedial actions if a fault is no-
ticed(Jassim and Abdelkareem, 2020; Fattah et al.,
2020a).
3.2.3 Monitoring of Commercial Fisheries
UWSNs are used in monitoring commercial fishing
activities in fish farms. Fish farming is a most de-
manding activity that calls for continuous monitoring
of the fishes’ habitat to guarantee maximum produc-
tion. In most cases, the fish live in a closed environ-
ment hence calling for close monitoring of their habi-
tat to ensure that all the living conditions for the fish
are optimally maintained(Chang et al., 2016; Fattah
et al., 2020a). The parameters monitored are tem-
perature, water pH, NH4 content, amount of uneaten
feed, and fecal waste from the fish. This is done to de-
termine the quality of the water and determine when
a change is needed(Felemban et al., 2015). UWSN
technology allows for easy management of huge fish
farms when compared to traditional methods. Large
amounts of data are collected and stored to help make
better decisions in the future to ensure the productiv-
ity of these farms. With the continued flow of real-
time data from UWSNs at their disposal, one is guar-
anteed to make the best decisions to ensure the com-
mercial viability of a fish farm(Felemban et al., 2015;
Lloret, 2013).
3.3 Security Applications
Applications of UWSNs involve the use of these sen-
sors for monitoring the coastline activities and iden-
tifying any unwanted or unpermitted battleships or
submarines in the vicinity(Jacobi and Karimanzira,
2013; Felemban et al., 2015; Zwanzig, 2018). Any
potential enemies are determined in advance and neu-
tralized before launching an attack, and the secu-
rity teams can plan for offenses to neutralize the en-
emy before they strike. SeaWeb was one of the
earliest underwater communication technology de-
ployed by the military for detecting and communicat-
ing with submarines(Heidemann et al., 2012). The
mode of communication underwater is usually lim-
ited to short distances compared to terrestrial com-
munication. Current technological advances are look-
ing into how this communication can be expanded
since most parts of the underwater world remain un-
explored and unexploited(Felemban et al., 2015). Op-
tical and acoustic sensors are used in mine detection
under the water. Similar to terrestrial mines, under-
water mines pose a threat to aquatic activities carried
out by security agencies(Dong et al., 2015). Hence,
underwater sensor technologies help avert loss of life
when used for reconnaissance activities to identify
and neutralize any hidden threats positioned on the
seafloor(Zwanzig, 2018).
SENSORNETS 2022 - 11th International Conference on Sensor Networks
210

3.3.1 Disaster Identification and Management
Tsunamis have been a natural disaster that has posed
considerable harm to human life and activities car-
ried out close to seas and oceans. UWSNs are de-
ployed to monitor the conditions of the ocean floor,
and if some seismic activities are noted, the sensors
send a warning to the shore stations. This informa-
tion can then be relayed to those near the seas, advis-
ing them to move to higher grounds(Alsulami et al.,
2019; Zwanzig, 2018). In doing this, damage to prop-
erty and loss of life is averted. Underwater volcanos
and earthquakes are also monitored to gather informa-
tion on any upcoming or expected seismic activities.
At times, the ruthless behavior of oceans limits the
traditional methods of gathering information and ren-
ders some areas of the sea inaccessible. This is where
the underwater sensor technology comes in handy to
guarantee continued monitoring of the oceanic con-
ditions despite the rough nature of the ocean wa-
ters(Dong et al., 2015). In doing this, disasters are
averted through early detection and relaying of infor-
mation(Lloret, 2013).
One of the adverse effects of global warming has
been increased flooding around the world. This has
led to the loss of life and destruction of property when
the floods strike unexpectedly. UWSN technology
has found an application in monitoring such events
to ensure that timely alerts are sent out, saving lives
and reducing the destruction of property(Jassim and
Abdelkareem, 2020; Amoli, 2016). Aquatic vitals
are monitored by some stationary nodes then trans-
mitted to a remote shore station for analysis of any
impending floods. Some of the parameters monitored
include water levels, thrust, and intensity of flow.
Other information that is monitored includes temper-
ature, humidity, and amount of precipitation(Arima
et al., 2014). After gathering this information, pre-
diction tools are used to determine whether a flood
is imminent and when one might occur. This infor-
mation guides emergency services on any evacuation
that needs to be done and when it should be done.
Other forms of disasters that may occur can be artifi-
cial, such as oil spillages(Arima et al., 2014; Felem-
ban et al., 2015). These are bound to cause ecologi-
cal instabilities in life on and under the water if not
adequately mitigated(Amoli, 2016; Alsulami et al.,
2020a; Dong et al., 2015).
3.3.2 Assisted Navigation
In assisted navigation, modern-day ships can get in-
formation about impending threats such as rocks,
shoals, and submerged vehicles(Gallagher et al.,
2016). This helps the crew plan for their voyages
and avoid accidents such as what begot the titanic
from happening. Traditional systems would depend
on the manual observation of threats then communi-
cating them to the ship’s navigation team for action.
Any miscalculation of danger would tend to be fatal,
as was the case with the titanic(Gallagher et al., 2016;
Lee et al., 2004; Felemban et al., 2015).
4 CHALLENGES AND
LIMITATIONS OF UWSNs
Although UWSNs have grown in the application, they
present several limitations in their deployment. These
challenges require to be addressed by research to con-
tinuously improve the reliability, efficiency, and ap-
plicability of these UWSNs(Akyildiz et al., 2005).
The challenges and limitations of UWSNs include
Limited Bandwidth, Propagation delay, Delay Vari-
ance, Link reliability, complex acoustic environment,
common standard and interface, sensor heterogene-
ity, hardware-related limitations, communication, and
visualization challenges(Fattah et al., 2020b). To
clearly understand the challenges of UWSNs, it is im-
portant to study the differences that these networks
have when compared to terrestrial systems(Ryecroft
et al., 2018). Firstly, underwater sensor networks
are expensive when compared to terrestrial networks.
The high cost is due to the complex design of un-
derwater transceivers and the protection hardware re-
quired for protection against the harsh environmen-
tal conditions that underwater systems are exposed
to(Akyildiz et al., 2005). Secondly, underwater wire-
less sensor nodes are sparsely deployed when com-
pared to terrestrial nodes (Akyildiz et al., 2005). This
sparse deployment is occasioned by the high cost of
the underwater sensor nodes and the harsh deploy-
ment environment(Ryecroft et al., 2018). In terms
of power requirements, UWSNs require more power
than their terrestrial counterparts. USWNs require
complex signal processing at the transceivers to com-
pensate for noise and signal loss along the underwater
transmission channel(Alsulami et al., 2019; Bhanu-
mathi et al., 2019).
Due to intermittency of data transition in under-
water systems, USWNs require additional memory
for caching to mitigate the intermittency(Iqbal and
Lee, 2015; Fattah et al., 2020b). On the other hand,
terrestrial systems do not require huge memory for
caching because data transmission is stable. Addi-
tionally, data from underwater sensor networks are
more spatially correlated than that of terrestrial sen-
sor networks(Lloret, 2013; Akyildiz et al., 2005). The
reason for this is the large distances between sensor
Underwater Wireless Sensor Networks: A Review
211

nodes in underwater sensor networks (Akyildiz et al.,
2005). These differences between underwater sensor
networks and terrestrial systems make the deployment
of underwater sensor networks and research in these
networks challenging(Akyildiz et al., 2005). The fol-
lowing sections look at the challenges of underwater
sensor networks in more detail and how researchers
are addressing these challenges(Akyildiz et al., 2005).
4.1 Limited Bandwidth
Underwater wireless sensor networks require acous-
tic channels to communicate. Acoustic channels have
a limited bandwidth of below 30kHz due to absorp-
tion(Kilfoyle and Baggeroer, 2000). The underwa-
ter environmental factors make underwater commu-
nication channels highly variable(Awan et al., 2019).
These factors make the bandwidth dependent on the
frequency of transmission and the distance between
two communication nodes. The acoustic channel de-
ployed in shallow waters will be affected by a high-
temperature gradient, surface noise, and multipath ef-
fect compared to a channel deployed in deep waters
(Awan et al., 2019). For acoustic channels, the band-
width increases with an increase in depth and tem-
perature. The bandwidth also decreases with an in-
crease in distance(Bhanumathi et al., 2019; Kilfoyle
and Baggeroer, 2000). Due to bandwidth dependence
with distance, it requires that the Underwater sensor
network nodes be deployed as close to each other as
possible. This would mean that the cost of deploy-
ing these nodes would be high, and also, the net-
work power requirements would be high. To address
the challenge of limited bandwidth, researchers have
looked at the possibility of UWSNs accessing shared
channels(Akyildiz et al., 2005; Ryecroft et al., 2018).
To access shared channels, the media access con-
trol protocol (MAC) is used to coordinate the UWSN
nodes and ensure the validity of data sent through the
channel (Akyildiz et al., 2005).
4.2 Propagation Delay
High propagation delays are inherent in Underwater
Sensor Networks. The protocols designed for terres-
trial radio networks usually ignore propagation de-
lays because they are small. These protocols can-
not work well in underwater systems because of the
high delay experienced in acoustic networks (Chen
et al., 2010). Propagation delays in UWSNs are five
times higher for radio networks when compared to
terrestrial networks (Pompili et al., 2006). When the
UWSNs are used for real-time monitoring, for exam-
ple, in surveillance applications, this delay is unde-
sirable(Ryecroft et al., 2018; Kilfoyle and Baggeroer,
2000). Protocols that take into consideration this de-
lay need to be developed specifically for real-time
monitoring in underwater applications. These pro-
tocols should restore connectivity quickly when lost
and decongest congested links by dynamic rerout-
ing to minimize propagation delay. An example of
such protocol is the store and forward mechanism de-
veloped by the Delay-Tolerant Networking Research
Group. This protocol uses middleware between the
application and lower layers to resolve intermittent
connectivity and long delays (Akyildiz et al., 2005;
Kilfoyle and Baggeroer, 2000). Delays in UWSNs
for some applications, such as those used for seis-
mic monitoring, are occasioned by producing a huge
amount of data when these sensors are suddenly ac-
tivated. Such sensor networks require careful design
to minimize the propagation delay by tuning existing
networks to the characteristics of the underwater en-
vironment(Akyildiz et al., 2005; Awan et al., 2019).
4.3 Path Loss
Path loss is the decline in the power density of
an electromagnetic signal as it propagates through
a medium(Alhumyani et al., 2015; Ibrahim et al.,
2009). In UWSNs, path loss leads to attenuation
of the signal. Attenuation in UWSNs occurs when
acoustic energy is converted to heat(Kilfoyle and
Baggeroer, 2000; Awan et al., 2019). Signal attenua-
tion in underwater application increases with distance
and frequency, as shown in figure 6 (Akyildiz et al.,
2005; Fattah et al., 2020b).
Attenuation is also caused by reverberation and
scattering, and dispersion. Another critical source of
path loss is geometric spreading(Kilfoyle and Bag-
geroer, 2000). UWSNs rely on acoustic waves for
signal transmission. Acoustic waves are highly sus-
ceptible to geometric spreading. Geometric spreading
refers to the propagation of sound energy due to the
expansion of the wavefront (Min et al., 2012). Geo-
metric spreading increases with distance but is inde-
pendent of frequency(Min et al., 2012).
4.4 Unpredictable and Unreliable
Underwater Environment
The unpredictability of the underwater environment
makes it very hard to design and deploy UWSNs.
Water activities are unpredictable, the water pres-
sure is high, and the uneven seawater depth is unpre-
dictable(Felemban et al., 2015; Amoli, 2016).
And also, nodes in underwater sensor networks
are continuously moving due to water currents. Lo-
SENSORNETS 2022 - 11th International Conference on Sensor Networks
212

Figure 6: Attenuation vs. frequency and distance (Akyildiz
et al., 2005).
calization of these nodes is therefore crucial for reli-
able transmission of information(Almutairi and Mah-
foudh, 2017; Kilfoyle and Baggeroer, 2000; Min
et al., 2012). Terrestrial localization of nodes cannot
be applied to underwater networks because the under-
water conditions will disorganize the nodes and net-
work topology, making the nodes unreliable(Akyildiz
et al., 2005; Chandrasekhar et al., 2006).
5 CONCLUSION
In conclusion, we wanted, in this paper, to provide re-
searchers and readers who are interested in UWSNs
valuable overview about this promising technology.
We started our paper by showing the importance of
this technology nowadays and presenting main moti-
vations to have such technology. Then, We described
the different architectures that have been developed
by researchers so far. After that, we summarized some
of the deployment approaches that are used to deploy
nodes in the UWSNs. Moreover, we surveyed some
of the applications of UWSNs. We also discussed
core requirements of UWSNs. We discussed in this
paper some of the significant challenges and limita-
tion of UWSNs. We concluded this paper by present-
ing and comparing three different meduims that are
used in UWSNs.
REFERENCES
Akyildiz, I. F., Pompili, D., and Melodia, T. (2005). Under-
water acoustic sensor networks: research challenges.
Ad hoc networks, 3(3):257–279.
Aldosari, H., Elfouly, R., Ammar, R., and Alsulami, M.
(2020). Performance of new monitoring architectures
for underwater oil/gas pipeline using hyper-sensors.
In 2020 IEEE Symposium on Computers and Commu-
nications (ISCC), pages 1–6.
Alharbi, A., Alhumyani, H., Tolba, S., and and, R. A.
(2014). Underwater sensing and processing networks
(uspn). In 2014 IEEE Symposium on Computers and
Communications (ISCC), pages 1–7.
Alharbi, A., Ibrahim, S., Ammar, R., and Alhumyani, H.
(2015). Performance analysis of efficient pipeline ar-
chitectures for underwater big data analytics. In 2015
IEEE Symposium on Computers and Communication
(ISCC), pages 1014–1019.
Alhumyani, H., Ammar, R., Alharbi, A., and Tolba, S.
(2015). Efficient surface-level gateway deployment
using underwater sensing and processing networks. In
OCEANS 2015 - MTS/IEEE Washington, pages 1–6.
Almutairi, A. and Mahfoudh, S. (2017). Deployment pro-
tocol for underwater wireless sensors network based
on virtual force. International Journal of Advanced
Computer Science & Applications, 8(11):241–249.
Alsulami, M., Elfouly, R., and Ammar, R. (2021). A re-
liable underwater computing system. In 2021 4th
IEEE International Conference on Industrial Cyber-
Physical Systems (ICPS), pages 467–472.
Alsulami, M., Elfouly, R., Ammar, R., and Aldosari, H.
(2020a). Deployment of multiple computing systems
in underwater wireless sensor networks. In 2020 IEEE
International Symposium on Signal Processing and
Information Technology (ISSPIT), pages 1–6.
Alsulami, M., Elfouly, R., Ammar, R., Aldosari, H., and Al-
enizi, A. (2019). Ideal number of computers for real-
time underwater computing systems. In 2019 IEEE
International Symposium on Signal Processing and
Information Technology (ISSPIT), pages 1–5.
Alsulami, M., Elfouly, R., Ammar, R., and Alenizi, A.
(2020b). A modified k-medoids algorithm for de-
ploying a required number of computing systems in
a three dimensional space in underwater wireless sen-
sor networks. In 2020 IEEE International Symposium
on Signal Processing and Information Technology (IS-
SPIT), pages 1–5.
Amoli, P. V. (2016). An overview on current researches on
underwater sensor networks: Applications, challenges
and future trends. International Journal of Electrical
and Computer Engineering, 6(3):955.
Arima, M., Yoshida, K., and Tonai, H. (2014). Development
of a four-channel underwater passive acoustic moni-
toring system for the use of underwater vehicles. In
2014 Oceans - St. John’s, pages 1–6.
Awan, K. M., Shah, P. A., Iqbal, K., Gillani, S., Ahmad,
W., and Nam, Y. (2019). Underwater wireless sen-
sor networks: A review of recent issues and chal-
lenges. Wireless Communications and Mobile Com-
puting, 2019.
Bhanumathi, S., Rajkishore, S., and Kowshik, S. (2019).
Localized aided energy efficient optimal relay selec-
tion protocol for underwater wireless sensor networks.
In 2019 3rd International Conference on Trends in
Electronics and Informatics (ICOEI), pages 880–885.
Bhaskarwar, R. V. and Pete, D. J. (2021). Cross-layer design
approaches in underwater wireless sensor networks: A
survey. SN Computer Science, 2(5):1–26.
Blidberg, D. R. (2001). The development of autonomous
underwater vehicles (auv); a brief summary. In Ieee
Icra, volume 4, page 1. Citeseer.
Underwater Wireless Sensor Networks: A Review
213

Bradbeer, R. S., Hodgson, P., Lam, K., and Ku, K.
K. K. (2007). Establishment of a three dimen-
sional, real-time marine environment monitoring sys-
tem, databuoy™ i, in the hoi ha wan marine park,
hong kong, with connection to the internet. In 2007
14th International Conference on Mechatronics and
Machine Vision in Practice, pages 174–178.
Chandrasekhar, V., Seah, W. K., Choo, Y. S., and Ee,
H. V. (2006). Localization in underwater sensor net-
works: survey and challenges. In Proceedings of the
1st ACM international workshop on Underwater net-
works, pages 33–40.
Chang, J.-E., Huang, S.-W., and Guo, J.-H. (2016). Hunt-
ing ghost fishing gear for fishery sustainability using
autonomous underwater vehicles. In 2016 IEEE/OES
Autonomous Underwater Vehicles (AUV), pages 49–
53.
Chen, Y.-S., Juang, T.-Y., Lin, Y.-W., and Tsai, I.-C. (2010).
A low propagation delay multi-path routing protocol
for underwater sensor networks. Internet Technology
Journal, 11(2):153–165.
Collins, A. (2013). Application of subsea wireless technol-
ogy to environmental monitoring. In 2013 OCEANS -
San Diego, pages 1–5.
Dong, Y., Zhang, G., He, X., and Tang, J. (2015). Informa-
tion fusion in networked underwater target detection.
In OCEANS 2015 - Genova, pages 1–4.
Fattah, S., Gani, A., Ahmedy, I., Idris, M. Y. I., and Tar-
gio Hashem, I. A. (2020a). A survey on underwater
wireless sensor networks: Requirements, taxonomy,
recent advances, and open research challenges. Sen-
sors, 20(18):5393.
Fattah, S., Gani, A., Ahmedy, I., Idris, M. Y. I., and Tar-
gio Hashem, I. A. (2020b). A survey on underwater
wireless sensor networks: Requirements, taxonomy,
recent advances, and open research challenges. Sen-
sors, 20(18):5393.
Felemban, E., Shaikh, F. K., Qureshi, U. M., Sheikh,
A. A., and Qaisar, S. B. (2015). Underwater sensor
network applications: A comprehensive survey. In-
ternational Journal of Distributed Sensor Networks,
11(11):896832.
Gallagher, D. G., Manley, R. J., Hughes, W. W., and Pilcher,
A. M. (2016). Development of an enhanced underwa-
ter navigation capability for military combat divers. In
OCEANS 2016 MTS/IEEE Monterey, pages 1–4.
He, M., Chen, Q., Dai, F., and Zheng, X. (2018). Topo-
logical configuration and optimization in underwa-
ter acoustic sensor networks: A survey. Inter-
national Journal of Distributed Sensor Networks,
14(8):1550147718795359.
Heidemann, J., Stojanovic, M., and Zorzi, M. (2012). Un-
derwater sensor networks: applications, advances and
challenges. Philosophical Transactions of the Royal
Society A: Mathematical, Physical and Engineering
Sciences, 370(1958):158–175.
Ibrahim, S., Ammar, R., and Cui, J. (2009). Geometry-
assisted gateway deployment for underwater sensor
networks. In 2009 IEEE Symposium on Computers
and Communications, pages 932–937.
Iqbal, Z. and Lee, H.-N. (2015). Deployment strategy anal-
ysis for underwater cooperative wireless sensor net-
works. In 2015 International Conference on Infor-
mation and Communication Technology Convergence
(ICTC), pages 699–703.
Jacobi, M. and Karimanzira, D. (2013). Underwater
pipeline and cable inspection using autonomous un-
derwater vehicles. In 2013 MTS/IEEE OCEANS -
Bergen, pages 1–6.
Jassim, W. M. and Abdelkareem, A. E. (2020). Performance
enhancement of oil pipeline monitoring for underwa-
ter wireless sensor network. In 2020 International
Conference on Computer Science and Software Engi-
neering (CSASE), pages 38–43.
Khan, M. F., Bibi, M., Aadil, F., and Lee, J.-W. (2021).
Adaptive node clustering for underwater sensor net-
works. Sensors, 21(13):4514.
Kilfoyle, D. B. and Baggeroer, A. B. (2000). The state of
the art in underwater acoustic telemetry. IEEE Journal
of oceanic engineering, 25(1):4–27.
Kiranmayi, M. and Kathirvel, A. (2015). Underwater wire-
less sensor networks: applications, challenges and de-
sign issues of the network layer-a review”. Interna-
tional Journal of Emerging Trends in Engineering Re-
search, 3(1):05–11.
Lee, P., Jeon, B., Kim, S., Choi, H., Lee, C., Aoki, T.,
and Hyakudome, T. (2004). An integrated naviga-
tion system for autonomous underwater vehicles with
two range sonars, inertial sensors and doppler veloc-
ity log. In Oceans ’04 MTS/IEEE Techno-Ocean ’04
(IEEE Cat. No.04CH37600), volume 3, pages 1586–
1593 Vol.3.
Lloret, J. (2013). Underwater sensor nodes and networks.
Maeda, F., Takagawa, S., Asada, A., Maki, T., Sasaki,
Y., and Yamamoto, F. (2011). Next r amp;d
of measurement method of offshore minerals using
the low-frequency acoustic mills-cross transmission
and receiving system multibeam sub-bottom profil-
ing method and ”natsushima” cruise experiment. In
2011 IEEE Symposium on Underwater Technology
and Workshop on Scientific Use of Submarine Cables
and Related Technologies, pages 1–5.
Min, H., Cho, Y., and Heo, J. (2012). Enhancing the reli-
ability of head nodes in underwater sensor networks.
Sensors, 12(2):1194–1210.
Pompili, D., Melodia, T., and Akyildiz, I. F. (2006). Routing
algorithms for delay-insensitive and delay-sensitive
applications in underwater sensor networks. In Pro-
ceedings of the 12th annual international conference
on Mobile computing and networking, pages 298–309.
Ryecroft, S. P., Shaw, A., Fergus, P., Kot, P., Muradov,
M., Moody, A., and Conroy, L. (2018). Requirements
of an underwater sensor-networking platform for en-
vironmental monitoring. In 2018 11th International
Conference on Developments in ESystems Engineer-
ing (DeSE), pages 95–99. IEEE.
Zhang, W., Wang, J., Han, G., Zhang, X., and Feng, Y.
(2019). A cluster sleep-wake scheduling algorithm
based on 3d topology control in underwater sensor
networks. Sensors, 19(1):156.
Zwanzig, C. (2018). Ship-based exploration of sub-
marine gas hydrates and environmental monitoring
with multibeam echo sounders. In 2018 OCEANS -
MTS/IEEE Kobe Techno-Oceans (OTO), pages 1–8.
SENSORNETS 2022 - 11th International Conference on Sensor Networks
214
