
Platform-independent Specifications for Robotic Process Automation
Applications
Carlos Jorge Martelo Correia
1
and Alberto Rodrigues da Silva
2
1
Instituto Superior Técnico, Universidade de Lisboa, Lisboa, Portugal
2
INESC-ID, Instituto Superior Técnico, Universidade de Lisboa, Lisboa, Portugal
Keywords: Robotic Process Automation, Controlled Natural Language, Writing Styles, Software Robot,
Domain-specific Modelling.
Abstract: Robotic Process Automation (RPA) is an emerged technology that uses software robots to automate human-
intensive repetitive tasks, traditionally associated with bureaucratic and low-complexity processes. This
article introduced a concrete scenario implemented with three popular RPA tools (i.e., UiPath, Robocorp, and
Robot Framework), which supported the research. First, the paper introduces informally that scenario,
implemented with the platform-specific languages of these tools, namely with keyword-based scripts and
other visual models. The challenge addressed in this paper is how to describe RPA applications (or just soft
robots) in a platform-independent way, close to natural language, and easily understandable by technical and
non-technical people. Established on the preliminary results, we conclude that adopting controlled natural
languages based on use cases and scenarios simplifies the specification and development of RPA scenarios,
no matter the supported RPA tool. For future works, we intend to use the best notation to specify robots in a
platform-independent way and implement transformation mechanisms for the proprietary format of popular
RPA tools such as UiPath, Robot Framework, and Robocorp.
1 INTRODUCTION
Organisations need to adopt the latest technological
improvements to remain competitive, particularly in
their information technologies (IT), supporting their
business processes. To achieve this goal,
organisations must optimise their IT resources and
alignment with their bureaucratic processes
(Chakraborti et al., 2020). In this scope, Robotic
Process Automation (RPA) is a technology that
supports automation with software robots (bots) that
replace back-office human tasks that are repetitive,
tedious, or prone to errors by humans.
RPA is a technology that mainly uses “software
(ro)bots” to automate the work done by humans.
These software bots can execute workflow with
multiple steps and interact with several applications.
Examples of tasks performed by software bots are
automated email query processing, data transfer
between applications through screen scraping,
updating a spreadsheet.
Cost increased productivity and time reduction is
the main benefits of RPA applications(Houy et al.,
2019; Jovanović et al., 2018; Romao et al., 2019).
Software robots focus on specific tasks such as
creating a monthly report in a few minutes, which
humans manually could last several hours. Regarding
the increase of productivity, RPA robots can
complete the same volume of work doing more with
a small number of resources. Furthermore, it
improves accuracy because end-users are human, so
there is a chance for mistakes. Finally, increase
security through the RPA robot because there is no
worry of information leakage from one part to
another.
RPA tools are progressively adopted and used in
the most competitive organisations. However, one
problem when using distinct RPA tools is that there is
no standard way of writing or specifying software
robots and in a tool-independent way. Therefore, to
discuss this issue, we informally introduce a concrete
case study in which we have developed, i.e., the Navy
Integrated Cataloguing System (NICS), implemented
in three RPA tools (i.e., with UiPath, Robocorp, and
Robot Framework).
The key goal of this paper is to research writing
practices to describe software bots in an RPA
platform-independent approach, close to natural
Correia, C. and Rodrigues da Silva, A.
Platform-independent Specifications for Robotic Process Automation Applications.
DOI: 10.5220/0010991200003119
In Proceedings of the 10th International Conference on Model-Driven Engineering and Software Development (MODELSWARD 2022), pages 379-386
ISBN: 978-989-758-550-0; ISSN: 2184-4348
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
379
language, so that they can be understandable by both
technical and non-technical people. To support this
research, we propose two types of writing software
bots based on specification languages inspired by: use
case scenarios (da Silva, 2021) and pseudocode
specifications (Oda et al., 2016).
This paper is organised into six sections. Section
2 introduces the background of this research,
including RPA technology and tools, and the
relevance of textual notations used in this research.
Section 3 describes the Case Study, presenting the
informal requirements and a general overview of the
leading business processes. Section 4 presents and
discusses two types of writing RPA robots in a
platform-independent way. Section 5 refers to these
robots” implementation based on three popular RPA
tools. Finally, Section 6 presents the conclusion.
2 BACKGROUND
This section introduces RPA tools and textual
notations to describe soft robot-based applications in
a high-level and platform-independent format.
2.1 RPA Tools
This section introduces the RPA tools used in this
research: UiPath, Robot Framework, and Robocorp.
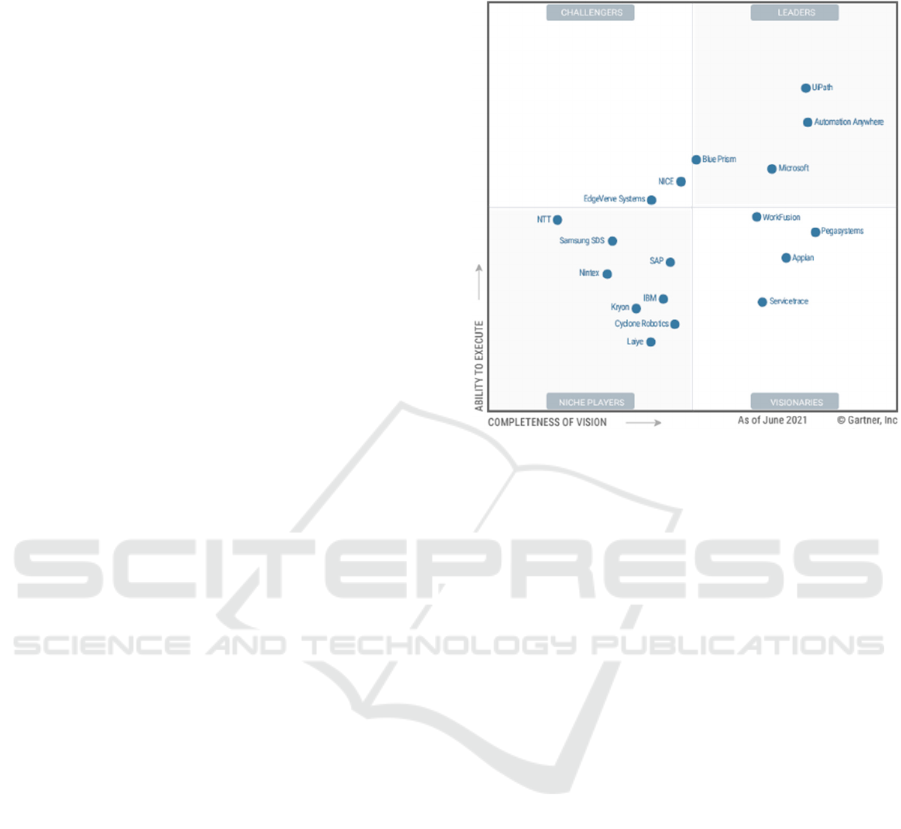
According to the Gartner report (July 2021)
(Saikat Ray, 2021), the market leaders are UiPath,
Automation Anywhere, and Blue Prism, shown in
Figure 1. Gartner describes the RPA market for
licensed software platforms used for developing
scripts. RPA platforms program repetitive, rule-
based, and liable tasks.
These reports assess relevant RPA tools based on
the following criteria: (i) Enable citizen developers to
build automation scripts; (ii) Integrate with enterprise
applications, primarily via UI scraping; (iii) Have
orchestration and administration capabilities,
including configuration, monitoring, and security.
RPA tools offer advanced capabilities like
intelligent document processing, process mining, and
discovery. In addition, RPA tools also have emerging
features and capabilities, such as a low-code user
experience (UX) for building UI front ends for bots;
and headless or serverless orchestration of
automation workflows.
Open-Source RPA tools provide a solid
groundwork to develop own customised robots
without being connected with a commercial vendor,
whose technology offers limited capabilities and high
direct costs (Hüller et al., 2021). Open source
solutions can go further into the RPA tools without a
significant investment in software.
Figure 1: Magic Quadrant for RPA (Saikat Ray, 2021).
2.1.1 UiPath
UiPath (UP) Platform services offer governance
features, a citizen-developer-friendly UiPath StudioX
(UX). This profile is for business users looking to
automate tasks. Ideal for users with limited or no
experience writing code), a more complex profile,
namely UiPath Studio (US) (For users looking to
build complex unattended or testing automation. Ideal
for users prior programming experience), enhanced
computer vision, and cloud-orchestrated RPA (Saikat
Ray, 2021).
UiPath is deployed worldwide and has the
resources and partnerships to develop its platform by
enabling end-to-end automation programs. At the
beginning of 2021, UiPath decided to purchase Cloud
Elements, an enterprise integration platform as a
service vendor, which signals the importance of UI-
based and API-based integration for scalable process
automation initiatives.
UiPath has the following strengths: Strong brand
position recognised among RPA technology. UX app
for automation: UiPath’s product portfolio includes a
low-code UX app builder, Ui-Path Apps, which helps
create business value by interfacing with various
cloud and on-premises applications. Viability: UiPath
demonstrates strong viability and strong revenue
growth of 63% from 2019 to 2020. The vendor’s
community of more than 1 million users reflects its
massive customer and partner ecosystem.
MODELSWARD 2022 - 10th International Conference on Model-Driven Engineering and Software Development
380

On the other hand, its weaknesses are: it still lacks
a web-based RPA development environment; it has
built a narrative around hyperactive automation and a
range of complementary capabilities. However, many
competitors that have entered the RPA market from
adjacent software sectors provide capabilities that
may surpass or match UiPath’s offering, especially in
terms of complex orchestration, decision automation,
and case management. Pricing: UiPath’s pricing and
packaging strategy change, as evidenced by its
introduction of developer persons and subsequent
elimination of them within one year.
2.1.2 Robot Framework
Robot Framework (RF) is an open-source automation
framework used for test and robotic process
automation. The Nokia Networks developed the first
version in 2005. RF is written in Python and is an
open framework that can be virtually integrated with
any other tool and is free to use without licensing
costs (Roveda et al., 2017).
RF uses a straightforward syntax, applying
human-readable keywords and, for that reason, does
not require expert skills in coding. Moreover, it is
possible to create new libraries implemented with
Python, which allows the expansion of its resources
(Hocenski & Stresnjak, 2011).
RF code describes test cases format, written using
keyword-based scripts in a tabular format and written
in plain text or tab-separated values.
The benefits of RF are: (Hocenski & Stresnjak,
2011) it is an open-source tool; easy to understand
and more intuitive due to keywords, and it is possible
to develop scripts in Python and Java.
The disadvantages of RF are that its installation
requires all packages, drivers and library separately
installed; do not provide debugging capability
(meaning that is not available the option to use
breakpoints); its IDE shows some issues, e.g., it
crashes when using the tabular and “text editor”
mode.
2.1.3 Robocorp
Robocorp (RC) is a tool for creating software robots
based on the Robot Framework (RF), the automation
mentioned above (Robocorp, 2021).
In RC, it is possible to build software robots using
RF, Python, or both. RC is a virtual Python
environment based on Conda, an open-source
package management system and environment
management system. RC has similar advantages and
disadvantages with the above-mentioned for RF.
2.2 Controlled Natural Languages
This section briefly introduces controlled natural
languages for writing use case scenarios and
workflows based on pseudocode notations.
A controlled natural language (CNL) is a
straightforward way to communicate with a
constrained version of a natural language. That
includes a constrained vocabulary, grammar syntax,
and writing styles (da Silva, 2017), (da Silva & Savić,
2021). CNLs can improve communication among
humans, mainly for non-native speakers of the
corresponding natural language. In addition, the
constraints on a natural language make it easier for
computers to analyse such texts to improve computer-
aided, semi-automatic, or automatic translations into
other languages.
The advantages to adopting CNLs are that their
sentences are easy to understand, are semantically
correct, and can be computationally manipulated.
Concerning the writing of use cases and use case
scenarios, da Silva discusses several linguistic
patterns and guidelines to help engineers write them
rigorously and systematically (da Silva, 2021). Spec.1
shows a partial specification of a use case scenario as
discussed in (da Silva, 2021).
UseCaseuc_1_ManageInvoices
[…]
0.ScenarioMainScenario(Main):
1.System:ShowsalistofInvoicesand
availableactions,namelyCreateInvoice,
UpdateInvoice,ConfirmPayment,SendInvoices,and
PrintInvoice.Inaddition,thereareactionsto
Closetheinteractionspace,Select/Unselect
Invoices,SearchInvoices,andFilterInvoices.
2.Actor:BrowsesthelistofInvoicesand
consultInvoices
3.Actor:SelectstheoptionClose.
Spec. 1: Partial specification of a use case scenario [from
(da Silva, 2021).].
Pseudocode is a popular technique to describe an
informal and high-level computer program or
algorithm (Oda et al., 2016). Pseudocode writes in
symbolic code translated into a programming
language before being executed.
Pseudocode aims to be more accessible for people
to understand than conventional programming
languages code, and it shows in a platform-
independent format the main principles of such
algorithms. For instance, Spec. 2 presents the
description of an algorithm in pseudocode written in
English. It is usually used in textbooks and scientific
publications to document algorithms and plan
software and other algorithms (Roy, 2006).
Platform-independent Specifications for Robotic Process Automation Applications
381
Definethefunctionfizzbu zzwithanargumentn.
ifnisnotanintegervalue,
throwaTypeErrorexceptionwithamessage…
ifnisdivisibleby3,
ifnisdivisibleby5
return‘fizzbuzz’
else
‘fizz’
elseifnisdivisibleby5,
return
thestring‘buzz’.
Otherwise,
returnthestringrepresentationofn.
Spec. 2: Example of pseudocode written in English [from
(Oda et al., 2016).].
3 CASE STUDY
The NICS (Navy Integrated Cataloguing System)
describes a fictional scenario of an application used
to manage the parts supply of the navy ships.
The creation of this application occurred in 2019
with the main task of cataloguing articles/parts on
navy ships. Articles refer to parts of the navy ship’s
equipment. The application allows the search for
articles/parts in three different ways, namely: ”by free
research”, “by equipment research”, or “by
article/part research”. Each article/part has detailed
information about its history and associated
documents. It is worth mentioning that the entire
history of articles from 2011 onwards was loaded into
the application’s database, considering that all
associated documentation was in digital support.
However, articles/parts documentation before
2011was handwritten, and, for that reason, they were
not possible to be loaded. A back-office operator was
in charge of digitising all this missing documentation,
approximately 78.000 articles/parts documents, and
providing the IT team to upload it into the system.
After two years daily of work dedicated to this task,
this employee only processed around 10000
documents.
The following text (Spec. 3) illustrates the
informal requirements of the NICS application. With
the purpose of legibility, this text draws attention to
the following text fragments: candidate actors dashed
underline text; data entities are bold and use cases
marked as underlined text.
NICSistheshortnameforthe“NavyCataloguing
InformationSystem”,whichallowsusersto
searchforarticles/parts.Articlesreferto
partsofthenavyship’sequipment.The
applicationallowsthesearchforarticles/parts
inthreedifferentways,namely:“byfree
research”,“byequipmentresearch”,or“by
article/partresearch”.Eacharticle/parthas
detailedinformationaboutitshistoryand
associateddocuments.
Auserhasauserprofile,namelyasITManager,
backOfficeOperator,ororganizationalEntity.
AnITManagerregistersandmanagesusers[…].
AnorganizationalEntitycorrespondstoanavy
departmentresponsibleforcreatingCataloguing
documents.
[…].
Spec. 3: Partial informal requirements of the NICS.
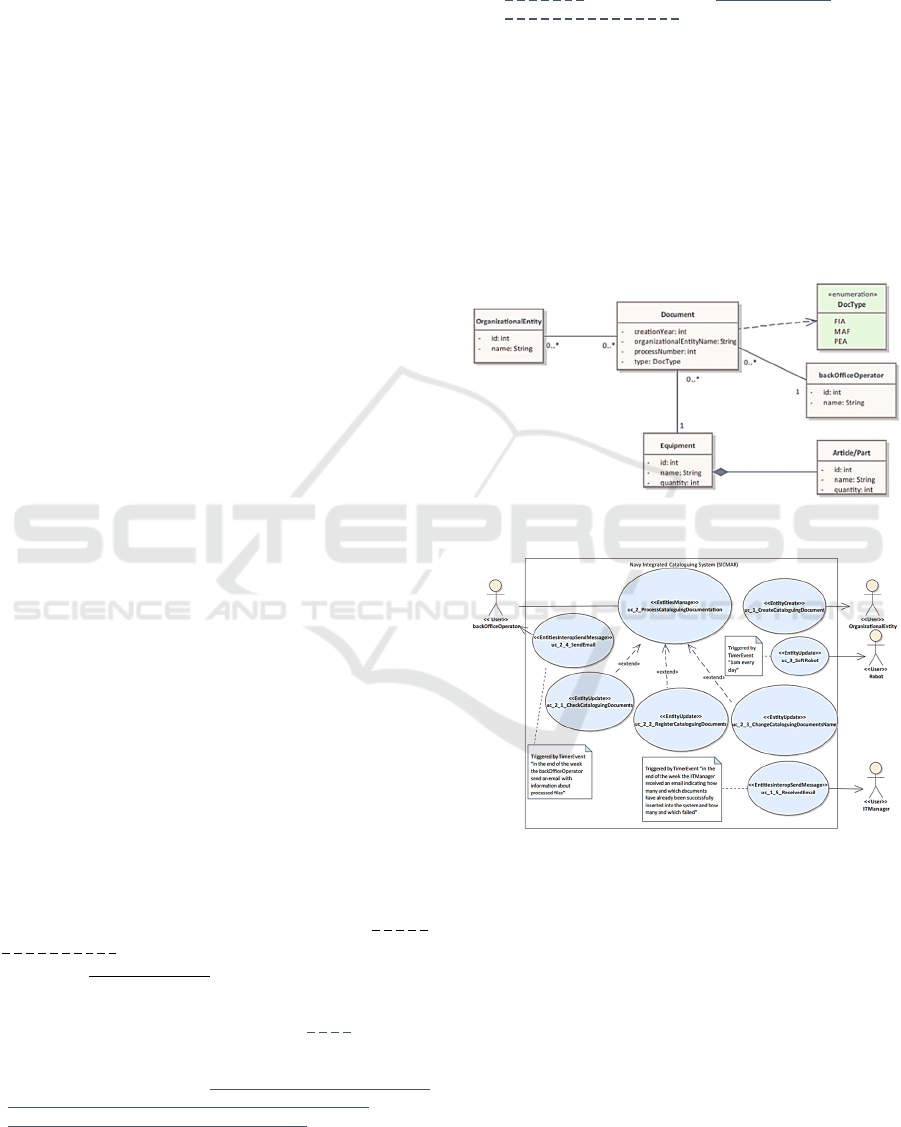
Figure 2 indicates the domain model of the NICS
application with a simplified UML class diagram, and
Figure 3 illustrates the UML use case diagram.
Finally, section 4 presents the equivalent
specification for the use case “uc_3_SoftRobot”.
Figure 2: Domain model of the NICS (UML class diagram).
Figure 3: Use case model of the NICS (UML notation).
4 ROBOTS SPECIFICATION
This section discusses how to write RPA robots in
controlled natural languages that shall be
understandable by both technical and non-technical
stakeholders. In particular, it discusses two distinct
writing styles: based on use case scenarios and based
on pseudocode.
MODELSWARD 2022 - 10th International Conference on Model-Driven Engineering and Software Development
382

4.1 Based on Use Case Scenarios
Spec. 4 describes the NICS robot with the use case
scenario writing style as discussed by (da Silva,
2021).
UseCaseuc_3_NICS_SoftRobot
[…]
ScenarioMainScenario(Main):
s1.Robot:Getthelistofdigitaliseddocuments
fromaspecificlocationfolder(ina“pdf”
format),withfilenamesoutsidethestandard
format.
S2.Robot:Readandconverteachdocumentfrom
“pdf”into“txt”format,usingOCRtechnology
withascaleofzero.
S3.Robot:BrowsesthelistofDocumentsand
openseachoneofthemin“txt”format.
S4.Robot:Foreachdocument,extractandinsert
inanexcelfilethefollowingtextfragments:
documenttype,organisationalentity
(responsiblefordocumentcreation),process
number,andcreationyear.
S5.Robot:Inaddiction,insertinto
theexcel
filethepathwhereisthedocument.
S6.Robot:Getthedocumentfilenameinthe
correctstandardformatfromtheExcelfileand
changethefilenameofeachone.
S7.Robot:Ifthedocumentfilenameisinthe
correctformat,uploadthefileintothedata
storeof
theNICSapplicationandmoveittothe
ProcessedDocumentFolder.
S8.Robot:Ifthedocumentfilehasanincorrect
formatfilename,moveittotheFailedDocument
Folder.
S9.Robot:SendanemailtoITManager
specifyingsuccessfuldocumentsinsertedinto
thesystemandhowmanyhavefailed.
Spec. 4: Use cases scenario specification.
4.2 Based on Pseudocode
Spec. 5 describes the NICS robot’s main steps based
on the discussed pseudocode notation.
First, the partial text corresponds to the
declaration and initialisation of variables.
Second, it is possible to visualise the reading and
conversion of each document from “pdf” into “txt”
format, using OCR technology with a scale of zero.
Third, due to the problem of files having different
designations, for the same information (i.e., for the
document number parameter, in a document we have
<Nº: 12345> and in others <Number: 12345>), it is
necessary to standardise the expressions and to give
the same expressions to all documents, in this case,
whenever “Number:” appears, it becomes “Nº:”.
Fourth, define regular expressions to extract the
desired data, e.g., <strType>_<strEntity>_
<strProcessNumber>_<strCreationYear>.
Fifth, extracte and insert data into the Excel file.
Sixth, obtains the new filename of the document
file in the correct standard format in the excel file.
Seventh, if the filename is in the correct format,
then the filename is changed. After that, the document
file shall be uploaded to the system and moved to the
processed documents folder. Otherwise, if the
filename has an incorrect format, it is moved to the
Failed Documents folder.
Eighth, send an email to IT Manager specifying
successful documents inserted into the system and
how many have failed.
SoftRobotNICS:
//1:declarationofvariables
pdfPath=Environment.CurrentDirectory
pdfFiles=Directory.GetFiles(pdfPath,"*.pdf")
totalNumberOfPdfFiles=0
numberOfFinishedPdfFiles=0
numberOfFailedPdfFiles=0
extratedText,strtype,strNumber,strEntity,
strCreationYear,strOC,newPdfFileName,
oldPdfFileName
//2:readandconvertdocumentfilefrom
"pdf"//into"txt"format
begin
FOReachpdfFileInpdfFiles
[…]
READpdfFilewithOmniPageOCR(SCALE(0))
WRITEextractedText
ENDIF
//3:replacewrongformatinformationinthe
//documentfile
ExtratecdText=strText.Replace("Nº:","Number:")
ExtratecdText=strText.Replace("From.","From:")
ExtratecdText=strText.Replace("'","")
//4:extractinformationfromthedocumentfile
//usingregularexpressions
IFString.IsNullOrEmpty(strCreationYear)
StrCreationYear=
System.Text.RegularExpressions.Regex.Match(strTe
xt,"(?i)(?<=Data:\s)(\d{2}.\d{2}.\d{4})").Value
ENDIF
//5:write
extractedinformationfromthe
//documentfileintotheexcelfile
WRITEstrType
WRITEstrEntity
WRITEstrProcessNumber
WRITEstrCreationYear
//6:readnewfilenameintheexcelfile
READ newPdfFileName
IFcell.Length<17ORcell.Length>19OR
cell.Contains("/")ORString.IsNullOrEmpty(cell)
//7:changedocumentfilenameandmoveit
toa
//specificfolder
MOVEpdfFileINTOFailedPdfsFolder
numberOfFailedPdfFiles=
numberOfFailedPdfFiles+1
totalNumberOfPdfFiles=
totalNumberOfPdfFiles+1
Platform-independent Specifications for Robotic Process Automation Applications
383
ELSE
RENAME(oldPdfFileName,newPdfFileName)
movepdfFileINTOFinishedPdfsFolder
numberOfFinishedPdfFiles=
numberOfFinishedPdfFiles+1
totalNumberOfPdfFiles=
totalNumberOfPdfFiles+1
ENDIF
ENDFOR
//8:sendanemailtotheITManager
SENDEMAIL
end.
Spec. 5: Specification-based on Pseudocode.
4.3 Discussion
This analysis suggests that both notations could be
suitable for the purpose. In particular, the use case
scenario notation is simple but has limitations in
describing processes and lacks vocabulary, whereas
the pseudocode-based is more appropriate for describ-
ing algorithms and consequently translated into code.
Moreover, the use case scenario notation offered the
advantage of ensuring that stakeholders communicate
in the same language, as most are non-technical.
Table 1 compares the two writing styles to
describe software robots according to suitability,
expressiveness, and overall rating criteria (scores
according to the following criteria (1=weakest;
6=strongest).
Table 1: Comparative summary for the two notations.
Writing styles
Criteria
Suitabilit
y
Ex
p
ressiveness Overall Ratin
g
Use case
scenarios
5 5 5
Pseudocode 3 2 3
5 ROBOT IMPLEMENTATION
This section has two parts, the first refers to some
aspects of the NICS robot implementation, and the
second part presents an initial comparative analysis.
We decided to start this research by implementing
the NICS robot on these three RPA platforms (i.e., on
UiPath, Robot Framework, and Robocorp) in a reverse
engineering perspective, as well as to understand the
difficulties experienced by users in creating a specific
scenario on more than one RPA platform.
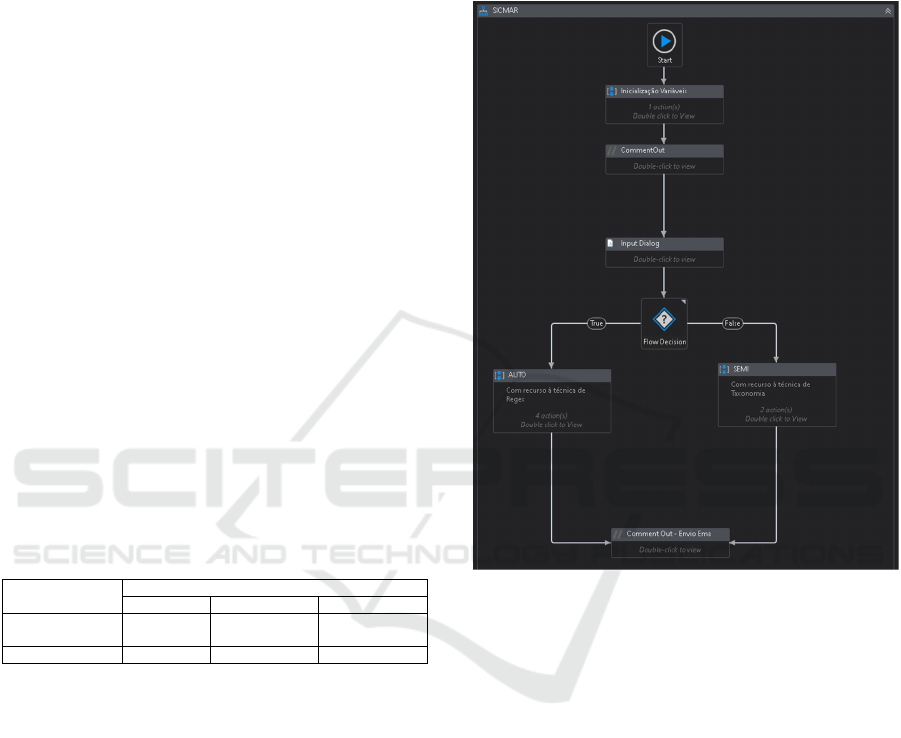
Figure 4 and Specs. 6 and 7 partially show the
implementation of the code on these three platforms.
(For more details on these implementation issues, the
reader may consult our repository at
https://github.com/Martelo39/PIS_RPA
).
The focus of this work is not on the comparison
of RPA tools but to demonstrate that each one has its
differences and specificities. Above all, in some
cases, they lack in-depth knowledge of the
programming language used by the RPA tool in
question.
Figure 4: Robot NICS defined in UiPath.
***Settings***
Libraryocr.py
LibraryOperatingSystem
LibraryString
***Variables***
[…]
***TestCases***
NICS
ocr.OcrTesseract./Output/Images
FOR${fileTxt}IN@{fileNamesTxt}
${strText}GetFile./Output/txt/${fileTxt}
[…]
@{strDate}GetRegexpMatches${strText}
(Data:..‐..‐..)
[…]
${newPdfFileName}SetVariable
${type}${underscore}${entity}${underscore}${numb
er}${underscore}${creationDate}.pdf
MoveFile./PDFs/${filePdf}
./Output/CompletedFiles/${newPdfFileName}
[…]
END
Spec. 6: Robot NICS defined in Robot Framework.
MODELSWARD 2022 - 10th International Conference on Model-Driven Engineering and Software Development
384

***Settings***
LibraryRPA.core.notebook
LibraryOperatingSystem
LibraryString
Libraryocr.py
***Variables***
[…]
***Keywords***
Processalldigitizingdocuments
ocr_tesseract./Output/Images
FOR${fileTxt}IN@{fileNamesTxt}
${strText}=GetFile
./Output/txt/${fileTxt}
@{strDate}=GetRegexpMatches
${strText}(Data:..‐..‐..)
[…]
END
***Tasks***
Process
alldigitisingdocuments
Spec. 7: Robot NICS defined in Robocorp.
Table 2: Comparison of the three used RPA tools.
RPA
Tool
Criteria
Suitability
Programming
Skills
Time
Behaviou
r
Overall
Rating
UP 6 5 5 6
RF 3 2 4 3
RC 4 2 3 3
After the assessment, it is possible to analyse the
results, summarised in Table 2 (scores according to
the following criteria: 1=weakest; 6=strongest).
Regarding the criteria Programming Skills: 1 means
nice-to-have, and 6 does not require programming
skills.
We verify that UiPath is the most suitable tool for
beginners because it does not require programming
knowledge, and it provides a visual paradigm that is
easy to read and write simple models. UiPath also
provides a vast number of features, such as the
capture-and-play feature that allows recording end-
user actions and mimics them in the same manner.
However, UiPath is more expensive than the other
tools. (For instance, purchasing UiPath for the first
time costs an extra $3k for the development
environment (Studio) and $6k/year per robot).
Robot Framework and Robocorp can be good
alternatives because they are open sources, offer code
ownership, and cost-effectively scale without
additional overheads. However, it is necessary to
know to program, and, for that reason, they are more
complex for beginners.
6 CONCLUSION
At the beginning of this project report, we describe
RPA technology, Controlled Natural Language based
on CNL-B, and Pseudocode notations. First,
however, the organisations should identify their
appropriate processes for this technology since not all
need or shall be automated. The most suitable
processes (to use RPA) are repetitive, rule-based,
low-complexity, and a high volume of tasks. One of
the essential advantages of RPA implementation is
the cost and time reduction achieved by the
organisations.
The controlled natural language like CNL-B
provides basic terms necessary to communicate and
shows some limitations in the provided vocabulary,
grammar syntax, and verb forms (da Silva, 2021).
Specifications based on pseudocode notations are
popular to describe informal and high-level computer
programs or algorithms (Oda et al., 2016).
Pseudocode writes in symbolic code and translates
into a programming language before being executed.
Both CNL-B and Pseudocode allow describing
software algorithms, supporting the development of
the program, and the maintenance of business
processes. In this way, it is possible to put the
stakeholders in the same direction, thus ensuring that
they communicate in the same language and share a
shared vision.
The research discussed in the paper uses a case
study that involved the concrete implementation of an
RPA scenario in the scope of the NICS (Navy
Integration Cataloguing System) application. That
scenario was defined in the CNL-B and Pseudocode
to decide which of the two notations fits better for
describing the RPA scenario. We concluded with this
article that using both specifications to describe in an
agnostic way the RPA NICS scenario would simplify
the development of scenarios, no matter what of the
RPA tool used. Furthermore, controlled natural
languages allow writing more systematically and
consistently and, above all, more straightforward than
the specification approach based on pseudocode, a
more technical writing approach. Given the above,
the main objective is to ensure that stakeholders
communicate in the same language, especially non-
technical ones. Therefore, we considered a
specification approach based on controlled natural
languages (CNL-B) as the most adequate.
For future work, we intend to research the
following challenges. First, use one of the notations
discussed in this article to specify robots and explore
transformation mechanisms for proprietary formats
(i.e., UiPath, Robot Framework, Robocorp). Second,
extend the ASL language (Gamito & da Silva, 2020)
to support the rigorous specification of RPA robots
based on the Xtext technology (Bettini, 2016; Fowler,
2010). Third, research and develop transformation
Platform-independent Specifications for Robotic Process Automation Applications
385

mechanisms for proprietary formats of UiPath, Robot
Framework, Robocorp. Fourth, research how to test
RPA robots on top of our recent work on model based
testing (Estivill-Castro et al., 2018; Silva et al., 2018;
Maciel et al., 2019). Fifth, use and compare other
RPA tools, like Blue Prism or Automation Anywhere.
ACKNOWLEDGEMENTS
Work partially supported by funds under FCT
UIDB/50021/2020 and 02/SAICT/2017/29360.
REFERENCES
Bettini, L. (2016). Implementing domain-specific
languages with Xtext and Xtend. Packt Publishing Ltd.
Chakraborti, T., Isahagian, V., Khalaf, R., Khazaeni, Y.,
Muthusamy, V., Rizk, Y., & Unuvar, M. (2020). From
Robotic Process Automation to Intelligent Process
Automation. International Conference on Business
Process Management, 215–228.
da Silva, A. R. (2015). Model-driven engineering: A survey
supported by the unified conceptual model. Computer
Languages, Systems & Structures, 43, 139–155.
da Silva, A. R. (2017). Linguistic Patterns and Linguistic
Styles for Requirements Specification (I): An
Application Case with the Rigorous RSL/Business-
Level Language. Proceedings of the 22nd European
Conference on Pattern Languages of Programs. ACM.
da Silva, A.R., Paiva, A.C.R., Silva, V.E.R. (2018).
Towards a test specification language for information
systems: focus on data entity and state machine tests.
Proceedings of MODELSWARD'2018.
da Silva, A. R., & Savić, D. (2021). Linguistic Patterns and
Linguistic Styles for Requirements Specification:
Focus on Data Entities. Applied Sciences, vol. 11, no.
9.
da Silva, A. R. (2021). Linguistic Patterns, Styles, and
Guidelines for Writing Requirements Specifications:
Focus on Use Cases and Scenarios. IEEE Access, vol.
9, pp. 143506-143530.
Estivill-Castro, V., Hexel, R., & Lusty, C. (2018).
Continuous Integration for Testing Full Robotic
Behaviours in a GUI-stripped Simulation. In MODELS
Workshops.
Fowler, M. (2010). Domain-specific languages. Pearson
Education.
Gamito, I., & da Silva, A. R. (2020). From Rigorous
Requirements and User Interfaces Specifications into
Software Business Applications. International
Conference on the Quality of Information and
Communications Technology, Springer.
Hocenski, Z., & Stresnjak, S. (2011). Usage of Robot
Framework in Automation of Functional Test
Regression.
Houy, C., Hamberg, M., & Fettke, P. (2019). Robotic
process automation in public administrations.
Digitalisierung von Staat Und Verwaltung.
Hüller, L., Jenß, K. E., Speh, S., Woelki, D., Völker, M., &
Weske, M. (2021). Ark Automate—an Open-Source
Platform for Robotic Process Automation.
Jovanović, S. Z., urić, J. S., & Šibalija, T. v. (2018). Robotic
process automation: overview and opportunities. Int. J.
Adv. Qual, 46(3–4), 34–39.
Maciel, D., Paiva, A. C., & Da Silva, A. R. (2019). From
Requirements to Automated Acceptance Tests of
Interactive Apps: An Integrated Model-based Testing
Approach. In ENASE'2019.
Oda, Y., Fudaba, H., Neubig, G., Hata, H., Sakti, S., Toda,
T., & Nakamura, S. (2016). Learning to generate
pseudocode from source code using statistical machine
translation. Proceedings - 2015 30th IEEE/ACM
International Conference on Automated Software
Engineering, ASE 2015, 574–584.
https://doi.org/10.1109/ASE.2015.36
Robocorp. (2021, November 15).
Open Source RPA
Solutions. Https://Robocorp.Com/Solutions.
Romao, M., Costa, J., & Costa, C. J. (2019). Robotic
process automation: A case study in the banking
industry. 2019 14th Iberian Conference on Information
Systems and Technologies (CISTI), 1–6.
Roveda, L., Ghidoni, S., Cotecchia, S., Pagello, E., &
Pedrocchi, N. (2017). EURECA H2020 CleanSky 2: a
Multi-Robot Framework to Enhance the Fourth
Industrial Revolution in the Aerospace Industry CNR-
ITIA Calibration View project EURECA H2020
CleanSky 2: a Multi-Robot Framework to Enhance the
Fourth Industrial Revolution in the Aerospace Industry.
Roy, G. G. (2006). Designing and Explaining Programs
with a Literate Pseudocode. J. Educ. Resour. Comput.,
6(1), 1–es. https://doi.org/10.1145/1217862.1217863
Saikat Ray, A. V. N. R. P. V. K. G. M. A. (2021, November
18). Magic Quadrant for Robotic Process Automation.
https://www.gartner.com
MODELSWARD 2022 - 10th International Conference on Model-Driven Engineering and Software Development
386
