
Energy Demand Prediction in Hybrid Electrical Vehicles for Speed
Optimization
Daniel Fink
1
, Sean Shugar
1
, Zygimantas Ziaukas
1
, Christoph Schweers
2
, Ahmed Trabelsi
2
and Hans-Georg Jacob
1
1
Leibniz University Hannover, Institute of Mechatronic Systems, An der Universit
¨
at 1, Garbsen, Germany
2
IAV GmbH, Berlin, Germany
Keywords:
Systems Modeling, Energy Demand Prediction.
Abstract:
Targeting a resource-efficient automotive traffic, modern driver assistance systems include speed optimization
algorithms to minimize the vehicle’s energy demand, based on predictive route data. Within these algorithms,
the required energy for upcoming operation points has to be determined. This paper presents a model-based
approach, to predict the energy demand of a parallel hybrid electrical vehicle, which is suitable to be used in
speed optimization algorithms. It relies on separate models for the individual power train components, and
is identified for a real test vehicle. On route sections of 5 to 7 km the averaged root mean square error for
the state of charge prediction results to 0.91 % while the required amount of fuel can be predicted with an
averaged root mean square error of 0.05 liters.
1 INTRODUCTION
A sustainable and resource-efficient mobility is a key
challenge in reducing global warming. Intending to
meet this demand, the development of vehicles with
the lowest possible energy consumption is targeted
by manufacturers. Besides physical influences, such
as driving resistances, power train system and en-
gine characteristics, the vehicle’s energy demand de-
pends significantly on the driver’s behavior (Radke,
2013). In this respect, increasing automation of the
vehicle control offers high potential to reduce the
energy demand. Therefore, considering the energy
demand within automated or assisted vehicle con-
trol algorithms is of particular importance to increase
the resource efficiency in automotive road transport
(Rosenzweig and Bartl, 2015).
Energy efficient driving automation is part of current
research (H
¨
ulsebusch, 2018). A common approach is
to plan and optimize a vehicle’s speed trajectory for
the upcoming route section. Usually, a dynamic pro-
gramming algorithm (Bellman, 2003) is used for the
the optimization process. In this process, an energy
model of a vehicle is called to determine the energy
requirements based on predictive route data. Within
such an optimization procedure, (Radke, 2013) uses
a prediction model for a combustion engine vehicle
to develop a driver assistance system for the vehi-
cle speed. Test drives indicate the fuel consump-
tion to be reduced by 10.2% when using this system.
(Freuer, 2016) demonstrates energy savings of up to
6% when optimizing the vehicle speed using an en-
ergy demand model for an electric vehicle. Applying
this approach within a risk-sensitive nonlinear model
predictive controller (Sajadi-Alamdari et al., 2020)
show that the energy efficiency of an electric vehicle
can be increased by 21%.
However, there is no investigation of other, more
complex drive concepts, such as parallel hybrid elec-
trical drives, to be used within a speed optimization
procedure described above. For these drives, litera-
ture provides many research works on energy man-
agement strategies (Zhang et al., 2020). Unfortu-
nately, these strategies are not suited to be applied
directly for any planning and optimizing approaches,
as they are usually based on adjusting the torque dis-
tribution. According to (H
¨
ulsebusch, 2018), this ad-
justment is not possible in every assistant system. In
addition, the proposed strategies are mostly based on
vehicle simulations and are not verified under real
conditions. An approach that aims to predict the en-
ergy demand of hybrid electrical vehicles with a se-
ries drive configuration is presented by (Fiori et al.,
2018). However, parallel drive configurations, which
are characterized by a complex torque distribution
mechanism, are not considered. Furthermore, (Pi-
116
Fink, D., Shugar, S., Ziaukas, Z., Schweers, C., Trabelsi, A. and Jacob, H.
Energy Demand Prediction in Hybrid Electrical Vehicles for Speed Optimization.
DOI: 10.5220/0011075600003191
In Proceedings of the 8th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2022), pages 116-123
ISBN: 978-989-758-573-9; ISSN: 2184-495X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

tanuwat et al., 2019) presents a hybrid vehicle energy
consumption model which only aims to determine the
consumed amount of fuel.
In this paper, we present a model based approach
to predict the energy demand of a hybrid electrical
vehicle with parallel working engines, based on route
data. This approach can be used within speed opti-
mization algorithms in driver assistance systems that
are not intended to be able to adjust the torque dis-
tribution. We build individual models for the single
power train components, such as combustion engine,
electric motor and battery as well as for the behav-
ior of the gearbox and the torque distribution control.
The model approaches are validated for a Volkswagen
Golf VII GTE using measured CAN data.
The paper is organized as follows. In section 2
we present the developed energy demand prediction
approach, introduce the separate models and demon-
strate the identification process. In section 3 the pre-
sented approach is validated. Finally our results are
concluded in section 4.
2 ENERGY DEMAND MODELING
Algorithms to optimize a speed trajectory often rely
on dividing the global optimization problem into
smaller sub-problems. Usually, the solution space is
discretized and the optimal speed is determined only
for the transition between two discrete route points.
Previous vehicle states can not be taken into account.
Hence, it is required that the energy demand can be
determined only relying on the information of two
operation points. Therefore, the input values for an
energy demand model, which is suitable for common
speed optimization algorithms, are limited to distance
Δ 𝑑
𝑘
between two discrete operating points, as well
as to the velocities 𝑣
𝑘
, 𝑣
𝑘−1
and the route data based
heights ℎ
𝑘
, ℎ
𝑘−1
at both points.
2.1 Model Structure
Using a longitudinal vehicle model, as described in
(Mitschke and Wallentowitz, 2004), the required drive
wheel torque 𝑇
w,𝑘
to transit from operation point 𝑘 −
1 to operation point 𝑘 can be calculated for a given
dynamic rolling radius 𝑟
d
as follows:
𝑇
w,𝑘
(𝛼
𝑘
, 𝑎
𝑘
, 𝑣
𝑘
) = 𝑟
d
·(𝐹
a,𝑘
+𝐹
r,𝑘
+𝐹
g,𝑘
+𝐹
i,𝑘
). (1)
The road slope 𝛼
𝑘
and the occurring acceleration 𝑎
𝑘
are derived from the input information, by:
𝛼
𝑘
= arctan
ℎ
𝑘
−ℎ
𝑘−1
Δ 𝑑
𝑘
, (2)
𝑎
𝑘
=
(𝑣
𝑘
−𝑣
𝑘−1
)
2
+2 ·𝑣
𝑘−1
·(𝑣
𝑘
−𝑣
𝑘−1
)
2 ·Δ 𝑑
𝑘
. (3)
Furthermore, 𝑣
𝑘
represents the average speed within
the transition between the operation points. The driv-
ing resistance forces, such as the aerodynamic drag
force 𝐹
a,𝑘
, the gradient force 𝐹
g,𝑘
, the rolling resis-
tance force 𝐹
r,𝑘
and the inertia force 𝐹
i,𝑘
can be de-
termined, based on the defined input information and
known vehicle parameters, as follows:
𝐹
a,𝑘
=
1
2
𝜌 ·𝑐
d
· 𝐴
f
·𝑣
2
𝑘
, (4)
𝐹
g,𝑘
= 𝑚
v
·𝑔 ·sin 𝛼
𝑘
, (5)
𝐹
r,𝑘
= 𝑐
r
·𝑚
v
·𝑔 ·cos 𝛼
𝑘
, (6)
𝐹
i,𝑘
= 𝑚
v
·𝑒
r
·𝑎
𝑘
. (7)
Here, 𝜌 is the density of air, 𝑐
d
the aerodynamic drag
coefficient, 𝐴
f
the vehicle frontal area, 𝑔 the gravita-
tional acceleration, 𝑚
v
the vehicle mass, 𝑐
r
the rolling
resistance coefficient, and 𝑒
r
an additional factor to
consider rotational masses.
In parallel hybrid electrical power trains, the
torque, applied by the two individual engines, cannot
be derived from the required wheel torque directly.
This torque additionally relies on the behavior of two
preconnected components. First, the gearbox which
Torque requirements
Transmission
Torque distribution
CEEM
Battery
Energy demand
𝑇
w,𝑘
𝑖
t,𝑘
𝑇
CM,𝑘
𝑇
EM,𝑘
𝐼
EM,𝑘
𝑈
EM,𝑘
𝑠
c,𝑘
¯𝑣
𝑘
𝑣
𝑘
, 𝑣
𝑘−1
Δ 𝑑
𝑘
ℎ
𝑘
, ℎ
𝑘−1
𝑇
Br,𝑘
𝑠
c,𝑘−1
Figure 1: Structure of the prediction approach.
Energy Demand Prediction in Hybrid Electrical Vehicles for Speed Optimization
117

determines the transmission ratio between wheel axle
and output shaft of the engines. Second, the torque
distribution control which determines the part of to-
tal drive torque the single engines are required to ap-
ply. The behavior of these components depend on var-
ious unpredictable factors, such as the engine temper-
ature. Due to the limited input information within a
speed optimization procedure, these components can-
not be modeled in detail. However, their behavior
must be taken into account when predicting the partic-
ular torque and thus the energy demand of the individ-
ual drives. For this reason, we present an estimation
approach for both, transmission ratio and torque dis-
tribution before modeling the electric motor and the
combustion engine. The structure of our overall ap-
proach to predict the energy demand is demonstrated
in figure 1.
2.1.1 Transmission Estimation
The gear selection within the gearbox mainly depends
on the drive shaft speed and the torque to be transmit-
ted. As the these values are unknown at this stage
of the energy demand model (see figure 1), we aim
to estimate a transmission factor 𝑖
t,𝑘
based on vehicle
speed 𝑣
𝑘
and wheel torque 𝑇
w,𝑘
. Therefore, accord-
ing to (Nelles, 2001), we declare 𝑖
t,𝑘
for an operation
point 𝑘 to be a linear combination of weighted basis
functions, as follows:
𝑖
t,𝑘
(𝑇
w,𝑘
, 𝑣
𝑘
) =
𝑀
t
Õ
𝑖=1
𝑁
t
Õ
𝑗=1
𝑤
t,𝑖, 𝑗
Φ
𝑖
(𝑇
w,𝑘
, 𝜉
𝑖
)Φ
𝑗
(𝑣
𝑘
, 𝜂
𝑗
). (8)
A basis function Φ
𝑞
(𝑢, 𝒄) for the input 𝑢 and a set
of grid points 𝒄 is defined to be a linear function that
equals 1 at a grid point 𝑐
𝑞
while it is 0 at the neighbor-
ing 𝑐
𝑞−1
and 𝑐
𝑞+1
and all other grid points, as declared
by:
Φ
𝑞
(𝑢, 𝒄) =
𝑢−𝑐
𝑖−1
𝑐
𝑖
−𝑐
𝑖−1
, if 𝑐
𝑖−1
≤ 𝑢 ≤ 𝑐
𝑖
𝑢−𝑐
𝑖+1
𝑐
𝑖
−𝑐
𝑖+1
, if 𝑐
𝑖
< 𝑢 ≤ 𝑐
𝑖+1
0, otherwise.
(9)
In order to determine the weights 𝑤
t,𝑖, 𝑗
in equation
(8) and thus, to identify the transmission behavior of
our test vehicle, we define 𝑀
t
= 23 grid points 𝜉
𝑖
for
the drive wheel torque 𝑇
w
and 𝑁
t
= 21 grid points 𝜂
𝑗
for the vehicle speed 𝑣.
We measure standard CAN data of the test vehi-
cle in drive sequences of 5 to 7km and create a data
set of 525 km in total which consists of 𝐿 = 293, 512
measured operating points for the drive shaft speed
𝑛
∗
d
, the vehicle speed 𝑣
∗
, the total power train torque
𝑇
∗
t
, the electric motor torque 𝑇
∗
EM
, the electric motor
current 𝐼
∗
EM
, the electric motor voltage 𝑈
∗
EM
, the bat-
tery current 𝐼
∗
B
, the battery voltage 𝑈
∗
B
and the bat-
tery’s state of charge (SOC) 𝑠
∗
c
. Based on this data,
the drive wheel torque can be calculated using equa-
tion (1) and the actual transmission factor 𝑖
∗
t,𝑘
for a
single data point 𝑘 can be approximated by
𝑖
∗
t,𝑘
=
𝑛
∗
d,𝑘
𝑛
w,𝑘
=
2 ·𝜋 ·𝑟
d
·𝑛
∗
d,𝑘
60 ·𝑣
∗
𝑘
. (10)
Taking this transmission factor for given data points, a
least square algorithm, as described in (Nelles, 2001),
is used to determine a optimal set of weights 𝒘
t,opt
by
𝒘
t,opt
= argmin
𝒘
1
𝐿
𝐿
Õ
𝑘=1
(𝑖
t,𝑘
−𝑖
∗
t,𝑘
)
2
, (11)
for an identification data set containing about 83% of
the driving sequences in the data set.
2.1.2 Torque Distribution
Using the estimated transmission factor, the required
total drive or breaking torque 𝑇
t
can be derived from
the wheel torque. The total drive torque is applied
either by a single or by a combination of two power
train components such as electric motor, combustion
engine and braking system. In order to estimate how
the different components are addressed, we introduce
a torque distribution estimation approach. We define
this estimation to cover all procedures of distributing
the required drive torque to the individual drives.
The components to be addressed differ for the
states driving or decelerating. In driving state, the re-
quired torque is applied through the electric motor,
the combustion engine or by a combination of both.
In case of decelerating or braking the required torque
is a combination of the electric motor’s recuperative
torque and a braking torque at the wheels. For this
reason, we consider the states driving and decelerat-
ing separately.
Decelerating State. As the recuperating ability is
limited, the required torque can be applied only to a
certain extend by the electric motor when decelerat-
ing. The remaining part of the required deceleration
torque must be applied through the braking system. In
order to model this behavior, the method described in
section 2.1.1 is used. At deceleration states the elec-
tric motor’s recuperative torque 𝑇
EM,𝑘
(𝑇
t,𝑘
, 𝑠
c,𝑘
) is as-
sumed to rely on the total required torque 𝑇
t,𝑘
, as well
as on the battery’s SOC 𝑠
c,𝑘
:
𝑇
EM,𝑘
(𝑇
t,𝑘
, 𝑠
c,𝑘
) =
𝑀
EM
Õ
𝑖=1
𝑁
EM
Õ
𝑗=1
𝑤
EM,𝑖, 𝑗
Φ
𝑖
(𝑇
t,𝑘
, 𝜉
𝑖
)Φ
𝑗
(𝑠
c,𝑘
, 𝜂
𝑗
) (12)
VEHITS 2022 - 8th International Conference on Vehicle Technology and Intelligent Transport Systems
118

We define 𝑀
EM
= 7 grid points for the total torque and
𝑁
EM
= 7 grid points for the SOC to determine a set of
weight for the recuperation torque estimation at de-
celeration stages. We use the identification data set,
as described in section 2.1.1, to find an optimal set
of weights according to equation (11). However, only
data points at deceleration states (𝑇
t,𝑘
< 0) are used
for the identification. While the identification data al-
ready contains a measured SOC value for every single
operating point, it is unknown at this stage of the pre-
diction approach. Compared to other vehicle states,
the SOC can be assumed to change significantly less
dynamically. Therefore, the previous SOC 𝑠
c,𝑘−1
is
used for the recuperation torque estimation. As the
braking torque dissipates from the system, it is not
further considered for the energy demand prediction.
Driving State. At driving state, the torque distribu-
tion mainly depends on the required total drive torque
and the vehicle speed. In addition, we assume that the
total required drive torque is always fully distributed
between electric motor and combustion engine. This
allows to define 𝑟
𝑘
as a distribution ratio between
electric motor torque 𝑇
EM,𝑘
and combustion engine
torque 𝑇
CE,𝑘
by:
𝑟
𝑘
=
𝑇
CE,𝑘
𝑇
t,𝑘
=
𝑇
CE,𝑘
𝑇
CE,𝑘
+𝑇
EM,𝑘
. (13)
In order to determine the torque distribution behavior
at driving states, we declare
𝑟
𝑘
(𝑇
t,𝑘
, 𝑣
𝑘
) =
𝑀
r
Õ
𝑖=1
𝑁
r
Õ
𝑗=1
𝑤
r,𝑖, 𝑗
Φ
𝑖
(𝑇
t,𝑘
, 𝜉
𝑖
)Φ
𝑗
(𝑣
𝑘
, 𝜂
𝑗
), (14)
and define 𝑀
r
= 11 grid points for the total torque and
𝑁
r
= 8 grid points for the vehicle speed. We use the
identification data set as described in section 2.1.1. As
the torque distribution is additionally affected by the
SOC, we determine separate optimal weight sets for
five different SOC-ranges.
2.2 Electric Power Train
Electric Motor. To model the energy demand of the
electric part of the power train, we derive the motor’s
mechanical power 𝑃
m,EM, 𝑘
from its torque 𝑇
EM,𝑘
and
rotational drive shaft speed 𝑛
d,𝑘
, according to (Binder,
2018), as follows:
𝑃
m,EM, 𝑘
= 2𝜋 ·𝑇
EM,𝑘
·𝑛
d,𝑘
, (15)
where 𝑛
d,𝑘
results from equation (10). In contrast to
the gearbox and the torque distribution, characteristic
diagrams are usually available for the vehicle’s drives.
The energy demand of the electric motor depends on
it’s electrical power 𝑃
el,EM, 𝑘
, which is represented by
the sum of mechanical power 𝑃
m,EM, 𝑘
and the power
loss 𝑃
l,𝑘
:
𝑃
el,EM, 𝑘
= 𝑃
m,EM, 𝑘
+𝑃
l,𝑘
. (16)
The power loss 𝑃
l,𝑘
can be obtained by the interpo-
lation of a characteristic diagram for given values of
the rotational drive shaft speed 𝑛
d,𝑘
, the motor torque
𝑇
EM,𝑘
and the voltage 𝑈
EM,𝑘
that is applied to the mo-
tor. In order to determine the motor voltage at this
stage of the prediction approach, we assume 𝑈
EM,𝑘
to
be a bi-quadratic function of the SOC 𝑠
c,𝑘−1
and the
motor torque 𝑇
EM,𝑘
as follows:
𝑈
EM,𝑘
(𝑠
c,𝑘−1
,𝑇
EM,𝑘
) = 𝑝
𝑈
EM
,1
+ 𝑝
𝑈
EM
,2
·𝑠
2
c,𝑘−1
+ 𝑝
𝑈
EM
,3
·𝑠
c,𝑘−1
+ 𝑝
𝑈
EM
,4
·𝑇
2
EM,𝑘
+ 𝑝
𝑈
EM
,5
·𝑇
EM,𝑘
.
(17)
Using a least square algorithm, we find an error min-
imizing parameter set 𝒑
𝑈
EM
based on measured mo-
tor voltage values within the identification data, de-
scribed in section 2.1.1. Having an approximation of
the motor voltage, according to (Binder, 2018), the
motor current can be derived from the electrical power
as follows:
𝐼
EM,𝑘
=
𝑃
el,EM, 𝑘
√
3 ·𝑈
EM,𝑘
· 𝑝
𝐼
EM
. (18)
As the power factor 𝑝
𝐼
EM
(also known as cos 𝜙) is un-
known for the electrical motor of our test vehicle, it
is identified, using a least square algorithm based on
measured motor current values within the identifica-
tion data described in section 2.1.1.
Battery. Finally, we model the battery of the elec-
tric power train. According to (Elgowainy, 2021) the
amount of energy 𝐸
B,𝑘
, that is extracted from or sup-
plied to the battery, can be determined by:
𝐸
B,𝑘
= 𝑈
B,𝑘
·𝐼
B,𝑘
·Δ 𝑡
𝑘
. (19)
While the time interval Δ 𝑡
𝑘
between two operation
points can be derived from the input values Δ 𝑑
𝑘
and
𝑣
𝑘
, the battery’s voltage 𝑈
B,𝑘
and its current 𝐼
B,𝑘
are unknown. However, the current at the battery
mainly depends on the motor current. We describe
this dependence by defining a second order polyno-
mial function:
𝐼
B,𝑘
= 𝑝
𝐼
B,1
·𝐼
2
B,𝑘
+ 𝑝
𝐼
B,2
·𝐼
B,𝑘
+ 𝑝
𝐼
B,3
, (20)
in which an optimal parameter set 𝒑
𝐼
B
is to be found,
by using a least square algorithm, based on measured
battery current values within the identification data
set, as described in section 2.1.1. Depending on the
battery current 𝐼
B,𝑘
and the motor voltage we define
the battery voltage 𝑈
B,𝑘
by
𝑈
B,𝑘
= 𝑈
EM,𝑘
+ 𝑝
𝑈
B
·𝐼
B,𝑘
, (21)
Energy Demand Prediction in Hybrid Electrical Vehicles for Speed Optimization
119

and find the parameter 𝑝
𝑈
B
also by using a least
square algorithm, based on measured battery voltage
values within the identification data set. To determine
the resulting SOC 𝑠
c,𝑘
, at the current operation point
𝑘, we relate 𝐸
B,𝑘
to the total effective energy content
of the battery 𝐸
t,eff
and add it to the SOC of the pre-
vious operation point 𝑠
c,𝑘−1
as follows:
𝑠
c,𝑘
= 𝑠
c,𝑘−1
+
𝑈
B,𝑘
·𝐼
B,𝑘
·Δ 𝑡
𝑘
𝐸
t,eff
. (22)
2.3 Combustion Engine
For a combustion engine the fuel rate
¤
𝑄
g,𝑘
for an op-
eration point 𝑘 can usually be derived from a char-
acteristic diagram which is specified by the manufac-
turer. In order to derive the correlating energy demand
𝐸
CM,𝑘
from this consumption and thus to combine it
with the energy demand of the electric power train
part 𝐸
B,𝑘
, the heating value of gasoline 𝐻
g
is used as
follows:
𝐸
CM,𝑘
=
¤
𝑄
g,𝑘
·Δ 𝑡
𝑘
·𝐻
g
, (23)
where Δ𝑡
𝑘
represents the past time between operation
point 𝑘 −1 and 𝑘.
3 VALIDATION RESULTS
Using the prediction approach presented in section 2
the energy demand of both engines can be determined
based on route data and velocity values. To validate
this approach, the data set described in section 2.1.1
is split into 6 parts. For an evaluation of the predic-
tion accuracy we perform a 6-fold cross validation, in
which 6 times 5 different data set parts are used for
the identification procedure, while the remaining part
is preserved for validation.
The required elevation profiles for the validation
drive sequences are obtained by using a HERE rout-
ing API (HERE Maps, 2021) on the sequences’ GPS
values. Based on the measured vehicle speed 𝑣
∗
, and
the obtained elevation ℎ
∗
, the energy demand is deter-
mined separately for each validation drive sequence
using the presented approach. Thereby, only the first
measured SOC value of a drive sequence is used,
while hereafter the prediction approach relies on SOC
values predicted in previous steps. Thus, the remain-
ing SOC measurements are only used for evaluation
purposes. In order to asses the prediction accuracy,
a root mean square error is determined between pre-
dicted and measured values. This error value is cal-
culated for each of the 6 different validation data sets
within the 6-fold cross validation procedure and than
averaged.
In addition, the prediction behavior of the single
power train component models is evaluated and visu-
alized on a data set independent test drive sequence, to
analyze the error propagation through the prediction
approach. For this purpose, figure 2 shows the vehicle
speed and the elevation profile for the first kilometer
of the test drive sequence.
0 200 400 600 800 1000
0
50
100
35
40
45
Figure 2: Vehicle speed and elevation profile.
Based on this input data, the transmission factor is
predicted, as described in section 2.1.1, and compared
to the actual transmission factor, which is calculated
from the measured power train speed and the vehicle
speed, according to equation (10). While figure 3 il-
lustrates this comparison for the test drive sequence,
the averaged root mean square error results to 0.407
for the 6-fold cross validation on the entire data set.
The transmission factor’s value range of our test ve-
hicle extends from 2.44 for the sixth gear to 13.76 for
the first gear. The predicted transmission factor values
𝑖
t
show a reasonable fit for the test drive. However, the
gearbox-related staged transmission behavior, during
the dynamic acceleration stage, can only be predicted
approximately.
0 200 400 600 800 1000
4
6
8
Figure 3: Transmission factor prediction and measurement.
In order to illustrate the effect of the predicted
transmission factor, figure 4 shows the 𝑖
t
-based pre-
diction of the total power train torque 𝑇
t
, compared to
the actual measured value 𝑇
∗
t
. The comparison shows
that even in areas where the transmission factor is not
fitting properly, such as between 100 m and 200m, the
total torque prediction proves an adequate behavior.
However, an occurring peak of high torque at 65m
is not met after a short interruption in the accelera-
tion procedure (see figure 2). The averaged root mean
square error on the validation data results to 27.19 Nm
in a value range for the total torque from −220 Nm to
VEHITS 2022 - 8th International Conference on Vehicle Technology and Intelligent Transport Systems
120
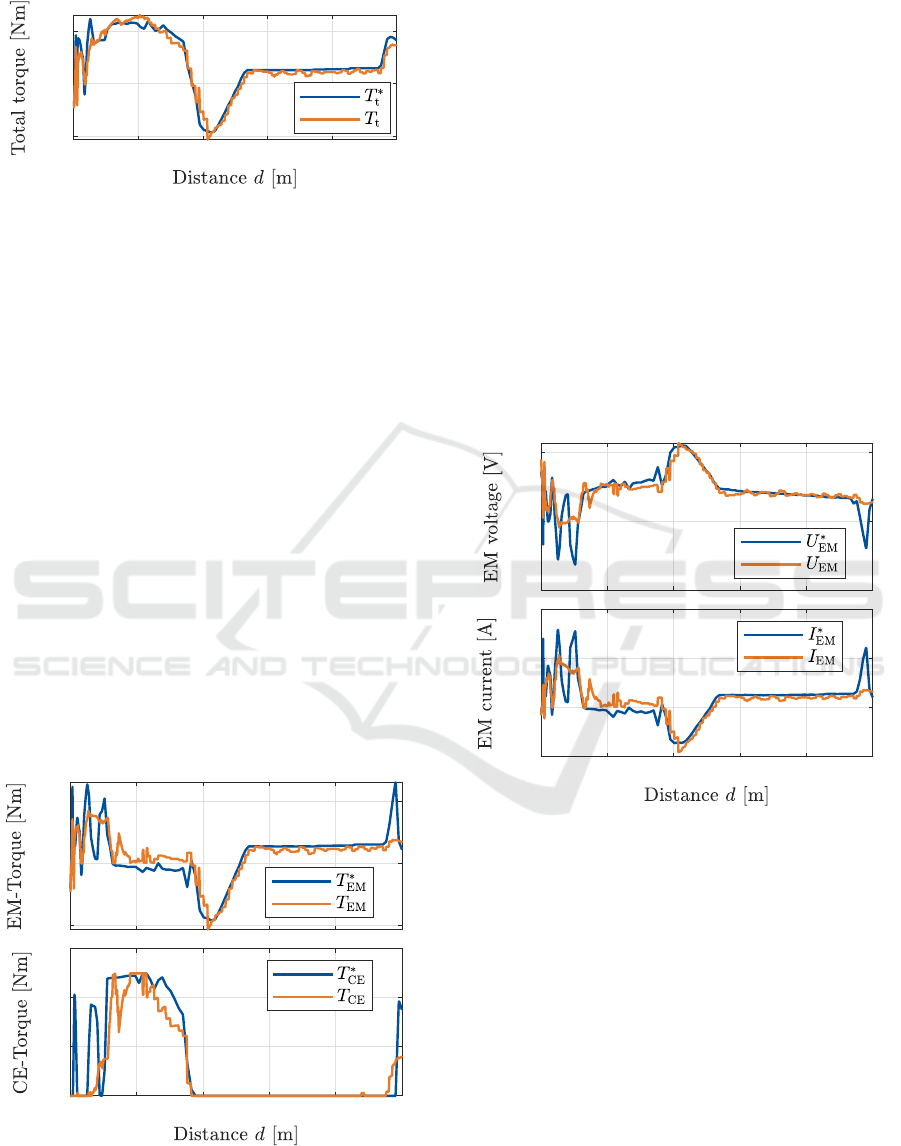
250Nm.
0 200 400 600 800 1000
-200
0
200
Figure 4: Total torque prediction and measurement.
The torque distribution, relying on 𝑇
t
, is evalu-
ated by comparing each engine’s torque, calculated
by using the predicted distribution ratio 𝑟 according
to equation (13), with measured engine torque values.
The 6-fold cross validation on the total data set leads
to an averaged root mean square error of 23.11Nm
for the electric motor torque and 17.33 Nm for the
combustion engine torque. Figure 5 shows the pre-
dicted combustion engine torque 𝑇
CE
as well as the
predicted torque of the electric motor 𝑇
EM
compared
to the measured values 𝑇
∗
CE
and 𝑇
∗
EM
for the test drive
sequence. Both predictions illustrate a reasonable fit.
However, there are two areas to be pointed out. First,
the early peaks of the measured combustion engine
torque, at 20 m and at 70 m, are not met. Here, the
engine was switched on shorty, which could not be
predicted. This mismatch can be traced to the incor-
rect total torque determination in this areas (see figure
4). Second, in the area from 140 m to 180 m the torque
distribution is also inaccurate. It can be seen that the
torque is predicted to be applied by a combination of
both engines, while the measured values indicate that
the combustion engine drives the vehicle all by itself.
-200
0
200
0 200 400 600 800 1000
0
100
200
300
Figure 5: Prediction and measurement of engine torques.
The partly higher errors in predicting the torque
distributions are probably caused by the simplifica-
tion of assuming that the procedure of distributing
the required drive torque is only depending on SOC
and vehicle speed. Actually, this task is performed
by a complex control algorithm that relies an many
additional internal power train states, such as engine
temperature. Furthermore, the distributing behavior is
not only depending on the current operation point, but
also on previous states. Thus, even if the current oper-
ation point indicates, that the torque can be applied by
the electric motor only, the combustion engine might
be still supporting. This can be due to higher torque
requests in previous operation points and a delayed
shutdown behavior. However, this and other influ-
ences can not be considered in the torque distribution
model, as the purpose of the prediction approach is
to be applied within optimization algorithms. These
algorithms neither propagate previous states nor de-
tailed internal power train values.
340
360
380
0 200 400 600 800 1000
-100
0
100
200
Figure 6: Prediction and measurement of current and volt-
age at the electric motor.
Based on the electric motor torque, the prediction
of the electric motor’s current and voltage are eval-
uated. Figure 6 shows the predicted motor current
𝐼
EM
and the voltage 𝑈
EM
where the propagation of
the torque prediction errors are evidently reflected.
The voltage root mean square error results to 2.93 V,
in a value range of 320 V to 400 V. The root mean
square error for the motor current is determined as
16.83A, for occurring values between −100 A and
200A. However, these error dimensions are caused
by the preceding errors in predicting the motor torque
values. When validating the motor voltage and cur-
rent prediction based on measured torque values 𝑇
∗
EM
,
the root mean square errors can be found as 1.74 A for
the motor current and 1.69V for the motor voltage.
Energy Demand Prediction in Hybrid Electrical Vehicles for Speed Optimization
121
-200
-100
0
100
0 200 400 600 800 1000
360
370
380
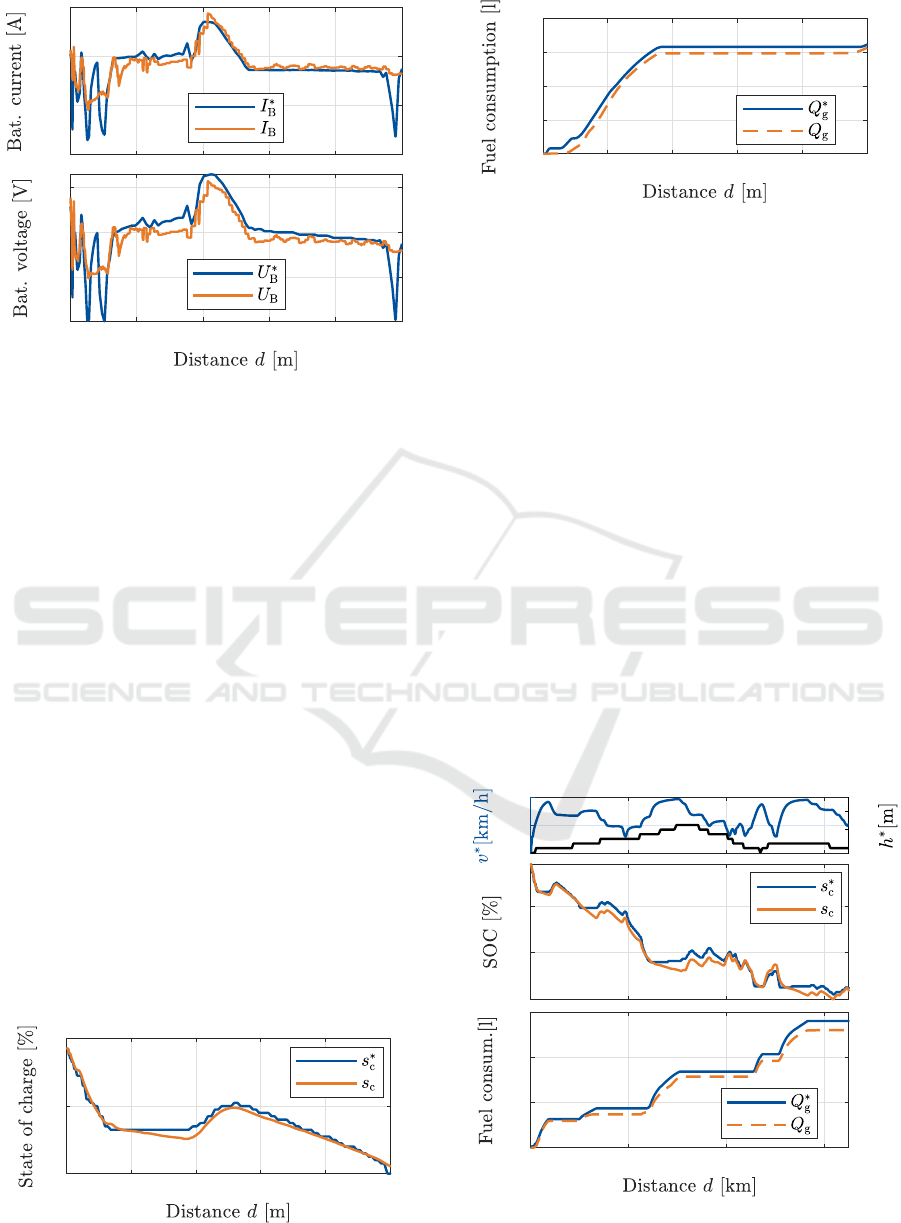
Figure 7: Prediction and measurement of current and volt-
age at the battery.
A similar dependence on prediction errors for the
electric motor torque is indicated by the two predicted
battery states current 𝐼
B
and voltage 𝑈
B
in figure 7.
Here, a root mean square error of 16.75A is deter-
mined for the battery current while this value equals
2.7A when validating the prediction based on mea-
sured electric motor torque values 𝑇
∗
EM
. For the bat-
tery voltage a root mean square error is found to equal
3.13V on a predicted electric motor torque and results
to 0.99V for measured torque values.
Finally, the prediction of the required SOC is eval-
uated. For this purpose, the SOC 𝑠
c
is determined,
based on previously predicted states of the electri-
cal power train, as described in section 2.2. Figure
8 shows the comparison of 𝑠
c
with measured values
𝑠
∗
c
for the selected test drive sequence. It is indicated
that the preceding inaccuracies, in particular for the
torque peaks mentioned above, are not affecting the
SOC prediction too much. The predicted values 𝑠
c
indicate a reasonable fit. However, deviating torque
predictions, persisting over a longer distance, are re-
flected in the SOC prediction, as the area between
200m and 400 m shows. Within the validation proce-
dure the root mean square error for the SOC predic-
tion is found to equal 0.91%. A validation of the SOC
0 200 400 600 800 1000
80
81
82
Figure 8: State of charge prediction and measurement.
0 200 400 600 800 1000
0
0.02
0.04
0.06
0.08
Figure 9: Prediction and measurement of the required
amount of fuel.
prediction, based on measured electric motor torque
values, leads to a root mean square error of 0.84 %.
Regarding the combustion engine part of the
power train, the prediction of the required amount of
fuel is validated. Figure 9 shows the comparison of
the predicted 𝑄
g
and the measured fuel consumption
𝑄
∗
g
for the test drive sequence. Here, the impact of
the not predicted combustion engine torque peaks at
20m and 70m (cf. figure 5) forms out. The measured
values increase sharply, due to the engine’s switch-
on process, which usually requires a relatively high
amount of fuel, compared to its normal operation.
This results in a remaining gap between the predicted
and the measured fuel consumption. The torque de-
viations in the areas 140 m to 180 m and 260 m to
350m are less effecting the consumption prediction,
as for the corresponding operating points the specific
fuel requirements do not differ as much. The valida-
tion procedure leads to a root mean square error of
0.05liters when relying on the predicted torque distri-
bution, while this error value equals 0.02 liters based
on combustion engine torque measurements.
0
50
100
40
60
80
76
78
80
0 2 4 6
0
0.1
0.2
Figure 10: SOC and fuel prediction for the entire test drive
sequence compared to measurements.
VEHITS 2022 - 8th International Conference on Vehicle Technology and Intelligent Transport Systems
122

In order to outline the behavior of the prediction
approach over a longer distance, figure 10 illustrates
the SOC and fuel consumption prediction for the en-
tire test drive sequence of 6.5 km.
4 CONCLUSION
In this paper, an approach is presented to predict the
energy demand of a hybrid electrical vehicle, based
on route data and speed values. The approach is build
to be suitable for an application within optimization
algorithms, as it only relies on input data for a single
transition between two operation points. The predic-
tion procedure is composted by a series of individual
models that represent the behavior of the single power
train components and can be described as follows.
For given speed and elevation values in two con-
secutive route points, the required drive torque at the
wheels is calculated using a longitudinal vehicle dy-
namic model. Further, a gearbox model is build and
identified to estimate the transmission behavior, based
on the wheel torque and vehicle speed. In order to de-
termine which part of the required total drive torque
will be applied by the individual drives, a model is
build to estimate a torque distribution ratio, based on
the total drive torque, the vehicle speed and the pre-
vious state of charge. Having the separate torque val-
ues, the combustion engine’s required amount of fuel
can be derived from a characteristic diagram. For the
electric part of the power train, the current and the
voltage are estimated and used within a battery model
to determine the required electric energy.
A data set of 525 driven kilometers is created to
identify and validate the prediction approach on a
Volkswagen Golf VII GTE. Using drive sequences of
5 to 7km within a 6-fold cross validation procedure,
an averaged root mean square error of 0.91 % can be
determined for the prediction of the state of charge.
Regarding the prediction of the amount of fuel re-
quired by the combustion engine, this error value re-
sults to 0.05 liter. The main part of prediction inaccu-
racies can be attributed to the estimation of the single
torques, to be applied by the individual engines. In
dynamic driving situation, in which both engines are
required, the estimation approach is not always capa-
ble to predict the correct distribution of the required
total drive torque. This might be approved by a more
complex model or by including the current accelera-
tion, when estimating the torque distribution. In ad-
dition, future work will investigate data-driven meth-
ods, such as neural networks, for their ability of esti-
mating the energy demand. Other advantages can be
assumed in involving more than one previous opera-
tion point, if they are given within the target applica-
tion of the prediction approach.
REFERENCES
Bellman, R. E. (2003). Dynamic programming. Dover Pub-
lications, Mineola, N.Y.
Binder, A. (2018). Elektrische Maschinen und Antriebe:
Grundlagen, Betriebsverhalten. Springer Berlin Hei-
delberg, Berlin, Heidelberg, 2. aufl. 2017 edition.
Elgowainy, A., editor (2021). Electric, Hybrid, and Fuel
Cell Vehicles. Springer eBook Collection. Springer
New York and Imprint Springer, New York, NY, 1st
ed. 2021 edition.
Fiori, C., Ahn, K., and Rakha, H. A. (2018). Micro-
scopic series plug-in hybrid electric vehicle energy
consumption model: Model development and valida-
tion. Transportation Research Part D: Transport and
Environment, 63:175–185.
Freuer, A. (2016). Ein Assistenzsystem f
¨
ur die en-
ergetisch optimierte L
¨
angsf
¨
uhrung eines Elektro-
fahrzeugs. Springer Fachmedien Wiesbaden, Wies-
baden.
HERE Maps (2021). https://www.here.com/platform. (last
viewed 03/11/2022).
H
¨
ulsebusch, D. (2018). Fahrerassistenzsysteme zur en-
ergieeffizienten L
¨
angsregelung - Analyse und Opti-
mierung der Fahrsicherheit. PhD thesis, Karlsruher
Institut f
¨
ur Technologie.
Mitschke, M. and Wallentowitz, H., editors (2004). Dy-
namik der Kraftfahrzeuge. VDI-Buch. Springer
Berlin Heidelberg, Berlin, Heidelberg and s.l., vierte,
neubearbeitete auflage edition.
Nelles, O. (2001). Nonlinear System Identification: From
Classical Approaches to Neural Networks and Fuzzy
Models. Springer eBook Collection. Springer, Berlin
and Heidelberg.
Pitanuwat, S., Aoki, H., IIzuka, S., and Morikawa, T.
(2019). Development of hybrid vehicle energy con-
sumption model for transportation applications—part
ii: Traction force-speed based energy consumption
modeling. World Electric Vehicle Journal, 10(2):22.
Radke, T. (2013). Energieoptimale L
¨
angsf
¨
uhrung
von Kraftfahrzeugen durch Einsatz vorausschauen-
der Fahrstrategien. Karlsruher Schriftenreihe
Fahrzeugsystemtechnik. KIT Scientific Publishing.
Rosenzweig, J. and Bartl, M. (2015). A review and analysis
of literature on autonomous driving. The Making of
Innovation, pages 1–57.
Sajadi-Alamdari, S. A., Voos, H., and Darouach, M. (2020).
Ecological advanced driver assistance system for opti-
mal energy management in electric vehicles. IEEE In-
telligent Transportation Systems Magazine, pages 92–
109.
Zhang, F., Wang, L., Coskun, S., Pang, H., Cui, Y., and Xi,
J. (2020). Energy management strategies for hybrid
electric vehicles: Review, classification, comparison,
and outlook. Energies, 13(13):3352.
Energy Demand Prediction in Hybrid Electrical Vehicles for Speed Optimization
123
