
Simulation-to-Reality Domain Adaptation for Offline 3D Object
Annotation on Pointclouds with Correlation Alignment
Weishuang Zhang, B. Ravi Kiran, Thomas Gauthier, Yanis Mazouz and Theo Steger
Navya, France
Keywords:
Pointclouds, Object Detection, 3D, Simulation, Unsupervised Domain Adaptation.
Abstract:
Annotating objects with 3D bounding boxes in LiDAR pointclouds is a costly human driven process in an
autonomous driving perception system. In this paper, we present a method to semi-automatically annotate
real-world pointclouds collected by deployment vehicles using simulated data. We train a 3D object detector
model on labeled simulated data from CARLA jointly with real world pointclouds from our target vehicle. The
supervised object detection loss is augmented with a CORAL loss term to reduce the distance between labeled
simulated and unlabeled real pointcloud feature representations. The goal here is to learn representations that
are invariant to simulated (labeled) and real-world (unlabeled) target domains. We also provide an updated
survey on domain adaptation methods for pointclouds.
1 INTRODUCTION
Many self-driving vehicles (SDV) rely on LiDAR
(Light Detection And Ranging) technology to per-
ceive their surroundings. There are multiple real-
world SDV largescale LiDAR annotated datasets in-
cluding KITTI (Geiger et al., 2013), nuScenes (Cae-
sar et al., 2019), Waymo (Sun et al., 2020), Lyft
(Kesten et al., 2019), Semantic-KITTI (Behley et al.,
2019), nuScenes LiDAR-Seg (Fong et al., 2021). This
has provided a large performance gain across various
supervised 3D detection and segmentation perception
pipelines. Though generating annotated pointcloud
datasets is a costly, meticulous & time consuming
process requiring a large number of human annota-
tors. Annotating real data also poses physical con-
straints on the position, number of obstacles as well
as type of dynamic scenarios.
Simulators have become a cheaper and scalable
alternative in terms of scenario diversity and time of
training. In comparison to simulation, real world an-
notation pipelines have these key operational issues:
1. Ensuring sensor calibration and synchronization
(e.g. Camera-Lidar or Radar-Lidar) to achieve
precise annotations when the pointclouds are
sparse.
2. Most road-datasets contain car as majority classes
due to the domain of operation. Though in real
world operations, certain zones can contain more
pedestrians. There is a change in class distribution
between the training and test domains.
3. Furthermore, annotation is often performed on
dense LiDAR pointclouds (64/32 layers). Trans-
fer learning from datasets to sparse multi-Lidar
pointclouds remains a big challenge.
To address these problems, autonomous driving sim-
ulators such as CARLA (Dosovitskiy et al., 2017)
can provide inexpensive source of synthetic annotated
data. Our contributions include :
• A short incremental review on the state of do-
main adaptation for pointclouds tasks, classifica-
tion, semantic segmentation & detection.
• A case study on 3D-object detection on our de-
ployment vehicle’s pointclouds which evaluates
the application of domain invariant representa-
tion learning using the correlation alignment loss
(CORAL) between simulation and real point-
clouds
• A qualitative analysis of the sources of the domain
gap between simulated and real pointclouds.
1.1 Domain Adaptation (DA) on
Pointclouds
In a typical deep learning application such as ob-
ject detection using LiDAR or Camera, a crucial as-
sumption made is that the training dataset domain
142
Zhang, W., Kiran, B., Gauthier, T., Mazouz, Y. and Steger, T.
Simulation-to-Reality Domain Adaptation for Offline 3D Object Annotation on Pointclouds with Correlation Alignment.
DOI: 10.5220/0011059200003209
In Proceedings of the 2nd International Conference on Image Processing and Vision Engineering (IMPROVE 2022), pages 142-149
ISBN: 978-989-758-563-0; ISSN: 2795-4943
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Table 1: Categorization of Domain adaptation methods for LiDAR pointclouds.
DA Methods Description
Aligning I/O rep-
resentations
Dataset-to-Dataset(D2D) transfer (Triess et al., 2021) involves transfer learning between
LiDAR Datasets collected with different LiDAR configurations (number, scanning pat-
ter, spatial resolution, different classes/label spaces) would require alignment either by
upsampling, downsampling, re-sampling of pointclouds. (Alonso. et al., 2021) class sen-
sitive data augmentation. These methods are frequently hand-engineered. (Tomasello
et al., 2019) present a Deep Sensor Cloning methods which enables the generation of
pointclouds from expensive LiDARs (HDL64) using CNNs along with in-expensive Li-
DARs (Scala).
Modeling
Physics
Authors (Hahner et al., 2021) have proposed a fog simulation method in pointclouds that
is applicable to any LiDAR dataset. (Zhao et al., 2020) learn dropout noise from real
world data.
Adversarial Do-
main Mapping
(ADM)
Learns a conditional mapping from source domain samples to their target domain sam-
ples using Generative Adversarial Networks (GANs). ADM can enable Simulation-to-
Real(S2R) DA. Annotations from simulation can be leveraged by mapping Simulated
clouds to real target domain clouds with subsequent training using source domain labels.
Authors (Sallab et al., 2019) map simulated BEV images to real world equivalents while
improving object detection performance.
Domain Invariant
Learning
These methods are usually adversarial methods that align the feature spaces between
source & target pointcloud domains, thus enforcing consistent prediction on target do-
main. CORAL loss based on (Sun et al., 2017) belongs to this family. Authors (Langer
et al., 2020) generate semi-synthetic pointclouds from the source data while performing
correlation alignment between synthetic target scans and target scans.
Simulation-To-
Real (S2R)
These families of methods focus on reducing the domain gap between simulation and
reality. Authors (DeBortoli et al., 2021) claims to have encouraged the 3D feature encoder
to extract features that are invariant across simulated and real scenes. Authors (Huang
and Qiao, 2021) generate synthetic pointclouds to train classification models instead of
aligning features. They are thus able to highlight which part of the object is transferred.
(also called source domain) and test data domain (tar-
get domain) share the same feature space distribu-
tion. This could be broken in multiple ways (non
IID sampling, IID referring to Independent and iden-
tically distributed) and is a key constraint in the per-
formance of DNNs in open operational domains. Do-
main adaption is a set of transformations (or repre-
sentation learning) that aligns the features between
source and target domains. Based on the availabil-
ity of labels in the target domain, DA can be super-
vised or unsupervised. Transfer learning is a subset
of supervised DA where labels in source domain can
be used to fine tune DNNs to their target domains,
though this is usually a costly process. Unsupervised
DA usually operates in target domains where there are
either no or very few labels.
Authors (Triess et al., 2021) and (Borna Be
ˇ
si
´
c
and Valada, 2021) provide surveys on DA
methods for the perception tasks (segmenta-
tion/detection/classification of pointclouds) in
LiDAR. We provide a summary of the taxonomy of
methods described by this survey in table 1. We have
updated the survey with new references and methods
from recent literature. Majority of these methods
are focused on unsupervised DA where there are
no target domain labels available. The goal here
is to highlight potential DA methods that could be
used to perform Simulation-To-Real(S2R) domain
adaptation.
1.2 Simulation-to-Real DA
In this subsection, we summarize key studies us-
ing simulation-to-real(S2R) domain adaptation (DA)
methods. This implies pre-training on simulated
pointclouds while evaluating on real-world point-
clouds. Authors (Yue et al., 2018) demonstrate the
first pointcloud simulator while showing a significant
improvement in accuracy (+9%) in pointcloud seman-
tic segmentation by augmenting the training dataset
with the generated synthesized data.
Another key issue in simulating LiDAR point-
clouds is generating sensor & material dependant in-
tensity channel output. Most simulators do not model
the intensity function, though mostly modeling ray
tracing and illumination operations. Authors (Wu
Simulation-to-Reality Domain Adaptation for Offline 3D Object Annotation on Pointclouds with Correlation Alignment
143
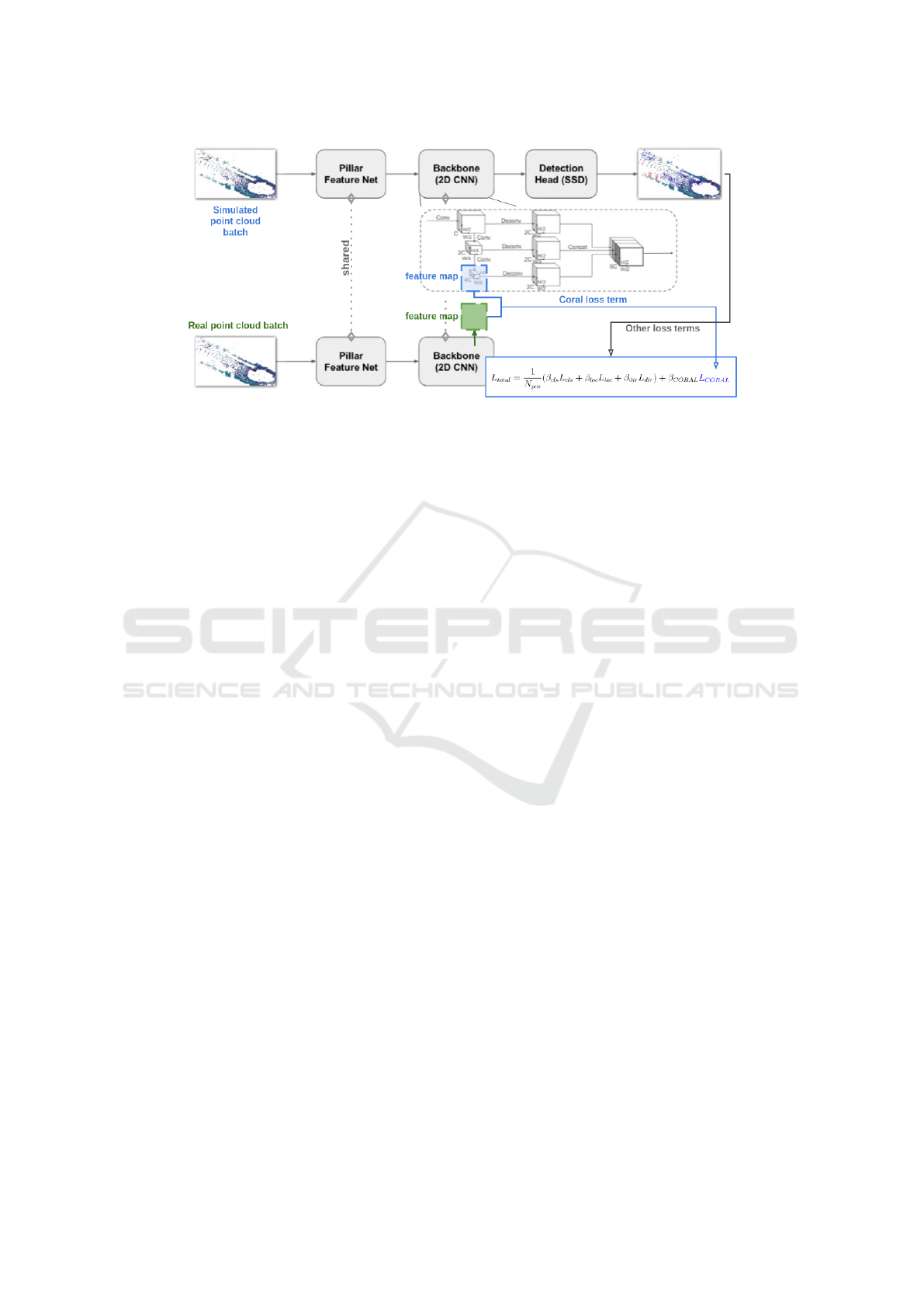
Figure 1: We reproduce the Pointpillars pipeline along with the CORAL loss between real & simulated feature maps.
et al., 2019) proposed a learned intensity rendering
network which regresses the intensity as a function of
the xyz coordinate channels in the range image. How-
ever this mapping from xyz-intensity is a highly non-
stationary function, since similar geometrical surfaces
(such as building wall and metal) could have drasti-
cally different intensity values. Thus learning these
mappings is a difficult process. (Vacek et al., 2021)
propose the use of RGB data along with xyz coor-
dinates to improve intensity regression on polished
parts of car bodyworks, windows, traffic signs and li-
cense/registration plates.
(Dworak et al., 2019) demonstrate the Sim-to-
Real transferability for 3D object detection between
CARLA and KITTI, using different mixtures (train-
ing on different combinations of datasets, sequential
fine tuning on the 2 datasets) of real and simulated
data to train Yolo3D, Voxelnet and Pointpillar archi-
tectures. They demonstrate there are significant gains
in performance for object detection. (Brekke et al.,
2019) evaluate simulated pre-training on both cam-
era images and lidar scans from CARLA, while train-
ing a AVOD-FPN network. Authors remark that real
world data cannot be replaced though simulated data
can considerably reduce the amount of training data
required to achieve target accuracy levels in the de-
tection task.
Authors (Fang et al., 2020) and (Manivasagam
et al., 2020) perform Real-To-Simulation (R2S) mod-
eling of pointclouds, where real-world scans (3D
maps of background) are used to build a catalog
of diverse scenarios. Recorded dynamic objects are
then inserted into these existing scenarios. This is
then used to train a robust 3D object detection. Au-
thors (Saltori et al., 2020) study dataset-to-dataset
domain adaptation between KITTI-nuScenes lever-
aging motion coherence across detections, reversible
scale transformations and pseudo-annotations. Au-
thors (Deschaud et al., 2021) have created the Paris-
CARLA-3D dataset, with simulated pointcloud and
camera data generated in CARLA while the real
world data was logged in Paris. The goal of the
dataset is to evaluate the unsupervised domain adap-
tation from CARLA to Paris data.
Authors (Meng et al., 2020) have also explored
weakly-supervised learning (annotating horizontal
centers of objects in bird’s view scenes) while learn-
ing to predict a full 3D bounding box.
2 SIMULATION-TO-REAL ON
CUSTOM LiDAR DATASET
In this section we focus on our experimental demon-
stration. Our goal here is to summarize the different
components of the simulation-to-real domain adapta-
tion experiment, namely the object detection archi-
tecture on pointclouds, the features being used by
the CORAL loss to perform correlation alignment be-
tween feature maps. This experiment shall be carried
out on our proprietary simulated and real pointcloud
dataset.
2.1 Simulated & Real Datasets
The simulated pointcloud dataset was generated with
16k multi-lidar scans. There was no ”Cyclist” class
included in the dataset and mainly constituted of
”Pedestrian” and ”Car” classes. The class frequen-
cies in the simulated dataset is show in figure 2. The
plots also demonstrate the polar histograms (range,
azimuth), where each cell in the plot contains the nor-
malized frequencies of bounding boxes visible across
the dataset.
IMPROVE 2022 - 2nd International Conference on Image Processing and Vision Engineering
144
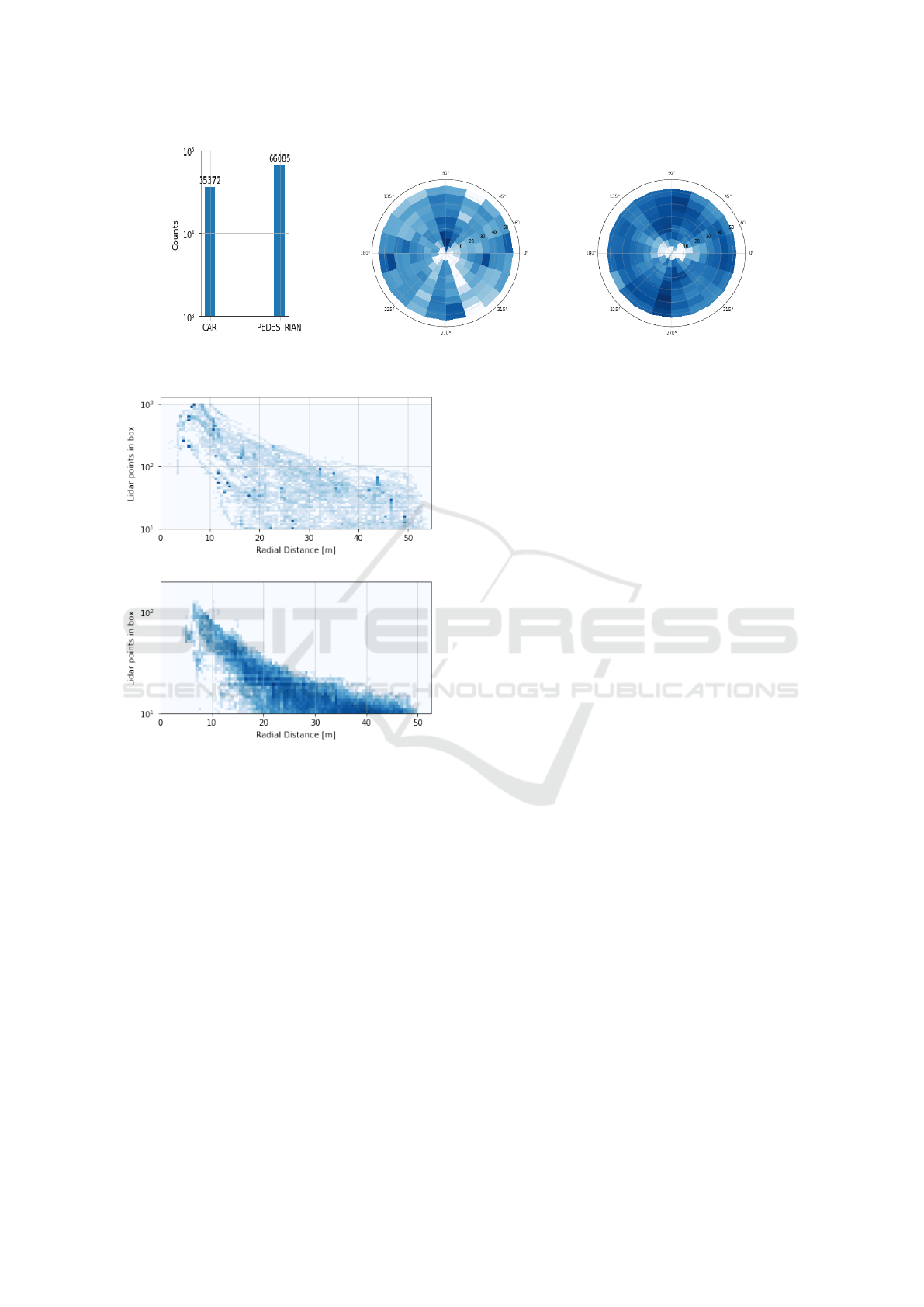
Figure 2: Class histogram in simulated dataset, along with polar density map for box annotations in dataset. The intensity
values were log-scaled.
Car.
Pedestrian.
Figure 3: Number of points with ground truth boxes as the
range of the box varies in the simulated dataset.
Real Pointclouds. The real pointcloud dataset was
constructed on board the target vehicle in operation at
our test site.
Labeled: We annotated a small dataset of LiDAR
pointclouds coming from the vehicles real domain of
operation. This contains merely 223 scans, arranged
in 4 continuous sequences. Each LIDAR scan con-
tains 16.9 points, 2k in minimum and 20.7 in maxi-
mum, with a median equals to 16.7k.
Unlabeled: To performed unsupervised domain
adaptation we used a large collection (1000 scans) of
LiDAR pointclouds coming from the vehicles real do-
main of operation with different obstacles (pedestrian
and cars mainly) in varied configurations.
Point Density per Box. The plot in figure 3 shows
the number points within ground truth boxes for each
category in the y axis, while the range/radius at which
the box is present. The plot for the car category is
very interesting as it doesn’t follow the pattern in the
public dataset, the relationship between point density
per box and distance to box center is looser in this
dataset. This empirical parameter is key to ensure ro-
bust feature extraction for the car category at different
point density within each bounding box. Filtering out
bounding boxes that contain very few points in the
real world dataset thus is demonstrated as a key man-
ual engineering step that directly affects the quality of
features being extracted within any given object de-
tection framework.
2.2 Pointpillars Architecture
The pipeline of the Pointpillars consists of three main
parts: Pillar Feature Network, Backbone and SSD De-
tection Head, as shown below.
Pillar Feature Net is a feature encoder network
that converts a pointcloud to a sparse pseudo-image
composed by two modules. The input pointcloud is
first discretised into an evenly spaced grid in the x-y
plane. A tensor of size (D,N) is then calculated for
each voxel, where D is the dimension of feature for
each sampled point in the pillar and N is the max-
imum number of points per pillar. Thus the point-
cloud is converted into a stacked-pillars tensor of size
(D,P,N), where P denotes the number of non-empty
pillars per pointcloud.
A layer consists of a Linear-BatchNorm-ReLU
follows to extract pillar-wise features, with max pool-
ing over the channels to create an output tensor of size
(C,P). Then the features are scattered back to the orig-
inal pillar locations to create a pseudo-image of size
(C,H,W), where C is number of channels fixed to 64.
Backbone consists in blocks of top-down 2D
CNNs, which can be characterized by a series of
blocks. Each top block has 2D convolutional layers
to reduce the 2D tensor sizes into half, followed by
BatchNorm and a ReLU. The processed tensors are
Simulation-to-Reality Domain Adaptation for Offline 3D Object Annotation on Pointclouds with Correlation Alignment
145

combined through upsampling and concatenation, as
shown above.
SSD Detection Head is a detection head that fi-
nally detects and regresses 3D boxes in Pointpillars.
The prior boxes are matched to the ground truth using
IoU.
2.3 Coral Loss
We use the CORAL loss (Sun et al., 2017) to reduce
the geodesic distance between the simulated and real
pointclouds. The same method could also be used
to minimize distance between embeddings of point-
clouds coming from different LiDAR configurations.
The CORAL loss is described between two do-
mains for a single feature layer. Given source-domain
training examples D
S
= {x
i
}, x ∈ R
d
with labels L
s
=
{y
i
}, i ∈ {1, 2, ..., L}, and unlabeled target data D
T
=
{u
i
}, x ∈ R
d
. Suppose the number of source and target
data are n
S
and n
T
respectively. Here, both x and u are
the d-dimensional deep layer activations φ(I) of input
I that we are trying to learn. Let D
i j
S
/D
i j
T
be the j-th
dimension of the i-th source/target data, C
S
/C
T
denote
the 2D feature covariance matrices. The CORAL loss
ie. the distance between the source and target features
is defined as:
L
DA
=
1
4d
2
||C
S
−C
T
||
2
F
(1)
where || · ||
2
F
denotes the squared matrix Frobenius
norm.
2.4 Pipeline
Figure 1 shows the Pointpillars architecture using
CORAL loss for deep domain adaptation.
The two mini-batches batches of simulate and
real pointclouds pass through the shared backbone
pipeline. The CORAL loss is evaluated at the end
of the 2D backbone as the feature map considering its
reduced size as shown in figure 1.
The shape of this feature map is (bn, 4C, H/8,
W/8), where bn is the batch size, C is the channel
number output by PFN, which is set to 64, while H
and W represent the size of the pillar grids in the xy
plane.
For a pointcloud ranged in ±50m both in x and y
with a grid size of 0.25m, the feature map shape in
our experiment is (bn, 256, 50, 50). As the CORAL
loss L
CORAL
needs a pair of 2-dimension inputs, we
chose to reshape the feature map into (256bn, 2500).
And the Loss function is modified to:
L
total
=
1
N
pos
(β
cls
L
cls
+ β
loc
L
loc
+ β
dir
L
dir
) + β
DA
L
DA
(2)
Where β
DA
is the weight for the CORAL loss.
L
cls
, L
loc
and L
DA
represent the classification, local-
ization and CORAL domain adaptation loss terms.
3 EXPERIMENT & RESULTS
In this section, We describe the dataset setup and ex-
periments performed with different hyperparameters
to demonstrate the effect of adding a domain adapta-
tion loss based on CORAL.
In our study we use the data from simulation
which contains 12646 scans as labeled pipeline in-
put, and 2 sequences of unlabeled real vehicle data
which contains around 500 scans. Both of the input
pointclouds are ranged within 50m in both x and y
axis, [−3, 1]m in z axis. Similar to what is done in
nuScenes, the point pillar is sized to 0.25m×0.25m
with max number of points per pillar set to 60. Zero
padding is applied for not fully filled pillars.
Performance metrics measured were using the of-
ficial KITTI evaluation toolkit (Geiger et al., 2013)
and nuScenes devkit. The four metrics used in our ex-
periments denote respectively as mean average preci-
sion in BEV, 3D, 2D (image plane), and Average Ori-
entation Similarity (AOS). In this section we’ll step
from basic conceptions to explain how these metrics
are calculated. Some of them are not directly used
but fundamental to understand the PASCAL criteria
introduced in object detection.
The performance metrics of simulation trained
model on real data can be seen in table 2 . We present
3 experiments on sim-to-real domain adaptation, the
loss curves are shown below in 4. The three mod-
els are represented by different colors, where the blue
ones denotes the model with batch size 8, CORAL
loss weight β
DA
= 1e8, the violet ones denote the
model with batch size 4, CORAL loss weight β
DA
=
1e8, and the red ones denotes the model with batch
size 4, CORAL loss weight β
DA
= 1e9 . The localiza-
tion, classification and CORAL losses are shown. The
weight β
DA
was chosen to balance the contribution of
the localization, classification & CORAL losses.
From these loss curves we find that the CORAL
loss converges quickly in the first several training
epochs. The final converged loss shares a similar
value despite the large weighting, while using a larger
batch size seems to result in a smaller CORAL loss
magnitude. A higher CORAL loss weight hinders
the descent of classification/location loss curves over
the source domain simulated Shuttle A. We conclude
that applying appropriate weighted CORAL loss with
short training epochs improves the performance on
real data.
IMPROVE 2022 - 2nd International Conference on Image Processing and Vision Engineering
146
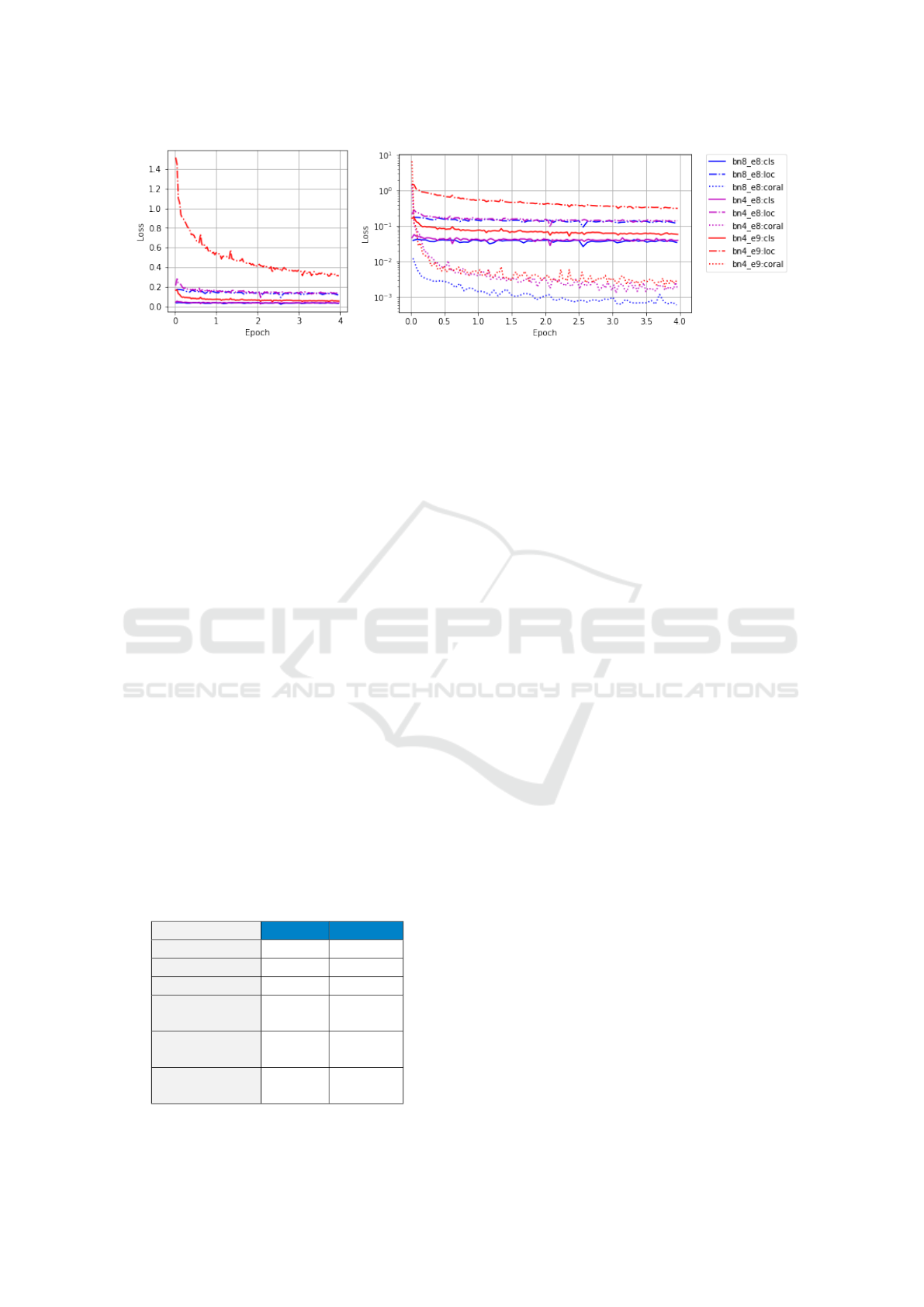
Figure 4: The plot on the left represents the global loss, while plot on the right represent the localization, classification and
Coral Loss curves. Different experiments with batch sizes 4 & 8 (bn4 and bn8 respectively), and CORAL loss weighting
β
DA
= 1e8 & 1e9 are demonstrated. The loc, cls refer to the localization and classification losses.
4 SOURCES OF S2R DOMAIN
GAP
In our experiments with simulator we noticed a few
key issues with the way simulated pointclouds were
generated, and subsequently causing problems dur-
ing training. We highlightg these qualitative issues
for future improvement of Simulation to Real (S2R)
domain transferability.
Synthetic vs Real Pointclouds: We observed a
sharp dropout noise in the real world pointclouds,
while simulated pointclouds where spatio-temporally
consistent. This corresponded to 30% drop in points
in the real world pointclouds. This drop in point den-
sity has a direct negative effect on the quality recall in
the real world. Pointcloud subsampling procedures
are a key component to tune the S2R domain gap
here. This sampling pattern has been studied sepa-
rately as a topic by authors in (Yang et al., 2020).
Further on, while real world pointclouds had multi-
ple return outputs (range) simulated pointclouds had
a single return value. We also have not modeled the
presence of dropout noise in the LiDAR pointclouds
Table 2: The table demonstrates the gain in performance in
3D detection metrics, with and without the application of
DA using the CORAL loss term.
w/o DA with DA
Car-bev@0.50 8.82 12.56
Car-bev@0.70 6.06 4.54
Car-aos 36.77 56.76
Pedestrian
bev@0.25
0.06 0.03
Pedestrian
bev@0.50
0.00 0.00
Pedestrian
aos
10.88 12.40
yet in this study, which reduces the number of points
drastically. Finally real world pointclouds undergo
motion distortion due to ego-vehicle motion, while
simulated pointclouds do not explicitly model this be-
havior. This might be important for vehicles driving
at high speeds.
The pointclouds in the real world contain shad-
owed regions with no points, created due to the pres-
ence of the ego-vehicle. While in the simulated
pointclouds, the pointclouds contain no ego-vehicle
shadow. It is as if the ego-vehicle is transparent and
the sensors on the vehicle gather data without any vis-
ibility through ego-vehicle taken into account. This is
demonstrated via a BEV image over simulated and
real vehicle pointclouds in figure 5. Further more ob-
jects found partially within the shadow are annotated
in simulation while real pointclouds frequently con-
tain very few points on the object. This might lead to
over-fitting issues while training on simulation data.
Pointcloud Sparsity: To avoid the sparse gen-
erated pointclouds it could be better to have a pre-
processing step that removes ground truth (GT) boxes
with very low point occupancy. Also, ground truth
bounding boxes contain variable number of points.
Thus varying the sparsity of the pointclouds in the
voxels could help train a better Pointpillar backbone.
Selecting GT Boxes within Sensor FOV and
Range: The CARLA simulator provides bounding
boxes of all agents in the virtual city irrespective of
their visibility to the LiDAR sensor. Points on objects
at large range values are no more visible though their
corresponding bounding boxes have are still provided
by CARLA. The same is applicable with objects in
non line positions, eg. behind another vehicle. We
manually filter out such detections by thresholding
boxes based on the number of points within them.
Simulator Rendering Issues: LiDAR point-
clouds are a spatio-temporal stream in the real-
world while the simulated pointclouds are received
Simulation-to-Reality Domain Adaptation for Offline 3D Object Annotation on Pointclouds with Correlation Alignment
147
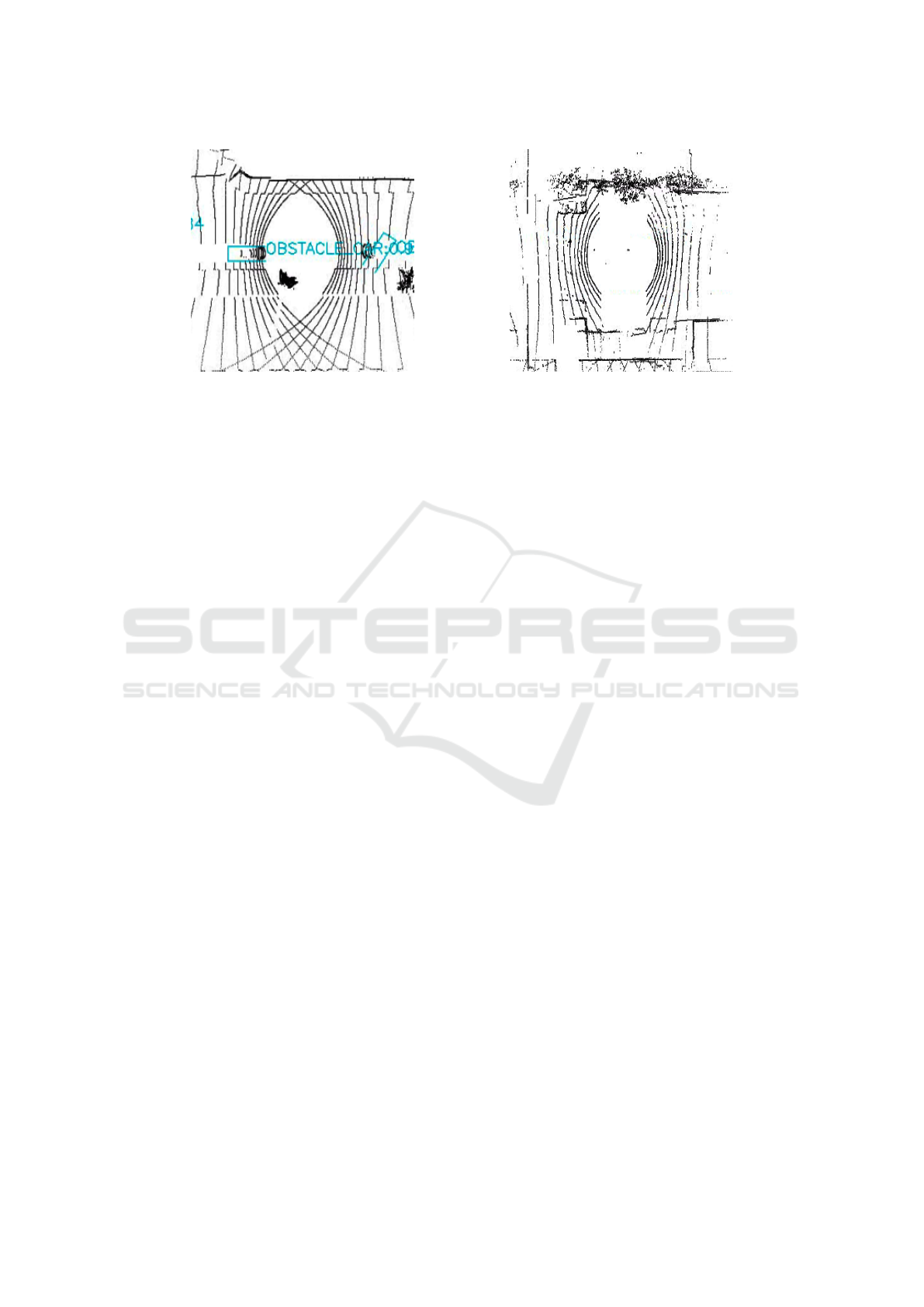
Figure 5: Simulated vs Real vehicle shadow.
as frames. This might lead to some differences in
how object bounding boxes might be rendered by the
simulator leading to un-correlated shifts between the
bounding box and rendered pointclouds. As a result,
we observed part of the points that actually belongs
to a car ( 20-30% at maximum) may fall outside its
ground truth bounding box. This issue appears in
frames mainly when the objects are dynamic with re-
spect to the ego vehicle location.
5 CONCLUSION
The key goal of this study is to evaluate the
simulation-to-real transferability of point-cloud-
based 3D object detection model performance. We
evaluated the performance of the Pointpillars 3D
detector on KITTI and nuScenes datasets. This
model was further modified to be trained on simu-
lated datasets generated with the CARLA simulator,
before predicting on real data collected with vehicles
in production. The final goal was to obtain bounding
box predictions on the real vehicle pointclouds and
alleviate the annotators work with automation of the
annotation process.
One of the main down sides in using CORAL loss
is the size of the covariance matrices over real and
simulated feature maps. Large matrices can not be
evaluated and thus we are limited to low resolution
feature maps.
In future work we aim to study the usage of do-
main randomization (Johnson-Roberson et al., 2017)
to help reduce the simulation-to-real gap by random-
izing parameters of the simulator.
ACKNOWLEDGEMENTS
We would like to thank Barth
´
elemy Picherit & mem-
bers of simulation team for their support and col-
laboration during this project. We thank Alexandre
Almin from Navya for his comments on the paper.
This work is part of the Deep Learning Segmentation
(DLS) project financed by ADEME.
REFERENCES
Alonso., I., Riazuelo., L., Montesano., L., and Murillo., A.
(2021). Domain adaptation in lidar semantic segmen-
tation by aligning class distributions. In Proceedings
of the 18th International Conference on Informatics in
Control, Automation and Robotics - ICINCO,, pages
330–337. INSTICC, SciTePress.
Behley, J., Garbade, M., Milioto, A., Quenzel, J., Behnke,
S., Stachniss, C., and Gall, J. (2019). Semantickitti:
A dataset for semantic scene understanding of lidar
sequences. In Proceedings of the IEEE/CVF Interna-
tional Conference on Computer Vision, pages 9297–
9307.
Borna Be
ˇ
si
´
c, Nikhil Gosala, D. C. and Valada, A. (2021).
Unsupervised domain adaptation for lidar panoptic
segmentation. arXiv preprint arXiv:2109.15286.
Brekke,
˚
A., Vatsendvik, F., and Lindseth, F. (2019). Mul-
timodal 3d object detection from simulated pretrain-
ing. In Symposium of the Norwegian AI Society, pages
102–113. Springer.
Caesar, H., Bankiti, V., Lang, A. H., Vora, S., Li-
ong, V. E., Xu, Q., Krishnan, A., Pan, Y., Baldan,
G., and Beijbom, O. (2019). nuscenes: A multi-
modal dataset for autonomous driving. arXiv preprint
arXiv:1903.11027.
DeBortoli, R., Fuxin, L., Kapoor, A., and Hollinger, G. A.
(2021). Adversarial training on point clouds for sim-
to-real 3d object detection. IEEE Robotics and Au-
tomation Letters, 6(4):6662–6669.
Deschaud, J.-E., Duque, D., Richa, J. P., Velasco-Forero, S.,
Marcotegui, B., and Goulette, F. (2021). Paris-carla-
IMPROVE 2022 - 2nd International Conference on Image Processing and Vision Engineering
148

3d: A real and synthetic outdoor point cloud dataset
for challenging tasks in 3d mapping. Remote Sensing,
13(22).
Dosovitskiy, A., Ros, G., Codevilla, F., Lopez, A., and
Koltun, V. (2017). CARLA: An open urban driving
simulator. In Proceedings of the 1st Annual Confer-
ence on Robot Learning, pages 1–16.
Dworak, D., Ciepiela, F., Derbisz, J., Izzat, I., Ko-
morkiewicz, M., and W
´
ojcik, M. (2019). Perfor-
mance of lidar object detection deep learning architec-
tures based on artificially generated point cloud data
from carla simulator. In 2019 24th International Con-
ference on Methods and Models in Automation and
Robotics (MMAR), pages 600–605. IEEE.
Fang, J., Zhou, D., Yan, F., Zhao, T., Zhang, F., Ma, Y.,
Wang, L., and Yang, R. (2020). Augmented lidar sim-
ulator for autonomous driving. IEEE Robotics and
Automation Letters, 5(2):1931–1938.
Fong, W. K., Mohan, R., Hurtado, J. V., Zhou, L., Cae-
sar, H., Beijbom, O., and Valada, A. (2021). Panop-
tic nuscenes: A large-scale benchmark for lidar
panoptic segmentation and tracking. arXiv preprint
arXiv:2109.03805.
Geiger, A., Lenz, P., Stiller, C., and Urtasun, R. (2013).
Vision meets robotics: The kitti dataset. The Inter-
national Journal of Robotics Research, 32(11):1231–
1237.
Hahner, M., Sakaridis, C., Dai, D., and Van Gool, L. (2021).
Fog simulation on real lidar point clouds for 3d object
detection in adverse weather. In Proceedings of the
IEEE/CVF International Conference on Computer Vi-
sion, pages 15283–15292.
Huang, J. and Qiao, C. (2021). Generation for adaption:
A gan-based approach for 3d domain adaption with
point cloud data. ArXiv, abs/2102.07373.
Johnson-Roberson, M., Barto, C., Mehta, R., Sridhar, S. N.,
Rosaen, K., and Vasudevan, R. (2017). Driving in the
matrix: Can virtual worlds replace human-generated
annotations for real world tasks? In 2017 IEEE In-
ternational Conference on Robotics and Automation
(ICRA), pages 746–753. IEEE.
Kesten, R., Usman, M., Houston, J., Pandya, T., Nad-
hamuni, K., Ferreira, A., Yuan, M., Low, B., Jain, A.,
Ondruska, P., Omari, S., Shah, S., Kulkarni, A., Kaza-
kova, A., Tao, C., Platinsky, L., Jiang, W., and Shet,
V. (2019). Level 5. Perception Dataset 2020.
Langer, F., Milioto, A., Haag, A., Behley, J., and Stach-
niss, C. (2020). Domain transfer for semantic seg-
mentation of lidar data using deep neural networks.
In 2020 IEEE/RSJ International Conference on Intel-
ligent Robots and Systems (IROS), pages 8263–8270.
IEEE.
Manivasagam, S., Wang, S., Wong, K., Zeng, W.,
Sazanovich, M., Tan, S., Yang, B., Ma, W.-C., and
Urtasun, R. (2020). Lidarsim: Realistic lidar simu-
lation by leveraging the real world. In Proceedings
of the IEEE/CVF Conference on Computer Vision and
Pattern Recognition, pages 11167–11176.
Meng, Q., Wang, W., Zhou, T., Shen, J., Gool, L. V., and
Dai, D. (2020). Weakly supervised 3d object detection
from lidar point cloud. In European Conference on
Computer Vision, pages 515–531. Springer.
Sallab, A. E., Sobh, I., Zahran, M., and Essam, N.
(2019). Lidar sensor modeling and data augmenta-
tion with gans for autonomous driving. arXiv preprint
arXiv:1905.07290.
Saltori, C., Lathuili
´
ere, S., Sebe, N., Ricci, E., and Galasso,
F. (2020). Sf-uda 3d: Source-free unsupervised do-
main adaptation for lidar-based 3d object detection.
In 2020 International Conference on 3D Vision (3DV),
pages 771–780. IEEE.
Sun, B., Feng, J., and Saenko, K. (2017). Correlation align-
ment for unsupervised domain adaptation. In Domain
Adaptation in Computer Vision Applications, pages
153–171. Springer.
Sun, P., Kretzschmar, H., Dotiwalla, X., Chouard, A., Pat-
naik, V., Tsui, P., Guo, J., Zhou, Y., Chai, Y., Caine,
B., et al. (2020). Scalability in perception for au-
tonomous driving: Waymo open dataset. In Proceed-
ings of the IEEE/CVF Conference on Computer Vision
and Pattern Recognition, pages 2446–2454.
Tomasello, P., Sidhu, S., Shen, A., Moskewicz, M. W., Red-
mon, N., Joshi, G., Phadte, R., Jain, P., and Iandola,
F. (2019). Dscnet: Replicating lidar point clouds with
deep sensor cloning. In Proceedings of the IEEE/CVF
Conference on Computer Vision and Pattern Recogni-
tion Workshops, pages 0–0.
Triess, L. T., Dreissig, M., Rist, C. B., and Z
¨
ollner, J. M.
(2021). A survey on deep domain adaptation for lidar
perception. In Proc. IEEE Intelligent Vehicles Sympo-
sium (IV) Workshops.
Vacek, P., Ja
ˇ
sek, O., Zimmermann, K., and Svoboda, T.
(2021). Learning to predict lidar intensities. IEEE
Transactions on Intelligent Transportation Systems.
Wu, B., Zhou, X., Zhao, S., Yue, X., and Keutzer, K.
(2019). Squeezesegv2: Improved model structure
and unsupervised domain adaptation for road-object
segmentation from a lidar point cloud. In 2019 In-
ternational Conference on Robotics and Automation
(ICRA), pages 4376–4382. IEEE.
Yang, Z., Sun, Y., Liu, S., and Jia, J. (2020). 3dssd: Point-
based 3d single stage object detector. In Proceedings
of the IEEE/CVF conference on computer vision and
pattern recognition, pages 11040–11048.
Yue, X., Wu, B., Seshia, S. A., Keutzer, K., and
Sangiovanni-Vincentelli, A. L. (2018). A lidar point
cloud generator: from a virtual world to autonomous
driving. In Proceedings of the 2018 ACM on Inter-
national Conference on Multimedia Retrieval, pages
458–464.
Zhao, S., Wang, Y., Li, B., Wu, B., Gao, Y., Xu, P., Dar-
rell, T., and Keutzer, K. (2020). epointda: An end-to-
end simulation-to-real domain adaptation framework
for lidar point cloud segmentation. arXiv preprint
arXiv:2009.03456, 2.
Simulation-to-Reality Domain Adaptation for Offline 3D Object Annotation on Pointclouds with Correlation Alignment
149
