
Communication Aware Scheduling of Microservices-based Applications
on Kubernetes Clusters
Angelo Marchese
a
and Orazio Tomarchio
b
Dept. of Electrical Electronic and Computer Engineering, University of Catania, Catania, Italy
Keywords:
Container Scheduling, Kubernetes Scheduler, TOSCA, Application Modeling, Network Metrics.
Abstract:
Edge computing paradigm has enabled new application categories with low latency requirements. Container
technologies are increasingly spreading to provide flexible and scalable services also within these dynamic
environments. However, scheduling distributed microservices applications in the Cloud-to-Edge continuum
is a challenging problem, considering the instability and limited network connectivity of Edge infrastructure.
Existing container orchestration systems, like Kubernetes, allow to ease the deployment and scheduling of dis-
tributed applications in Cloud data centers but their scheduling strategy presents some limitations when dealing
with latency critical applications, because it does not consider application communication requirements. In
this work we propose an extension of the default Kubernetes scheduler that takes into account microservices
communication requirements, modeled through the use of the TOSCA language, traffic history and network
latency metrics in order to assign node scores when scheduling each application Pod. A qualitative analysis of
the proposed scheduler is presented with a use case.
1 INTRODUCTION
The scheduling of container-based microservices ap-
plications within node clusters is becoming a chal-
lenging problem, especially in arising Fog and Edge
computing scenarios where specific quality of ser-
vice (QoS) requirements exist (Calcaterra et al., 2020;
Haghi Kashani et al., 2020; Rodriguez and Buyya,
2019). In the above scenarios, several kind of ap-
plications such as process control, augmented real-
ity, smart vehicles and data analysis generate a high
amount of data traffic while at the same time require
stringent response times. In this regard it becomes
necessary to optimize the container scheduling strate-
gies in order to meet this type of requirements (Varsh-
ney and Simmhan, 2019; Salaht et al., 2020; Oleghe,
2021; Calcaterra et al., 2021).
Kubernetes
1
is a widely adopted orchestration
platform that supports the deployment, scheduling
and management of containerized applications. Ku-
bernetes clusters are typically deployed in Cloud data
centers with high-performance nodes interconnected
through high-bandwidth network links. Although var-
a
https://orcid.org/0000-0003-2114-3839
b
https://orcid.org/0000-0003-4653-0480
1
https://kubernetes.io
ious Kubernetes distributions suitable for Cloud-Edge
environments have recently been proposed (Manaouil
and Lebre, 2020), its usage in the context of geo-
distributed and dynamic environments presents some
limitations. One of such limitations relates to its
scheduler (Kayal, 2020). While the base Kubernetes
scheduling strategy aims to improve resource utiliza-
tion and balance load on cluster nodes, it is not opti-
mized to deal with the communication requirements
of microservices applications and does not evaluate
network conditions to take its decisions (Ahmad et al.,
2021). Taking into account also communication as-
pects for decision about application scheduling is es-
sential to improve QoS experimented by end users,
especially in the case of latency-sensitive applications
(Sadri et al., 2021), (Bulej et al., 2021).
In this work we propose an extension of the base
Kubernetes scheduler in the form of a custom scor-
ing plugin that takes into account application commu-
nication requirements, traffic history and network la-
tency metrics to assign node scores when scheduling
each application Pod. The proposed scheduler con-
sider the application topology graph, the communica-
tion patterns and protocols used by its microservices
and the amount of traffic exchanged between them
in order to determine microservices communication
affinity. This information, combined with run-time
190
Marchese, A. and Tomarchio, O.
Communication Aware Scheduling of Microser vices-based Applications on Kubernetes Clusters.
DOI: 10.5220/0011049300003200
In Proceedings of the 12th International Conference on Cloud Computing and Services Science (CLOSER 2022), pages 190-198
ISBN: 978-989-758-570-8; ISSN: 2184-5042
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

node-to-node latencies, is used to optimize the place-
ment of Pods by reducing the network distance be-
tween microservices with high communication affini-
ties. We use the TOSCA standard (OASIS, 2020) to
model the application topology because of its capabil-
ities to represent in a high-level way the architecture
of an application in terms of components and relation-
ships between them. To this purpose we propose a
custom relationship types hierarchy in order to model
typical communication patterns in a microservice ap-
plication.
The rest of the paper is organized as follows. In
Section 2 we provide some background information
about the base Kubernetes scheduler architecture and
the TOSCA standard and some related works are also
presented. Section 3 discusses the motivations and
the design of the proposed scheduler extension, while
section 4 provides some implementation details. Sec-
tion 5 presents a qualitative analysis of the proposed
scheduler extension when dealing with the placement
of the microservices of a sample messaging applica-
tion. Finally, Section 6 concludes the work.
2 BACKGROUND AND RELATED
WORK
2.1 Kubernetes Scheduler
Kubernetes is a production-grade container orches-
tration platform which automates the management
of cloud-native applications on large-scale comput-
ing infrastructures (Burns et al., 2016). Kubernetes
orchestrates the placement and execution of applica-
tion containers within and across node clusters. A Ku-
bernetes cluster consists of a control plane and a set
of worker nodes. The control plane is executed by
different components that run inside a master node.
The worker nodes are responsible for the execution
of containerized application workloads. In particular,
application workloads consist of Pods, which in turn
contain one or more containers. A Pod represents the
minimal deployment unit in Kubernetes.
Among control plane components, the kube-
scheduler
2
is in charge of selecting an optimal clus-
ter node for each Pod to run them on, taking into
account Pod requirements and node resources avail-
ability. Each Pod scheduling attempt is split into two
phases: the scheduling cycle and the binding cycle,
which in turn are divided into different sub-phases.
During the scheduling cycle a suitable node for the
2
https://kubernetes.io/docs/concepts/scheduling-evict
ion/kube-scheduler
Pod to schedule is selected, while during the binding
cycle the scheduling decision is applied to the cluster
by reserving the necessary resources and deploying
the Pod to the selected node. Each sub-phase of both
cycles is implemented by one or more plugins, which
in turn can implement one or more sub-phases. The
Kubernetes scheduler is meant to be extensible. In
particular, each scheduling phase represents an exten-
sion point which one or more custom plugins can be
registered at. We take advantage of this extensibility
property to propose our custom scoring plugin.
2.2 TOSCA Standard
TOSCA is a standard designed by OASIS that defines
a metamodel for specifying both the structure of a
Cloud application as well as its life cycle management
aspects (OASIS, 2020). The TOSCA language intro-
duces a YAML-based grammar that allows to describe
the structure of a Cloud application as a service tem-
plate, which is composed of a topology template and
a set of types needed to build such a template. The
topology template defines the topology model of a
service as a typed directed graph, whose nodes, called
node templates, model the application components,
and edges, called relationship templates, model the
relations occurring among such components. Each
node template is associated with a node type that de-
fines the properties of the corresponding component.
In our work, the use of the TOSCA standard aims to
model the topology of a microservice-based applica-
tion, in particular the relationships between microser-
vices in terms of their communication interactions.
2.3 Related Work
In the literature, there is a variety of works that
propose extensions of the default Kubernetes Pod
scheduling strategy in order to deal with the com-
munication requirements of modern latency-sensitive
and data-intensive applications, especially those exe-
cuted in Cloud-Edge environments.
In (Rossi et al., 2020) an orchestration tool is
presented that extends Kubernetes with adaptive au-
toscaling and network-aware placement capabilities.
The authors propose a two-step control loop, in which
a reinforcement learning approach dynamically scales
container replicas on the basis of the application re-
sponse time, and a network-aware scheduling policy
allocates containers on geo-distributed computing en-
vironments. The scheduling strategy uses a greedy
heuristic that takes into account node-to-node laten-
cies to optimize the placement of latency-sensitive ap-
plications. The problem with the proposed solution is
Communication Aware Scheduling of Microservices-based Applications on Kubernetes Clusters
191

that it optimizes the placement of each microservice
without considering interactions with other microser-
vices.
In (Wojciechowski et al., 2021) a Kubernetes
scheduler extender is proposed that uses applica-
tion traffic historical information collected by Ser-
vice Mesh to ensure an efficient placement of Ser-
vice Function Chains (SFCs). During each Pod
scheduling, nodes are scored by adding together traf-
fic amounts, averaged over a time period, between the
Pod’s microservice and its neighboors in the chain of
services executed on those nodes. As in our work,
historical application traffic is measured, but the pro-
posed scheduler does not take into account current
node-to-node latencies, neither communication pat-
terns between microservices.
In (Caminero and Mu
˜
noz-Mansilla, 2021) an ex-
tension to the Kubernetes default scheduler is pro-
posed that uses information about the status of the net-
work, like bandwidth and round trip time, to optimize
batch job scheduling decisions. The scheduler pre-
dicts whether an application can be executed within
its deadline and rejects applications if their deadlines
cannot be met. Although information about current
network conditions and historical job execution times
is used during scheduling decisions, communication
interactions between microservices are not considered
in this work.
In (Toka, 2021) a Kubernetes edge-scheduler is
presented that takes into account the node-to-node
network latencies, and the applications’ latency re-
quirements in the scheduling decisions about the ap-
plication components. The scheduler is based on an
heuristic algorithm, which optimizes the placement
of latency sensitive applications in a geographically
distributed infrastructure. A re-scheduler is respon-
sible for container migration in order to improve re-
source utilization in the infrastructure. In this work,
however, microservice-to-microservice communica-
tion patterns and exchanged traffic amount are not
taken into account during scheduling decisions.
In (Nastic et al., 2021) a scheduling framework is
proposed which enables edge sensitive and Service-
Level Objectives (SLO) aware scheduling in the
Cloud-Edge-IoT Continuum. The proposed sched-
uler extends the base Kubernetes scheduler and makes
scheduling decisions based on a service graph, which
models application components and their interactions,
and a cluster topology graph, which maintains cur-
rent cluster and infrastructure-specific states. How-
ever, this work also does not consider historical infor-
mation about traffic amount exchanged between mi-
croservices in order to determine their run time com-
munication affinity.
Like the aforementioned research works, in our
work we propose an extension of the default Kuber-
netes scheduler that makes its scheduling decisions
based on the type of communication between mi-
croservices, the historical traffic amount exchanged
between them and the current network state of the
cluster. A distinctive contribution of our work, is
the application-awareness of the proposed schedul-
ing strategy, aimed to take into account the topology
graph of a microservices-based application.
3 SCHEDULER DESIGN
3.1 Motivation
Although Kubernetes is the de-facto container orches-
tration platform for Cloud environments, its default
scheduling strategy presents some limitations when
dealing with node clusters dislocated in the Cloud-
to-Edge continuum (Kayal, 2020). Edge environ-
ments consists of geographically distributed nodes
with high heterogeneity in terms of computational re-
sources and network connectivity. Edge infrastructure
is more dynamic and unstable than that of Cloud data
centers and is characterized by more frequent node
failures and network partitions (Khan et al., 2019).
Furthermore, recent applications such as Internet of
Things (IoT), data analytics, augmented reality and
video streaming services demand stronger require-
ments in terms of response latency and network band-
width than traditional web applications (Gedeon et al.,
2019). All of this poses serious challenges in ensur-
ing these new Quality of Service (QoS) requirements
are met (Haghi Kashani et al., 2020), a task that the
default Kubernetes scheduler isn’t able to handle well
for several reasons.
One problem relates to the variety of metrics and
node resource types that are considered during each
scheduling decision. The scheduler mainly consid-
ers CPU and memory limits and requests that are
specified in the Pod resource description. How-
ever it doesn’t consider Pods network bandwidth re-
quirements and its availability on cluster nodes and
node-to-node latency, which are critical parameters to
schedule communication-intensive and latency sen-
sitive applications. Kubernetes allows to define ex-
tended resources for which it is possible to specify re-
quests and limits in the Pod description, but, as for
CPU and memory resources, the scheduler doesn’t
consider their actual utilization in each cluster node
when making its scheduling decisions. To evaluate
the utilization level of a node resource, the scheduler
considers the sum of the values required for that re-
CLOSER 2022 - 12th International Conference on Cloud Computing and Services Science
192

source by each Pod running on that node. This means
that the estimated resource utilization may not match
with its run-time value. Considering the run-time
cluster state and network conditions during schedul-
ing decisions is critical in dynamic environments like
Edge clusters. In addition, the Kubernetes scheduler
only evaluates the current view of the system, not tak-
ing into account the historical information related to
resource utilization, node and network failures and
application performances. Another limitation, prob-
ably the most important, relates to the application-
awareness level of the scheduling decisions. Ku-
bernetes allows to specify resource requirements,
Pod-to-node and Pod-to-Pod affinity and anti-affinity
rules for Pod scheduling. However the Kubernetes
scheduler isn’t able to make its placement decisions
based on the application topology and microservice-
to-microservice communication patterns and traffic
history.
In this work we just propose an extension for the
Kubernetes scheduler with the aim to overcome some
of the aforementioned limitations, in particular those
related to network communication between microser-
vices.
3.2 Overall Architecture
The proposed Kubernetes scheduler extension is de-
signed to ensure that network communication aspects
are also taken into account during each Pod schedul-
ing decision. In particular, the aim is to ensure that
each scheduling decision is also made according to
the topology of the application to be deployed, the
communication patterns between microservices, the
history related to the amount of traffic exchanged
between them and the run-time network state, in
terms of the communication latencies between clus-
ter nodes. Run-time network conditions and applica-
tion communication requirements are essential infor-
mation to optimize container placement decisions in
order to reduce end-to-end latencies experimented by
end users (Aral et al., 2019).
The basic idea of the proposed scheduler is that,
when scheduling a microservice Pod, the type and
the amount of traffic exchanged with other microser-
vices and the current node-to-node latencies are taken
into account. In a microservices-based application
a generic user request consists of a chain of sub-
requests and its end-to-end latency is determined by
the sum of the latencies of each service call in the
chain. This means that in order to obtain lower end-
to-end latencies it is not sufficient to minimize the
network latency between end users and the front-end
components of an application, but it is necessary to
consider the whole application topology graph and try
to schedule each microservice on the basis of the other
microservices placement.
The proposed scheduler extension operates with
the aim to minimize the network distance between the
microservices that communicate through critical com-
munication channels. Critical communication chan-
nels are those channels that use synchronous and
blocking communication protocols or those through
which a high amount of traffic is exchanged. In gen-
eral, critical communication channels are those that
represent bottlenecks in a chain of requests. Schedul-
ing microservices that communicate through critical
channels on the same node or in nodes with a limited
end-to-end network latency allows to reduce applica-
tion response times.
The extension is realized in the form of a custom
scoring plugin. This plugin extends the base Kuber-
netes scheduler scoring phase and, for each Pod to
schedule, it assigns a score to each candidate node
that passes the filtering phase. The node scoring algo-
rithm of the custom plugin takes as inputs two param-
eters: the node-to-node communication latency val-
ues and the microservice-to-microservice communi-
cation affinity values. The former are determined by
real time network measurements performed by net-
work probes and collected by a metrics server. The
latter are associated to each communication channel
between two microservices and are a combination
of a static and a dynamic contribution. The static
contribution depends on the communication pattern
and protocol of the corresponding channel. The
more synchronous the communication channel pro-
tocol, the higher this value. The dynamic contribu-
tion is directly proportional to the average value of
the amount of traffic exchanged through the commu-
nication channel up to that time. Microservices that
communicate through critical channels are those with
the higher communication affinity values. Further de-
tails of the application topology modeling and node
scoring algorithm are provided in the following sub-
sections.
3.3 Application Topology Modeling
One fundamental aspect of the proposed scheduler ex-
tension is that it also makes its decisions on the basis
of the application topology graph. This graph con-
tains the microservices that make up an application as
nodes and the communication channels used to com-
municate between them as links.
Unlike the base Kubernetes scheduler implemen-
tation that mainly considers low level resource re-
quirements, the proposed extension allows to spec-
Communication Aware Scheduling of Microservices-based Applications on Kubernetes Clusters
193
PriorityRoute
- priority = 0.0
SynchronousRoute
- priority = 25.0
AsynchronousRoute
- priority = 1.0
HTTPRoute
- priority = 100.0
gRPCRoute
- priority = 50.0
AMQPRoute
- priority = 5.0
HTTPServerPushRoute
- priority = 10.0
Figure 1: Relationship types hierarchy.
ify higher level requirements that relate with the
application composition and its microservice-to-
microservice communication patterns. The idea be-
hind our reasoning is that a scheduling strategy based
on application architecture and topology informa-
tion can improve the quality and effectiveness of mi-
croservice deployments and allows to realize schedul-
ing strategies customized for the specific application
needs. High-level requirements can also relate to
the resiliency, availability and reliability of an ap-
plication. However, in this work we mainly con-
sider those related with the communication aspects,
because they are the most critical when dealing with
communication-intensive and latency sensitive appli-
cations.
A fundamental requirement in the application
modeling task is to give the application architect a
tool that allows him to model the application topol-
ogy in a high level and qualitative manner, following
an intent modelling approach (Tamburri et al., 2019).
This way the application modeler does not have to
deal with quantitative parameters and low level de-
tails, but he only needs to know the microservices that
make up an application and the protocols they use to
communicate between them. For this purpose we pro-
pose the use of the TOSCA standard for modeling the
application topology graph. The application topology
graph is modeled as a TOSCA service template where
node templates represent microservices and the rela-
tionship templates the communication channels be-
tween them.
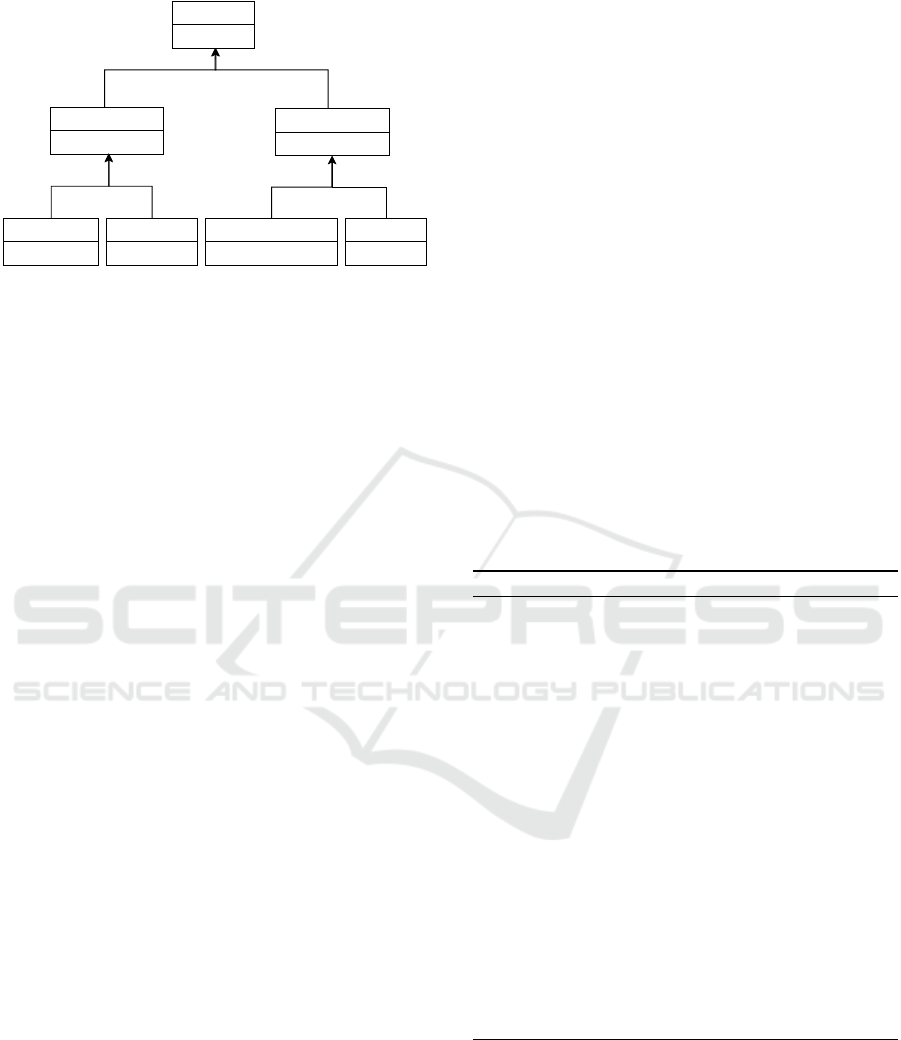
To model the various types of communication
channels that characterize typical microservice appli-
cations, a custom hierarchy of relationship types is
defined, shown in Figure 1. The relationship type
PriorityRoute is the base type for which the property
priority is defined. This property represents the pri-
ority level associated with the corresponding commu-
nication channel and for each type in the hierarchy
a default value is assigned. The higher this value,
more critical the communication channel is. The re-
lationship types hierarchy is defined in such a way
that a higher priority value is associated with the syn-
chronous and heavyweight communication protocols.
As an example, relationship types derived from Syn-
chronousRoute have a higher priority than those de-
rived from AsynchronousRoute. The proposed rela-
tionship types hierarchy is only a sample hierarchy
that models typical communication patterns in a mi-
croservices application. It can be extended with new
custom types and the default priority values can be
overridden in each relationship template inside a ser-
vice template.
3.4 Scoring Algorithm
The proposed scheduler extension is realized in the
form of a custom scoring plugin. For each Pod to be
scheduled, the plugin assigns a score to each candi-
date node of the cluster that has passed the filtering
phase. The scores calculated by the custom plugin
are then added to the scores of the other scoring plu-
gins. Algorithm 1 shows the details of the scoring
algorithm of the proposed plugin.
Algorithm 1: Node scoring algorithm.
Input: pod, node, channels, latencies, clusterNodes
Output: score
1: score ← 0
2: for cn in clusterNodes do
3: pScore ← 0
4: for p in cn.pods do
5: if areNeighbors(pod, p) then
6: sc ← α × channels[pod, p].priority
7: dc ← β × channels[pod, p].tra f f ic
8: pScore ← pScore + sc + dc
9: end if
10: end for
11: if cn == node then
12: score ← score + γ × pScore
13: else
14: δ ← 1/latencies[node,cn]
15: score ← score + δ × pScore
16: end if
17: end for
The algorithm takes as inputs the Pod to be sched-
uled, the node to be scored, the list of channels in
the application graph and the set of nodes in the clus-
ter. The final node score is the weighted sum of
partial scores calculated for each cluster node. The
weight associated with each partial score depends on
whether the corresponding cluster node is the node
to be scored or not. If it is, the weight is the pa-
CLOSER 2022 - 12th International Conference on Cloud Computing and Services Science
194

Prometheus Server Dgraph Database
Custom Kubernetes
Scheduler
control plane traffic
Envoy
Proxy
Worker
Node
Network
Probe
Envoy
Proxy
Worker
Node
Network
Probe
Envoy
Proxy
Worker
Node
Network
Probe
M1
M3
M2
M4
TOSCA Service Template
Puccini Compiler
JSON Graph Representation
inter-node latency metrics
inter-microservice traffic metrics
ICMP
Traffic
Istio Control Plane
Kubernetes Cluster
Figure 2: Scheduler extension deployment architecture.
rameter γ. If it is not, the weight is represented by
the inverse of the network latency, averaged over a
configurable time period, between the corresponding
cluster node and the node to be scored. Each par-
tial score is calculated by adding together the commu-
nication affinities between the Pods deployed on the
corresponding cluster node and the Pod to be sched-
uled. The communication affinity between two Pods
is represented by the sum of a static contribution and
a dynamic contribution. The static contribution is the
product between a parameter α and the priority value
associated with the communication channel between
the microservices of the two Pods. The dynamic con-
tribution is the product between a parameter β and the
amount of traffic, averaged over a configurable time
period, exchanged between the microservices of the
two Pods.
The scoring algorithm assigns a score to each node
so that the Pod to be scheduled is deployed on the
node, or in a nearby node in terms of network latency,
on which the microservices with which the Pod has
the greatest communication affinity are executed. By
tuning parameters α and β, it is possible to modify the
contribution on the final node score due to the com-
munication channels priority level and the run-time
traffic exchanged between microservices respectively.
By giving a higher value to the parameter α, schedul-
ing decisions are mainly influenced by the commu-
nication protocols rather than by the amount of traffic
exchanged between microservices. On the other hand,
by increasing the value of the β parameter, the traffic
history takes on greater importance than the type of
communication. Similarly, increasing the value of the
parameter γ increases the probability that a Pod will
be scheduled in the same node where the microser-
vices with which the Pod has the greatest communi-
cation affinity are deployed.
4 PROTOTYPE
IMPLEMENTATION
Figure 2 shows the deployment architecture of the
proposed scheduler extension and the components
with which it interacts to make its scheduling deci-
sions. The scheduler extension is executed as a sec-
ondary scheduler that is deployed together with the
default one. This custom scheduler extends the base
Kubernetes scheduler by implementing a scoring plu-
gin written in the Go language. To establish node
scores, the plugin uses run-time cluster and appli-
cation metrics and application topology graph infor-
mation. Run-time metrics are periodically queried
Communication Aware Scheduling of Microservices-based Applications on Kubernetes Clusters
195
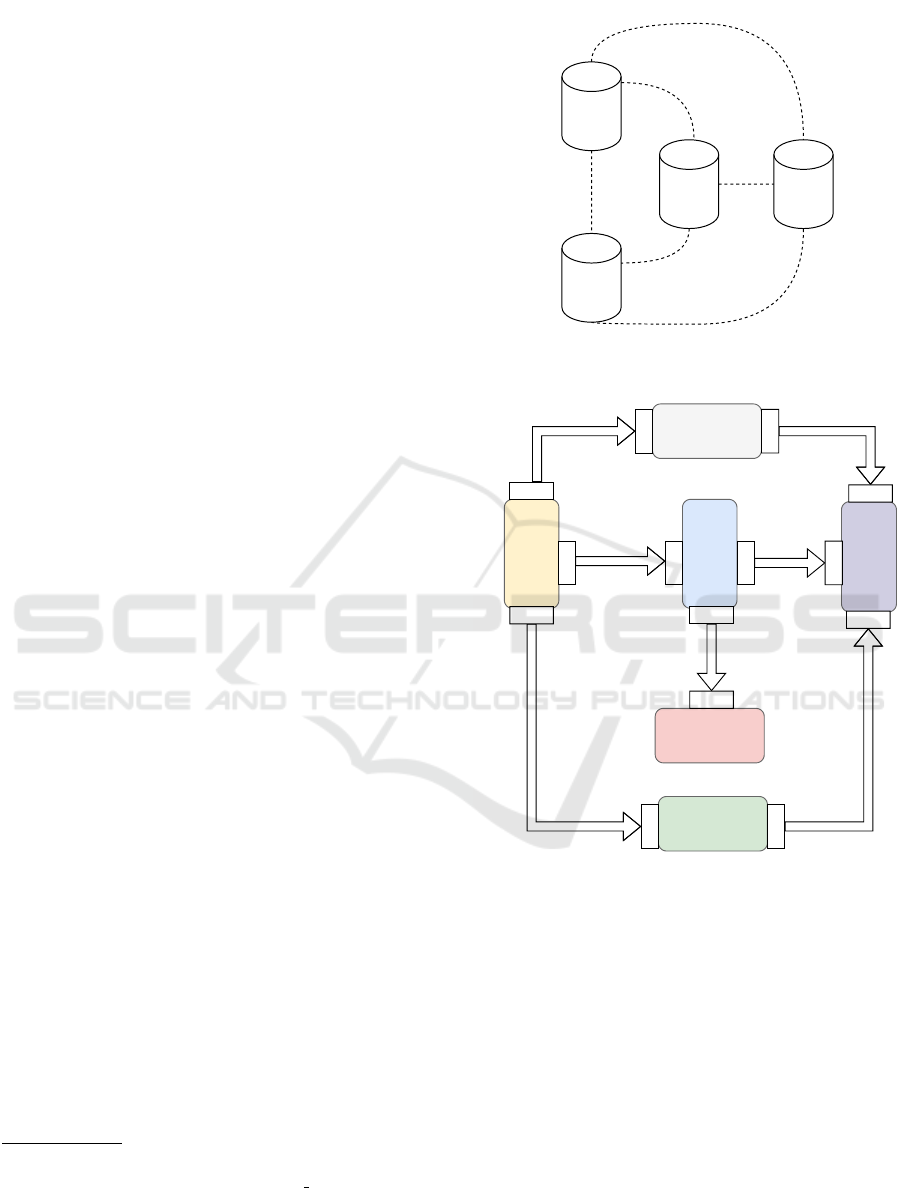
from a Prometheus
3
server by using the Prometheus
Go client library
4
. Topology graph information are
queried for each Pod to schedule from a Dgraph
5
database by using the Dgraph Go client library
6
. The
topology graph of an application is stored in the
Dgraph database starting from a JSON representation
of the graph. This representation is obtained by com-
piling the TOSCA service template of the application
with the Puccini compiler
7
.
The Puccini tool also defines a TOSCA profile for
Kubernetes that we extend to define the custom rela-
tionship types hierarchy described in Section 3.3. In
particular, this profile defines the Service node type
that we use to model a generic microservice. This
node type exposes the capabilities metadata, service
and deployment, whose types are Metadata, Service
and Deployment respectively. Furthermore, a route
requirement is defined, whose instances can be asso-
ciated with Service capabilities of other Service node
templates. The association between route require-
ment instances and Service capabilities can be done
through Route relationship templates. The Route rela-
tionship type is the base type extended by our custom
relationship types hierarchy.
Inter-node latency metrics are collected by net-
work probes deployed in each node of the cluster as
Pods of a DaemonSet. Each network probe pings pe-
riodically all the nodes in the cluster and export the la-
tency metrics to the Prometheus server. Microservice-
to-microservice traffic metrics are collected and ex-
ported to the Prometheus server by Envoy proxies ex-
ecuted in each application Pod. Envoy proxies are
automatically injected as sidecar containers in each
Pod by the Istio framework whose control plane is de-
ployed in the cluster.
5 USE CASE
This section illustrates an example of how the pro-
posed Kubernetes scheduler extension operates when
dealing with the placement of the Pods of a typ-
ical microservices-based application whose compo-
nents communicate with each other through both syn-
chronous and asynchronous channels.
The use case shows in a qualitative way how, un-
like the default Kubernetes scheduler, the proposed
scheduler extension takes into account cluster net-
work conditions and microservices communication
3
https://prometheus.io
4
https://github.com/prometheus/client golang
5
https://dgraph.io
6
https://github.com/dgraph-io/dgo
7
https://puccini.cloud/
node0
node1
node2 node3
20 ms
20 ms
40 ms
100 ms
120 ms
120 ms
Figure 3: Sample Kubernetes cluster.
message-notifier
message-reader
rabbitmq
api-gateway
mongodb
message-
publisher
HTTPServerPushRoute
HTTPRoute
HTTPRoute
AMQPRoute
AMQPRoute
AMQPRoute
SynchronousRoute
route
service
route
service
route
service
route
service
service
route
route
service
service
route
Figure 4: Sample application TOSCA service template.
affinities in order to optimize the placement of ap-
plication Pods. Considering network state and appli-
cation communication requirements is critical in the
context of Cloud-to-Edge cluster deployments where
node-to-node latencies are not negligible.
In this scenario we consider a geographically dis-
tributed Kubernetes cluster of four nodes shown in
Figure 3. We assume for simplicity that mean node-
to-node latencies (shown in the figure) do not change
over time. Figure 4 shows the TOSCA service tem-
plate of a sample messaging application whose com-
ponents are configured to be scheduled by a sec-
ondary scheduler that implements the proposed cus-
tom plugin. This application consists of different mi-
croservices, modeled as node templates, that commu-
CLOSER 2022 - 12th International Conference on Cloud Computing and Services Science
196

nicate with each other through various types of com-
munication channels, modeled as relationship tem-
plates. Each node template is an instance of the Ser-
vice node type, defined in the Puccini TOSCA pro-
file, and each relationship template, that associates
a route requirement with a service capability, is an
instance of one of the relationship types presented
in Section 3.3. The message-publisher service re-
ceives text messages from users through HTTP re-
quests and publishes them to the rabbitmq broker.
The message-reader service receives messages from
the broker and stores them in the mongodb database.
These messages are then returned to users when the
message-reader service receives HTTP requests. The
message-notifier service receives messages from the
broker and publishes them in the body of Server Sent
Events (SSE) sent through the HTTP/2 Server Push
protocol. The message-publisher, message-reader
and message-notifier services are exposed to external
users through the api-gateway service.
For the custom plugin to function correctly it is
necessary to deploy first the metrics server, in this
case a Prometheus server, the network probes in each
node as a DaemonSet and the graph database, in this
case a Dgraph database. Then the graph represen-
tation of the sample application needs to be stored
on the Dgraph database. This representation is ob-
tained by compiling the TOSCA service template of
the sample application using the Puccini compiler and
its TOSCA profile for Kubernetes extended with our
relationship types hierarchy.
For the presented sample scenario we assume that
cluster nodes have 4GB of RAM and all microser-
vices Pods requires 1.5GB of RAM, except for the
rabbitmq service that requests 3GB of RAM. This
way a maximum of two application Pods can be de-
ployed on the same cluster node and the rabbitmq
service Pods can be deployed on nodes where no
other Pods are executed. Assuming that the sam-
ple application has not been executed yet and the
scheduling queue contains Pods for the services rab-
bitmq, mongodb, message-notifier, message-reader,
message-publisher and api-gateway in the specified
order, the proposed scheduler plugin assigns node
scores in the following way.
For the rabbitmq Pod the plugin assigns the min-
imum score to all nodes because no other dependent
Pod is deployed on the cluster. Suppose the rabbitmq
Pod is scheduled on node3, so no other Pods can be
scheduled on that node for the assumptions we made
earlier. In the same way, for the mongodb Pod the
same score is assigned to all nodes, so we suppose it
is scheduled on node2. For the message-notifier Pod,
the maximum score is assigned to node2 because this
node0
node2node3
message-
notifier
mongodbrabbitmq
message-
publisher
node1
api-
gateway
message-
reader
Figure 5: Sample application microservices placement.
is the closest node to node3 where the rabbitmq ser-
vice is deployed. This way the remaining Pods can
be scheduled only on nodes node0 and node1. When
scheduling the message-reader Pod, the custom plu-
gin assigns the same scores to node0 and node1, be-
cause they have the same network distance to node2
and node3, where mongodb and rabbitmq Pods are
deployed respectively. Suppose the message-reader
is scheduled on node1. In the same way, for the
message-publisher Pod the same score is assigned to
both nodes, and for node load balancing reasons this
Pod is deployed on node0. Finally, for the same rea-
sons the api-gateway Pod can be indifferently sched-
uled on node0 and node1, and we suppose that it is
deployed on the latter. 5 shows the resulting place-
ment of the sample application microservices.
At run-time, traffic amount exchanged between
microservices is collected by the metrics server, in
such a way that the custom plugin can use this in-
formation for future node scoring phases. Assuming
that the message-publisher service receives a higher
HTTP request load than that of message-reader ser-
vice, the communication affinity between the api-
gateway service and the message-publisher service
becomes higher than the affinity between the api-
gateway service and the message-reader service. If
a new Pod for the api-gateway service is created (be-
cause for example of a failure of the actual Pod, a
rolling update or an horizontal scaling), the custom
plugin assigns a higher score to node0 during the scor-
ing phase of its scheduling cycle. This way, if the
api-gateway Pod is placed on node0, mean response
time experimented by external users when publishing
messages is reduced.
Communication Aware Scheduling of Microservices-based Applications on Kubernetes Clusters
197

6 CONCLUSIONS
In this work we proposed an extension of the default
Kubernetes scheduler realized in the form of a custom
scoring plugin. The proposed plugin takes into ac-
count application communication requirements, traf-
fic history and network latency metrics to assign
node scores when scheduling each application Pod.
Application communication requirements are speci-
fied through a TOSCA service template that repre-
sents application components as node templates and
microservice-to-microservice communication chan-
nels as relationship templates. Application traffic his-
tory and current node-to-node latency measures are
instead queried from a Prometheus server. As a fu-
ture work we plan to add the possibility to model more
quantitative communication requirements, like dead-
lines on communication channels, inside TOSCA ser-
vice templates and to design custom Kubernetes con-
trollers that monitor application components and re-
deploy them if those requirements are not met.
REFERENCES
Ahmad, I., AlFailakawi, M. G., AlMutawa, A., and Al-
salman, L. (2021). Container scheduling techniques:
A survey and assessment. Journal of King Saud Uni-
versity - Computer and Information Sciences.
Aral, A., Brandic, I., Uriarte, R. B., De Nicola, R., and
Scoca, V. (2019). Addressing application latency re-
quirements through edge scheduling. Journal of Grid
Computing, 17(4):677–698.
Bulej, L., Bure
ˇ
s, T., Filandr, A., Hn
ˇ
etynka, P., Hn
ˇ
etynkov
´
a,
I., Pacovsk
´
y, J., Sandor, G., and Gerostathopoulos, I.
(2021). Managing latency in edge–cloud environment.
Journal of Systems and Software, 172:110872.
Burns, B., Grant, B., Oppenheimer, D., Brewer, E., and
Wilkes, J. (2016). Borg, omega, and kubernetes. ACM
Queue, 14:70–93.
Calcaterra, D., Di Modica, G., Mazzaglia, P., and Tomar-
chio, O. (2021). TORCH: a TOSCA-Based Orchestra-
tor of Multi-Cloud Containerised Applications. Jour-
nal of Grid Computing, 19(5).
Calcaterra, D., Di Modica, G., and Tomarchio, O. (2020).
Cloud resource orchestration in the multi-cloud land-
scape: a systematic review of existing frameworks.
Journal of Cloud Computing, 9(49).
Caminero, A. C. and Mu
˜
noz-Mansilla, R. (2021). Quality of
service provision in fog computing: Network-aware
scheduling of containers. Sensors, 21(12).
Gedeon, J., Brandherm, F., Egert, R., Grube, T., and
M
¨
uhlh
¨
auser, M. (2019). What the fog? edge comput-
ing revisited: Promises, applications and future chal-
lenges. IEEE Access, 7:152847–152878.
Haghi Kashani, M., Rahmani, A. M., and Jafari Nav-
imipour, N. (2020). Quality of service-aware ap-
proaches in fog computing. International Journal of
Communication Systems, 33(8).
Kayal, P. (2020). Kubernetes in fog computing: Feasibil-
ity demonstration, limitations and improvement scope
: Invited paper. In 2020 IEEE 6th World Forum on
Internet of Things (WF-IoT), pages 1–6.
Khan, W. Z., Ahmed, E., Hakak, S., Yaqoob, I., and Ahmed,
A. (2019). Edge computing: A survey. Future Gener-
ation Computer Systems, 97:219–235.
Manaouil, K. and Lebre, A. (2020). Kubernetes and the
Edge? Research Report RR-9370, Inria Rennes - Bre-
tagne Atlantique.
Nastic, S., Pusztai, T., Morichetta, A., Pujol, V. C., Dustdar,
S., Vii, D., and Xiong, Y. (2021). Polaris scheduler:
Edge sensitive and slo aware workload scheduling in
cloud-edge-iot clusters. In 2021 IEEE 14th Inter-
national Conference on Cloud Computing (CLOUD),
pages 206–216.
OASIS (2020). Topology and Orchestration Specification
for Cloud Applications Version 2.0. http://docs.oasis-
open.org/tosca/TOSCA/v2.0/TOSCA-v2.0.html.
Oleghe, O. (2021). Container placement and migration
in edge computing: Concept and scheduling models.
IEEE Access, 9:68028–68043.
Rodriguez, M. A. and Buyya, R. (2019). Container-based
cluster orchestration systems: A taxonomy and fu-
ture directions. Software: Practice and Experience,
49(5):698–719.
Rossi, F., Cardellini, V., Lo Presti, F., and Nardelli, M.
(2020). Geo-distributed efficient deployment of con-
tainers with kubernetes. Computer Communications,
159:161–174.
Sadri, A. A., Rahmani, A. M., Saberikamarposhti, M., and
Hosseinzadeh, M. (2021). Fog data management: A
vision, challenges, and future directions. Journal of
Network and Computer Applications, 174:102882.
Salaht, F. A., Desprez, F., and Lebre, A. (2020). An
overview of service placement problem in fog and
edge computing. ACM Comput. Surv., 53(3).
Tamburri, D. A., Van den Heuvel, W.-J., Lauwers,
C., Lipton, P., Palma, D., and Rutkowski, M.
(2019). Tosca-based intent modelling: goal-modelling
for infrastructure-as-code. SICS Software-Intensive
Cyber-Physical Systems, 34(2):163–172.
Toka, L. (2021). Ultra-reliable and low-latency computing
in the edge with kubernetes. Journal of Grid Comput-
ing, 19(3):31.
Varshney, P. and Simmhan, Y. (2019). Characterizing appli-
cation scheduling on edge, fog and cloud computing
resources. CoRR, abs/1904.10125.
Wojciechowski, L., Opasiak, K., Latusek, J., Wereski, M.,
Morales, V., Kim, T., and Hong, M. (2021). Netmarks:
Network metrics-aware kubernetes scheduler powered
by service mesh. In IEEE INFOCOM 2021 - IEEE
Conference on Computer Communications, pages 1–
9.
CLOSER 2022 - 12th International Conference on Cloud Computing and Services Science
198
