
Model to Hardware: System-level Modeling for Wearable Devices
Daniela Genius and Roselyne Chotin
Sorbonne Université, LIP6, CNRS UMR 7606, Paris, France
Keywords:
Embedded Systems, Analog/Mixed Signal Design, Virtual Prototyping.
Abstract:
Wearable devices which capture and analyze physiological data in a non-invasive and not restraining manner
are increasingly popular, but usually employ specialized hardware. Software is often limited, specific, and
expensive. This paper shows how system-level modeling, virtual prototyping and electronic design can interact
to help designing low-cost wearable bio-medical devices. We propose a design method which allows validation
against actual electronic/mechanical prototypes and present a first case study, a daytime sleepiness detector.
1 INTRODUCTION
Cyber-physical systems (CPS) integrate sensors,
computation and control into physical objects, con-
necting them among each other and to the external
world. The medical domain is a typical application
area of such systems (Dey et al., 2018). The spec-
trum of devices is very large, ranging from patches
for capturing biomedical signals in home hospitaliza-
tion (Silva and Tavakoli, 2020) to hospital beds for
intensive care.
Similar from the technical point of view, but much
less safety critical and subject to lower requirements
for certification, a large number of products are pro-
posed in sports and for leisure activities, where the
collection of bio-physical data is used to monitor per-
formance and well-being of the human body.
Wearable devices capture and analyze physiologi-
cal data in a non-invasive and not restraining manner.
Smart watches and bracelets are increasingly popular,
but there are also shorts and stockings equipped with
vibration sensors, clothing with temperature and rain
sensors, smart glasses etc. Industrial wearables are
almost always based on specialized hardware focused
on a (set of) specific functionalities such as heart rate,
running speed, temperature etc. From an electronics
point of view, they contain ASICs (Application spe-
cific integrated circuits) which are produced at low
cost in large numbers, and cannot be modified, which
raises an obstacle to the exploration of new designs.
In early experimentation, during the process of de-
signing wearable devices for new purposes, designers
wish to check out combinations of several sensors, ex-
plore the best (cheapest, most energy efficient, most
secure) way of communicating between devices and
to the external world (data base, physician, ...) with-
out investing in –often non-reusable– material. Also,
the software is suject to frequent changes and the de-
signer should ideally be able to test it on an as generic
as possible platform, using standard processor cores.
Thus, the idea here is to validate simulations gen-
erated from system-level models against actual ma-
terial implementations. Using an adequate abstrac-
tion level, we propose a system-level "construction
kit" for designing wearable devices, based on combi-
nations of models for sensors, actuators, communica-
tion and control. We extend an existing SysML-based
modeling tool, which already contains analog design
features. From the models, we automatically gener-
ate virtual prototypes for both the digital and analog
part, interface them in order to perform full-system
co-simulation. We finally validate simulation results
against measurements taken from the physical proto-
types, built from electronic and textile parts.
We discuss related work in Section 2, basic con-
cepts are introduced in Section 3. Section 4 describes
the design space: we evaluate abstractions of sensors
wireless networks, and control. Section 5 shows a val-
idation for a wearable bio-monitoring device destined
for non-invasive daytime sleepiness detection.
2 RELATED WORK
In this paper, we bring together experience from
two domains: SysML-based virtual prototyping and
analog/mixed signal hardware design.
2.1 Model-based Design for
Cyber-physical Systems
UML/SysML based modeling techniques such as
MARTE (Demathieu et al., 2008) have been em-
Genius, D. and Chotin, R.
Model to Hardware: System-level Modeling for Wearable Devices.
DOI: 10.5220/0011005400003119
In Proceedings of the 10th International Conference on Model-Driven Engineering and Software Development (MODELSWARD 2022), pages 387-394
ISBN: 978-989-758-550-0; ISSN: 2184-4348
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
387

ployed to model cyber-physical systems (Selic and
Gérard, 2013).
(Fitzgerald et al., 2013) uses model-based formal
methods by integrating discrete-event models of con-
trollers with continuous-time models of their environ-
ments. Starting from an initial discrete-event model,
approximations of continuous-time behavior are sub-
sequently replaced by couplings to continuous-time
models.
Modelica (Fritzson and Engelson, 1998) is an
object-oriented modeling language for component-
oriented systems containing e.g. mechanical, electri-
cal, electronic and hydraulic components. Yet, since
time synchronization is not predefined, the simulation
engine must manipulate objects in a symbolic way in
order to determine an execution order between com-
ponents of different MoCs.
Linking simulations with different Models of
Computation can be done by using e.g. the Functional
Mock-up Interface (Blochwitz et al., 2011), closely
related to the Modelica tools.
TTool (Apvrille, 2011), an open-source modeling
and verification framework offering extensive formal
verification features, has recently been extended with
features which allow analog/mixed signal modeling
and co-simulation (Genius et al., 2019). The exten-
sion is based on timed Synchronous Data Flow (SDF).
Another extension to the SDF formalism, called
Polygraph, which includes frequency constraints and
adjustable communication rates and ensures synchro-
nization, is shown in (Dubrulle et al., 2019).
2.2 Multi-domain Modeling
The following tools target analog/mixed signal or
multi-domain design and co-simulation. Models of
Computation (MoCs) are an important notion, as they
basically differ depending on whether modeling digi-
tal or analog behavior is intended. Thus, the question
of synchronization between two or more parts of a
simulation poses itself.
Ptolemy II (Ptolemy.org, 2014) is based upon the
data-flow model. It addresses digital/analog systems
by defining several sub domains, however leaving
time synchronization to the designer.
Metro II (Davare et al., 2007) is based on hier-
archical high level models. So-called Adapters are
used for data synchronization between components
belonging to different MoC, yet the model designer
has to implement time synchronization; a common
simulation kernel handles the entire execution.
Modelica (Fritzson and Engelson, 1998) is an
object-oriented modeling language for cyber-physical
systems. Time synchronization is not predefined and
the simulation engine must manipulate objects con-
taining sets of equations in a symbolic way in order
to determine an execution order between components
of different MoCs.
Linking simulations with different Models of
Computation can also be done by using the Functional
Mock-up Interface (Blochwitz et al., 2011), which is
closely related to the Modelica tools.
3 BASICS OF SystemC-AMS
MODELING
TTool-AMS (Genius et al., 2018), which we use in
our work, is an extension of TTool which in particu-
lar allows the generation of virtual prototype from a
SysML-like representation. It generates a SystemC
specification for the digital part together with soft-
ware and operating system for full-system simula-
tion, as well as a SystemC-AMS specification from
the analog part of the virtual prototype, and runs both
parts together in a co-simulation.
SystemC (IEEE, 2011) is a collection of C++
classes, while SystemC-AMS (Vachoux et al., 2003)
is an extension based on SystemC (IEEE, 2011), pro-
viding analog and mixed-signal (AMS) features. A
proof-of-concept simulator has been developed (Ein-
wich, 2016).
In SystemC-AMS, digital components are de-
scribed with a Discrete Event (DE) MoC, while ana-
log components are described with the Timed Data
Flow (TDF) MoC, based on the timeless Synchronous
Data Flow semantics (Lee and Messerschmitt, 1987).
A TDF module has input and output ports and
a processing function, which describes the module’s
functionality. TDF clusters are composed of several
TDF modules which are connected by signals. TDF is
the most abstract MoC proposed in SystemC-AMS to
describe analog components, as continuous functions
are sampled at regular intervals.
4 METHOD
Figure 1 shows the design flow and validation. Start-
ing from a functional model of the application, af-
ter partitioning, software (left hand side) and hard-
ware (right hand side) are designed in the SysML-like
representation proposed in (Pedroza et al., 2011) for
software; hardware is also described in a SysML-like
style (Genius and Apvrille, 2016).
A so-called deployment diagram, shown in the
center of the figure, describes the mapping of soft-
MODELSWARD 2022 - 10th International Conference on Model-Driven Engineering and Software Development
388

Virtual Prototype
Co-Simulation
Deployment
Hardware
design
Digital
Hardware
Model
+
Validation
of Results
Hardware
prototype
Analog
Hardware
Model
Software
design
A B Y
R= 1
D= 1
Tm= 6 ms Tm= 4 ms
Tp= 4 ms
R= 3
Tp= 2 ms
D= 0
R= 2
D= 0
Tp= 2 ms
TDF Cluster
HW/SW Partitioning
Figure 1: Integration in the Design Flow.
ware onto the hardware. From this diagram, the tool
generates a platform containing a top cell instantiating
hardware components from the SoCLib library (So-
cLib consortium, 2003), a lightweight operating sys-
tem and software in the form of Posix threads.
The analog part is generated in the form of
SystemC-AMS clusters (Accellera Systems Initiative,
2010) connected to the digital platform by specific in-
terfaces. This reflects the idea that analog parts are
essentially sensors, whose task it is to supply infor-
mation to the digital part, charged with control and
running the software. Both parts are co-simulated, re-
specting causality between MoCs (Porto et al., 2021),
as shown on the lower center of the figure. The lower
right of the figure shows the actual hardware pro-
totype implementation which is used to validate the
simulations on SystemC/SystemC-AMS level.
In order to reach our aim, a toolkit for fast design
of lightweight biomedical devices, required four con-
tributions that extend the existing toolkit.
The first new contribution is an abstraction of sen-
sors: after analyzing common features of usual analog
modules, a library of SysML modules emerges, con-
taining parameterizable models not only of sensors
but also of filters, Digital/Analog and Analog/Digital
converters (DAC and ADC, respectively), and other
typical analog and mixed-signal modules.
The second contribution is the modeling of several
means of wireless communication in TTool-AMS.
The third contribution is the integration of (lim-
ited) software, destined to run on a microcontroller
but tested beforehand on a general purpose proces-
sor platform, to obtain an as-realistic-as-possible full-
system co-simulation.
The final contribution is the validation against the
actual electronic prototype, consisting of microcon-
trollers, eventually microprocessors and FPGA (Field
Programmable Gate Arrays) for the digital part, net-
work components (WIFI, Bluetooth etc.), and sen-
sors.
The advantage of using SystemC-AMS in the vir-
tual prototype is that its interaction with the DE MoC
is well understood (Porto et al., 2021). Another ad-
vantage of using SystemC-AMS is that models can
be successively refined: the processing function of a
TDF module could thus initially only contain the right
number and type of input and output ports, which
are only read on the input side and written on the
output side of the module, then adding a table de-
scribing the output of the sensor for the respective
input, finally using mathematical functions and trans-
formations (Laplace transfer functions are available in
SystemC-AMS).
4.1 Sensor Abstraction
Our first aim is to find an abstract representation for
sensors. Biomedical sensors are destined to capture
signals emitted by the human body. Figure 3 shows a
cluster containing a sensor –here a flex sensor– with
ADC and clock.
All in all we determine the common characteris-
tics of five sensor types. Apart from alimentation,
they have one single output pin, providing analog data
in most cases, digital via an ADC in some. Data out-
put from the TDF cluster is a timed, synchronous flow
of floating point (integer, bit vector) data correspond-
ing to the data types available for TDF ports.
The flex sensor or fleximeter captures the level of
bending by a variable resistor disposed throughout
its length. Accelerometers and gyroscopes are very
common in everyday life (joystick, smartphones, etc.)
Model to Hardware: System-level Modeling for Wearable Devices
389

and, as they name indicates, capture acceleration and
orientation wrt. a referential. An electromyogram
measures the electrical activity of nerves and muscle
contraction. Non-invasive versions, the only ones of
interest in our context, use electrodes glued to the skin
and usually contain signal amplifiers. The pulse sen-
sor, based on an infrared LED and a phototransistor
measures variations of the blood flow. All sensors are
modeled as look up tables in the processing function,
as can be seen in the lowest part of Figure 2.
Figure 2: Abstraction of flex sensor as TDF block: (top) pa-
rameters, (middle) attributes, (bottom) processing function.
4.2 Wireless Network Abstraction
Currently, we provide models of WIFI for mid/short
range (body to server) and bluetooth for very short
range (close to the body) communication. Details are
out of the scope of this paper, there are fourteen TDF
blocks forming a quite detailed, yet still abstracted
model. The Wifi module contains nearly twice as
many (twenty-six) TDF blocks.
Figure 3: Model of a generic sensor.
4.3 Code Generation and Co-simulation
Software is abstracted by a SysML-like representa-
tion of communicating blocks with an underlying se-
mantics of communicating Finite State Machines (Pe-
droza et al., 2011). Blocks can contain additional
entry code to capture behavior that cannot be ex-
pressed in that representation, in particular the treat-
ment of (sampled) floating point values typically ar-
riving from the analog domain. A virtual cycle-bit-
accurate prototype for full-system simulation is gen-
erated automatically (top cell, operating system and
deployed software).
Analog clusters are instantiated together with the
digital components in a common top cell. This top
cell is generated by TTool-AMS, from an extended
Deployment Diagram (Genius et al., 2019).
During co-simulation, the SystemC event-based
simulation kernel controls the AMS simulation. The
difficulty here is synchronization; errors are usually
detected late, often only during simulation, causing
an emergency stop. Recent work proposes a method
to ensure correct synchronization of the DE and TDF
MoCs of SystemC-AMS which is directly applicable
at System Design level (Porto et al., 2021). Synchro-
nization is ensured by detecting causality problems at
converter ports and proposing adequate modification
to the concerned TDF modules. General Purpose I/O
(GPIO) serve interfaces between the analog clusters
and the central interconnect of the digital platform.
4.4 Validation
We validate the resulting traces of the co-simulation
against an actual implementation using electronic and
mechanical parts, which is typically accomplished by
master’s students with off-the-shelf electronics com-
ponents (Celik, 2021; Broux et al., 2019) and hand-
crafted or off-the shelf mechanical/textile compo-
nents. The sensors, whose parameters are identical to
MODELSWARD 2022 - 10th International Conference on Model-Driven Engineering and Software Development
390

Figure 4: Wearable daytime sleepiness detector (prototype).
those used in the model, are connected to one or sev-
eral microcontrollers, which communicate with each
other and with a server running a small data base.
Figure 4 shows a prototype resulting from a recent
study, made of textile parts, in which electronics and
mechanical devices, wireless transmitter/receiver and
power supply can be hidden (Celik, 2021).
5 CASE STUDY: WEARABLE
DAYTIME SLEEPINESS
DETECTOR
Daytime sleepiness, possible cause of traffic accidents
when occurring through driving, is caused by prob-
lems during nighttime sleep (snoring, ...). It is very
current and also concerns a population that, even if
often older and more overweight, is still active in pro-
fessional life.
In the domain of sleep disorder detection, usual
polysomnography devices are most often very expen-
sive and require overnight or several days’ hospital-
ization (Douglas et al., 1992). On the initiative of
the ICAN (cardiometabolics and nutrition) institute,
part of the Pitié-Salpêtrière University Hospital com-
plex, the issue was raised to develop a pre-diagnostic
device, to be worn during at least two or three days,
collected data then analyzed by physicians off-line.
Such a device requires a certain, if limited, bat-
tery autonomy. It should also be easy to use (er-
gonomic user interface, out of the scope of this pa-
per), lightweight and ideally insconspicious (mini-
mization) and, if wireless data transmission is chosen,
satisfy security requirements (out of the scope of the
current paper but supported by TTool).
A wearable daytime sleepiness detection equip-
ment stemming from several master student’s projects
(Broux et al., 2019; Celik, 2021) serves as our case
study. It was decided beforehand that, in order to be
inconspicious, the device consists of two parts hidden
in the clothing: a headgear and a bracelet.
Figure 5: Overview of the client-server architecture.
We wish to evaluate combinations of different sen-
sors. The following sensors have been employed in
our experimentation:
• A flex sensor FS7954 to monitor the bending an-
gle of the neck. It measures 7.4 cm and requires
0.5 Watts and 3.3 V thus 150 mA.
• A gyroscope/accelerometer combination Grove
101020584 which detects sudden movements
(head falling brusquely forward at onset of sleep).
The tension is 3.3V for the aaccelerometer which
consumes 150µ A and the gyroscope consumes 5
mA. This sensor has an integrated ADC.
• An EMG-Sensor SEN0240 (electromyograph) to
monitor muscle tension supplied by 3.3V and
minimum 20mA.
• A pulse sensor KY039HS used to determine the
heart rate. Its received signal varies in function
of the blood flow present in the finger, i.e. the
contraction and decontraction of the heart. Each
amplitude variation between two extreme values
corresponds to a heart beat.
Only the last two are exclusively used in biomedical
sensing. With exception of the last one, all sensors
are located in the upper part of the device, in prox-
imity of the neck. The generic sensor discussed in 4
and shown in Figure 3 can be used as part of this de-
vice, parameterized to represent each of the five sen-
sors. The combination of sensors allows to detect in-
dications for daytime sleepiness: for example whether
a movement of the head is involuntary, for example
when accompanied by a slowdown of the heart rate.
Three ESP-32 micro-controllers implement con-
trol and communication. Each micro-controller is
connected to two sensors (flex sensor and gyro-
scope/accelerometer in the neck area, EMG and pulse
sensor on arm/hand).
Model to Hardware: System-level Modeling for Wearable Devices
391
<<CPU>>
CPU0
Design::Application
<<VGMN>>
Interconnect
<<SystemC-AMS Cluster>>
WIFI_receiver
<<RAM>>
Memory0
<<TTY>>
TTY0
<<SystemC-AMS Cluster>>
sensor
<<SystemC-AMS Cluster>>
bluetooth
<<CPU>>
CPU0
Application
<<VGMN>>
Interconnect
<<SystemC-AMS Cluster>>
WIFI_receiver
<<RAM>>
Memory0
<<TTY>>
TTY0
<<SystemC-AMS Cluster>>
sensor
<<SystemC-AMS Cluster>>
bluetooth
Figure 6: TTool Deployment Diagram for the wearable daytime sleepiness detector.
Bluetooth is used for the communication between
the different parts of the device fixed to the body
(short distance), finally WIFI for communicating with
the server (mid/short distance). We represent WIFI
and Bluetooth, ensuring the communication, modeled
as TDF clusters.
The server and software (among others a simple
database SQLite3) are simulated by a SoCLib mono-
processor platform. Figure 5 gives an overview: each
sensor pair worn by the patient is equipped with blue-
tooth and WIFI and an optinal ADC. Figure 6 shows
the deployment of software (Application task) on the
processor, and the three analog clusters attached.
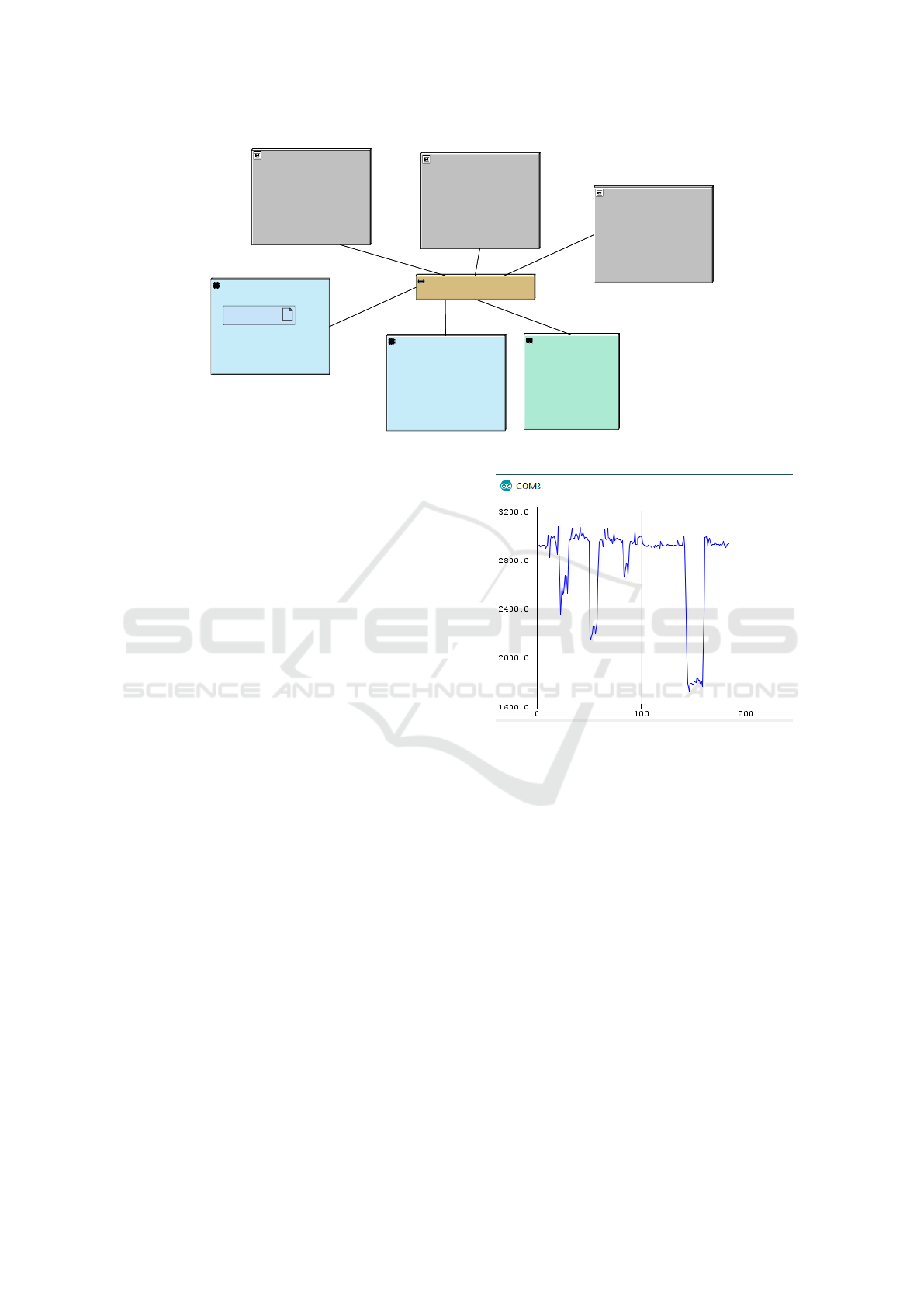
The user interface for co-simulation is currently
very basic, essentially textual output on a terminal.
Traces are stored in a text file, and compared to mea-
surements taken from the electronic prototype by a
Python script. Figure 7 shows some results for one of
the sensors, a flex sensor: output tension in mV (Y
axis) in function of time in seconds (X axis): at 150
seconds, a brusque movement is detected.
Figure 8 is a screenshot of the co-simulation: the
upper part shows the instantiation of the top cell com-
ponents of the SystemC part of the platform (proces-
sor with cache, TTY, memory segments, interconnect,
three GPIO interfaces), the lower part the SystemC-
AMS simulation (three clusters of different complex-
ity and number of modules: WIFI, by far the most
complex with more than 20 TDF modules, an exam-
ple sensor, and bluetooth).
The current prototype of the sleepiness detection
device, already shown earlier in Figure 4, is integrated
in a cap and a bracelet. An alternative version, less
targeted towards mid-age male patients, would inte-
grate the sensors monitoring the neck (flex sensor, gy-
roscope/accelerometer) into a scarf. The most expen-
Figure 7: First results for the flex sensor.
sive, and most heavy, part, are the batteries, which
must maintain alimentation during two or three days:
we require 2 batteries providing 9.600mAh. Two pos-
sibilities are foreseen for data transfer to the server:
either by SIM card or by WIFI, and fed into the
database. The cost of the prototype is less than 100$.
6 FUTURE WORK
The current paper presents work in progress. Co-
simulation results shown here stem from a device in-
cluding a single sensor cluster, while the current elec-
tronic prototype already contains up to three clusters
carrying five sensors. It is possible to refine measure-
ments by adding more sensors. Nevertheless, the sim-
ulated results are close to those obtained with the ac-
tual implementation, which is clearly encouraging.
The students tested the device by wearing it them-
selves during several hours; due to longer-term legal
MODELSWARD 2022 - 10th International Conference on Model-Driven Engineering and Software Development
392
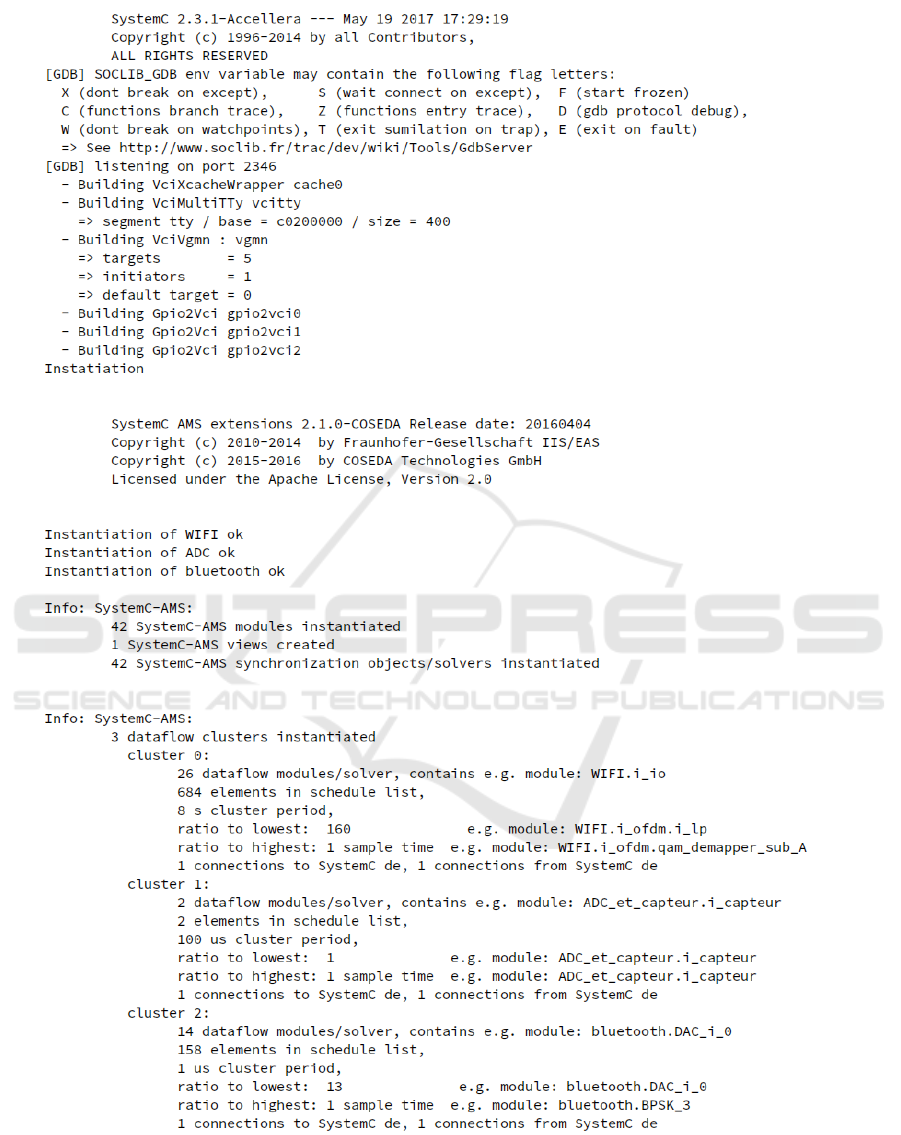
Figure 8: Co-simulation.
Model to Hardware: System-level Modeling for Wearable Devices
393

questions and the sanitary situation, currently larger-
scale tests were not yet possible.
Currently the AMS part is restricted to TDF,
which is a rather coarse abstraction of analog behav-
ior. We plan to refine analog models by integrating
ELN (Electrical Linear Network), another MoC avail-
able in SystemC-AMS.
Most crucial is the optimization of battery usage;
power consumption estimation should be added to the
tool. Finally, even if the method was developed in a
specific domain, it might be generalized to other IoT
devices equipped with multiple sensors.
REFERENCES
Accellera Systems Initiative (2010). SystemC AMS exten-
sions Users Guide, Version 1.0.
Apvrille, L. (2011). TTool, an open-source toolkit for the
modeling and verification of embedded systems.
Blochwitz, T. et al. (2011). The functional mockup interface
for tool independent exchange of simulation models.
In 8th Int. Modelica Conference, Dresden, Germany,
pages 105–114.
Broux, P.-E., Lavalade, P., Sylla, S., and Zhuang, K. (2019).
Somnolence diurne sodi.
Celik, H. O. (2021). Minimization, deployment and evalua-
tion with ai methods of a portable sleepyness detection
device, master’s thesis (French), Sorbonne Université.
Davare, A., Densmore, D., Meyerowitz, T., Pinto, A.,
Sangiovanni-Vincentelli, A., Yang, G., Zeng, H., and
Zhu, Q. (2007). A next-generation design framework
for platform-based design. In DVCon, volume 152.
Demathieu, S., Thomas, F., André, C., Gérard, S., and Ter-
rier, F. (2008). First experiments using the uml profile
for marte. pages 50–57. IEEE.
Dey, N., Ashour, A. S., Shi, F., Fong, S. J., and Tavares,
J. M. R. (2018). Medical cyber-physical systems: A
survey. J. of medical syst., 42(4):74.
Douglas, N. J., Thomas, S., and Jan, M. A. (1992).
Clinical value of polysomnography. The Lancet,
339(8789):347–350.
Dubrulle, P., Gaston, C., Kosmatov, N., Lapitre, A., and
Louise, S. (2019). A data flow model with frequency
arithmetic. In International Conference on Funda-
mental Approaches to Software Engineering, pages
369–385. Springer, Cham.
Einwich, K. (2016). SystemC AMS PoC2.1 Library,
COSEDA, Dresden.
Fitzgerald, J. S., Larsen, P. G., Pierce, K. G., and Verhoef,
M. H. G. (2013). A formal approach to collabora-
tive modelling and co-simulation for embedded sys-
tems. Mathematical Structures in Computer Science,
23(4):726–750.
Fritzson, P. and Engelson, V. (1998). Modelica—a uni-
fied object-oriented language for system modeling
and simulation. In European Conference on Object-
Oriented Programming, pages 67–90. Springer.
Genius, D. and Apvrille, L. (2016). Virtual yet precise pro-
totyping: An automotive case study. In ERTSS’2016,
Toulouse.
Genius, D., Cortés Porto, R., Apvrille, L., and Pêcheux,
F. (2019). A tool for high-level modeling of
analog/mixed signal embedded systems. In MODEL-
SWARD.
Genius, D., Cortés Porto, R., and Apvrille, L. (2018). TTool
AMS.
IEEE (2011). SystemC. IEEE Standard 1666-2011.
Lee, E. A. and Messerschmitt, D. G. (1987). Synchronous
data flow. Proceedings of the IEEE, 75(9):1235–1245.
Pedroza, G., Knorreck, D., and Apvrille, L. (2011).
AVATAR: A SysML environment for the formal veri-
fication of safety and security properties. In 11th IEEE
Conference on Distributed Systems and New Tech-
nologies, Paris, France.
Porto, R. C., Genius, D., and Apvrille, L. (2021). Handling
causality and schedulability when designing and pro-
totyping cyber-physical systems. Software and Sys-
tems Modeling, pages 1–17.
Ptolemy.org, editor (2014). System Design, Modeling, and
Simulation using Ptolemy II.
Selic, B. and Gérard, S. (2013). Modeling and Analysis
of Real-Time and Embedded Systems with UML and
MARTE: Developing Cyber-Physical Systems. Else-
vier.
Silva, A. F. and Tavakoli, M. (2020). Domiciliary hospital-
ization through wearable biomonitoring patches: Re-
cent advances, technical challenges, and the relation
to covid-19. Sensors, 20(23):6835.
SocLib consortium (2003). The SoCLib project: An In-
tegrated System-on-Chip Modelling and Simulation
Platform, www.soclib.fr.
Vachoux, A., Grimm, C., and Einwich, K. (2003). Analog
and mixed signal modelling with SystemC-AMS. In
ISCAS (3), pages 914–917. IEEE.
MODELSWARD 2022 - 10th International Conference on Model-Driven Engineering and Software Development
394
