
An Improved YOLOv5 for Real-time Mini-UAV Detection in No Fly
Zones
Tijeni Delleji
1,2 a
and Zied Chtourou
1 b
1
Science and Technology for Defense Lab (STD), Military Research Center, Taeib Mhiri City, Aouina, 2045, Tunis, Tunisia
2
Digital Research Center of Sfax, 3021 Sfax, Tunisia
Keywords:
Mini-UAV, YOLOv5, Dahua Multi-sensor Camera, Object Detection, Tiny and Small Objects, Air Image,
Real-time, No Fly Zones.
Abstract:
In the past few years, the manufacturing technology of mini-UAVs has undergone major developments. There-
fore, the early warning optical drone detection, as an important part of intelligent surveillance, is becoming a
global research hotspot. In this article, the authors provide a prospective study to prevent any potential hazards
that mini-UAVs may cause, especially those that can carry payloads. Subsequently, we regarded the problem
of detecting and locating mini-UAVs in different environments as the problem of detecting tiny and very small
objects from an air image. However, the accuracy and speed of existing detection algorithms do not meet
the requirements of real-time detection. For solving this problem, we developed a mini-UAV detection model
based on YOLOv5. The main contributions of this research are as follows: (1) a mini-UAV dataset of air
pictures was prepared using Dahua multi-sensor camera; (2) a tiny and very small object detection layers are
added to improve the model’s ability to detect mini-UAVs. The experimental results show that the overall per-
formance of the improved YOLOv5 is better than the original. Therefore, the proposed mini-UAV detection
technology can be deployed in monitor center in order to protect a No Fly Zone or a restricted area.
1 INTRODUCTION
The International Civil Aviation Organization (ICAO)
denotes by “drone” any Unmanned Aerial Vehi-
cle (UAV). Furthermore, the Air Force Special Op-
erations Command (AFSOC) gave additional three
names for a drone: a flying robotic system, an Un-
manned Aircraft System (UAS), and a micro air ve-
hicle (MAV)(United States Air Force, 2009),(Doyle,
2013). So, to simplify, an UAV is an aircraft either
controlled by pilot via RF remote controlller or in-
creasingly, autonomously following a mission plan-
ner through flight controller. In the same context,
Maddalon et al.(Maddalon et al., 2013) and Lykou
et al.(Lykou et al., 2020)have mentioned that for the
NATO (North Atlantic Treaty Organization) classi-
fication, UAVs weighting between 2 and 25 kg are
called mini-UAVs. So, a mini-UAV can carry an
operating payload up to 15 kg, e.g. the DJI MA-
TRICE 600 which weighs 10kg is capable of car-
rying a 6 kg payload for 16 minutes (DJI, 2021).
a
https://orcid.org/0000-0003-1323-8520
b
https://orcid.org/0000-0001-7154-6906
Over the last few years, the manufacturing technology
of mini-Unmanned aerial vehicles (mini-UAVs), also
known mini drones, has been experiencing a signif-
icant evolution. There are multiple usages for mini-
UAVs, including: precision agriculture for Spraying
Operation, professional aerial photography and indus-
trial applications (Seidaliyeva et al., 2020). How-
ever, the polyvalence of this type of flying gadgets
made it accessible to everyone, particularly to terror-
ist groups. Therefore, we can conclude that the detec-
tion of mini-UAVs before serious attacks in restricted
areas, especially for ”No Fly Zones”(NFZ), is of the
utmost interest. Pointing out that NFZs , i.e. territo-
ries over which no aircraft are allowed to fly, include
the world’s major airports, the borders between two
sovereign countries or regions, major cities/regions,
etc.
Consequently, in this work we will treat the is-
sue of detecting and localizing mini-UAV in diverse
environments as a problem of very small object de-
tection from an aerial perspective image. To set the
record straight, an air image or ground-to-aerial per-
spective image is mostly a picture of a flying object
that must include sky background, taken by a ground-
174
Delleji, T. and Chtourou, Z.
An Improved YOLOv5 for Real-time Mini-UAV Detection in No Fly Zones.
DOI: 10.5220/0011065400003209
In Proceedings of the 2nd International Conference on Image Processing and Vision Engineering (IMPROVE 2022), pages 174-181
ISBN: 978-989-758-563-0; ISSN: 2795-4943
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

based imaging system, typically used to monitor a No
Fly Zone or a restricted area. The real-time object de-
tection applied to UAV monitoring is really crucial.
Nevertheless, these applications need early detection
of objects so that they can be used later as inputs for
other activities. Due to early detection, the appear-
ance of the objects is generally very small. In general,
the aim of tiny object detection is to detect objects
that belong to the image and are tiny in size, which
implies that the objects of interest are objects that ei-
ther have a large physical appearance but occupy only
a tiny area in an image, or have a really tiny appear-
ance. Improvements in object detection algorithms
allow faster and more accurate results.
The most recent methods using deep Convolu-
tional Neural Networks (Deep CNN) usually involve
several steps. First, specify the objects of interest in
the image, then pass them through the Deep CNN
for feature extraction and then classify them using
supervised classification techniques. Finally, mixing
the results between the objects to properly mark the
bounding box. In Deep CNN models there are mainly
two categories of current state-of-art object detectors:
single-stage and two-stage detectors. On one hand,
the single stage detectors, are represented by SSD
(Single Shot multibox Detector)(Liu et al., 2016) that
runs a convolutional network on input image only
once, calculates a feature map and predicts a de-
tection; and YOLO (You Only Look Once)(Redmon
et al., 2016), that treats object detection as a simple
regression problem by tacking an input image and
learning the class probabilities and bounding box co-
ordinates. Such models (SSD and YOLO) are pro-
posed by considering both accuracy and processing
time. On the other hand, the two-stage detectors, in-
clude the Faster R-CNN (Region-based convolutional
Neural Networks) (Ren et al., 2015) that uses a region
proposal networks to generate regions of interests in
the first stage; and Mask R-CNN (He et al., 2017) that
sends the region proposals down the pipeline for ob-
ject classification and bunding box regression. Such
models perform well in term of accuracy, in particu-
lar the faster R-CNN with an accuracy of 73% mAP.
But due to their very complex pipeline, these two-
stage detectors perform poorly in terms of speed with
7 frames per second (FPS), which restricts them for
real-time object detection.
Since real-time is a challenge in optical early
warning UAV detection, in our work, we will propose
a CNN architecture based on a detection method with
fast processing speed. Especially YOLO performs
well compared to previous region-based algorithms in
terms of speed with 45 FPS while maintaining a good
detection accuracy more than 63% mAP (Rahim et al.,
2021). Although the speed and accuracy were good,
YOLOv1 (YOLO first version) (Redmon et al., 2016)
made some remarkable localization errors. In other
words, the bounding boxes predicted by YOLOv1 are
not accurate. So, to overcome the deficiencies of
YOLOv1, the creators of YOLO launched YOLOv2
(YOLO second version) (Redmon and Farhadi, 2017)
where the similarity of predicted bounding box to the
ground truth bounding box, and the percentage of to-
tal relevant objects correctly classified, were mainly
focused without impairing the accuracy of the clas-
sification. Moreover, YOLOv2, which called also
YOLO9000 (Redmon and Farhadi, 2017), gained a
speed of 59 FPS and mAP of 77.8% in experiments
on the PASCAL VOC 2007 dataset(Everingham et al.,
2014), (Everingham et al., 2010). The YOLOv3 (the
third version of YOLO) (Redmon and Farhadi, 2018),
whose main improvement is the addition of multi-
scale prediction, has brought further improvements
in speed and accuracy. In experimenting with MS
COCO (Lin and Maire, 2014), (Kim, 2017)dataset,
YOLOv3 obtained 55% AP score and achieved a real-
time speed of approximately 200 FPS on Tesla V100.
YOLOv4 (YOLO fourth version) was released on 23
April 2020 and YOLOv5 on 10 June 2020. However,
YOLOv4 (Bochkovskiy et al., 2020), (Wang et al.,
2021d) was released in the Darknet framework, while
YOLOv5 (Wang et al., 2021d) ,(Ultralytics, 2021),
(Ahmed and Kharel, 2021), (Wang et al., 2021b),
(Yan et al., 2021), (Yang et al., 2020) has been re-
leased in the Ultralytics PyTorch framework. Despite
the fact that YOLOv4 can reach 43.5% AP on MS
COCO (COCO, 2021)and 65 FPS speed, the devel-
opers of YOLOv5 claim that in a YOLOv5 Collab
notebook, running a Tesla P100, they found inference
times of up to 0.007 seconds per image, meaning 140
frames per second (FPS) (Yan et al., 2021). In con-
trast, YOLOv4 achieved 50 FPS after having been
converted to the same Ultralytics PyTorch library (Ul-
tralytics, 2021). Not only that, they also mentioned
that YOLOv5 is smaller. Specifically, the YOLOv5
file weights 27 megabytes. However, the weights
file for YOLOv4 (with Darknet architecture) is 244
megabytes. So, YOLOv5 is about 88% smaller than
YOLOv4 (Roboflow, 2021). The development of new
versions of YOLO is not finished. In Oct 28, 2021
Yuxin et al. (Fang et al., 2021) have launched the
YOLOS (You Only Look at One Sequence) . It is a
series of object detection models based on the vanilla
Vision Transformer with the fewest possible modifi-
cations, region priors, as well as inductive biases of
the target task. However, despite that other variants
of YOLO are developed such as YOLOX (Ge et al.,
2021), YOLOv5 remains more practical in real time
An Improved YOLOv5 for Real-time Mini-UAV Detection in No Fly Zones
175
tasks
All in all, YOLOv5, with its latest v6.0 version
released in January 2022, claims to be fast, has a
very light model size, trains quickly, makes inferences
quickly, and is comparable to YOLOv4 in accuracy.
(Adibhatla et al., 2021).
This paper focuses on detect mini-drones based on
ground to aerial perspective images, more precisely
the AI techniques used for early detection and local-
ization. The goal is to obtain a real-time and accu-
rate deep-CNN object detector which will be able to
correctly detect and locate mini-drones supporting a
payload, in order to start a neutralization system. The
main contributions of this work can be summarized as
follows:
(1) We collect images of mini-UAVs in a real en-
vironment, most of which contain flying mini-UAVs
in poor visibility conditions. Subsequently, we build
a custom dataset, called “mini-UAV dataset”, which
provides a benchmark to evaluate the performance of
the proposed detection model.
(2) We develop a mini-UAV detection model by
redesigning the YOLOv5 object detector(Ultralytics,
2021), (Wang et al., 2021b). Moreover, we imple-
ment key modifications to the network to improve the
behavior of the model in terms of performance. So,
the redesigned model uses features learned by a deep
CNN to focus on very small flying object detection in
aerial perspective.
The remainder of this paper is partitioned as fol-
lows. We present the issues of object detection and
the neural architecture of the YOLO model in Section
2. A mini-UAV targets real-time detection algorithm
based on improved YOLOv5 is presented in Section
3, and the results are discussed in Section 4. Finally,
Section 5 concludes the study.
2 RELATED WORKS
2.1 Issues in Deep Object Detection
Deep Object detection is a Deep Learning powered
computer vision technique that consists of identifying
and locating instances of an object of a certain class
within an image or a video. The deep learning-based
object detectors (i.e,. Deep detectors) usually have
two parts: one is a skeleton or encoder that takes an
air image as input and passes it through a sequence of
blocks and layers that learn to extract statistical fea-
tures used to locate and annotate flying objects. And
the other called a head or a decoder, it is the main part
used to predict bounding boxes and labels of objects.
In addition, object detectors developed in recent years
usually have some layers inserted between the skele-
ton and the head, and usually used to collect feature
maps at different stages. We can call it the neck of
the object detector (Bochkovskiy et al., 2020), (Yan
et al., 2021). So, the detector needs to meet the fol-
lowing conditions:
i.Higher input network scale (resolution)-used to
detect multiple very small objects;
ii.Higher layers – higher receptive fields to cover
the expanding scale of the input network;
iii.More parameters improve the model’s ability to
detect multiple objects of different sizes in a single
image.
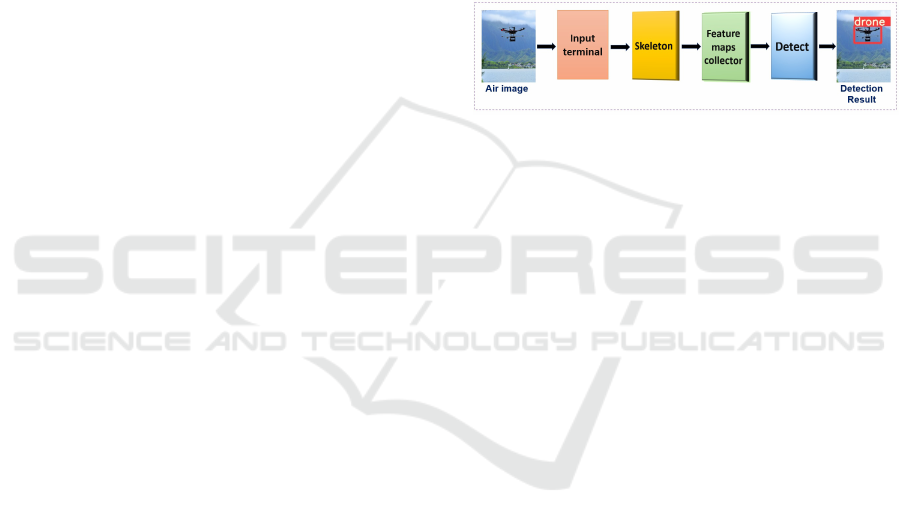
In summary, the general object detector consists
of the parts presented by Figure 1.
Figure 1: Concept of architectural object detection for
ground to aerial perspective image.
Although these detectors remain benchmarks, re-
search in this area is far from complete and many dif-
ficulties remain. An interesting summary of some of
the challenges is presented in the review by Agarwal
et al.(Agarwal et al., 2019).
• Occlusions: This problem, which exists in most
applications, is an issue since some of the informa-
tion is hidden. Thus, providing examples containing
occlusions in the training dataset may partially solve
the problem but will not represent all forms of occlu-
sion.
• Very small or tiny objects: detecting very small
objects is more difficult than detecting medium or
large ones. This is due to many factors such as lack
of associated information, inaccurate localization and
confusion of objects with the background image. So,
to overcome this problem, solutions vary in terms
of complexity from simple scaling to the use of sur-
face networks, coarse and fine networks to a super-
resolution method that could be implemented with a
variant of GAN learning (Wang et al., 2021c) to rep-
resent very small objects with higher resolutions. In
addition, low image resolution could cause the same
problems and thus require a super-resolution method.
2.2 Visualization of YOLO Network
Architecture
The YOLO is a technique based on regression. In-
stead of selecting the relevant part of an image,
IMPROVE 2022 - 2nd International Conference on Image Processing and Vision Engineering
176
it predicts classes and bounding boxes for the en-
tire image in a single run of the algorithm. So,
the idea of YOLO originated from the extension of
the basic CNN (Convolutional Neural Network) idea
from classification tasks to detection. The YOLO
series (from YOLOv0 to YOLOv5) is a regression
method based on deep learning. So, the last version:
YOLOv5(Wang et al., 2021d) ,(Ultralytics, 2021),
(Ahmed and Kharel, 2021), (Wang et al., 2021b),
(Yan et al., 2021), is basically modified on the struc-
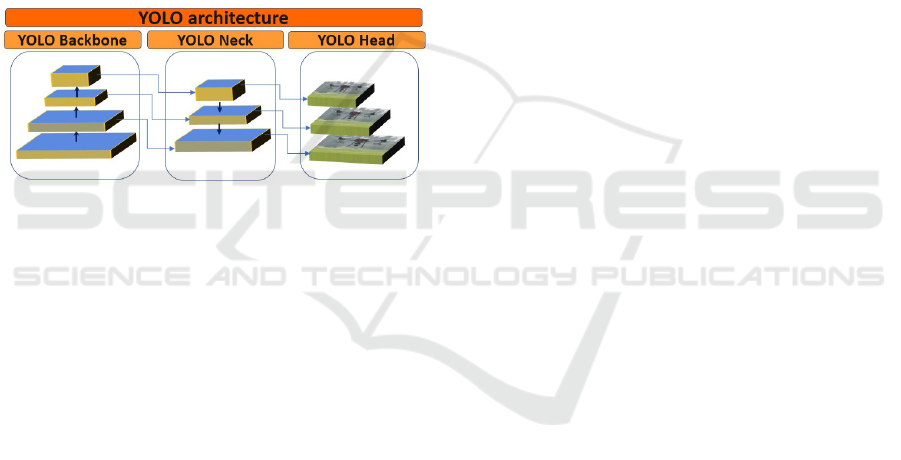
ture of YOLOv3(Redmon and Farhadi, 2018). As
shown in Figure 2, the YOLO series architecture is
divided into three functionally different parts, called
backbone network, neck network and head or de-
tect network (Bochkovskiy et al., 2020), (Yan et al.,
2021). This is a division found in the architecture
of many recent image detection models (Yao et al.,
2021):
Figure 2: Basic architecture of the YOLO series network
presented as Backbone, Neck and head.
The backbone is the ”body” of the network, which
will enable all the decisions made by the network. In
simple terms, it can be seen as a ”converter” that con-
verts the input image, a data format as such difficult
to process by AI (Artificial intelligence), into a set of
information that characterizes its content called ”fea-
tures” (such as the presence of shapes, colors, tex-
tures, ...) from which it is easy to recognize objects.
It is thus composed of a series of successive layers,
and extracts feature maps, i.e. maps indicating which
features are present at which locations in the image.
The backbone is usually trained separately on im-
age classification competitions such as the ImageNet
challenge (ImageNet, 2021), which include hundreds
of thousands of images with a wide range of content
such as animals, vehicles, plants, etc. This diversity
of content forces the backbone to learn a wide variety
of features in terms of size, color and shape of the el-
ements it observes and thus be more robust and able
to extract useful features regardless of the image pre-
sented to the backbone. The second part of Yolov5,
the neck, has the role of extracting the relevant fea-
tures from all the layers of the backbone, and combin-
ing them into useful features for our detection task.
Indeed, not all the layers included in the backbone
learn the same information: the first set of layers, gen-
erally of higher spatial resolution, will detect features
that are often simpler (the presence of lines, colors)
and smaller. The last set are the lower resolution lay-
ers that tend to provide more complex features (e.g.
the combination of specific shapes and colors such as
a metal circle with a hole for a car rim) and large ob-
jects. The neck makes it possible to integrate and
combine features of different resolutions and com-
plexities, to allow detection of small and large, simple
and complex features. Finally, the head is responsible
for the final decision of the network. Based on the in-
formation provided by the neck, it will detect the ele-
ments of interest by drawing bounding boxes around
them and it will, furthermore, give the nature of every
object present in each bounding box. In terms of gen-
eral architecture, Yolov5 is similar to its predecessors
Yolo and other models in the literature. It is there-
fore time to see the real reason for the difference in
performance. The ”bag of freebies” is a set of en-
hancements with no impact on the architecture of a
network, which can be used ”free of charge”, with
no cost of modification on an existing network. It
thus gathers all the improvements that apply during
the network learning such as: the loss function, data
augmentation, cross mini-batch normalization. The
”bag of specials” is, on the contrary, a bag containing
improvements that requiring specific modifications to
the architecture of a network. It contains recent ad-
vances in the scientific literature that improve the per-
formance of the network without decrease its speed.
3 THE IMPROVED YOLOv5
ALGORITHM
In order to implement an optical early warning mini-
UAV detection system, a flying target, which neces-
sarily has a small or even tiny appearance, must be
detected as much as possible. Thus, the size distant
mini-UAVs, in the sky background, is very small; and
the receptive field size of YOLOv5 is not enough to
detect these tiny flying objects. Hence the reason to
improve the architecture of YOLOv5. As shown in
Figure 3, there are two improvements to the original
YOLOv5 architecture: i) a fourth scale (marked with
yellow rectangle in Figure 3) is added to the three
scales of YOLOv5 feature maps to capture more tex-
ture and contour information of tiny mini-UAVs. ii)
feature maps from the backbone network are brought
into the added fourth scale (represented by the red
line) to reduce feature information loss of tiny mini-
UAVs.
The YOLOv5 final part consists of three detec-
An Improved YOLOv5 for Real-time Mini-UAV Detection in No Fly Zones
177
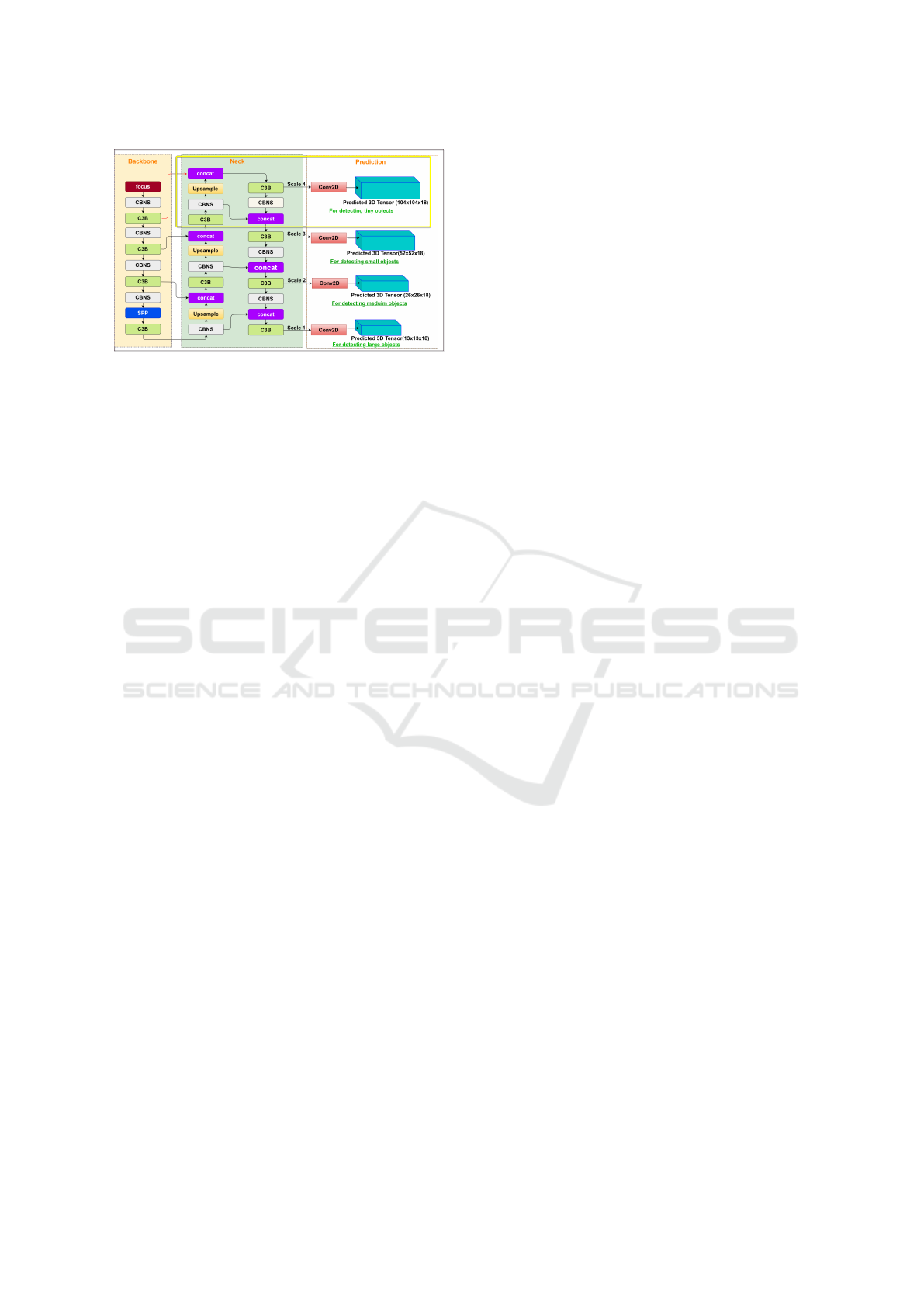
Figure 3: Anatomy of the improved YOLOv5 for mini-UAV
detection.
tion tensors. So, YOLOv5 applies 8,16, and 32
downsampling of the initial image to detect objects
at different resolutions. For example, the final out-
puts of YOLOV5 are three tensors of predictions
52x52x18,26x26x18 and 13x13x18 for an initial im-
age of resolution 416*416. In fact, the problem of
lacking appearance information is related to different
image resolutions. For example, if the image resolu-
tion is low, it may prevent the detector from detect-
ing very small objects. In these cases, the informa-
tion needed to detect very small objects will be very
limited. Indeed, in YOLOv5, if the object of inter-
est occupies a size of 8*8 pixels on an image with a
resolution of 416*416, then it will be represented by
only one pixel in the final feature maps. Therefore,
any object smaller than 8*8 will be disappeared. Sub-
sequently, this architecture of YOLOv5 is insufficient
for the detection of tiny objects. Therefore, the main
idea of our proposal is to add a detection level (scale
4 in Figure 3) with a high resolution that is able to ex-
tract more features for tiny objects. For this purpose,
we added a level that reduces the resolution only four
times. In fact, our proposed architecture aims to de-
tect tiny objects, which is why we have added a higher
resolution detection level (104*104). The addition of
the later consists of adding seven layers as indicated
in Figure 3 by yellow boxe, of which the upsample
layer increases the resolution and then the output of
this layer will be concatenated with the output of layer
three of the Backbone part. In addition, the connec-
tion represented by the red line is added to bring the
feature information from the backbone network into
the added fourth scale of the neck network. Based
on the idea of residual networks, this connection can
improve gradient backpropagation, to prevent the gra-
dient from being erased, and reduce the loss of the
feature information of very small flying objects.
4 EXPERIMENTAL RESULTS
AND EVALUATION
4.1 Custom Dataset Construction
Our custom dataset, called “mini-UAV dataset”,
was collected and constructed by us “the anti-drone
project team” for the HANNIBAL Air defense sys-
tem. This dataset is captured by a Dahua multisensor
Network PTZ camera (Dahua, 2021), in various com-
plex scenarios. We record various videos of several
UAV types flying in the air. In order to ensure the
diversity of data, UAVs, mainly including rotor mini-
UAV, like four-rotor UAV (i.e., DJI-Phantom4, DJI-
Marvic), and six-rotor UAV (i.e., DJI-Matrice 600,
DJI Agars T16) (DJI, 2021). The videos recorded in-
clude some useful attributes, e.g., Illumination Vari-
ation (IV), Weather Conditions (WC), and Diverse
Background (DB). In addition, the captured videos
are stored in an MP4 files with a frame rate of 25 FPS.
The frames, which have a resolution of 1920*1080,
are manually annotated with bounding boxes. Thus,
a total of 4560 sample images are used in this exper-
iment which are divided, randomly, into 3400 images
for training and 1160 images for testing purposes.
4.2 Experimental Setting
Experiments in this paper have been performed us-
ing the machine learning framework PyTorch 1.9. At
the beginning of our work, training tests were per-
formed, with 100 epochs, on the kaggle platform
with a GPU NVIDIA TESLA P100, 16 GB of mem-
ory, Driver version: 450.119.04, and CUDA version:
11.0. Then, hyperparameters evolution is performed
on a workstation with AMD Ryzen 9 5900X 12-Core
Processor 3.70 GHz, NVIDIA Geforce RTX 3070
AORUS MASTER (8GB memory) GPU, CUDA
11.1.0, cuDNN v8.2.2 and 64GB of memory. In our
work, the base scenario, of optimizing the hyperme-
ters that are shown in Figure 4, is trained during 100
of GPU hours. Afterwards, a final training operation
is performed using the hyperparameters generated by
the optimization algorithm (Wicaksono and Supianto,
2018), with an input image size of 640*640, and a
batch size on a GPU of 16 images.
Figure 4 shows optimization of some hyperpa-
rameters of YOLOv5, which has in total 30 of them.
4.3 Experimental Analysis
Table 1 shows mAP, precision, and recall of two mod-
els. It can be seen that, after 300 epochs, our method
has better performance. Compared with the results of
IMPROVE 2022 - 2nd International Conference on Image Processing and Vision Engineering
178

Figure 4: Hyperparameter optimization of the improved
YOLOv5.
the baseline, the precision of the improved YOLOv5
model is increased by 6.84% and the recall rate is in-
creased by 9.04%. Moreover, the mAP 0.5:0.95 is in-
creased by 40.57% and the mAP 0.5 has improved by
9.9%. These results confirm what was mentioned at
the beginning of this interpretation, that the accuracy
of our model is higher than that of the baseline.
Table 1: The model evaluation indicators for both the
improved-YOLOv5 and the Baseline models.
Performance metrics
detection
model
mAP 0.5
mAP
0.5:0.9
Precision Recall
Improved
YOLOv5
0.8606 0.9836 0.9804 0.9693
Beseline 0.4549 0.8846 0.912 0.8789
The loss function indicates the performance of a
given predictor in detecting the input data points in a
dataset. The smaller the loss, the better the detector
is at modeling the relationship between the input data
and the output targets. To evaluate our work, we have
used two different types of loss: the confidence loss
or objectness loss (L oss
ob j
) and the predicted bound-
ing box loss(Loss
box
). In other words, the box loss
represents how well the model can locate the cen-
ter of an object and how well the predicted bound-
ing box covers an object. While, the objectness loss
determine whether there are objects in the predicted
bounding box. Let’s mention that classification loss
(Loss
class
) is not used for the evaluation, since our
custom ”mini-UAV dataset” is composed of a single
class called ”mini-UAV”.Table 2 shows that after 300
epochs of training, our model has the lowest total loss
value, which makes it perform better than the baseline
model.
Table 2: The loss functions for both the imroved-YOLOv5
and the Baseline.
Loss function
detection
model
Loss
box
Loss
ob j
Loss
total
Improved
YOLOv5
0.01257 0.001986 0.014556
Baseline 0.02621 0.0007704 0.0269804
To highlight the performance of the improved
YOLOv5 detector, we compare it to the baseline.
The results of the test are based on 400 frames from
YouTube video sequences captured in outdoor envi-
ronment with different drone models, and from visi-
ble video clips shot with our Dahua multi-sensor cam-
era. So, an illustration of detected results of baseline
model and the improved YOLOv5 for some samples
in air images (i.e. ground to aerial perspective im-
ages) is shown in Figure 5.f where the red, and green
bounding boxes correspond to detections by the im-
proved YOLOv5 detector, and the baseline detector,
respectively.
Figure 5: Comparison between the original YOLOv5 (the
baseline) and the improved-YOLOv5 in aerial perspective
at diverse distances and with different visibility conditions.
For instance, in Figures 5.a and 5.b, we used two
frames of size 1920*1080 taken by our Dahua cam-
era, which contain each other a very far mini-drones.
Indeed, the improved YOLOv5 has detected the far
mini-drones with a confidence score higher than 0.76,
which is superior than that of the baseline (i.e., be-
tween 0.64 and 0.72). Accordingly, Figures 5.a and
5.b show that our model was efficient and outper-
formed the baseline in the detection of mini-UAV of
An Improved YOLOv5 for Real-time Mini-UAV Detection in No Fly Zones
179

tiny and small appearance. Furthermore, the results in
Figures 5.c and 5.d shows that the bounding boxes
of the improved YOLOv5 (red bounding boxes) are
more adjusted with the detected mini-UAVs. This
was consistent with the previous evaluation, and this
is shows that our method has the lowest box loss. Fi-
nally, the last Figures (lack of lighting for Figure 5.e
and fog phenomena for Figure 5.f) show that our
model performs well even under low visibility con-
ditions.
5 CONCLUSIONS
In this research, Deep learning technology was ap-
plied to tiny and very small flying object detection
in aerial perspective image (i.e., an image of a fly-
ing object on a sky background). And based on
YOLOv5 object detector(Ultralytics, 2021), a high-
precision mini-UAV detection model was proposed.
So, we firstly collected images of mini-UAVs in a
real environment, using our Dahua Thermal Network
PTZ Camera (Dahua, 2021). Most of them consist of
mini-UAVs flying in poor visibility conditions. Then,
we constructed a custom dataset designed by “mini-
UAV dataset”, which provides a benchmark to evalu-
ate the performance of the proposed detection model,
especially under low-visibility condition. As a result,
in order to reduce the total loss, we implemented a
mini-UAV detection model based on YOLOv5, which
has recently appeared. The proposed detector uses
features learned by a deep CNN to focus on very
small flying object detection in air image. This paper
mainly researches and develops drone related threats
under the requirement of real-time flying object detec-
tor. However, fast detection still needs specific hard-
ware configuration. In the future, we will continue
to optimize YOLOv5 especially by inputting a Small
Target Motion Detection-bsed model (STMD) (Wang
et al., 2021a) for early warning. At the same time, we
will attempt to deploy and integrate our model with a
flying object tracker such as DeepSORT (Wojke et al.,
2017), with the goal of establishing a monitoring sys-
tem in a No Fly Zone.
ACKNOWLEDGEMENTS
This work is financially supported by the Tunisian
Ministry of National Defense, Science and Technol-
ogy for Defense lab (STD), and Military Research
Center through an R&D project entitled: Develop-
ment of a Tactical System for Detection and Neutral-
ization of Mini-UAVs.
REFERENCES
Adibhatla, V., Chih, H.-C., Hsu, C.-C., Cheng, J., Abbod,
M., and Shieh, J.-S. (2021). Applying deep learn-
ing to defect detection in printed circuit boards via a
newest model of you-only-look-once. Mathematical
Biosciences and Engineering, 18:4411–4428.
Agarwal, S., Terrail, J. O. D., and Jurie, F. (2019). Recent
advances in object detection in the age of deep convo-
lutional neural networks.
Ahmed, K. R. and Kharel, S. (2021). Potholes detection
using deep learning and area estimation using image
processing.
Bochkovskiy, A., Wang, C., and Liao, H. M. (2020).
Yolov4: Optimal speed and accuracy of object detec-
tion. CoRR, abs/2004.10934.
COCO (2021). COCO, Common Object in Context.
Availbleonline:https://cocodataset.org/#home. (ac-
cessed on 17 September 2021).
Dahua (2021). Dahua Technology. Availableonline:https:
//www.dahuasecurity.com/products/All-Products/
Thermal-Cameras/Wizmind-Series/TPC-8-Series/
TPC-PT8621C. (accessed on 04 August 2021).
DJI (2021). MATRICE 600PRO SIMPLY PROFES-
SIONAL PERFORMANCE. Availableonline:https:
//www.dji.com/matrice600-pro/info. (accessed on 23
Mars 2021).
Doyle, D. (2013). Real-Time, Multiple, Pan/Tilt/Zoom,
Computer Vision Tracking, and 3D Position Esti-
mating System for Small Unmanned Aircraft System
Metrology. AIR UNIVERSITY, Wright-Patterson Air
Force Base, Ohio, USA.
Everingham, M., Eslami, S. M. A., Gool, L. V., Williams, C.
K. I., Winn, J. M., and Zisserman, A. (2014). The pas-
cal visual object classes challenge: A retrospective.
International Journal of Computer Vision, 111:98–
136.
Everingham, M., Gool, L. V., Williams, C. K. I., Winn,
J. M., and Zisserman, A. (2010). The pascal visual
object classes (voc) challenge. Int. J. Comput. Vis.,
88(2):303–338.
Fang, Y., Liao, B., Wang, X., Fang, J., Qi, J., Wu, R., Niu,
J., and Liu, W. (2021). You only look at one sequence:
Rethinking transformer in vision through object detec-
tion.
Ge, Z., Liu, S., Wang, F., Li, Z., and Sun, J. (2021).
YOLOX: exceeding YOLO series in 2021. CoRR,
abs/2107.08430.
He, K., Gkioxari, G., Doll
´
ar, P., and Girshick, R. (2017).
Mask r-cnn. In 2017 IEEE International Conference
on Computer Vision (ICCV), pages 2980–2988.
ImageNet (2021). Avaiableonline:https://www.image-net.
org/challenges/LSVRC/. (accessed on 15 June 2021).
Kim, D.-H. (2017). Evaluation of coco validation
2017 dataset with yolov3. Journal of Multi-
disciplinary Engineering Science and Technology
(JMEST)., 6:10356–10360.
Lin, T.-Y. and Maire, M. (2014). Microsoft coco: Common
objects in context. cite arxiv:1405.0312Comment.
IMPROVE 2022 - 2nd International Conference on Image Processing and Vision Engineering
180

Liu, W., Anguelov, D., Erhan, D., Szegedy, C., and Reed,
S. (2016). Ssd: Single shot multibox detector. In
Computer Vision – ECCV 2016, pages 21–37, Cham.
Springer International Publishing.
Lykou, G., Moustakas, D., and Gritzalis, D. (2020). De-
fending airports from uas: A survey on cyber-attacks
and counter-drone sensing technologies. Sensors,
20(12).
Maddalon, J., Hayhurst, K., Koppen, D., Upchurch, J., Mor-
ris, A., and Verstynen, H. (2013). Perspectives on un-
manned aircraft classification for civil airworthiness
standards nasa sti program. .. in profile.
Rahim, A., Maqbool, A., and Rana, T. (2021). Monitor-
ing social distancing under various low light condi-
tions with deep learning and a single motionless time
of flight camera. PLOS ONE, 16(2):1–19.
Redmon, J., Divvala, S., Girshick, R., and Farhadi, A.
(2016). You only look once: Unified, real-time ob-
ject detection. In 2016 IEEE Conference on Computer
Vision and Pattern Recognition (CVPR), pages 779–
788.
Redmon, J. and Farhadi, A. (2017). Yolo9000: Better,
faster, stronger. In 2017 IEEE Conference on Com-
puter Vision and Pattern Recognition (CVPR), pages
6517–6525.
Redmon, J. and Farhadi, A. (2018). YOLOv3: An Incre-
mental Improvement. arXiv.org, pages 1–6.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster
r-cnn: Towards real-time object detection with re-
gion proposal networks. In Cortes, C., Lawrence,
N., Lee, D., Sugiyama, M., and Garnett, R., editors,
Advances in Neural Information Processing Systems,
volume 28. Curran Associates, Inc.
Roboflow (2021). Availableonline:https://models.roboflow.
com/object-detection/yolov5. (accessed on 03 De-
cember 2021).
Seidaliyeva, U., Akhmetov, D., Ilipbayeva, L., and Matson,
E. T. (2020). Real-time and accurate drone detection
in a video with a static background. Sensors, 20(14).
Ultralytics (2021). Ultralytics YOLOv5 and Vision
AI. Availableonline:http://www.ultralytics.com. (ac-
cessed on 20 December 2021).
United States Air Force, W. (2009). Unmanned aircraft sys-
tems flight plan 2009-2047, technical report.
Wang, H., Zhao, J., Wang, H., Peng, J., and Yue, S. (2021a).
Attention and prediction guided motion detection for
low-contrast small moving targets.
Wang, X., Wei, J., Liu, Y., Li, J., Zhang, Z., Chen, J., and
Jiang, B. (2021b). Research on morphological detec-
tion of fr i and fr ii radio galaxies based on improved
yolov5. Universe, 7(7).
Wang, X., Xie, L., Dong, C., and Shan, Y. (2021c). Real-
esrgan: Training real-world blind super-resolution
with pure synthetic data.
Wang, Z., Wu, Y., Yang, L., Thirunavukarasu, Arjun an-
Wand Evison, C., and Zhao, Y. (2021d). Fast personal
protective equipment detection for real construction
sites using deep learning approaches. Sensors, 21(10).
Wicaksono, A. S. and Supianto, A. A. (2018). Hyper param-
eter optimization using genetic algorithm on machine
learning methods for online news popularity predic-
tion. International Journal of Advanced Computer
Science and Applications, 9(12).
Wojke, N., Bewley, A., and Paulus, D. (2017). Simple on-
line and realtime tracking with a deep association met-
ric. CoRR, abs/1703.07402.
Yan, B., Fan, P., Lei, X., Liu, Z., and Yang, F. (2021). A
real-time apple target21s detection method for pick-
ing robot based on improved yolov5. Remote Sensing,
13(9).
Yang, G., Feng, W., Jin, J., Lei, Q., Li, X., Gui, G., and
Wang, W. (2020). Face mask recognition system with
yolov5 based on image recognition. In 2020 IEEE 6th
International Conference on Computer and Commu-
nications (ICCC), pages 1398–1404.
Yao, J., Qi, J., Zhang, J., Shao, H., Yang, J., and Li, X.
(2021). A real-time detection algorithm for kiwifruit
defects based on yolov5. Electronics, 10(14).
An Improved YOLOv5 for Real-time Mini-UAV Detection in No Fly Zones
181
