
A Robust Modified Hybrid A*-based Closed-loop Local Trajectory
Planner for Complex Dynamic Environments
Chinnawut Nantabut
a
and Dirk Abel
b
Institute of Automatic Control, RWTH Aachen University, Campus Boulevard 30, Aachen 52074, Germany
Keywords:
Collision Avoidance, Autonomous Driving, Path Planning, Trajectory Planning, Object Detection, L-Shape
Fitting, Hybrid A*, Weighted A*, Stanley Controller, PID Controller, Bicycle Reciprocal Collision Avoidance.
Abstract:
In the research field of autonomous driving, planning safe and effective trajectories is a key issue, which
also requires reliable detection of objects in the environment. This publication introduces a new approach to
compute safe trajectories for automated road vehicles quickly and robustly, also considering reliable object
detection for static and dynamic objects. For this purpose, the Hybrid A* algorithm modified with Weighted
A* is used to accelerate the planning of a collision-free path because the weight w can make the heuristic
term h become more important and make the tree much more narrow in the direction of the goal. Afterwards,
PID- as well as Stanley controllers are utilized to realize reliable trajectories. This combined algorithm is
extended with the L-Shape fitting algorithm to detect objects in the environment. The entire approach is
evaluated for unstructured and semistructured environments using simulations of an automated vehicle with
a realistic interaction of dynamic obstacles in the presence of model and sensor uncertainties, guarantees a
real-time capability of 1 s, and results in collision-free vehicle movement. The whole algorithm, which yields
very promising results, will be transferred to a C++ framework and tested with flexible test vehicles in real
environments in the future.
1 INTRODUCTION
Many companies and research institutions are en-
gaged in the realization of autonomous driving, which
is very challenging because the autonomous system
must perform all functions from planning and imple-
menting driving functions to system monitoring and
emergency management. In order to avoid any col-
lision in any case, it is essential that the system has
an exact scene understanding of the static environ-
ment and the complex behavior of dynamic obstacles.
The resulting trajectories, which the system calculates
based on the current traffic situation, must be adjusted
permanently in real time by means of a closed con-
trol loop. Normally, path or trajectory planning ap-
proaches are validated only for structured (infrastruc-
ture is previously known), unstructured environment
(obstacles are detected online) or semistructured (the
combination of both cases). In our case, we consider
both types of environments where obstacles have to
be detected and the replanning is oftentimes activated
when needed. Furthermore, we take into account the
a
https://orcid.org/0000-0002-5767-6023
b
https://orcid.org/0000-0003-0286-3654
interactions of all traffic participants for more realistic
test scenarios. Recently, researchers are mainly de-
veloping methods to tackle the following problems:
scene understanding, trajectory planning and trajec-
tory control. The implemented methods then perform
well either in complex dynamic environments, which
must be permanently observed, or in structured envi-
ronments, whose layout may already be known in ad-
vance. In most scientific work, dynamic obstacles are
considered challenging due to their poorly predictable
behavior, but the movement must still be considered
at all times. Most works in literature focus only on
the planning of collision-free paths that can simply
be driven using a feedforward controller which does
not continuously prove if the desired behavior is ac-
tually reached or not. If dealing with collision avoid-
ance, many papers describe non-convex optimization
problems to deal with unstructured and cluttered en-
vironments. But the calculated path is probably local
minimal or it is quite time-consuming due to the non-
convex search space. In order to be more specific and
to identify development needs, an overview of rele-
vant scientific work is given next.
26
Nantabut, C. and Abel, D.
A Robust Modified Hybrid A*-based Closed-loop Local Trajectory Planner for Complex Dynamic Environments.
DOI: 10.5220/0010997800003191
In Proceedings of the 8th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2022), pages 26-35
ISBN: 978-989-758-573-9; ISSN: 2184-495X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

The path planning method can be categorized into
graph-based and sample-based methods (Paden et al.,
2016), (Gonz
´
alez et al., 2016). Other approaches use
neural networks or stochastic methods, e.g., evolu-
tional strategies and can be combined with conven-
tional methods to optimize the results (Patle et al.,
2019). For the graph-based approaches, Dijkstra or
A* algorithms are applicable for the problems that
are defined by a grid-based formulation. For exam-
ple, the continuous search space is partitioned into
a discrete one defined by a grid. The search space
is not infinitely large anymore and, therefore, facil-
itates the searching algorithm for finding a suitable
path. Unfortunately, there is no guarantee of find-
ing an optimal path if not enough calculation time is
provided. A*, however, does not perform well in dy-
namically changing environments because it recalcu-
lates the path always from start point to end point in
each time step. That means the method is quite com-
putationally intensive, especially when the dimension
of the search space is high. D* has been developed
then, which is able to correct the calculated path con-
sidering new obstacles on the way. Both algorithms,
still, do not consider the realistic motion behavior of
vehicles where the path to be followed is curvy. To
address this challenge, Hybrid A* first demonstrated
its successful usage on the Stanford Racing Teams
robot in the DARPA Urban Challenge in 2007 (Dol-
gov et al., 2008). They tested the implementation on
the simulated environments such as labyrinths, park-
ing lots and U-turns. A real-time Hybrid A* was
successfully implemented and evaluated for the KTH
Research concept vehicle using Dubins curve for for-
ward driving (Dolgov et al., 2010). The cost func-
tion used for smoothing a path in Hybrid A* was ex-
tended by considering the lane network of the park-
ing lot for semistructure application by combining the
topological graph search and the free-space path plan-
ning to reduce the number of expanded nodes (Kurzer,
2016). The three papers above, however, updated the
environments using SLAM as an input for the ex-
act path planning, which comes with high computa-
tional costs. Hybrid A* was applied to solve the path
planning problem in structured environments contain-
ing streets and in unstructured environments for non-
holonomous vehicles (Petereit et al., 2012). The out-
standing feature of this approach is the smooth visit
of a series of given waypoints. The obstacles were,
however, predefined and the experimental part only
observed one specific example. To increase the per-
formance of the algorithm, the visibility graph was
used for the given polygonal obstacle’s vertices to
find the optimal waypoints of the holonomic path up
to the goal region, which helps dramatically reduce
the number of expanding nodes. Here, the obstacle
configuration and the available map were pre-defined
as well (Sedighi et al., 2019). Hybrid A* was then
applied for unstructured environments, whereas state
lattice verification technique has switched to struc-
tured applications (Guirguis et al., 2019). The method
was successfully tested in simulations for lane follow-
ing tasks, but not for a cluttered environment. the
Hybrid A* was optimized for wheeled robots in con-
sideration of a collision risk with dynamic obstacles
(Nemec et al., 2019). The overall calculation time
was limited to 1 s so that the real-time capability of
the path planning was guaranteed. However, the ob-
stacles are also predefined and it is actually not clear
if the weight helps accelerate finding the path.
In the papers mentioned above, the obstacle recog-
nition part normally utilizes the occupancy grid map-
ping. However, this uses the full information of the
obstacle configuration is not necessary when we can
assume almost all of the obstacles are rectangular as
in the parking lot or street scenarios. Therefore, Hy-
brid A* as a local planner in combination with model-
based, i.e. using the geometry information, object de-
tection seems promising but has not received much
attention in any research study until now.
To acquire an accurate detection of the environ-
ment, multiple sensors, such as LiDAR, radars, and
cameras, are used in this paper combined with the
well-known L-Shape approach to detect other vehi-
cles in the vicinity. In our approach, unstructured en-
vironments are considered, for which the Hybrid A*
approach has proven to be very promising. It calcu-
lates a path using discrete steering angle values and
a kinematic model of the ego-vehicle in a discrete
search space containing position and orientation. Fur-
thermore, Weighted A*, an algorithm to accelerate
the search with a suboptimal solution, is combined,
which seems suitable for unstructured and semistruc-
tured environments. The interaction of dynamic ob-
stacles, here vehicles, is implemented using the bi-
cycle reciprocal collision avoidance method (Alonso-
Mora et al., 2012). The trajectory control is then real-
ized by applying a PID controller for velocity control
along the path and a Stanley controller for keeping the
vehicle on the track laterally.
The paper furthermore focuses on the detection
and the decision-making modules. Detected objects
can be fed into the decision-making module directly
where path and trajectory planning take place. The
decision maker performs a calculation of the path
parameterized by time to realize the trajectory plan-
ning. One hundred scenarios for each unstructured
and semistructured environment are randomly gener-
ated to validate the robustness of the approach.
A Robust Modified Hybrid A*-based Closed-loop Local Trajectory Planner for Complex Dynamic Environments
27

The approach introduced in this paper calculates
collision-free trajectories in all situations while keep-
ing the calculation time under 1 s for real-time ap-
plications. However, this assumption is valid in the
simulation when using the search algorithm because
collisions can still occur in reality, especially in the
high-speed networks as on highways. The work is
therefore applicable for the case of low-speed range
(< 10 m/s) as in parking lots.
2 METHOD
Figure 1: A workflow of the trajectory planning demon-
strated in this work is presented.
At first, the position, the orientation, the size as well
as the velocity of an ego vehicle is previously known.
A reference path is given for the vehicle to follow and
no obstacles are present. The vehicle tracks on this
given path as long as no obstacles are detected. If
that is not the case, a collision avoidance framework
presented in this paper is activated and a collision-free
path and a desired velocity are then calculated. Figure
1 summarizes the entire work consisting of three main
modules. Obstacles are defined previously, detected
and then segmented in the simulation by the sensor
of an autonomous vehicle at every time step. During
the object detection step, LiDAR data is continuously
processed using an L-Shape fitting approach to gen-
erate suitable rectangular bounding boxes for all ob-
stacles in sight. The bounding boxes are then fed to
the trajectory planning consisting of a planning and
velocity planning part. In the planning module, the
start and goal points are reasonably determined for
finding a new path using Hybrid A* in combination
of Weighted A* algorithm, in dependence on the type
of environments. They have to be far enough all of
the obstacle points for the sake of the collision avoid-
ance. The path planning algorithm is activated in case
that the obstacles stay in the way. The velocity plan-
ner then uses the distance to the next front object to
find a desired or reference velocity. The controllers
hereinafter are activated to keep the vehicle on track.
2.1 Object Detection: Sensor
Simulation
Figure 2: The points detected by the LiDAR sensor attached
on a vehicle of length L and width W are simulated.
Figure 2 illustrates how to simulate a LiDAR sensor
used in the experiments in the paper. A previously de-
fined path for the ego vehicle is given by a set of gray
circular waypoints. The detection range of the sen-
sor is provided by a gray circular arc on the black ego
vehicle. A static obstacle depicted in yellow points
is defined beforehand in the simulation. The orange
points are the ones that lying within the sensor range
and the red points are the real ones that will be pre-
processed in the object segmentation module.
The waypoints defining the path can be deter-
mined offline by using the previously known informa-
tion with a fixed goal point by, for example, a conven-
tional A* algorithm. Otherwise, the path can be just
defined by a center line of the lane in case that the ve-
hicle just follows a lane in case of a route planning.
In this paper, however, the waypoints are given and
the ego vehicle tries to track the resulting path while
keep itself away from collision with the surrounding
obstacles detected online.
Supposingly, the yellow rectangular obstacle’s
points representing both static such as vehicles stand-
ing still in a parking lot or the driving ones are prede-
fined pointwise. The orange points within the sensor
range of radius R
R
and angle ϕ
R
are considered. Only
one red point of each circular segment of angle δϕ
R
is regarded for the calculation in the upcoming part to
optimize the calculation time. All of these detected
points are then submitted to the preprocessor in order
to calculate the possible rectangular configuration of
the obstacles defined by 4 vertices for each at that mo-
ment. If at least one of the obstacle’s points is stand-
ing within the range around the predefined path, the
path planning and the control module of the frame-
work are then activated so that the ego vehicle can
avoid serious collisions.
VEHITS 2022 - 8th International Conference on Vehicle Technology and Intelligent Transport Systems
28

2.2 Object Detection: Object
Segmentation
L-Shape fitting is a model-based vehicle detection and
tracking used under the assumption that rectangle ob-
stacles are detected from the side by the laser scanner
in the form of L (Zhang et al., 2017) . The procedure
generates a sample of rotated boxes for each segment
of the point cloud and then compares them to deter-
mine which one best suits all of the points using a
minimal distance criterion. These points are the red
ones that we obtained from the procedure that we just
explained earlier.
Figure 3: An L-Shape fitting algorithm is utilized for the
detection of a rectangular obstacle.
Figure 3 demonstrates how the L-Shape fitting al-
gorithm works. One of the clusters of the prepro-
cessed point cloud, in red, from the previous sensor
simulation in Figure 2 is processed in this step, re-
sulting in the blue bounding box with the dark blue
vertices. Each green point i from this cluster is con-
sidered for comparing the distance to the bounding
box.
The coordinate system (x, y) is fixed at the sensor.
The rotated coordinate system (x
0
, y
0
) which suits the
obstacle best is to be determined. The algorithm deals
with the combinatorial least square problem described
by searching for the two perpendicular line equations
and choose which line each point of the cluster be-
longs to. Out of three criteria, the closeness maxi-
mization is utilized because of the good average time
consumption and exactness of detection (Zhang et al.,
2017). This criterion finds the configuration of the ro-
tated box the sum of which of the distance of the red
points to their closest side of the box is minimal.
Instead of directly solving the least-square prob-
lem, a brute force search is carried out to reduce the
calculation time by defining a search angle increment
θ = nδ, where n ∈Z
+
∪{0}and 0 6 θ <
π
2
. The calcu-
lation for each angle can be done parallely to improve
the real-time capability and the solution is acceptable
when the angular resolution δ is small enough. The
corresponding perpendicular line equations for point
i (green from Figure 3.) at this angle are
x
i
cos(θ) + y
i
sin(θ) = c
1,i
(1)
and
−x
i
sin(θ) + y
i
cos(θ) = c
2,i
. (2)
c
1,i
and c
2,i
are the distances of point i to the ro-
tated coordinate system which can be compared to
find the boundary of the box. This is defined by
the line equations with c
1,min
= minc
1,i
and c
1,max
=
maxc
1,i
for the first equation and c
2,min
= min c
2,i
and c
2,max
= max c
2,i
for the second equation. The
minimal distance of this point to the bounding box
d
i,min
= min(min(c
1,i
−c
1,min
, c
1,max
−c
1,i
), min(c
2,i
−
c
2,min
, c
2,max
−c
2,i
)) is calculated and the sum of this
minimal distance of each point S
θ
=
∑
d
i,min
quanti-
fies how well the current box matches the cluster. The
box at the angle of θ
min
with the smallest sum is cho-
sen. The matrix L summarizes all the coefficients of
the lines plus a repetition of the first line to determine
the four vertices.
L = [l
i, j
]
5×3
=
cos(θ
min
) sin(θ
min
) c
1,min
−sin(θ
min
) cos(θ
min
) c
2,min
cos(θ
min
) sin(θ
min
) c
1,max
−sin(θ
min
) cos(θ
min
) c
2,max
cos(θ
min
) sin(θ
min
) c
1,min
(3)
The vertex v
i
(blue) of each box with i ∈
{1, 2, 3, 4} is calculated by using the element of the
matrix L as follows,
v
i
=
1
l
i,1
l
i+1,2
−l
i,2
l
i+1,1
l
i,3
l
i+1,2
−l
i,2
l
i+1,3
l
i,1
l
i+1,3
−l
i,3
l
i+1,1
(4)
Figure 4: The start and goal configurations for determining
a collision-free path by Hybrid A* are differently chosen in
dependence of the environment types.
These four vertices of each segment are then sent
to the path planning module for the collision avoid-
ance to determine the start and goal configuration us-
ing in the path planning algorithm.
A Robust Modified Hybrid A*-based Closed-loop Local Trajectory Planner for Complex Dynamic Environments
29

Figure 4 explains how to determine start and goal
points needed for the path planning algorithm. The
points for the unstructured environments are por-
trayed in pink, while the ones for the semistructured
scenarios in red. Obstacles’ points that could lead to
potential collision danger to the vehicle are depicted
in green, while those in the safer zones are illustrated
in blue.
In case of unstructured environments, the start
point can be easily defined as the current position
and the goal point can be the end of the given path.
For semistructured cases, however, the vehicle has to
stay within the street as long as possible. All obsta-
cle points within range d
R
are projected to the orig-
inal path. Let d
s
, the safe distance from the closest
projected obstacle point, first equal to d
g
, the safe dis-
tance from the most distant projected obstacle point.
If the start point goes behind the vehicle, we then set
the start point to the current position and orientation
of this vehicle.
Figure 5: Tree expansion of the Hybrid A* algorithm is ap-
plied in order to determine an optimal collision-free path
for a nonholonomic vehicle. The tree is not expanded in
the vicinity of the obstacles and the expansion process is
stopped when the last node is in the goal area with an ac-
ceptable orientation deviation.
2.3 Planning: Path Planning with
Modified Hybrid A*
Hybrid A* calculates, in comparison to A*, a smooth
path comprising a set of small smooth paths from one
state to another, depicted in Figure 5 (Dolgov et al.,
2008). It uses the red start and goal configuration to
find a collision-free path based on the expansion of
the green tree starting incrementally from the current
node to its neighboring nodes and so on. As a result,
an orange optimal path is calculated.
The algorithm compares the approximated length
f of the path via each neighboring node and chooses
the most promising one with the least f . This term
can be expressed as
f = g + wh, (5)
where g is the exact path length from the start to that
neighboring node, h is the approximated path length
from the neighboring node to the goal node which
can be a heuristic and w is the weight to accelerate
the search with the greedy behavior to the goal point
which is normally used in Weighted A*.
By expanding the tree, the dark green node cannot
be added if it is too close to the obstacle points within
the range of R
coll
. The tree expansion is stopped when
the successor node is within the radius of R
Acc
and
the deviation of the orientation is within θ
Acc
. The
optimal path is then traced back from the goal to the
start node.
The original Hybrid A* algorithm employs two
admissible heuristics to find the most promising suc-
cessor (Dolgov et al., 2008), (Dolgov et al., 2010).
That means the heuristics h are not larger than the real
path length from the current to the goal node so that
the search algorithm is applicable.
The first heuristic considers the nonholonomity of
the vehicle without taking into account the obstacles
in the environments. It uses motion primitives which
can be seen as a set of short paths that can be reused in
every node expansion step by rotating in accordance
with the orientation of the current node. The inputs
of each motion primitive, i.e. the control input and
the vehicle model parameters, stay the same until the
next node is reached. Dubins or Reeds-Shepp curves
are used to accelerate the tree expansion.
The second heuristic, on the contrary, regards the
environments, but not the kinematic model of the ve-
hicle or the smoothness of the path. It uses the ”flow
field” when multiple start points are given for a cer-
tain goal point (Emerson, 2019). This can be applied
as well for the Voronoi field. This determines which
grid cell of the search space belongs to which obstacle
by using the obstacle itself as the start point.
Figure 6: The motion primitive is calculated for the tree
expansion by using the single track model for Hybrid A* as
explained in Equations (6)-(8) (Udacity, 2015).
VEHITS 2022 - 8th International Conference on Vehicle Technology and Intelligent Transport Systems
30

Instead of expanding the successors around the
current node into the next cells as in A*, Hybrid A*
uses the kinematic model to expand the tree for the
first heuristic as shown in Figure 6. Hereby, the black
vehicle is transformed into a single track model de-
picted as a ”bicycle” in gray. The new state of the
vehicle is illustrated as the black bicycle after travers-
ing the green path with a distance of length d.
The algorithm discretizes the control variables,
such as the steering angle, and determines the suc-
cessor nodes with the help of single track model for
nonholonomic vehicles. The model assumes that the
wheels of each axis are shifted to the longitudinal axis
of the vehicle and the center of mass to the ground to
reduce the degrees of freedom of the model and facil-
itate the calculation of the successor nodes depicted
in gray.
To determine the motion primitive, the algorithm
calculates first the driving angle β given the driv-
ing distance d which is the length of the diago-
nal of the cell plus an offset so that the successor
node can locate in the neighboring grid cell, wheel
base L and the steering angle α from the set of
{−α
max
, ..., 0, ..., +α
max
}, with the vehicle projected
to a single track model:
β =
d
L
tan(α). (6)
The radius R of the motion is then calculated and
used for determining the center of the circular motion
R =
d
β
. (7)
The angle from the turning center to the rear wheel
center θ in return is used for calculating the successor
node (X
0
,Y
0
)
T
.
X
0
Y
0
=
C
X
−R sin(θ) + R sin(θ + β)
C
Y
+ R cos(θ) + R cos(θ + β)
(8)
To limit the calculation time, the maximal itera-
tion is set to N
I,max
, each with the maximal steering
angle α
max
and n
α
discrete values. The tree can then
be expanded by a Dubins curve to link the node which
yields the smallest f value and the goal point. Dubins
curve use the start and end configuration, calculate the
path lengths of 6 possible movements when available,
and compare them to find the shortest path. Further-
more, we do not consider the obstacle, since practi-
cally, we still do not know how the obstacle config-
uration looks like when it is located further from the
current position. We then expand the tree from the
node that has the largest approximated cost f because
the path that ends with this node is found with the
exactness of path length quantified by f . The approx-
imated remaining path length from the Hybrid A*’s
end node to the goal point, or h, can be determined
by the simple geometry of Dubins or Reed-Shepps
curves.
Figure 7: A path calculated by the tree expansion is opti-
mized in view of four criteria.
J = w
ρ
N
∑
i=1
ρ
V
(x
i
, y
i
) + w
o
N
∑
i=1
σ
o
(|x
i
−o
i
|−d
max
)
+w
κ
N−1
∑
i=1
σ
κ
(
∆φ
i
|∆x
i
|
−κ
max
) + w
s
N−1
∑
i=1
(∆x
x+1
−∆x
i
)
2
(9)
The cost function J from Equation 9 is illustrated
in Figure 7 (Dolgov et al., 2008). It optimizes the cal-
culate path in orange, defined by N way points con-
siders the Voronoi field value σ
v
(=0 in Voronoi edges
(pink) and =1 next to and in obstacles) the distance
to the nearest obstacle | x
i
−o
i
| compared to max-
imal allowed distance (light blue) d
max
, the actual
curvature
∆φ
i
|∆x
i
|
compared to maximal allowed curva-
ture κ
max
and the vector change to the neighboring
nodes of node i. The last two terms use the infor-
mation about the current and both consecutive points
(green). The two terms in the middle are quadratic
penalties. The points are then updated by conjugate
gradient optimization (CG), which can be easily im-
plemented (Shewchuk, 1994). An oversampling of
nodes is carried out by placing one more point be-
tween two consecutive segments and re-optimized by
using the same optimization techniques.
Due to the fact that Hybrid A* rarely yields the
path that leads to the exact continuous goal configu-
ration, the end of the tree is set to the predefined goal
configuration.
2.4 Planning: Velocity Planning
In Figure 8, the controllers for both longitudinal and
lateral direction are illustrated. The desired longitudi-
A Robust Modified Hybrid A*-based Closed-loop Local Trajectory Planner for Complex Dynamic Environments
31

nal velocity of the ego v
lon
depends on the current dis-
tance d
x
from the front axis of the ego vehicle along
the path to the nearest next vehicle within the range
of d
y
. The desired velocity profile can be defined in
three sections by introducing two offsets d
x,1
and d
x,2
.
When the distance d
x
is less than d
x,1
, the vehicle tries
to stop and therefore v
lon,desired
. In the second field,
the desired velocity v
lon,desired
rises linearly with the
current distance d
x
. After the offset d
x,2
, the desired
velocity is kept constant according to the ego’s vehi-
cle desired velocity.
Figure 8: A PID controller is utilized for the longitudinal
speed control and a Stanley controller for the lateral control.
2.5 Control: Longitudinal and Lateral
Controller
As mentioned earlier, two controllers are employed,
which are illustrated in Figure 8. A PID controller
is applied for regulating the vehicle’s longitudinal ve-
locity v
lon
to be as close to v
lon,desired
as possible. The
smaller its value is, the less velocity the ego vehicle
desires to have. To eliminate the deviation of the lat-
eral distance to the path e
y
and the deviation of the
orientation ∆θ, a Stanley controller is utilized (Thrun
et al., 2006).
3 VALIDATION
We evaluate the performance of the modified Hybrid
A* in a combination of L-Shape fitting object de-
tection in the simulations for both unstructured and
semistructured environments in the presence of dy-
namic obstacles.
3.1 Simulation Setup
The implementation of Hybrid A* is based on the
open-source C# implementation (Nordeus, 2015).
However, we decided to reimplement it in MATLAB.
There are many reasons for this. Firstly, we can carry
on an analysis of the algorithm through implementing
on our own and can develope it for the future by com-
bining Hybrid A* with more algorithms from the A*
family such as Dynamic A*, Anytime Repairing A*
or even Anytime Dynamic A*. Secondly, although
MATLAB also provides a Navigation Toolbox com-
prising of Hybrid A* path planning, we cannot mod-
ify the weight inflating the heuristic as used in this
paper. Lastly, we will transfer the implemented MAT-
LAB code onto a Simulink Real-Time target used in
a host computer on our model vehicle ”Buggy” de-
veloped by our institute (Reiter et al., 2017). We use
Dubins curve instead to consider only forward move-
ments. If the Reed-Shepps curves were implemented,
which is normally used in Hybrid A*, the behavior of
node expansion would still be similar. The maximal
iteration n
I,max
for tree expansion is set to 10. The
maximal steering angle α
max
is set to 45 deg to make
the vehicle only drive forward and n
α
= 5 discrete
values. The driving distance d is set to
√
2 + 0.01
m, which is the diagonal length of each grid cell (cell
size is 1 m long) plus some offset to make sure the
successor node lies in another grid. The wheel base
of all vehicles L is 2 m. In addition, all weights w
i
of the cost function J for the optimization are set to
one for simplicity in order to equally consider all of
the components of the cost function. The weights are
needed to be tuned using machine learning methods
in the future.
We investigate the use of the modified Hybrid A*
in two types of environments as always mentioned.
The search space of size 20 m × 20 m is filled with
previously known rectangular obstacles. The two ex-
periments handle the unstructured and semistructured
environments of grid size 20 m × 20 m for a full tra-
jectory planning which consider both obstacle detec-
tion and control steps.
Figure 9 summarizes the interaction of the ego
vehicle and the obstacles in the unstructured and
semistructured environments. Hereby, the static ob-
stacles x
ob j
(green) are available for all traffic partic-
ipants. We assume that all dynamic obstacles (red)
have full knowledge of the configuration of static ob-
stacles x
ob j
. Meanwhile, the ego vehicle (blue) can
only receive partial information of static obstacles
due to the equipped sensor and can be described by
sensor
x
ob j
.
Furthermore, to model the vehicle’s interaction,
these pieces of information of another dynamic ob-
stacles are exchanged among themselves. The bicy-
cle reciprocal collision avoidance method (B-ORCA)
is utilized due to the fact that it considers the non-
VEHITS 2022 - 8th International Conference on Vehicle Technology and Intelligent Transport Systems
32
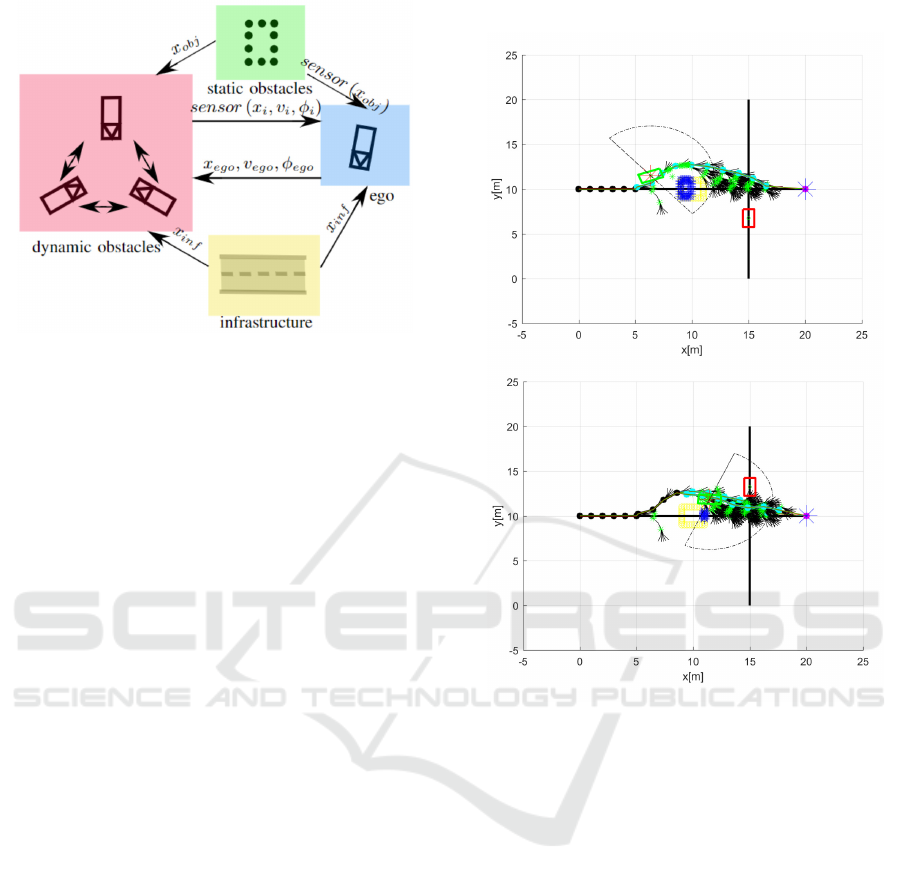
Figure 9: We test the modified Hybrid A* in both environ-
ments in the presence of static and dynamic obstacles. The
infrastructure is activated in addition for the semistructure
scenarios.
holonomic conditions of vehicles based on optimal re-
ciprocal collision avoidance (ORCA) (Alonso-Mora
et al., 2012). The vehicles interact properly to the
other vehicles which act differently, which is useful
in our case since one of the traffic participants, here
an ego vehicle, is equipped with the modified Hybrid
A* to guide its behaviour. The responsibility factor
of each dynamic obstacle to another one or to the ego
vehicle is set to 0.5 since each vehicle tries to avoid
each other or taking half of the responsibilities. The
static obstacles, on the other hand, cannot move itself
and thus have no responsibility to avoid other traffic
participants. The responsibility factor is then set to 0,
while all vehicles take full responsibility (the factor
equals 1).
Here as well, the vehicles have the full knowl-
edge of another dynamic obstacles’ configuration
x
i
, v
i
, φ
i
and the ego’s position, velocity and orienta-
tion, x
ego
, v
ego
, φ
ego
. Meanwhile, due to the equipped
sensor, the ego vehicle can only collect partial infor-
mation described by sensor (x
i
, v
i
, φ
i
).
On top of that, The infrastructure part (yellow) is
deactivated for the second case, i.e. the unstructured
environment. In this use case, the infrastructure can
be constructed as a road defined by two parallel point-
wised static obstacles with one side of length zero.
Since the infrastructure is previously known, its full
information x
in f
can be sent to all vehicles in the last
use case.
For both cases, the robustness of the modified Hy-
brid A* is evaluated by 100 random simulations each.
In the case of semistructured environment, we addi-
tionally define road boundaries with a lane width of 2
m each. Static obstacles are placed within the road,
while the vehicles try to follow their assigned lane.
3.2 Simulation Results
Figure 10: Application of the modified Hybrid A* as a local
planer in an unstructured environment: In the first part of
the figure, the ego vehicle plans the new path to avoid the
collision with the static obstacle. As soon as the dynamic
obstacle is detected, a new path is calculated as well, as in
the second part of the figure.
In Figure 10, one of the testing scenarios for an un-
structured environment is evaluated. The green ego
vehicle moves to the right, while the red obstacle ve-
hicle progresses upwards. Their predefined straight
paths are marked as black lines. As explained ear-
lier for the unstructured case, the start point in red
star falls upon the current position of the ego vehicle,
while the goal point in blue star corresponds to the
last waypoint of the track. A yellow rectangular static
obstacle is placed in the middle of the path. The blue
points are result of the L-Shaped fitting algorithm and
display a current potential danger on track for the ego
vehicle. The black branches of the tree illustrate all of
the possible route, while the green leaves demonstrate
the potential nodes within the closed list of the Hybrid
A* algorithm. At first, the ego vehicle is shifted to the
left side of the predefined path to see whether the lat-
eral displacement is later compensated by the Stanley
A Robust Modified Hybrid A*-based Closed-loop Local Trajectory Planner for Complex Dynamic Environments
33
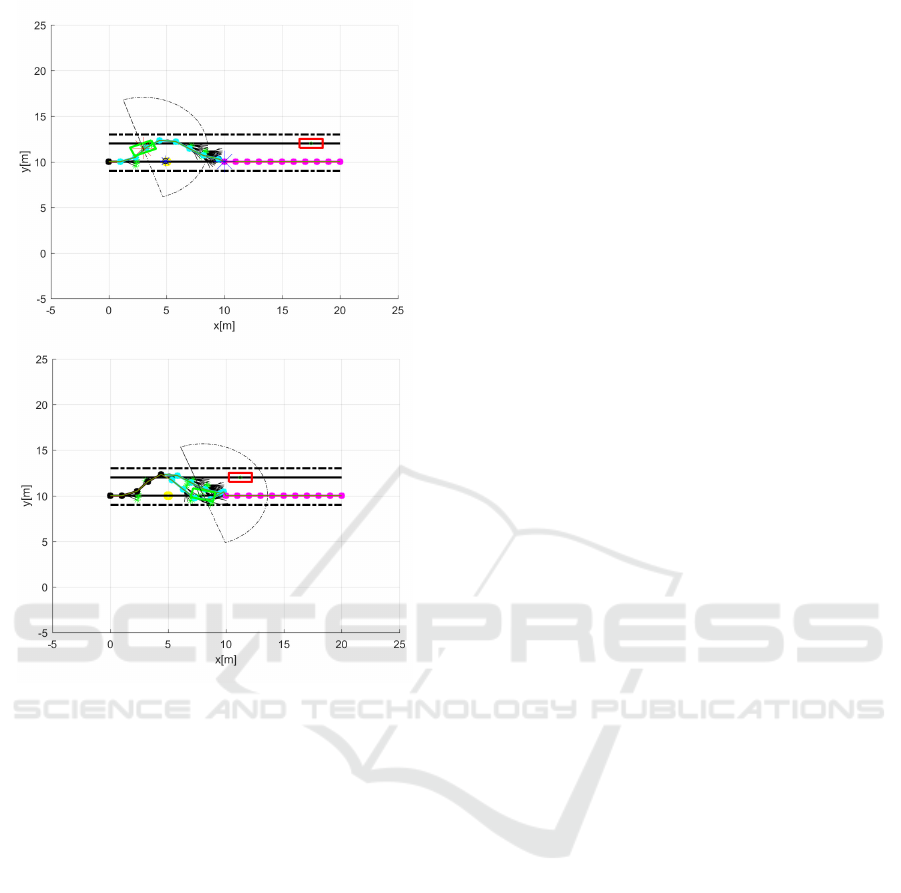
Figure 11: Application of the modified Hybrid A* as a local
planer in an semistructured environment. The scenario is
divided into two parts as in Figure 10. The road boundaries
are, however, previously known and constrain the free space
for the tree expansion.
controller. When the static obstacle is located within
the sensor range, the detected points are checked if
they could be seen dangerous to the vehicle by cal-
culating their distance to the tracked path. When the
obstacle hinders the movement of the ego vehicle, the
points detected by the sensor are feeded into the ob-
ject detection path to calculate the current obstacle
configuration using L-Shape fitting. A new path is
calculated using the modified Hybrid A* so that the
vehicle can avoid the currently detected obstacle. The
tree is expanded from start to goal points lying in the
original path. The new path is then followed using
Stanley controller while trying to keep its desired ve-
locity using an underlying PID controller. Once the
other vehicle is detected, the ego vehicle slows down
as in Figure below. However, another new path is cal-
culated so that the ego vehicle does not have to wait
until the dynamic obstacle finally leaves the danger-
ous zone. Afterwards, the ego vehicle speeds up to its
preferred speed and reach the original black path.
Figure 11 illustrates a collision avoidance for the
semistructured case by adding boundaries of the road,
marked as black dotted lines. Other illustrating el-
ements are the same as in Figure 10. Furthermore,
since the search space is limited, the procedure of
finding the path until the fixed end point in large blue
star is facilitated in comparison to the previous case.
The lila waypoints illustrates the path joining the end
point of the planning and the end of the street. An
obstacle vehicle in this case drives in another lane in
opposite direction. It is clear that the tree only ex-
pands inside of these lane boundaries. As soon as the
ego vehicle detects the moving obstacle, it replans the
path and moves to the original lane as we can see from
Figure 11.
We test for robustness by randomly placing vehi-
cles and obstacles in both unstructured and semistruc-
tured environments. As a result, the ego vehicle can
safely avoid the collision with all the obstacles in all
of the simulation scenarios within the required time
for real-time capability of 1 s. This time limit is the
maximal time to be accepted in the real-time capabil-
ity in the guidance of autonomous vehicles and can
be reduced by improving the implementated code or
moving to the more efficient platform such as Robot
Operating System(ROS). Furthermore, the inertia of
the vehicle is omitted which plays an essential role
in the dynamics and will be considered in the future
work.
4 CONCLUSIONS
We investigate the use of the modified Hybrid A* on
the robustness in unstructured and semistructured en-
vironments with a more realistic interaction of the
traffic participants. The approach, combined with
the model-based L-Shape fitting object detection, the
Stanley controller for lateral and PID controller for
longitudinal control, successfully finds the collision-
free path in the simulation with the presence of both
static and dynamic obstacles. The vehicle can ro-
bustly avoid collision within less than 1 s in the guid-
ance of autonomous vehicles.
In future works, we are going to validate quantita-
tively, in both simulations and experiments with ran-
dom configurations, the calculated path and to opti-
mize the weights of the cost function of Hybrid A*
for a better result of the path planned in both un-
structured and semistructured environments. The al-
gorithm will be tested in both Simulink-based model
using xPC Target and be transferred to a C++-based
ROS environment in the test vehicle for a real-time ca-
pability comparison. A more robust object detection
VEHITS 2022 - 8th International Conference on Vehicle Technology and Intelligent Transport Systems
34

algorithm can also be used for a more precise locali-
sation of the obstacles for a more robust path planning
in the real application.
ACKNOWLEDGEMENTS
The first author would like to express attitude to-
wards National Science and Technology Develop-
ment Agency (NSTDA) for the financial support dur-
ing the doctoral study in Germany as well as towards
the second author for the supervision in the doctoral
study.
REFERENCES
Alonso-Mora, J., Breitenmoser, A., Beardsley, P., and Sieg-
wart, R. (2012). Reciprocal collision avoidance for
multiple car-like robots. Proceedings - IEEE Interna-
tional Conference on Robotics and Automation, pages
360–366.
Dolgov, D., Thrun, S., Montemerlo, M., and Diebel, J.
(2008). Practical search techniques in path planning
for autonomous driving. In Proceedings of the First
International Symposium on Search Techniques in Ar-
tificial Intelligence and Robotics (STAIR-08).
Dolgov, D., Thrun, S., Montemerlo, M., and Diebel, J.
(2010). Path planning for autonomous vehicles in
unknown semi-structured environments. The Interna-
tional Journal of Robotics Research, 29(5):485–501.
Emerson, E. (2019). Crowd pathfinding and steering using
flow field tiles. Game AI Pro 360.
Gonz
´
alez, D., P
´
erez, J., Milan
´
es, V., and Nashashibi, F.
(2016). A review of motion planning techniques for
automated vehicles. IEEE Transactions on Intelligent
Transportation Systems, 17(4):1135–1145.
Guirguis, S. E., Gergis, M., Elias, C. M., Shehata, O. M.,
and Abdennadher, S. (2019). Ros-based model pre-
dictive trajectory tracking control architecture using
lidar-based mapping and hybrid a* planning. 2019
IEEE Intelligent Transportation Systems Conference
(ITSC), pages 2750–2756.
Kurzer, K. (2016). Path Planning in Unstructured Envi-
ronments: A Real-time Hybrid A* Implementation for
Fast and Deterministic Path Generation for the KTH
Research Concept Vehicle. PhD thesis.
Nemec, D., Gregor, M., Buben
´
ıkov
´
a, E., Hrubo
ˇ
s, M.,
and Pirn
´
ık, R. (2019). Improving the hybrid a*
method for a non-holonomic wheeled robot. In-
ternational Journal of Advanced Robotic Systems,
16(1):1729881419826857.
Nordeus, E. (2015). Explaining the hybrid a star
pathfinding algorithm for selfdriving cars.
https://blog.habrador.com/2015/11/explaining-
hybrid-star-pathfinding.html.
Paden, B., C
´
ap, M., Yong, S. Z., Yershov, D. S., and Fraz-
zoli, E. (2016). A survey of motion planning and con-
trol techniques for self-driving urban vehicles. CoRR,
abs/1604.07446.
Patle, B., Babu L, G., Pandey, A., Parhi, D., and Jagadeesh,
A. (2019). A review: On path planning strategies
for navigation of mobile robot. Defence Technology,
15(4):582–606.
Petereit, J., Emter, T., Frey, C. W., Kopfstedt, T., and Beutel,
A. (2012). Application of hybrid a* to an autonomous
mobile robot for path planning in unstructured out-
door environments. In ROBOTIK 2012; 7th German
Conference on Robotics, pages 1–6.
Reiter, M., Wehr, M., Sehr, F., Trzuskowsky, A., Taborsky,
R., and Abel, D. (2017). The irt-buggy – vehicle plat-
form for research and education. IFAC-PapersOnLine,
50(1):12588–12595. 20th IFAC World Congress.
Sedighi, S., Nguyen, D.-V., and Kuhnert, K.-D. (2019).
Guided hybrid a-star path planning algorithm for valet
parking applications. In 2019 5th International Con-
ference on Control, Automation and Robotics (IC-
CAR), pages 570–575.
Shewchuk, J. R. (1994). An introduction to the conjugate
gradient method without the agonizing pain. Techni-
cal report, USA.
Thrun, S., Montemerlo, M., Dahlkamp, H., Stavens, D.,
Aron, A., Diebel, J., Fong, P., Gale, J., Halpenny,
M., Hoffmann, G., Lau, K., Oakley, C., Palatucci, M.,
Pratt, V., Stang, P., Strohband, S., Dupont, C., Jen-
drossek, L.-E., Koelen, C., and Mahoney, P. (2006).
Stanley: The robot that won the darpa grand chal-
lenge. J. Field Robotics, 23:661–692.
Udacity (2015). Intro to artificial intelligence.
https://www.udacity.com/course/intro-to-artificial-
intelligence–cs271.
Zhang, X., Xu, W., Dong, C., and Dolan, J. M. (2017). Ef-
ficient l-shape fitting for vehicle detection using laser
scanners. In 2017 IEEE Intelligent Vehicles Sympo-
sium (IV), pages 54–59.
A Robust Modified Hybrid A*-based Closed-loop Local Trajectory Planner for Complex Dynamic Environments
35
