
Comparison of Online Exploration and Coverage Algorithms in
Continuous Space
Malte Z. Andreasen
a
, Philip I. Holler
b
, Magnus K. Jensen
c
and Michele Albano
d
Department of Computer Science, Aalborg University, Selma Lagerløfs Vej 300, 9220 Aalborg, Denmark
Keywords:
Distributed Exploration, Online Terrain Coverage, Swarm Robotics, Multi Agent Exploration Simulator.
Abstract:
We propose a framework to compare algorithms for multi agent exploration in an unknown continuous 2d
environment. To analyze trade offs we compare algorithms with varying robot hardware requirements. We
showcase our approach on Random Ballistic Walk (RBW), frontier-based exploration (The Next Frontier,
TNF), Spiraling and Selective Backtracking (SSB), and Local Voronoi Decomposition (LVD). Algorithms
that operate in a discrete grid-based space, such as LVD and SSB, are mapped to a continuous space for
comparison with other algorithms. To our knowledge, no other extensive comparison of these exploration
algorithms operating under the same testing environment has been conducted. The algorithms are tested
in a custom 2D physics-driven simulation (Multi Agent Exploration Simulator, MAES), with two types of
maps, namely the Cave map (C-Map) and the Building map (B-Map). The performance of each algorithm is
evaluated in terms of coverage and exploration of the map. Results show that SSB performed the best in terms
of coverage in all tested scenarios. TNF performed the best in terms of exploration, especially on bigger maps.
RBW achieved good results in terms of both coverage and exploration in C-Maps, but not in B-Maps. LVD
performed similarly to RBW in C-Maps, but better in the B-Maps.
1 INTRODUCTION
Collective terrain exploration and coverage using
swarm robotics has many applications such as search
& rescue and surveillance, and in fact it keeps a
prominent role among the use cases for multi agent
algorithms (Schranz et al., 2020; Brambilla et al.,
2013).
The problem of terrain coverage by multiple
agents comprises Offline Terrain Coverage and On-
line Terrain Coverage (OTC), where online refers to
the terrain being unknown beforehand and thus ex-
plored while the algorithm is executed (Agmon et al.,
2008). In this paper we focus on OTC, and we argue
that many great algorithms have been proposed for
terrain coverage using swarm robotics, however they
are hardly comparable since they model their agents
in very different manners; moreover, we raise the is-
sue of the limited realism introduced by the require-
ments of some of the algorithms in terms of robot
capabilities, such as (i) the environment being con-
a
https://orcid.org/0000-0002-2338-265X
b
https://orcid.org/0000-0001-7587-531X
c
https://orcid.org/0000-0001-9594-0297
d
https://orcid.org/0000-0002-3777-9981
sidered a grid-like structure that can be maneuvered
by moving from cell to cell (Cheraghi et al., 2020;
Albani et al., 2019) where (ii) the robots cannot suf-
fer from colliding with each other; (iii) communica-
tion between robots has unlimited range and is not
blocked by walls (Kambayashi et al., 2009; Oikawa
et al., 2015); (iv) robots know each other’s location,
not impeded by walls (Kegeleirs et al., 2021), and are
provided with real-time distributed Simultaneous Lo-
calization And Mapping (SLAM) (Gonzalez and Ger-
lein, 2009a).
We propose a framework, and its accompanying
tool Multi Agent Exploration Simulator (MAES), for
taking algorithm simulations one step closer to the
real world by representing their movement space as
a continuous 2D plane, rather than a grid of cells (see
Figure 1), and for mapping the different approaches
on a common ground in terms of hardware capabili-
ties of the robots.
To showcase the approach, we first of all (Section
2) provide information regarding selected algorithms,
namely Spiraling and Selective Backtracking (SSB)
from (Gautam et al., 2018), Local Voronoi Decom-
position for Multi-Agent Task allocation (LVD) from
(Fu et al., 2009), The Next Frontier (TNF) from (Co-
Andreasen, M., Holler, P., Jensen, M. and Albano, M.
Comparison of Online Exploration and Coverage Algorithms in Continuous Space.
DOI: 10.5220/0010975900003116
In Proceedings of the 14th International Conference on Agents and Artificial Intelligence (ICAART 2022) - Volume 1, pages 527-537
ISBN: 978-989-758-547-0; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
527

Figure 1: Left: An agent moving in continuous space in
MAES. Right: a traditional grid based simulation.
lares and Chaimowicz, 2016), and Random Ballistic
Walk (RBW) from (Kegeleirs et al., 2019), the latter
being used as a baseline for the comparisons.
Section 3 delves into the mapping of the algo-
rithms onto a continuous space, and other design de-
cisions needed to map the algorithms on a common
comparison framework.
Section 4 describes the MAES tool
1
, which was
developed to demonstrate our approach. It is based
on the Unity physical engine (Unity Technologies,
2021), and allows to simulate the algorithms on build-
ing maps (B-Map) featuring hallways and rooms, and
cave maps (C-Map) full of irregular shapes. The tool
allows for visual inspection for easier debugging and
comparison of implemented algorithms, and draws
comparisons in terms of coverage and exploration,
which we define in Section 2.1.
Results of simulations performed on both B-map
and C-map are reported in Section 5, and Section 6
draws conclusions and proposes future work, both in
terms of extension of the MAES simulator, and re-
garding the application of our framework to more sce-
narios.
Summarizing, the main contributions of this paper
include:
• A mapping SSB, LVD and TNF to continuous
space and on common hardware capabilities (Sec-
tion 3)
• MAES, a simulation tool for testing algorithms in
continuous space and on common hardware capa-
bilities. (Section 4)
• A comparison of the performance of the mapped
algorithms in a realistic simulator. Since the algo-
rithms have different hardware requirements, this
also provides insight into the benefit of extra hard-
ware capabilities. (Section 5)
1
A video demonstration of MAES can be
found at https://youtu.be/lgUNrTfJW5g. MAES is
open source and the source code can be found at
https://github.com/MalteZA/MAES.
2 BACKGROUND INFORMATION
This section prepares the scene for the rest of the pa-
per, by defining a few key concepts formally, and de-
scribing and comparing the algorithms we focus on.
2.1 Definitions
Definition 1. A grid space G is a movement space
where for any given position x ∈ G, x ∈ (Z ×Z).
Movement in a grid space consists of discrete
steps from cell to cell. A step can only move an agent
from its current cell to one of its immediate neigh-
bours. There are four or eight possible movement
directions, depending on whether diagonal steps are
allowed.
Definition 2. A Continuous space C is a movement
space where for any given position x ∈ C , x ∈ (R×R)
In a Continupus space, if an agent moves a dis-
tance of d in any direction between time t
1
and t
2
,
it will passy by uncountably infinitely many possible
positions x in that time range.
Definition 3. An agent’s physical body has an area
that covers (or ’shadows’) some movement space, and
Coverage describes the amount of accumulated area
that an agent’s body-area has physically covered dur-
ing the process of moving through a movement space.
Definition 4. An agent has a field of view (FOV)
which covers (or ”shadows”) a circular area of the
movement space. Exploration describes the amount
of accumulated open area an agent’s FOV has cov-
ered during the process of moving through a move-
ment space.
Definition 5. Simultaneous localization and map-
ping (SLAM) is constructing and updating a map of
explored area in a movement space, while simultane-
ously keeping track of an agent’s position within it.
Definition 6. Environment tagging refers to leaving
information at some position in the environment, that
can be used for indirect communication with other
agents.
2.2 Algorithms
2.2.1 Random Ballistic Walk
Random walk describes a category of approaches
where agents randomly alternate between rotating and
moving straight ahead. Random Walks require that
the agents be able to detect collision, move straight
ahead and rotate in place. Some variations also re-
quire the ability to estimate how far they have trav-
elled since the previous rotation.
SDMIS 2022 - Special Session on Super Distributed and Multi-agent Intelligent Systems
528

In (Kegeleirs et al., 2019), several variations on
random walks are compared including Brownian mo-
tion, L
´
evy Walk, and RBW. In RBW, the straight
movement continues until the agent collides with ei-
ther an obstacle or another agent. According to
(Kegeleirs et al., 2019) RBW produce the best results
for coverage and mapping of unknown environments,
and thus RBW was selected as the baseline for the
comparison with more sophisticated algorithms.
2.2.2 Spiraling and Selective Backtracking
In the SSB (Gautam et al., 2018) algorithm, the agents
perform coverage by traversing sections of the map
following inward spiral patterns.
The SSB algorithm is designed for a grid space,
and movement is modelled as discrete steps between
cells. SSB also assumes that agents can communicate
globally. Finally, the algorithm design is rooted in the
assumption that agents are able to accurately build a
map of their environment and continually synchronize
this map across all agents. These two requirements
reduces the usability in real world scenarios.
In the SSB algorithm agents alternate between two
states: spiraling and backtracking. In the spiraling
state, agents follow a simple set of rules to traverse an
area in the pattern of an inward spiral. While spiral-
ing, the agents make note of neighbouring unexplored
cells as potential back-tracking points. Once spiraling
is completed the agent broadcasts its collected back-
tracking points to all other agents. Then, the agent
determines which backtracking point to choose as its
target by performing an auction where agents bid on
available backtracking points. Each agent calculates a
bid based on its distance from the backtracking point.
If an agent is in spiraling mode during an auction, its
bid values will also depend on the estimated number
of steps required to finish the ongoing spiral. If the
agents wins a backtracking point, it will travel to that
point and then begin the spiraling phase again. If the
agent does not win any backtracking points it will still
travel to the closest candidate to avoid being idle.
2.2.3 Local Voronoi Decomposition
The idea behind LVD (Fu et al., 2009) is to achieve
task allocation using only indirect communication in
the form of the position of visible agents and obsta-
cles.
Each agent computes Voronoi regions from the ar-
eas of the map within line of sight (usually 360 de-
grees around the agent) at a given time, using other
agents’ location and walls/obstacles within line of
sight. The visibility range is not mentioned in the
original paper, but the illustrations in (Fu et al., 2009)
seem to indicate that it is infinite, so we will in this
paper assume infinite visibility range for LVD.
In LVD, an occlusion point is defined as a corner
or obstacle where the line of sight is broken. All LVD
agents employ local SLAM to detect areas that they
have themselves previously covered, as well as previ-
ously covered occlusion points.
Pseudo code of the LVD algorithm can be seen in
Listings 1 and 2. The agents see the map as a grid
of tiles, which are explored when an agent has visited
it
2
. A tile can be within view but not explored yet.
Listing 1: LVD Algorithm 1 - Divide and Conquer.
1 // Divide part
2 For each cell in view
3 if the cell is closer to agent than to other agents
4 mark the cell as within region
5 end if
6 end for
7 // Conquer part
8 if there is just one unexplored cell within region
9 move to it
10 else if there are more than one unexplored cell
11 move in an ordered list, e.g. [North, East, South, West]
12 else
13 Enter Search Mode
14 end if
15 go to 1
Listing 2: LVD Algorithm 2 - Search Mode.
1 // Consider all occlusion points within view.
2 if at any time an unexplored cell appears within region then
3 exit Search Mode and go back to Algorithm 1
4 end if
5 if there is at least one occlusion point which has not been
visited during the Search Mode→
6 move to the nearest occlusion point which has not been
visited→
7 else if all occlusion points have already been visited
8 move to the least recently visited occlusion point
9 else if there are no occlusion points or if the only occlusion
point has just been visited→
10 move to the nearest Voronoi boundary which does not
11 coincide with any obstacle
12 end if
In its Divide and Conquer Mode, the algorithm
considers that agents sense other agents close by and
then use this information to divide the currently visi-
ble tiles into Voronoi regions, i.e. always delegating
a given tile to the agent closest to it. Each division
is computed independently by the agent. If any tiles
within a given agent’s Voronoi region are unexplored,
the agent will move to them in a configurable order,
e.g. first north, then east, south and west. If no tile is
unexplored, the agent enters the Search Mode.
In the Search Mode the agent considers occlusion
points within line of sight, and it moves to an occlu-
2
Thus, LVN definition of explored correspond to what
this paper defines as covered.
Comparison of Online Exploration and Coverage Algorithms in Continuous Space
529

sion point that is likely to lead to an area with unex-
plored tiles. If all occlusion points have been visited
during the current phase of Search Mode, the agent
moves to the least recently visited one. If no occlusion
point is within line of sight, or they have all been vi-
sited recently, the agent moves to the nearest Voronoi
boundary which does not coincide with an obstacle,
in order to search for new unexplored tiles, while also
possibly ”pushing” other agents further out and away
from the already explored area. If at any time during
the Search Mode an unexplored tile comes into line of
sight, the agent exits Search Mode and returns to the
Divide and Conquer Mode.
2.2.4 The Next Frontier
TNF (Colares and Chaimowicz, 2016) is a frontier-
based exploration algorithm that works by detecting
and moving to boundaries between explored and un-
explored areas (frontiers). TNF prioritizes frontiers
through a combination of factors that are combined in
a utility function
U( f ) = Inf( f ) + Dist( f ) − Coord( f ) (1)
where f is a frontier, Inf( f ) is an Information Fac-
tor (prefer higher concentrations of cells of interest),
Dist( f ) is a Distance Factor (prefer frontiers at a cer-
tain configurable distance away), and Coord( f ) is a
Coordination Factor (dismiss frontiers that are close
to other agents). TNF agents can detect and map out
the local environment through SLAM, and can merge
maps with other agents when they are within commu-
nication distance. The TNF paper does not mention
any specific range requirements in regard to commu-
nication and area detection.
The Information Factor is used to prioritize cells
that are likely to contribute more valuable informa-
tion by being explored. An uncertain cell sitting in a
large concentration of other uncertain cells in a fron-
tier should be more valuable to explore than a single
uncertain cell in a completely discovered area. A cells
occupancy-value is seen as a number between 0 and
1, where 0 is a free cell, 0.5 an unexplored cell and
1 an occupied cell, and the cell’s contribution to the
Information Factor is modeled as a non-normalized
Gaussian function centered on 0.5. The Information
Factor of a frontier f can then be calculated as
Inf( f ) =
∑
c∈ f
G(c) +
∑
n
i
∈N
G(n
i
)
!
(2)
where G is the Gaussian function mentioned previ-
ously, N is all neighbours of cell c, and n
i
is the i
th
neighbour of c.
The Distance Factor is based on the idea that an
agent might prefer to prioritize frontiers at a certain
distance over others. The distance of a frontier is
calculated using what is referred to as a ”wavefront”,
starting from the position of the agent going towards
the frontier. This distance is then normalized to a
value (a real number) between [0..1], and the final
Distance Factor is calculated as
Dist( f ) = wavefront( f )
α−1
× (1 − wavefront( f ))
β−1
(3)
where α and β are the configuration parameters used
to control at which distance a frontier is favored. The
TNF authors found the most promising results using
the configurations (α = 3, β = 9), (α = 5, β = 9), or (α =
8, β = 8).
The Coordination Factor is the final part of the
Utility Function, where an agent will prefer to explore
frontiers that are relatively far away from neighbour-
ing agents. Once again, a Wavefront Function is used,
but this time the starting position is of a neighbouring
agent, and this Coordication Factor is calculated for
each neighbour the agent can see at the time of calcu-
lation.
2.2.5 Requirements Summary
Table 1 lists the agent capability requirements for
each of the algorithms. The Environment Tagging and
SLAM criteria for LVD are parenthesized because the
functionality required by LVD can be achieved using
either one, as described in subsection 2.2.3.
Table 1: Requirements for each algorithm.
Collision Det.
Object Det.
Env. tagging
SLAM
Distri. SLAM
Local Com.
Global Com.
RBW 3
LVD 3 3 (3) (3)
TNF 3 3 3 3 3
SSB 3 3 3 3 3 3
2.3 Related Work
The simulation of multiple agent coverage algorithms
in realistic simulation settings is a relatively unex-
plored research area. Only few papers can be found
in the bibliography on this topic.
In (Gautam et al., 2018) a comparison of cov-
erage performance is provided for existing algo-
rithms with reduced communication range. This
paper compares SSB, Multiple-Depth-First-Search
(MDFS), Brick & Mortar (BNM), Boustrophedon and
backtracking mechanism (BOB) and Backtracking
SDMIS 2022 - Special Session on Super Distributed and Multi-agent Intelligent Systems
530

Spiral Approach - Cooperative Multi Robot (BSA-
CM). SSB achieved the best results. The comparison
is, however, performed in a grid base simulation us-
ing only two different maps - a basic and a Cluttered
map.
In (Gautam et al., 2021), SSB, BOB, and BSA-
CM are compared with different communication
range restrictions and number of agents. The algo-
rithms are compared in terms of coverage and redun-
dant coverage using hardware FireBird V robots on
a small plane. SSB and BSA-CM performs similarly
and better than BOB in terms of avoiding redundant
coverage.
3 MAPPING TO CONTINUOUS
SPACE
LVD and SSB operate in a grid space, where the cell
size is roughly equal to the size of the agent, and this
section describes a mapping from continuous space
to grid space for them. Moreover, other issue can ap-
pear when mapping the algorithm to a more realistic
framework, such as by considering that agent can ac-
tually collide with each other. Finally, TNF leaves
some design parameters to be defined , and this sec-
tion takes care of this detail too.
Both LVD and SSB use SLAM, and the mapping
can be implemented by overlaying a grid on top of
their environment map in the Continuous Space. Each
tile in the overlay is considered either open or solid,
with the entire tile considered solid if any part of a
solid object is detected within the bounds of the tile.
For SSB, this grid overlay and accompanying tile sta-
tuses are synchronized along with the map itself.
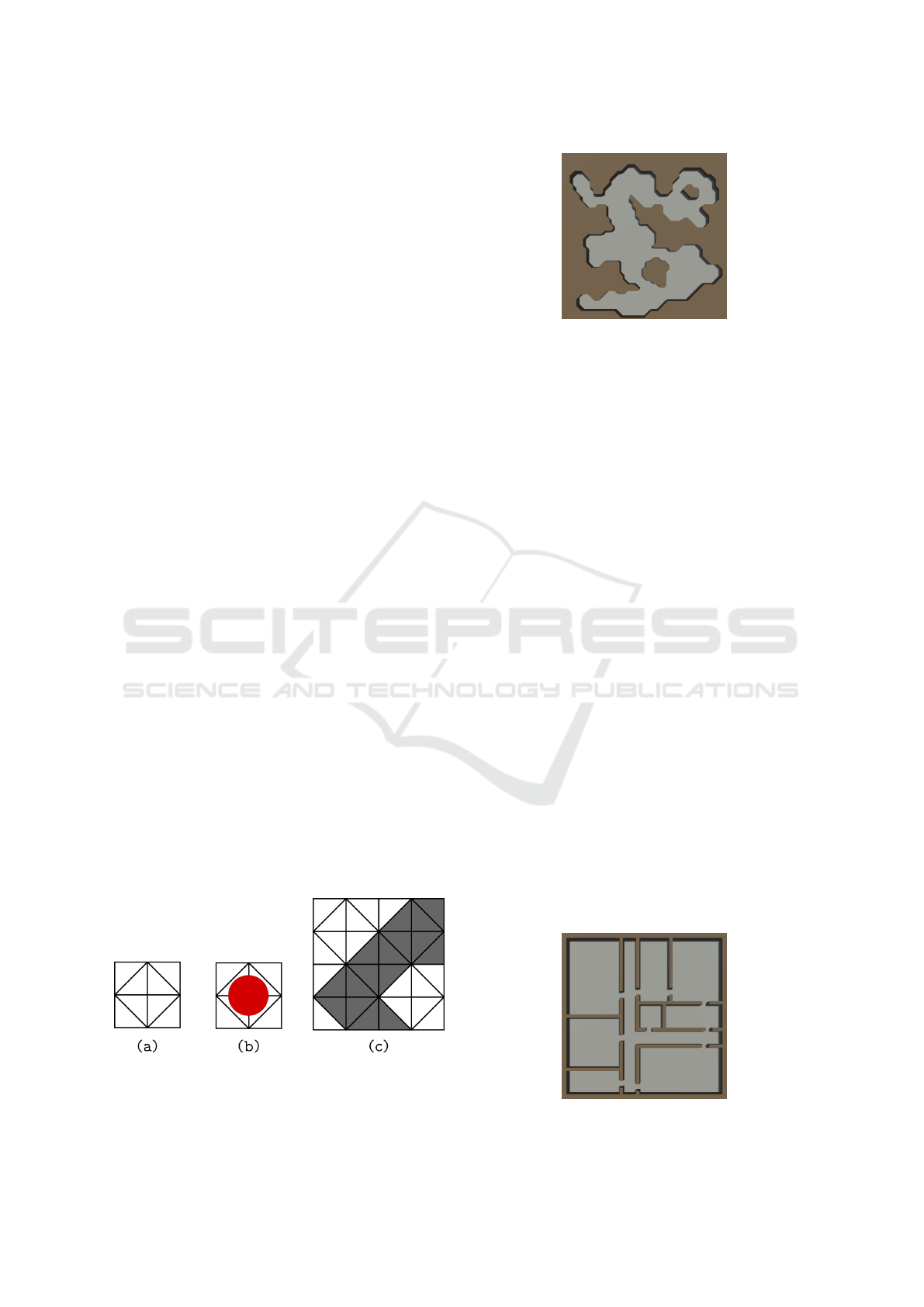
The above approach limits maneuverability, as
otherwise traversable areas may be marked as solid,
depending on the alignment of the grid. An illustra-
tion of this problem can be seen in Figure 2 where
(a) shows the environment map constructed by an
agent. The agent could comfortably fit through both
the west and east openings. However, as illustrated
in (b), the alignment of the grid can change perceived
traversability of the openings, if the tiles are too big.
To guarantee that the grid will always provide an
opening through a passage, the passage must be at
least as wide two tiles, as illustrated in (c). Similarly,
to guarantee open tiles in diagonal passages, the pas-
sages must be at least twice as wide as the diagonal of
a tile. This approach also reduces the area that will be
covered, as some free area will be perceived as solid
by the agent, thus not needed to be covered.
Figure 2: Illustration of grid overlay. (a) An agent (red) in a
Continuous Space with obstacles (black). (b) A grid overlay
with large tiles. Red tiles are perceived as solid and grey
tiles as traversable. (c) A more fine grained grid overlay.
3.1 Selective Spiraling and
Backtracking
SSB is built upon an algorithm called BSA-CM (Gon-
zalez and Gerlein, 2009b). Apart from the aforemen-
tioned grid mapping approach, BSA-CM assumes
collision avoidance to be trivial, as all agents can
move at the same time in discrete steps between cells.
In our simulation, on the other hand, coordination and
timing issues arise, as an agent may partially occupy
up to four cells at the same time. To avoid collisions,
we introduce a tile reservation system, where agents
will secure a reservation for a tile before moving
into it. Reservation requests are broadcast to nearby
agents, and after a time delay, the reservation is as-
sumed to be accepted. To avoid delaying movement
unnecessarily while waiting for reservations, agents
in our implementation will attempt to predict their
path, and reserve several tiles in advance.
Multiple agents may attempt to reserve the same
tile at the same time, in which case the conflict is
resolved by accepting the reservation from the agent
with the highest id.
3.2 Local Voronoi Decomposition
The mapping of LVD to continuous space leads to a
series of challenges, which are not present in the orig-
inal paper since it uses Grid Space.
3.2.1 Empty Voronoi Regions
In a grid, an agent’s Voronoi region will never be
empty in terms of tiles, since the tile on which
the agent stands is always contained in the agent’s
Voronoi region. In continuous space, however, an
agent can be positioned in-between other agent that
are closer to the center of tiles and thus own them, see
Figure 3. We solved this issue by having the center
agent stay idle, since the surrounding agents will have
their respective Voronoi regions reach out from each
of the four corners and thus eventually move away
and set the center agent free.
Comparison of Online Exploration and Coverage Algorithms in Continuous Space
531
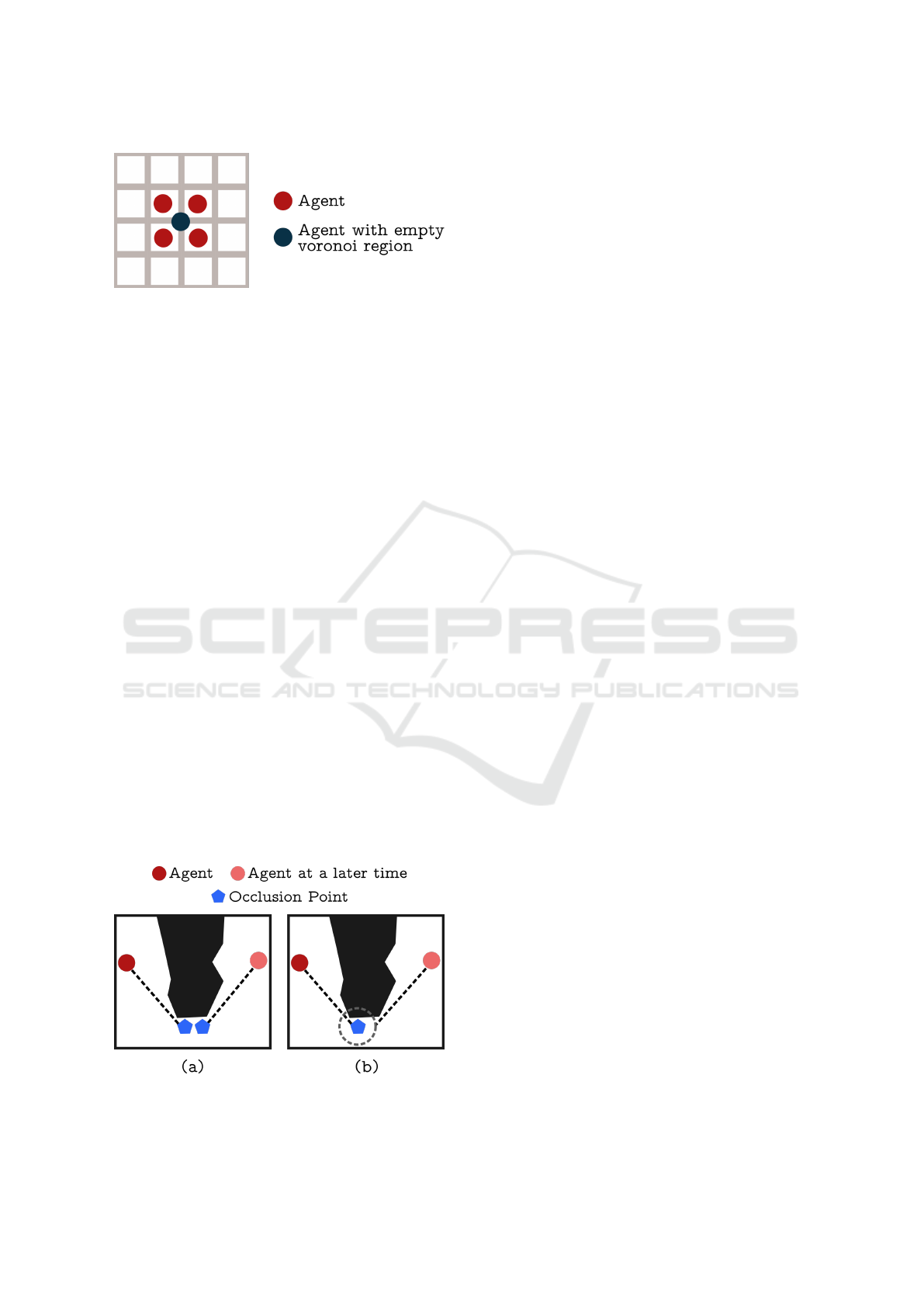
Figure 3: Illustration of an agent with an empty voronoi
region.
3.2.2 Calculation Interval
In LVD the agents move in a grid using discrete move-
ment, and recalculate the Voronoi regions after ev-
ery discrete move. However, this is not possible in
continuous space, as a change in position may be in-
finitesimally small. This begs the question of when to
recalculate Voronoi regions and find the next task to
complete. We decided that an agent would recalculate
whenever it collides with anything, or if it reaches the
tile it was heading for.
Additionally, LVD mandates, that an agent should
exit Search Mode whenever an unexplored tile comes
into line of sight. It would be unfeasible to look for
unexplored tiles at every infinitesimally small step
of movement. We decided to recalculate periodi-
cally at a given interval, even if they have not col-
lided or reached their current target. The interval is
shorter while in Search Mode to make it likely that
the agent exits Search Mode as soon as an unexplored
tile comes into line of sight.
3.2.3 Occlusion Points with Multiple Visits
In Search Mode the agent first explores all occlusion
points within line of sight. In continuous space with a
high resolution slam map it can, however, be difficult
to keep track of which occlusion points have been vi-
sited. When visiting occlusion points, the agent heads
Figure 4: (a) An agent identifying the same occlusion point
as two distinct points (b) Two points are considered the
same point, and the agent will not revisit the occlusion point
for the closest occlusion point it sees, which can how-
ever result in multiple visits to the same occlusion
points. Consider Figure 4(a), where the agent sees
an occlusion point and thus moves to this point and
around the obstacle. Now, however, the agent sees the
same occlusion point but from a different perspective.
Due to the shape of the obstacle the previous occlu-
sion now appears to be a new occlusion point, since
it is slightly offset to the right. This causes the agent
to revisit an already visited occlusion point. In order
to avoid this issue, we consider all occlusion points
within some distance of each other to be the same (see
Figure 4(b)).
3.3 The Next Frontier
TNF was originally designed to operate in a continu-
ous space. As mentioned in Section 2.2.4, TNF sees
the environment as a set of cells, where the boundaries
between the fully explored cells and the unknown
cells make up the frontiers to move to. However, a
design decision is required regarding how to imple-
ment the components of the Utility Function.
In order to prioritize cells where an agent is the
least certain of the cell’s state (i.e. cells with an In-
formation Factor contribution close to 0.5), the au-
thors of (Colares and Chaimowicz, 2016) made use of
a non-normalized Gaussian function centered around
0.5. However, the authors only mention the center
of the function’s peak, and do not specify its height
nor its deviation. For our implementation, we assume
a function peak of 5 and a deviation of 0.1, as this
seems to produce a usable behavior.
With regards to the Distance Factor, the TNF au-
thors mention the use of a wavefront function to mea-
sure the distance from an agents position to the cells
of a frontier, without providing much details on how
to build it. For our implementation, we assume eu-
clidean distance (L
2
norm) to each of the cells, as this
is consistent with how a wavefront is depicted in the
paper. With regards to the normalization of the dis-
tances to the frontiers to values between [0, 1], we as-
sume that a wavefront is normalised by identifying
the most distant cell’s distance D
MAX
, and dividing
the distance of every other cell by D
MAX
. As men-
tioned in Section 2.2.4, the final Distance Factor value
is configurable with the variables α and β. For this
implementation, we chose to use one of the authors’
suggested configuration of (α = 8, β = 8).
We implemented the Coordination Factor by sum-
ming up the results for each neighbouring agent.
We acknowledge that other approach might be vi-
able, for example dividing each wavefront distance
by the number of known neighbours. Finally, to take
SDMIS 2022 - Special Session on Super Distributed and Multi-agent Intelligent Systems
532
into consideration collisions between two (or more)
agents, we use a mitigation-procedure that implies
that, after a collision, each agent looks in its imme-
diate surroundings, and go to a location that is free
and not occupied by another agent.
4 THE MAES TOOL
This section describes the MAES tool, which we de-
veloped for conducting the experiments shown in Sec-
tion 5. MAES is a deterministic 2D discrete time-
step physics-based simulation, visualized in 3D. The
simulator uses the Unity Engine (Unity Technolo-
gies, 2021), for visualization and physics simulation.
Physics are simulated at a rate of 100 ticks per simu-
lated second. The reaction time of the agent, i.e. how
often the agents apply their exploration algorithms to
the current data, is 10 ticks.
MAES features a map generator than can gener-
ate two types of maps, i.e. the cave map type (C-
Map) and the Building map type (B-Map). MAES
provides an agent control interface that allows im-
plementation of exploration algorithms. This inter-
face provides access to movement controls, commu-
nication, object detection and SLAM. MAES allows
many of its feature to be configured, and it takes
parameters for agent constraints, for physics simu-
lation, and for map generation. A list of all pos-
sible parameters for the simulator can be seen on
https://github.com/MalteZA/MAES, where the code
is made available to the public.
4.1 Environment Maps
In order to study useful settings, MAES generates ran-
dom maps fitting the characteristics of B-maps and C-
maps.
A map consists of a number of tiles, where each
tile consists of 8 triangles arranged, as shown in Fig-
ure 5(a). An agent can be up to as big as a tile. In Fig-
Figure 5: The tile structure of the map. (a) The arrangement
of the of 8 triangles forming a single tile. (b) The size of an
agent relative to tile. (c) Four tiles, where solid triangles
form an obstacle.
Figure 6: An example of a 50x50 generated cave map.
ure 5(b) an agent with size 0.6 times a tile is shown.
Finally, each triangle may be open or solid, where
open tiles are freely traversable and solid triangles are
impassable. Obstacles with complex shapes can be
formed by chaining solid triangles as shown in 5(c).
4.1.1 Cave Map Type
The C-map type is relevant for example for the use
cases of exploration and search & rescue in an irregu-
larly shaped environment. The C-map generator starts
by randomly distributing wall and room type cells in a
grid of a given size. It then uses neighbour smoothing,
based on rules similar to Conway’s Game of Life, to
create sections of walls and rooms, e.g. a tile with 4 or
more solid neighbour tiles will turn solid and the other
way around. Now the generator can interconnect all
rooms (groups of open tiles) created while ensuring
that every part of the cave is reachable from every
other part. In order to make the cave more realistic
and irregular we use the Marching Squares algorithm
to round off edges. An example image of a C-map
can be seen in Figure 6.
4.1.2 Building Map Type
The B-map type is relevant for simulating use cases
such as floor cleaning and search & rescue in build-
ings. The generated maps are made to look like the
floor plan of a building. The B-map generator creates
a grid of a given size and marks each cell as being
either wall, hallway or room. The generator starts by
Figure 7: An example of a 50x50 generated building map.
Comparison of Online Exploration and Coverage Algorithms in Continuous Space
533

Figure 8: The 3D model of the MONA-inspired agent used
in MAES.
connecting all the hallways, then it recursively splits
the spaces between to hallways to create rooms, with
room size defined at random. Finally all the rooms are
connected to each other with doors in such a way that
all rooms are reachable from the hallways. Figure 7
shows an example of a B-map.
4.2 Agents
Within MAES, an agent’s capabilities can vary de-
pending on the parameters that describe the simula-
tion at hand, e.g. limited vision, broadcasting range
etc. An image of the 3D model of an agent, inspired
by the MONA robots (Arvin et al., 2019), can be seen
in Figure 8.
4.2.1 Movement
An agent is able to rotate in place and moving straight
ahead, and the agent is not able to rotate while moving
forwards. Movement is simulated through the Unity
2D Physics Engine by applying force at the position
of each wheel. This simulation accounts for inertia,
drag, and collisions with obstacles and other agents.
The agents of the MAES simulator can reach a top
speed of 3 tiles / second (or 10 logic ticks). The tile
size can vary depending on the scale of the map. We
decided that the agent takes about 30 physics ticks to
reach its top speed. Drag is a function of speed, which
in combination with inertia results in non-constant ac-
celeration, leading to an agent reaching half its top
speed (about 1.5 tiles / second) after just 4 ticks.
4.2.2 Sensors and Communication
Agents are able to sense other agents at a given dis-
tance, which is a simulation parameter. In order to ac-
commodate variety of scenarios with differing hard-
ware capabilities, the signal sensing other agents can
also be configured to be blocked by walls, i.e. requir-
ing line of sight. Agents detect collisions with walls
and with other agents, and can detect a nearby wall
and the angle to said wall. This could for example
be achieved using a LIDAR scanner in the real world.
Agents can communicate through broadcasting, and
both communication range and the capabilities to pass
walls is defined via simulation parameters. Line of
sight is determined using ray tracing. Beyond line of
sight and maximum range, no other signal loss is sim-
ulated.
Finally, agents can drop tags on the ground to de-
posit information in the environment and communi-
cate indirectly with other agents, as required for ex-
ample by LVD (Section 2.2.3). Tags can only be
dropped at an agent’s current position, but data can
be written to and read from at a configurable distance.
4.2.3 Simulated SLAM
If enabled, the agent can provide an environment map
generated via SLAM to the algorithm being simu-
lated. SLAM is simulated by performing a series of
ray traces from the position of the agent, and measur-
ing the distance that the rays traveled before collid-
ing. This emulates the behavior of technologies such
as LIDAR scanners.
The agent continuously constructs a ”SLAM map”
using the ray tracing information when it becomes
available. If any object is detected within the region
of a tile, then that entire tile is marked as solid. If a
ray trace is sent in the direction of a tile, and no ob-
ject is found, the tile is assumed to be open, unless
previous traces indicate that it is solid. The agent has
access to an approximation of its location within the
SLAM map. The simulation can be configured to au-
tomatically synchronize SLAM maps of agents that
are within communication range of each other.
4.2.4 Interfaces
MAES is intended to support the implementation of
many different algorithms. For this reason we expose
an interface for the algorithms to control the agents
and provide access to sensor information. The in-
terface is created to allow for implementing all of
the hardware requirements mentioned in Table 1, e.g.
SLAM map, environment tagging, etc.
4.3 Debugging Features
As MAES should function as a testbed for many dif-
ferent algorithms we include a wide variety of debug-
ging tools. A menu is included for controlling the
camera view over the simulation, as well as changing
the simulation speed. Additionally, agents can be in-
dividually selected, which makes the camera follow
SDMIS 2022 - Special Session on Super Distributed and Multi-agent Intelligent Systems
534

the agent as well as reveal debugging information in
a side bar regarding the selected agent.
Furthermore, slam maps, communication, and en-
vironment tagging can be visualized. When a simula-
tion is running the surface of the map is highlighted
in green if any agent at any point has explored it. If an
agent is selected, the surface reveals in blue the tiles
included in the slam map for said agent. The slam
map can also include sections of the map revealed by
other agents, if slam synchronization is enabled and
the two agents have been within communication dis-
tance of each other. Environment tagging is visualised
using colored boxes on the ground where an agent has
tagged the environment.
5 EXPERIMENTS AND RESULTS
For quantifying performance we use two metrics:
coverage and exploration, explained in Definition 3
and Definition 4 respectively. The coverage metric is
important for purposes like robotic lawn mowers and
cleaning robots such as autonomous vacuum clean-
ers, where the robots need to efficiently and precisely
cover areas. The exploration metric is important for
agents when exploring an area to generate a navigable
map of the environment, or in search & rescue scenar-
ios where it is vital to quickly explore large areas.
As described in Section 4.1 a MAES map consists
of tiles, where each tile consists of 8 triangles. Ex-
ploration is measured in triangles, and a triangle is
considered to be explored when an agent’s simulated
Lidar trace has intersected with the triangle. Cover-
age is measured in whole tiles, and a tile is considered
covered once the center point of an agent has entered
the bounds of the tile.
For both B-map and C-map, in order to test the
scalability of the algorithms, we simulated different
map sizes, namely 50x50, 100x100 and 200x200. We
used an agent size of 0.6 tiles. We run each algorithm
20 times for 60 simulated minutes, each with a differ-
ent random seed, leading to different maps. If an al-
gorithm reaches a coverage of 99.5% (or TNF reaches
an exploration of 99.5%), the simulation ends before
the 60 minute mark. Each algorithm has its own agent
constraints as showed on Table 1. For example, SSB
assumes global communication, while LVD does not
need direct communication at all.
5.1 Building Scenario
According to Figure 9, LVD leads in exploration for
the first few minutes after which SSB takes the lead
Figure 9: Comparison of algorithm performance in terms of
exploration and coverage for the building type map of size
50x50. Average results of 20 random seeds.
in the C-map with a size of 50x50. In terms of cov-
erage, SSB performs the best and has the map fully
covered on average after about 5 minutes. RBW and
LVD achieve similar coverage with a slight advantage
to LVD.
Figure 10 shows the results for the 200x200 map
can be seen. Here TNF achieves the best result in
terms of early exploration. SSB, however, eclipses the
exploration performance of TNF after about 30 min-
utes. LVD and RBW are significantly behind on ex-
ploration and neither manages to finish within 60 min-
utes. LVD achieves a slightly better result than RBW
in terms of exploration. SSB achieves the fastest cov-
erage and finishes on average after about 37 minutes.
RBW and LVD reaches about 56% and 64% coverage
respectively after 60 minutes.
We omit the results for 100x100 B-maps, since
they were intermediate between the 50x50 and the
200x200 B-maps.
Figure 10: Comparison of algorithm performance in terms
of exploration and coverage for the building type map of
size 200x200. Average results of 20 random seeds.
Comparison of Online Exploration and Coverage Algorithms in Continuous Space
535
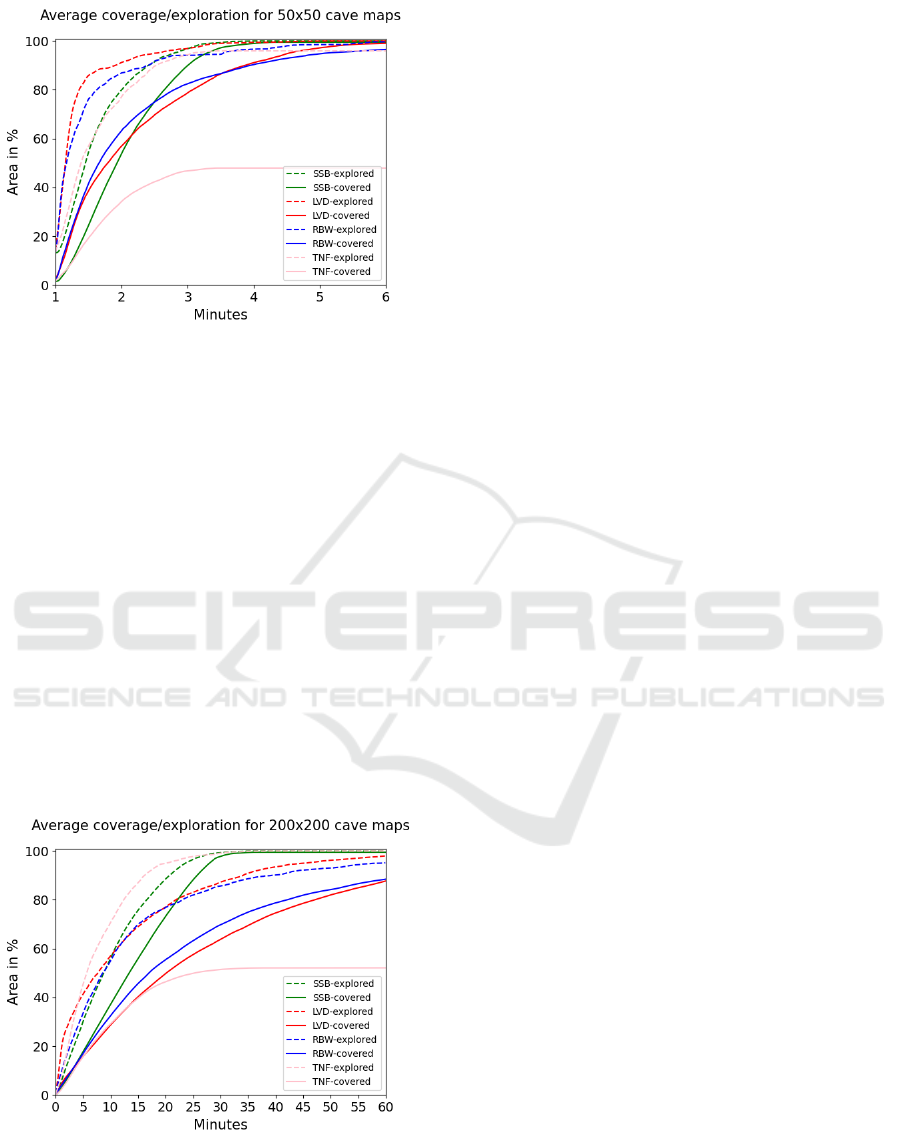
Figure 11: Comparison of algorithm performance in terms
of exploration and coverage for the cave type map of size
50x50. Average results of 20 random seeds.
5.2 Cave Scenario
In Figure 11 it can be seen, that LVD explores the
fastest, followed by RBW and then TNF and SSB. In
terms of coverage SSB is slightly faster with RBW
and LVD both finishing last after about 6.5 minutes.
The results for the 200x200 C-map, seen on Fig-
ure 12, has TNF exploring the map the fastest, fol-
lowed by SSB. LVD and RBW achieves similar ex-
ploration rates. SSB covers the larger map signifi-
cantly faster than the other algorithms. Neither RBW
nor LVD finishes the coverage within the 60 minutes
of the simulation. RBW and LVW both manage about
83% coverage.
We omit the results for 100x100 C-maps, since
they were intermediate between the 50x50 and the
200x200 C-maps.
Figure 12: Comparison of algorithm performance in terms
of exploration and coverage for the cave type map of size
200x200. Average results of 20 random seeds.
6 CONCLUSIONS AND FUTURE
WORK
The paper proposes a continuous space mapping for
the SSB, LVD and TNF algorithms, and presents the
open source simulation tool MAES, which can be
used for developing and evaluating exploration algo-
rithms in a continuous 2D space. The mapped algo-
rithms were implemented and compared statistically
through repeated runs with randomly generated maps.
RBW was implemented as a baseline for comparison
with other the algorithms.
In terms of coverage, SSB performed significantly
better than the other algorithms in both B-map and C-
map types. This performance comes at the cost of
reduced realism, as SSB assumes global communica-
tion and distributed SLAM capabilities.
TNF shows good results for exploration, exceed-
ing other algorithms in large maps for both B-map
and C-map types. TNF does, however, also require
distributed SLAM to operate.
LVD achieves slightly better results in terms of
coverage and exploration in most maps than RBW
while only using strictly local information.
Future work will consider to implement more
state-of-the-art algorithms, and propose algorithms
tailored on the realistic framework we propose. More-
over, there are aspects of the algorithms that can be
further studied such as scalability with respect to the
number of agents, and the effect of lower visibil-
ity and transmission ranges. Finally, the MAES tool
can benefit from more development, such as to allow
for batch (no UI) and distributed simulations for en-
hanced performance.
ACKNOWLEDGEMENTS
This work was partly founded by the TECH fac-
ulty project “Digital Technologies for Industry 4.0”,
Aalborg University, and by the Villum Investigator
Project ”S4OS: Scalable analysis and Synthesis of
Safe, Small, Secure and Optimal Strategies for Cyber-
Physical Systems”.
REFERENCES
Agmon, N., Hazon, N., and Kaminka, G. A. (2008). The
giving tree: constructing trees for efficient offline and
online multi-robot coverage. Annals of Mathematics
and Artificial Intelligence, 52(2):143–168.
Albani, D., Manoni, T., Arik, A., Nardi, D., and Trianni,
V. (2019). Field coverage for weed mapping: toward
SDMIS 2022 - Special Session on Super Distributed and Multi-agent Intelligent Systems
536

experiments with a uav swarm. In International Con-
ference on Bio-inspired Information and Communica-
tion, pages 132–146. Springer.
Arvin, F., Espinosa, J., Bird, B., West, A., Watson, S., and
Lennox, B. (2019). Mona: an affordable open-source
mobile robot for education and research. Journal of
Intelligent & Robotic Systems, 94(3):761–775.
Brambilla, M., Ferrante, E., Birattari, M., and Dorigo, M.
(2013). Swarm robotics: a review from the swarm
engineering perspective. Swarm Intelligence, 7(1):1–
41.
Cheraghi, A. R., Abdelgalil, A., and Graffi, K. (2020). Uni-
versal 2-dimensional terrain marking for autonomous
robot swarms. In 2020 5th Asia-Pacific Conference
on Intelligent Robot Systems (ACIRS), pages 24–32.
IEEE.
Colares, R. G. and Chaimowicz, L. (2016). The next fron-
tier: Combining information gain and distance cost for
decentralized multi-robot exploration. In Proceedings
of the 31st Annual ACM Symposium on Applied Com-
puting, SAC ’16, page 268–274, New York, NY, USA.
Association for Computing Machinery.
Fu, J. G. M., Bandyopadhyay, T., and Ang, M. H. (2009).
Local voronoi decomposition for multi-agent task al-
location. In 2009 IEEE International Conference on
Robotics and Automation, pages 1935–1940.
Gautam, A., Richhariya, A., Shekhawat, V. S., and Mohan,
S. (2018). Experimental evaluation of multi-robot on-
line terrain coverage approach. In 2018 IEEE Interna-
tional Conference on Robotics and Biomimetics (RO-
BIO), pages 1183–1189.
Gautam, A., Soni, A., Singh Shekhawat, V., and Mohan,
S. (2021). Multi-robot online terrain coverage un-
der communication range restrictions – an empirical
study. In 2021 IEEE 17th International Conference on
Automation Science and Engineering (CASE), pages
1862–1869.
Gonzalez, E. and Gerlein, E. (2009a). Bsa-cm: A multi-
robot coverage algorithm. In 2009 IEEE/WIC/ACM
International Joint Conference on Web Intelligence
and Intelligent Agent Technology, volume 2, pages
383–386. IEEE.
Gonzalez, E. and Gerlein, E. (2009b). Bsa-cm: A multi-
robot coverage algorithm. In 2009 IEEE/WIC/ACM
International Joint Conference on Web Intelligence
and Intelligent Agent Technology, volume 2, pages
383–386.
Kambayashi, Y., Ugajin, M., Sato, O., Tsujimura, Y., Ya-
machi, H., Takimoto, M., and Yamamoto, H. (2009).
Integrating ant colony clustering method to a multi-
robot system using mobile agents. Industrial Engi-
neering and Management Systems, 8(3):181–193.
Kegeleirs, M., Garz
´
on Ramos, D., and Birattari, M. (2019).
Random walk exploration for swarm mapping. In Al-
thoefer, K., Konstantinova, J., and Zhang, K., editors,
Towards Autonomous Robotic Systems, pages 211–
222, Cham. Springer International Publishing.
Kegeleirs, M., Grisetti, G., and Birattari, M. (2021). Swarm
slam: Challenges and perspectives. Frontiers in
Robotics and AI, 8:23.
Oikawa, R., Takimoto, M., and Kambayashi, Y. (2015).
Distributed formation control for swarm robots using
mobile agents. In 2015 IEEE 10th Jubilee Interna-
tional Symposium on Applied Computational Intelli-
gence and Informatics, pages 111–116. IEEE.
Schranz, M., Umlauft, M., Sende, M., and Elmenreich, W.
(2020). Swarm robotic behaviors and current applica-
tions. Frontiers in Robotics and AI, 7:36.
Unity Technologies (2021). Unity Real-Time Development
Platform | 3D, 2D VR & AR Engine. https://unity.
com/.
Comparison of Online Exploration and Coverage Algorithms in Continuous Space
537
