
A Vision-based Lane Detection Technique using Deep Neural Networks
and Temporal Information
Chun-Ke Chang
1
and Huei-Yung Lin
2 a
1
Department of Electrical Engineering, National Chung Cheng University, Chiayi 621, Taiwan
2
Department of Electrical Engineering and Advanced Institute of Manufacturing with High-tech Innovations,
National Chung Cheng University, Chiayi 621, Taiwan
Keywords:
Advanced Driver Assistance System, Lane Detection, Convolutional Neural Network.
Abstract:
With the advances of driver assistance technologies, more and more people begin to pay attentions on traffic
safety. Among various vehicle subsystems, the lane detection module is one of the important parts of advanced
driver assistance system (ADAS). Traditional lane detection techniques use machine vision algorithms to find
straight lines in road scene images. However, it is difficult to identify straight or curve lane markings in
complex environments. This paper presents a lane detection technique based on the deep neural network. It
utilizes the 3D convolutional network with the incorporation of temporal information to the network structure.
Two well-known lane detection network structures, PINet and PolyLaneNet, are improved by integrating 3D
ResNet50. In the experiments, the accuracy is greatly improved for the applications to a variety of different
complex scenes.
1 INTRODUCTION
With the recent of advances of deep learning technol-
ogy, many related techniques have been developed for
various real world applications. Among them, the au-
tonomous driving or advanced driver assistance sys-
tem (ADAS) have attracted much more attentions for
the researchers and practitioners in automotive indus-
tries. The lane departure warning system is one of the
most important modules for current driver assistance
functions. It is used to automatically notify the driver
when the vehicle deviates from the center of the origi-
nal lane (Lin et al., 2020). Thus, some possible traffic
accidents can be avoided effectively.
As illustrated in Figure 1, the lane departure warn-
ing system requires to detect the front lane markings
on the road, presumably using an on-board camera in-
stalled inside the vehicle. It can be used to determine
the distance between the lane markings and the vehi-
cle. When the driver inadvertently deviates from the
lane, the system will send out a timely warning signal.
The lane deviation information can also be adopted by
autonomous vehicles as the feedback signals for driv-
ing control. Consequently, it can be considered as the
first stage towards the safety issues related to the lane
keeping for unmanned driving.
a
https://orcid.org/0000-0002-6476-6625
Figure 1: An illustration of the lane departure warning for
driver assistance.
The detection of lane markings is essential for lane
keeping or departure warning. In the past decades, the
traditional lane detection methods were implemented
based on the Hough transform, with a post-processing
step for lane marking identification. In the early work,
Aly performed an inverse perspective mapping (IPM)
on the input image to detect straight lines, and utilized
the RANSAC algorithm to evaluate the lane markings
(Aly, 2008). Although this approach is fairly efficient,
it highly depends on the real scene environment. The
lane detection results will be seriously affected when
there are occlusions by the vehicles.
The recent advances on deep learning approaches
have improved the accuracy of lane detection results,
172
Chang, C. and Lin, H.
A Vision-based Lane Detection Technique using Deep Neural Networks and Temporal Information.
DOI: 10.5220/0010973200003191
In Proceedings of the 8th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2022), pages 172-179
ISBN: 978-989-758-573-9; ISSN: 2184-495X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

compared to the traditional methods. There exist sev-
eral important network structures, including LaneNet
(Neven et al., 2018), SCNN (Pan et al., 2018), Point-
LaneNet (Chen et al., 2019) and Line-CNN (Li et al.,
2019), for the deep learning based lane detection tech-
niques. Most of the existing methods use a single im-
age for lane marking detection. This is, however, not
stable enough due to the continuity nature of the se-
quential image input. To take this temporal informa-
tion into consideration, SegnetConvLSTM (Zou et al.,
2019) utilized the semantic segmentation from Segnet
(Badrinarayanan et al., 2017) and added ConvLSTM
(Shi et al., 2015) to detect lanes. Although the detec-
tion of road markings are relatively stable compared
to the single image processing, there are some limita-
tions on semantic segmentation. It requires the lane
markings or pre-processing of image pixels for train-
ing. This generally takes more computational time for
real-time processing and is relatively expensive.
2 RELATED WORK
Most recent works on lane detection are based on the
semantic segmentation of input images. The method
aims to divide the input images into different regions
with their own categories. It is also capable of the ex-
pression of complex-shaped curves according to vari-
ous generative models. In the existing literature, (Pan
et al., 2018; Hou et al., 2019; Lo et al., 2019; Ghafoo-
rian et al., 2018) have demonstrated the application of
semantic segmentation in the lane detection tasks. In
addition, there are also some algorithms using multi-
ple categories to distinguish real instances. Although
instance segmentation is able to deal with the multi-
classification problem, multiple categories can only
be classified for fixed instances in the approaches.
Neven et al. proposed a LaneNet network model
which attempts to use instance segmentation to solve
the problem of different lane categories (Neven et al.,
2018). It contains a shared encoder with two types of
decoders. There are two branches in the architecture,
one performing the semantic division of the input im-
ages and the other predicting the embedding features
for instance segmentation. The lane segmentation re-
sult is then formed by combining the last two branch
outputs.
Pan et al. proposed a spatial CNN (convolutional
neural network), SCNN, for traffic scene understand-
ing (Pan et al., 2018). It utilized a CNN-like scheme
to provide an effective information propagation in the
spatial level. One important characteristic of SCNN
is its capability to preserve the continuity of long thin
structures. The network is also able to work with the
Temporal
Figure 2: The 3D ConvNets (or 3D CNN) used to extract
the time and space information from an image sequence.
LargeFOV model (Chen et al., 2018) to achieve a sig-
nificant improvement. In Line-CNN (Li et al., 2019),
the main component is the RPN (region proposal net-
work) from Faster R-CNN. By adapting to a line pro-
posal unit (LPU), the network can predict the starting
points of the lane markings. The LPU will then draw
the lines based on the fixed x-axis with the horizontal
offset of the y-axis at the end point.
To consider the temporal information, the recur-
rent neural network (RNN) is a classic network archi-
tecture which can transfer the output calculated in the
previous layer to itself as an input and add to the next
sum. Thus, the network model is very suitable for the
data with sequential correlation. One major drawback
is that the information fed in at the beginning of the
input sequence will be gradually forgotten after a long
training time. Shi et al. proposed an LSTM network
architecture with convolution operation, ConvLSTM,
which was able to process image sequences with tem-
poral information and widely used in video analysis.
For semantic segmentation of images, the time series
input can also be processed effectively.
Zou et al. proposed a hybrid neural network com-
bining CNN and RNN for lane detection (Zou et al.,
2019). It took multiple continuous frames as an input,
and semantic segmentation of the lane was carried out
by ConvLSTM. In the proposed framework, a CNN
encoder was first used to extract the features of each
input frame, followed by processing the sequentially
encoded features of all input frames by a ConvLSTM.
The encoder-decoder structure was adopted for infor-
mation reconstruction and lane prediction by incorpo-
rating time and space dimensions. In addition to lane
detection by semantic segmentation, ConvLSTM can
also be adopted for various scene understanding tasks
such as anomaly detection and passenger demand pre-
diction, etc.
Another approach to incorporate time information
to CNN is the 3D convolutional neural network with
an additional time dimension. 3D ConvNets proposed
by Tran et al. provides better spatiotemporal feature
learning compared to the conventional 2D CNNs. As
illustrated in Figure 2, 3D ConvNets (or 3D CNN) is
able to extract the time and space information in the
A Vision-based Lane Detection Technique using Deep Neural Networks and Temporal Information
173

video more effectively by adding the frame by frame
time domain information. In (Yuan et al., 2018), a
lane keeping technique was proposed using a multi-
state model. A 3DCNN-LSTM end-to-end model was
trained for going straight and turning left/right deci-
sion. Nevertheless, they did not explicitly identify the
lane markings for vehicle localization.
3 OUR APPROACH
The proposed technique for lane marking detection is
based on PINet and PolyLaneNet, with the temporal
information embedded for improvement.
PolyLaneNet and PINet
PolyLaneNet (Tabelini et al., 2021) is an end-to-end
lane detection network. It is based on the deep poly-
nomial regression output to represent the lane mark-
ings in the image using polynomial curves. In addi-
tion to generating the curve fitting for each lane, it
also provides the confidence level. In PolyLaneNet, a
preset maximum number of lanes needs to be defined,
and the lane markings are determined by the start and
end points of a lane, with a confidence value provided.
The end-to-end lane detection network is not only fast
in terms of the computational speed, but also not re-
quired to perform additional post-processing.
To detect the important features in the image, the
key point estimation approach is commonly adopted.
It is widely used in deep neural networks, such as for
human pose estimation. In this paper, the key point
estimation is used for hourglass network for lane de-
tection. An hourglass block is a network architecture
that can transmit various scales of information to each
layer. It can then obtain the global and local charac-
teristics of the entire network. For feature extraction,
corner detection or the center of a regional object are
used. Since the hourglass network can be stacked to
make the network deeper, this characteristic is used to
incorporate the key point estimation to generate a new
frame for lane detection.
PINet (Ko et al., 2020) is a structure that utilizes
two hourglass networks to synthesize, and combine
key point estimation and point cloud segmentation to
detect lane markings. The network adopts three out-
put branches, namely confidence branch, lane offset
branch and embedding branch. The confidence and
lane offset branches are mainly used to predict the lo-
cation of each lane, and the embedding branch is used
to generate the characteristics of each predicted point.
Different lane markings are distinguished according
to their characteristics. PINet aims to work in general
Image Sequence
L
1
L
2
L
5
3D-ResNet50
PolyLaneNet
Output Image
Figure 3: PolyLaneNet is improved with 3D ResNet by in-
corporating the temporal information.
Image Sequence
3D-ResNet50
UP Sample
PINet
Confidence branch
Offset branch
Feature branch
Output branch
Output Image
Figure 4: 3D ResNet is integrated with PINet for feature
extraction.
scenes with any number of lanes. The model is light-
weight and the output lane markings are presented in
dots.
Improvement on PolyLaneNet and PINet
In the original PolyLaneNet, ResNet (He et al., 2016)
was used for feature extraction. Based on the latest
works, it is necessary to use video sequence as in-
put instead of the image frames for lane detection. In
this paper, we utilize the features in PolyLaneNet. As
illustrated in Figure 3, 3D ResNet50 is adopted for
feature extraction, with 5 consecutive image frames
taken as the input for processing.
In the original PINet, two hourglass networks are
adopted for feature extraction. To improve the recog-
nition rate and stability of lane detection, the network
backbone is changed to 3D ResNet50, as depicted
in Figure 4. The image information along the time
axis is included for robust lane detection. In our 3D
ResNet implementation, 5 consecutive image frames
are taken as input for feature extraction.
Post-processing
Different from the general representation of lanes us-
ing curves adopted by most algorithms, the outputs of
PINet are represented using points. Since there might
be noisy for the lane marking detection result, in this
work we further adopt RANSAC for curve fitting and
outlier removal. As the flowchart illustrated in Figure
5, it consists of four major steps:
1. The output points of the network are fitted with
the second order RANSAC.
VEHITS 2022 - 8th International Conference on Vehicle Technology and Intelligent Transport Systems
174

Use the Second order Ransac fitting
Yes
If function is increase function
Cut into upper and lower
segments, and select the line
segment closest to the point
Draw the line
Input : Image Sequence Network : PINet
No
Output Image
Figure 5: The system flowchart of our proposed lane mark-
ing detection algorithm.
Figure 6: The original architecture of 3D CNN is split into
spatial and time convolutions.
2. Check if the fitting results with quadratic equation
are appropriate.
3. Separate the curve into upper and lower segments
if the fitting is not smooth enough.
4. Take the line segments to approximate the points.
Improvement on 3D ResNet
In the past few years, the one-dimensional convolu-
tion has been applied to many convolutional architec-
tures. It can be used to transform different channels,
as well as increase or reduce channel dimensions. Re-
cently, Tran et al. proposed a time-space split con-
volution architecture (Tran et al., 2018). They de-
signed a R(2+1)D architecture, which changed the
original 3D CNN to a 2D space convolution and a
1D time convolution. That is, to separate the time di-
mension from the space dimension in the 3D CNN.
As illustrated in Figure 6, the original architecture
of 3D CNN convolves time and space together with
t × d × d. It can be split into the spatial convolution
1 × d × d and the time convolution product t × 1 × 1.
Since the split R(2+1)D has a remarkable improve-
ment compared to the original 3D CNN, it is adopted
in this work for 3D ResNet50 architecture.
The Leaky ReLU is an improved function based
on ReLU proposed by Xu et al. (Xu et al., 2015). In
the original ReLU, a linear rectification function with
the value set to 0 for x < 0 but remained unchanged
for x > 0. The problem of using ReLU is that it tends
to cause over-fitting. On the contrary, Leaky ReLU is
defined with a non-zero slope when x < 0. Thus, it is
adopted in this work for our ResNet implementation
to avoid over-fitting.
4 EXPERIMENTS
One important objective of this work is considering
the computational speed during the lane detection. It
is also focused on the improvement of PolyLaneNet
and PINet after incorporating 3D ResNet, including
the accuracy and stability of lane marking detection
in the urban areas. The algorithms are executed on a
PC running Linux-Ubuntu-16.04, Python3.6, Pytorch
1.6.0, and Nvidia GTX 1080 8G. The training param-
eters are as follows: learning rate = 0.0003, batch size
= 10.
Datasets
TuSimple is currently one of the most commonly used
datasets for lane detection (Kai, 2017). The dataset is
by far the easiest one for training since the images
are mainly captured from highway driving. It consists
of 3,626 video clips, with 20 image frames for each.
In this work, we also collect image datasets from
Taiwan road scenes by ourselves. The images are
mainly acquired during daytime with normal weather
conditions. In the urban areas, the road scenes are
more complicated compared to the highway traffic.
Our image recording contains totally 43 videos of 1-
minute footage. The images are then taken for every
5 frames and result in 351 for each video. Moreover,
we have also removed the traffic scenes with unclear
lane markings such as the images captured near the
crossroads and stopped for too long. Finally, there are
8,465 images in our dataset, and a sample image is
shown in Figure 7.
After annotating all the lanes in our own dataset, it
is found that some lanes have too few marking points.
This might cause unsatisfactory results for lane de-
tection due to the inadequate lane marking fitting for
training. In terms of perspective distortion, the loca-
tions closer to the vanishing point require more lane
markings and vice versa. Thus, the following proce-
dures are carried out to provide more lane marking
points for training data, and the comparison is shown
in Figure 8.
• The originally marked lane points are connected
A Vision-based Lane Detection Technique using Deep Neural Networks and Temporal Information
175

Figure 7: An image from our own road scene image dataset.
(a) The result using original training data.
(b) The results with additional lane marking points.
Figure 8: The comparison of lane marking detection results
with different training data annotation.
to create a grayscale graphical image, and the con-
nected lines are stored in the grayscale map.
• Set a threshold in the image vertical direction to
store all markings above and random access a
fixed number of markings below.
• Keep the lane marking points being accessed, so
the number of marking points can be increased by
3 to 5 times.
Results
There contain 3,626 images in the TuSimple dataset,
so it is split into 3,268 samples for training and 358
samples for testing. The accuracy of our lane marking
Figure 9: The result from PolyLaneNet 3D-ResNet 2P1D
with the image size of 224 × 224.
detection is evaluated based on the x-axis value of the
vertical 48 points in the testing data.
For the improvement over PolyLaneNet, the time-
space split convolution (2P1D) is added to the origi-
nal 3D ResNet50. The original activation function is
changed from ReLU to LeakyReLU, while the image
input size is maintained at 224 × 224. The input im-
ages are taken at 10 frames at a time. Table 1 tabulates
the comparison of parameters and results of the origi-
nal and modified PolyLaneNet. The results show that
when the size of images and the image sequence re-
main unchanged, the time dimension information can
be captured more effectively during training due to the
the time and space split convolution. Consequently,
the overall accuracy can be improved significantly.
In Table 2, we tabulates the testing results of the
PolyLaneNet-3D-ResNet under different image sizes
and different numbers of input frame numbers. It also
includes our improvement over 3D ResNet. When the
images become smaller, we can find that the accu-
racy is decreased as the number of image frames is
increased. Also, the improvement on the number of
input frames for 10 images is much greater than us-
ing 5 images. By adding the convolution of space and
time to the original 3D ResNet and changing ReLU
to LeakyReLU, a significant improvement in terms of
accuracy can be obtained.
Next, we evaluate the integration of PINet with the
general 3D ResNet50 network architecture, as well as
the general ResNet50 network architecture for com-
parison. The difference between the time and space
split convolution with the LeakyReLU added to the
3D ResNet50 network architecture to show the effect
VEHITS 2022 - 8th International Conference on Vehicle Technology and Intelligent Transport Systems
176

Table 1: The comparison of parameters and results of the original and modified PolyLaneNet.
PolyLaneNet PolyLaneNet-2P1D
Dataset TuSimple TuSimple
Train 3,268 3,268
Model 3D-ResNet50 3D-ResNet50-2P1D
Validation 358 358
Image size 224 × 224 224 × 224
Image sequence 10 10
Batch-Size 8 8
Epoch 2,656 2,588
Accuracy(%) 65% 70%
Table 2: The testing results of the PolyLaneNet-3D-ResNet under different image sizes and different numbers of input frame
numbers.
Model Image size Image sequence Accuracy
PolyLaneNet-3D-ResNet 360 × 640 5 67%
PolyLaneNet-3D-ResNet 224 × 224 10 65%
PolyLaneNet-3D-ResNet-
2p1d-LeakyReLU 224 × 224 10 70%
Figure 10: The result from PolyLaneNet 3D-ResNet 2P1D
with the image size of 224 × 224.
of ResNet50 on our own dataset. The original PINet
utilizes 2 hourglass networks for feature extraction.
To compare with 3D ResNet50, the feature extraction
part in PINet is changed to ResNet50 network archi-
tecture. As shown in Table 3, although the accuracy is
slightly dropped, it is more reasonable to incorporate
an image sequence as the network input for practical
applications.
Figure 11(a) shows a result of PINet-ResNet50.
The blue dots in the figure represent the actual lane
markings of the TuSimple dataset, and the green lines
represent the straight line generated by our detec-
tion network and RANSAC. The result demonstrates
the effectiveness of straight lane detection using the
(a) The result of lane marking detection.
(b) The lane marking not detected in the middle is due to the
vehicle’s lane change.
Figure 11: The results from PINet ResNet50.
proposed model. The advantage of using image se-
quences as the inputs to the network is to avoid mis-
detection due to the lane markings blocked by vehi-
cles. Figure 11(b) shows the output when ResNet 50
is adopted as the network model. The lane marking
not detected in the middle is due to the vehicle’s lane
change.
Finally, the comparison between ResNet50 and
3D ResNet50 is provided, as well as the results of the
original 3D ResNet50 and the time-space split convo-
A Vision-based Lane Detection Technique using Deep Neural Networks and Temporal Information
177
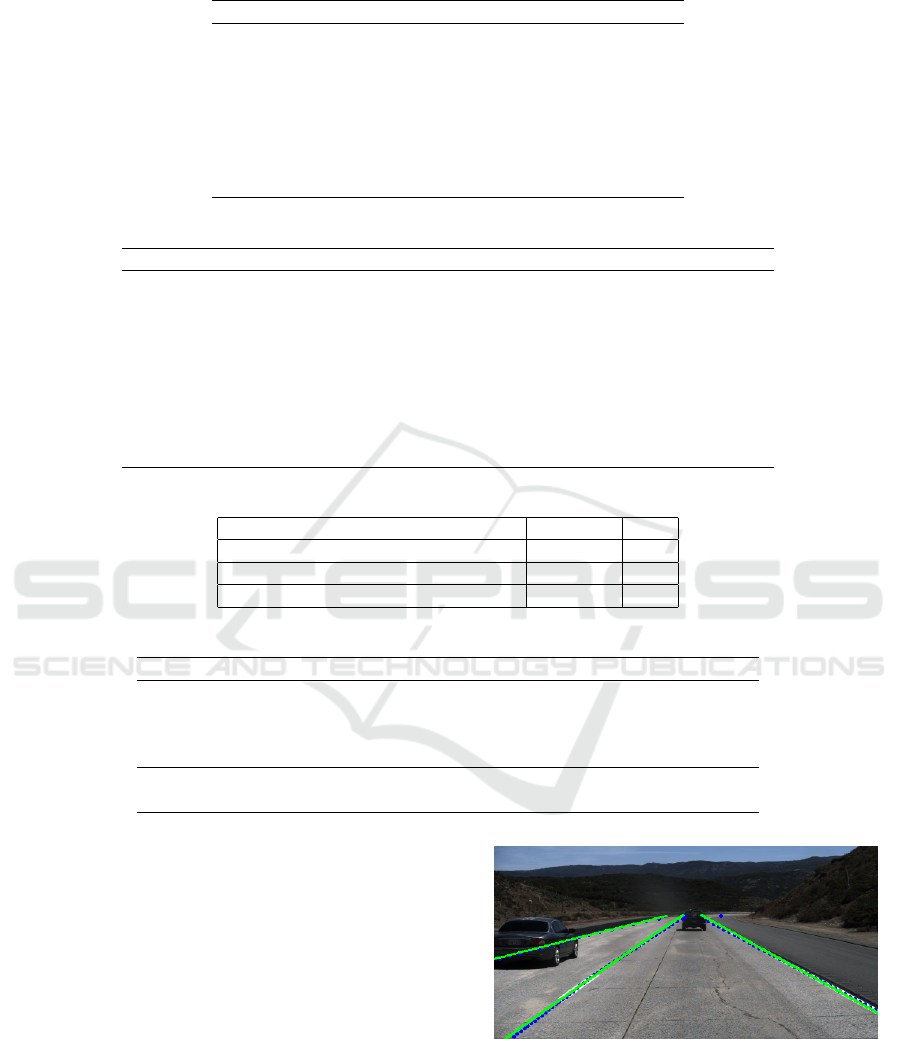
Table 3: The comparison of PINet-ResNet50 and PINet-3D-ResNet50.
PINet-ResNet50 PINet-3D-ResNet50
Dataset TuSimple TuSimple
Train 3,268 3,268
Validation 358 358
Image size 512 × 256 512 × 256
Image sequence 1 5
Batch-Size 10 5
Epoch 273 272
Accuracy(%) 91% 89%
Table 4: The comparison of PINet-3D-ResNet50 and PINet-3D-ResNet50-2P1D-LeakyReLU.
PINet-3D-ResNet50 PINet-3D-ResNet50-2P1D-LeakyReLU
Dataset TuSimple TuSimple
Train 3,268 3,268
Validation 358 358
Model 3D-ResNet50 3D-ResNet50-2P1D-LeakyReLU
Image size 512 × 256 512 × 256
Image sequence 1 5
Batch-Size 10 5
Epoch 273 272
Accuracy(%) 89% 91%
Table 5: The testing results of PINet.
Model Accuracy FPS
PINet-ResNet 91.3% 60
PINet-3D-ResNet 89.1% 16
PINet-3D-ResNet-2P1D-LeakyReLU 91.3% 12
Table 6: The comparison with different algorithms on TuSimple dataset.
Method Acc FP FN
Line-CNN (Li et al., 2019) 96.87% 0.0442 0.0197
SCNN (Pan et al., 2018) 96.53% 0.0617 0.0180
PolyLaneNet (Tabelini et al., 2021) 93.36% 0.0942 0.0933
PINet (Ko et al., 2020) 93.36% 0.0467 0.0254
Ours (PolyLaneNet-3D-ResNet50-LeakyReLU) 70.06% 0.6081 0.5852
Ours (PINet-3D-ResNet50-LeakyReLU) 91.34% 0.1138 0.1101
lution with ReLU changed to LeakyReLU. As shown
in Table 4, adding time and space split convolution
and LeakyReLU have significantly improved the ac-
curacy. The detection result of PINet-3D-ResNet50-
2P1D network architecture is shown in Figure 12. The
testing results for PINet is shown in Table 5, with dif-
ferent feature extraction networks. It is found that the
execution speed of the PINet network under ResNet50
can achieve 60 fps, which is superior to the original
network. Although the accuracy of 3D ResNet50 has
slightly dropped, the main improvement of the net-
work lies in its stability. Nevertheless, the accuracy is
improved after adding time and space split convolu-
tion and LeakyReLU.
At present, most of the lane detection network ar-
chitectures in the literature use a single image as in-
Figure 12: The lane detection result from PINet 3D-
ResNet50-2P1D.
put. Although the evaluation in Table 6 does not show
clear accuracy improvement over other network mod-
els. However, this work presents an innovative net-
work architecture which incorporates the temporal in-
formation for lane detection.
VEHITS 2022 - 8th International Conference on Vehicle Technology and Intelligent Transport Systems
178

5 CONCLUSION
This paper presents a lane detection technique based
on deep learning models with the use of temporal in-
formation. We improve the convolutional methods for
the neural network architecture 3D ResNet50. The
main contribution of this work consists of two parts,
the first is incorporating the time axis with PINet and
PolyLaneNet, and the other is the improvement on the
3D ResNet50 network model. In the experiments, the
accuracy is greatly improved for the applications to a
variety of different complex scenes.
ACKNOWLEDGMENTS
This work was financially/partially supported by the
Advanced Institute of Manufacturing with High-tech
Innovations (AIM-HI) from The Featured Areas Re-
search Center Program within the framework of the
Higher Education Sprout Project by the Ministry of
Education (MOE) in Taiwan, the Ministry of Science
and Technology of Taiwan under Grant MOST 106-
2221-E-194-004 and Create Electronic Optical Co.,
LTD, Taiwan.
REFERENCES
Aly, M. (2008). Real time detection of lane markers in ur-
ban streets. In 2008 IEEE Intelligent Vehicles Sympo-
sium, pages 7–12. IEEE.
Badrinarayanan, V., Kendall, A., and Cipolla, R. (2017).
Segnet: A deep convolutional encoder-decoder ar-
chitecture for image segmentation. IEEE transac-
tions on pattern analysis and machine intelligence,
39(12):2481–2495.
Chen, L.-C., Papandreou, G., Kokkinos, I., Murphy, K., and
Yuille, A. L. (2018). Deeplab: Semantic image seg-
mentation with deep convolutional nets, atrous con-
volution, and fully connected crfs. IEEE Transac-
tions on Pattern Analysis and Machine Intelligence,
40(4):834–848.
Chen, Z., Liu, Q., and Lian, C. (2019). Pointlanenet: Ef-
ficient end-to-end cnns for accurate real-time lane de-
tection. In 2019 IEEE Intelligent Vehicles Symposium
(IV), pages 2563–2568. IEEE.
Ghafoorian, M., Nugteren, C., Baka, N., Booij, O., and Hof-
mann, M. (2018). El-gan: Embedding loss driven gen-
erative adversarial networks for lane detection. In Pro-
ceedings of the European Conference on Computer Vi-
sion (ECCV) Workshops, pages 0–0.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 770–778.
Hou, Y., Ma, Z., Liu, C., and Loy, C. C. (2019). Learning
lightweight lane detection cnns by self attention distil-
lation. In Proceedings of the IEEE/CVF International
Conference on Computer Vision, pages 1013–1021.
Kai, Z. (2017). Tusimple datasets.
https://github.com/TuSimple/tusimple-benchmark.
Ko, Y., Jun, J., Ko, D., and Jeon, M. (2020). Key points
estimation and point instance segmentation approach
for lane detection. arXiv preprint arXiv:2002.06604.
Li, X., Li, J., Hu, X., and Yang, J. (2019). Line-cnn: End-
to-end traffic line detection with line proposal unit.
IEEE Transactions on Intelligent Transportation Sys-
tems, 21(1):248–258.
Lin, H. Y., Dai, J. M., Wu, L. T., and Chen, L. Q. (2020).
A vision based driver assistance system with for-
ward collision and overtaking detection. Sensors,
20(18):100–109.
Lo, S.-Y., Hang, H.-M., Chan, S.-W., and Lin, J.-J. (2019).
Multi-class lane semantic segmentation using efficient
convolutional networks. In 2019 IEEE 21st Inter-
national Workshop on Multimedia Signal Processing
(MMSP), pages 1–6. IEEE.
Neven, D., De Brabandere, B., Georgoulis, S., Proesmans,
M., and Van Gool, L. (2018). Towards end-to-end
lane detection: an instance segmentation approach. In
2018 IEEE intelligent vehicles symposium (IV), pages
286–291. IEEE.
Pan, X., Shi, J., Luo, P., Wang, X., and Tang, X. (2018).
Spatial as deep: Spatial cnn for traffic scene under-
standing. In Proceedings of the AAAI Conference on
Artificial Intelligence, volume 32.
Shi, X., Chen, Z., Wang, H., Yeung, D.-Y., Wong, W.-K.,
and Woo, W.-c. (2015). Convolutional lstm network:
A machine learning approach for precipitation now-
casting. arXiv preprint arXiv:1506.04214.
Tabelini, L., Berriel, R., Paixao, T. M., Badue, C.,
De Souza, A. F., and Oliveira-Santos, T. (2021). Poly-
lanenet: Lane estimation via deep polynomial regres-
sion. In 2020 25th International Conference on Pat-
tern Recognition (ICPR), pages 6150–6156. IEEE.
Tran, D., Wang, H., Torresani, L., Ray, J., LeCun, Y., and
Paluri, M. (2018). A closer look at spatiotemporal
convolutions for action recognition. In Proceedings of
the IEEE conference on Computer Vision and Pattern
Recognition, pages 6450–6459.
Xu, B., Wang, N., Chen, T., and Li, M. (2015). Empiri-
cal evaluation of rectified activations in convolutional
network. arXiv preprint arXiv:1505.00853.
Yuan, W., Yang, M., Li, H., Wang, C., and Wang, B. (2018).
End-to-end learning for high-precision lane keeping
via multi-state model. CAAI Transactions on Intelli-
gence Technology, 3(4):185–190.
Zou, Q., Jiang, H., Dai, Q., Yue, Y., Chen, L., and Wang, Q.
(2019). Robust lane detection from continuous driving
scenes using deep neural networks. IEEE transactions
on vehicular technology, 69(1):41–54.
A Vision-based Lane Detection Technique using Deep Neural Networks and Temporal Information
179
