
A Platform to Interest Young People in STEM using Robotics and AI
in a Playful Way
Fabian Gibert and Georg J. Schneider
a
Department of Computing, Trier University of Applied Sciences, Schneidershof, Trier, Germany
Keywords: e-Learning Hardware and Software, Children's Education using Computer Support and K12 Students,
Robotics.
Abstract: This paper describes an educational and affordable robotics design of hardware and software for a technical
platform for playful learning in STEM fields, providing a low entrance barrier and a smooth transition from
playing to developing, depending on the user’s age. The platform is installed in a toy car and operates the
vehicle motors. A smartphone app serves as remote control. In addition to the simple basic electrotechnical
structure for driving, which is comprehensible to users, the design can be extended with actuators or sensors
via standardized modules and interfaces. On the software side, experimentation possibilities arise to process
captured sensor values or to experiment with an AI-supported image recognition, allowing users to get an
insight into up-to-date discussions like AI-based image recognition int the context of autonomous driving. In
addition, the system offers smartphone app functions, such as an image display on the smartphone or
automated vehicle behavior. Manufacturer-independent and without proprietary specifications, this platform
opens up a flexible, expandable technical basis for playfully exploring the interaction of components in one's
own interest without prior knowledge or programming experience.
1 INTRODUCTION
Mathematics, computer science, natural sciences,
technology - almost no area of life today is not
influenced by the disciplines summarized in the
acronym “STEM”. It is becoming increasingly
important for future generations since this field is not
only in high demand from the labor market, but it also
affects our daily life. Knowledge in these areas is
essential for a country to be attractive as business
location. (U.S. department of education 2022) states:
“In an ever-changing, increasingly complex world,
it's more important than ever that our nation's youth
are prepared to bring knowledge and skills to solve
problems, make sense of information, and know how
to gather and evaluate evidence to make decisions.
These are the kinds of skills that students develop in
science, technology, engineering, and math,
including computer science—disciplines collectively
known as STEM/CS.“ Interesting young people in
technology should already start at an early age. Hence
an age-appropriate approach is needed and thus a
playful and experimental method must be provided to
gain experience. (Chatzopoulos et al., 2021) show in
a
https://orcid.org/0000-0001-7194-2394
their study with 10-11 years old students that the
integration of educational robots has a positive impact
on students’ acquisition of scientific concepts.
However the available platforms are rather childish or
expensive, when it comes to custom extensions for
individual projects (cf. section 2).
This paper presents the development of an open,
low-cost and modular technical platform that enables
an introduction in the field with low entry barriers.
The system shall spike the interest in current topics
such as robotics and AI through a playful approach.
Children and young people are thus given access to
explore modes of action and perspectives with a
platform that costs a total of 75€.
Toys always depict contemporary topics and
translate the world for young people into their world
of experience. The approach is quite different.
Accordingly, the approach presented here is one such
translation and deliberately represents a foundation of
interwoven different elements, much as the term
STEM suggests a scientific interweaving of multiple
directions.
Exemplary use of the platform in our example is
as a technology module for operating toy vehicles and
346
Gibert, F. and Schneider, G.
A Platform to Interest Young People in STEM using Robotics and AI in a Playful Way.
DOI: 10.5220/0011084900003182
In Proceedings of the 14th International Conference on Computer Supported Education (CSEDU 2022) - Volume 1, pages 346-352
ISBN: 978-989-758-562-3; ISSN: 2184-5026
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

robots. The realization as a multifunctional vehicle is
contemporary and introduces users to new aspects of
digitized mobility in a playful way. Especially a
modern user interface via a smartphone makes the
platform attractive to young adults and children. The
AI-based image recognition reflects the current
discussion about autonomous driving and gives a
glimpse of the challenges to the user. Especially it is
possible to train or replace this module. In a further
step, the platform can also be improved with
additional sensors and hence can learn to process
these inputs as well.
We see the platform as a teaser for children and
adolescents to start playing with a toy car using a
modern smartphone user interface, which reminds
users on race car games where they can tilt and yaw
the phone to control the car. Even young children
from 5 years on can start using the car as a simple toy.
Additionally, the vehicle provides several newly
features, as displaying the video image on the smart
phone but also recognizing images and reacting upon
them. Hence a broad spectrum of use cases is
available with a low entrance barrier into the field. It
starts from simple playing with the car over
exchanging parts of hard- and software provided by
more experienced users, which targets older children
from possibly 10 years upwards until developing
custom enhancements with hardware and/or software
components. This would be targeted to children of 13
years and older as well as adults.
2 RELATED WORK
The idea of a playful approach is not new, neither is
the teaching and explaining intention of systems to
make STEM topics tangible. Example from
university systems and commercial platforms will be
discussed in more detail in a further section.
As a general overview, (Sapounidis & Alimisis,
2020) give a good description of the current state of
the use of robots in education for young children.
2.1 Related Research
The PiBot system is a low-cost robotic platform with
camera for STEM education (Vega & Cañas, 2018).
The system has the same target group as our system.
The PiBot bases on a Raspberry Pie 3 controller with
sensors attached. The robot is rather targeted to
operate autonomously in a delimited environment,
whereas we want to emphasize the toy character by
providing a remote control on a smartphone.
Additionally, we want to integrate an AI component,
which is a hot topic today to showcase and
experiment with the capabilities of this technology, in
our case image recognition.
(Wang et al., 2019) describe a toy car with remote
control and image recognition. However, their system
strongly relates to the application domain.
Possibilities to user the car as an experimental kit for
technology acquisition is not intended.
(Chatzopoulos et. Al., 2020) present a low cost
robotic platform for building a robot with wheels
integrating sensors and actuators. They also integrate
a visual programming platform. In contrast to our
approach the robot is targeted to their educational
context. The robot does not look like a “real” car and
it does not integrate a camera and image recognition
using AI tools.
2.2 Related Commercial Systems
Lego has set itself the goal of “playful introduction to
STEM” (LEGO Group, 2021a) and offers solutions in
the form of the Lego Mindstorms series. However,
hardware and software are not technically freely
extensible or open-source based, so that applicability
and learning possibilities are always tied to the
manufacturer and the resources provided. As a
consequence, expensive components (LEGO Group,
2021b) also pose a significant financial threshold for
users. Despite the implementation of an independent
project on "PixyCam" (PixyCam, 2021), which takes
Lego compatibility into account, no Lego-supported
camera is available because the manufacturer does
not push this even after years.
The company DJI pursues a similar goal and offers
a learning robot as an “all-in-one solution” for
experimenting and programming called “DJI
RoboMaster Lernroboter” (DJI, 2021). This
comprehensive approach is provided for workshops
and learning processes though and addresses users with
training requirements. The resulting high costs as well
as the professional intentions and perspectives.
Therefore, they also form entry barriers for younger
people who are the target group of our system.
The need for programming and high prices keep
many potential young interested parties away from
corresponding offerings.
Our goal is that the educational approach we
follow, i.e. playful interaction as a starting point for
acquiring STEM knowledge and competencies need
not be limited to a small interested group of users.
Other children and young people can and should also
discover STEM content in a playful way. This work
demonstrates that it is possible to experience
comparable functionality without such high hurdles.
A Platform to Interest Young People in STEM using Robotics and AI in a Playful Way
347
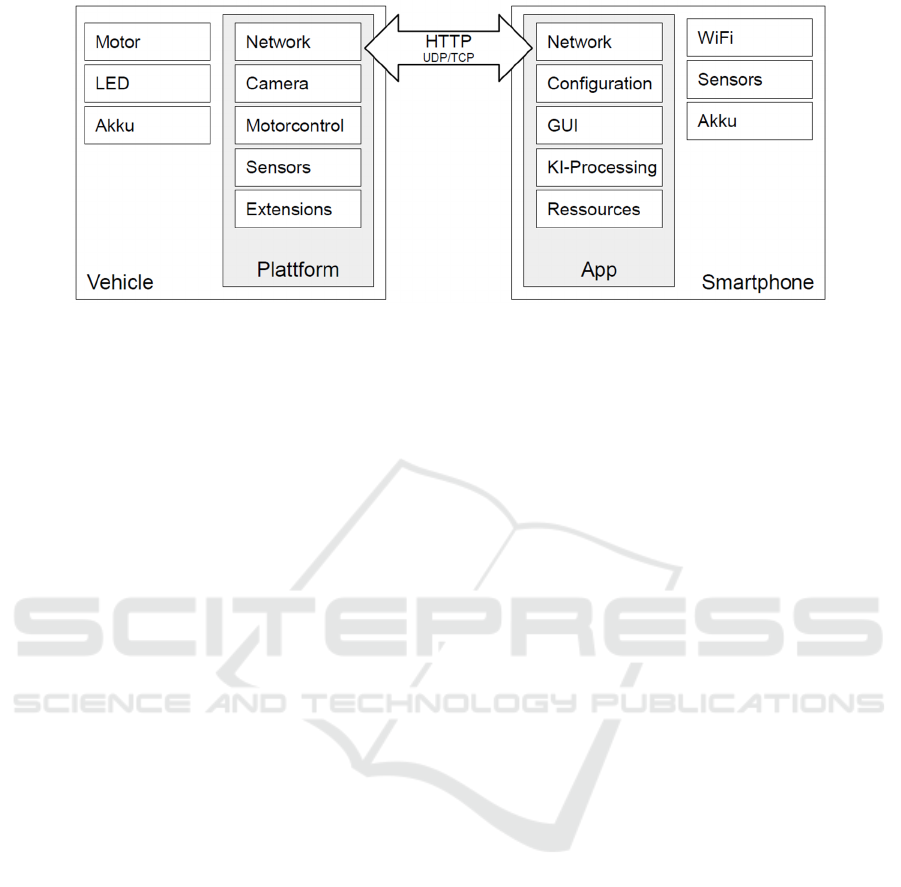
Figure 1: System Architecture.
3 TECHNICAL CONCEPT
The solution presented can be conceptually divided
into two parts (see fig. 1). First, the platform consists
of hardware and software, which in the case of the
vehicle application is mounted directly on the vehicle
and provides connection and operation of sensors and
actuators. Second, a user interface is necessary for
interacting with the vehicle. The GUI is realized as an
Android app running on an off the shelf smartphone.
The smartphone, in turn, provides computational
capacity to implement, besides the GUI, an AI
component and provides further functionalities, such
as sensors, which can be used as additional input for
the GUI.
For the purpose of independence and scalability,
on the one hand a WiFi connection is used between
the platform and the app, whereby both are directly
connected and do not require any further network
technology or configuration like a WLAN router or
such. On the other hand, communication takes place
via the standardized HTTP, TCP and UDP protocols.
The images from the integrated camera as well as
sensor values are sent from the platform to the app
and displayed in the GUI. The app in turn sends
control or configuration commands to the platform.
This client/server architecture does not require an
internet connection. The network concept is not
Android or even smartphone specific and therefore
allows other input devices as clients.
The use of a microcontroller as the platform's
computing unit offers the option to connect and
operate different sensors and actuators. With a focus
on typical voltage levels and standardized electronic
components, the control concept allows additional
components to be used as actuators via a simple
connection. Bus interfaces enable several parallel
peripheral devices such as sensors. All hardware is
battery-powered, equivalent to conventional remote-
controlled vehicle models, which makes the vehicle
exchangeable too.
The GUI is designed as a remote control for
steering the vehicle with buttons for steering and
acceleration. Additional functions can be activated in
a menu. Likewise, parameters for operation can be
selected to individually configure the platform, i.e.
the car.
Through software modules that process data from
the hardware, a wide range of applications can be
developed. Some exemplary applications are already
implemented. As an example, the automatic
switching on of the lights is realized as soon as the
calibratable light sensor detects low brightness.
Furthermore, the automatic stopping of the vehicle is
implemented, as soon as the AI-based image analysis
detects a “Stop” sign that the vehicle is approaching.
Other models can be dynamically integrated into
the application. Depending on the training domain,
numerous other scenarios can be implemented as well
and users are able to explore either the use of AI-
components or the integration of a special behavior of
the car in a playful manner.
4 IMPLEMENTATION
The platform consists of a base of hardware
components. The microcontroller is programmed in
C++. It manages the access point, the communication
to the app and the control of the connected periphery
depending on the commands.
The Java app, designed according to MVP,
includes parts for communication, data processing,
graphical display for control, and image processing
CSEDU 2022 - 14th International Conference on Computer Supported Education
348

Figure 2: Java snippet for Tensorflow Integration.
through a machine learning model. This approach is
described in more detail in the next section.
Furthermore, the concept supports a modular and
extensible operation of the system to new applications
and offers the user new insights in the belonging
technologies.
4.1 Machine Learning in Android
The computing capacity of the smartphone allows the
use of a model trained on street signs
("SSDMobileNet"), the framework Tensorflow
(Tensorflow (Google LLC), 2022) realizes its offline
integration into the Java application, as fig. 2 shows
to some extent. The figure also shows the few simple
steps that must be performed within the program code
in order to perform this integration. A Tensorflow
interpreter instantiated with the model from the
resource folders receives the camera image for image
processing. This image was preprocessed for resizing
and transformed into a TensorImage. On this
database, the detection method, which allows
multiple detections per image, fills a hashmap with
the result data set. This is then evaluated and contains,
among other data, the location of the detection in the
image, the designation (“classes”) of the detected
object and a probability value (similarity of the
current image object to the training object). The
source code can be extended accordingly to integrate
further models. Hence there is a possibility for users
to experiment with AI-technology and have hands on
training and first-hand experiences. We believe that
this is very attractive for young people since the use
of AI in supported or autonomous driving is
constantly discussed in the media. As an additional
benefit, users get to know the limitations and
challenges using such a technology.
4.2 Modularization and Extensibility
In order to address the spectrum of problems that
MINT poses, the platform is modularly expandable in
various respects and therefore flexibly designed.
On the hardware side, the ESP32 microcontroller
(Espressif Systems, 2021) is extended by an expander
IC to provide more connection pins. It addresses, for
example, the motor control, an H-bridge to control the
DC motors. The expander IC also offers connection
pins for LEDs, for example to realize the front light
of the vehicle. But not only outputs but also inputs
can be defined to receive data. According to this
extension principle via analogue pins and level
control or via defined digital interfaces like SPI and
I2C, the platform can be extended by various sensors
and actuators. Fig. 3 shows an example of a circuit for
the SPI interface. The interfaces are inexpensive,
open source and often multilingual tutorials are
available. Therefore, they are used as key components
of our platform.
Figure 3: Example of multiple SPI slave devices to one
master device (SparkFun Electronics, 2022).
On the software side, the hardware extensions
described above, already result in numerous
possibilities that can be installed and activated in
order to extend the system. In addition, the app also
offers expansion potential, e.g. in adding further
graphical user interface elements. Parameterization is
already provided in the menu to configure the
behavior of the AI evaluation, user feedback such as
visual feedback or vibration alert, configuration of the
vehicle's steering, image compression, etc. according
to current usage intent. Accordingly, additional menu
items and functionalities can also be added.
Beyond the individual hardware and software
features, there are completely new ways in which
these enhancements can be used: by combining both
areas as well as adding further software modules for
A Platform to Interest Young People in STEM using Robotics and AI in a Playful Way
349

data processing such as the exemplary stop automatic,
the users can find their own paths and explore the
system playfully.
Figure 4: App usage to control the car via sensor.
Fig. 4 shows the app usage on the smartphone,
whose sensor detects the rotation and controls the
steering of the vehicle in the background. The live
image of the camera is visible in the center of the
smartphone.
5 CONCLUSIONS AND FUTURE
WORK
First, the results of this work will be summarized and
then discussed, and their further development will be
highlighted.
5.1 Conclusion
The technical platform, which finds concrete
application in the work as a modularly changeable
model car, is designed to be simple yet flexible and
thus expandable. It comprises a microprocessor, a
camera module, actuators and sensors and thus a
system of parameterizable input and output options.
Both the AI-based evaluation of camera images and
the programmable interaction of sensors and
hardware allow for the intended freedom of design
and experimentation. The technology is based on
available standard components.
This solution eliminates special, expensive
components or the need for users to individually write
software to make the system work. Especially
important for further extensions is that there are no
proprietary parts or vendor dependencies.
Based on this platform, we have realized a
modular architecture which opens new possibilities
for young users to discover and test digitalization and
mobility while playing and experimenting. They can
gain numerous insights from the STEM world within
their own horizon of knowledge and possibly
extending the horizon step by step. Having in mind
the different approaches or steps mentioned in the
beginning, the platform offers from simple playing
for younger children (5 years and older) over
changing preconfigured parts of hardware or software
modules for older children (10 years and older),
when the maturity and interest in the vehicle
hopefully grows to adolescents (13 and older), which
are even more advanced in their skills and want to
program the vehicle on their own or add completely
new behavior.
Experiences can not only be made only on the
positive possibilities of our technical environment,
but also the ambiguities and faults and its
recognizable limits, such as those of artificial
intelligence, which will be explained in greater detail
in the next section. Here, we see an interesting
starting point for older children and adults to gain
more insights into the field of artificial intelligence,
in our case image recognition in the context of
autonomous driving. Since this topic is discussed in
the media intensively nowadays, we se a potential
high interest to get experiences and more profound
knowledge in this field.
In contrast to the related systems presented in this
paper, this platform therefore offers young people a
low entrance barrier in the robotics and/or AI field. A
playful and independent way of getting started and
finding their way around has been created.
5.2 Future Work
The system has been initially developed having the
needs of a child of about 13 years in mind. The
potential user has been interviewed and integrated in
the development process as good as possible in the
period of the current travel and contact restrictions.
Further evaluation must be done in the future. Since
we target three different scenarios from “playing”
over “exchanging of parts” to “customizing the
vehicle” and additionally a forth possibly orthogonal
scenario, which relates to getting to know the AI we
have to develop different, partially long-running tests
in order to find out, if our hypotheses hold that there
car stipulates the interest in the underlying concepts
of the “toy” and leads to getting into the teams STEM
and AI.
The technical solution achieved can be further
developed on various levels. For example, better
images are possible with a higher-quality camera,
which, in addition to visualization, also optimizes
the connected image processing. Thus, more
CSEDU 2022 - 14th International Conference on Computer Supported Education
350

Figure 5: Correct interpretation ”Stop” Sign colors display red (left) and misinterpretation of ”Stop”sign as ”Do not enter“
(right).
sophisticated visual evaluation can be realized, but
also errors in detection can be reduced. Depending
on the environmental situation and the visual quality
of the replicated road signs in the example of the
vehicle application, the “Stop” sign was not correctly
detected in 100% of the cases, and the automatic stop
of the vehicle was therefore not always executed (see
fig. 5 and fig. 6).
These rare misinterpretations were caused, among
other things, by a too large distance to the object,
visual similarities between two signs, or resolution
limits of the camera images. Other objects in the
immediate environment however rarely interfered
with the correct recognition of the traffic signs. For
gaming purposes these success rates are probably
sufficient. Furthermore, misinterpretations are real
existing phenomena when dealing with the
corresponding technology. Their occurrence in the
scenario is thus quite an expected representation of
the real world and should not be interpreted
exclusively as a fault or shortcoming of this solution.
In accordance with the numerous possible
variants of use of the platform, possible technical
compositions of the system must be built up in the
future and examined for any errors and
incompatibilities. Existing functions must be
optimized, and additional modules should be
included.
Further automatic functions beneath the presented
“Stop” function using AI-based image recognition
and the automatic light switching by the brightness
sensor can be added as well in order to provide an
ever-richer stock of settings with which young users
can research. These examples are plausible reactions
within the domain and display an exemplarily
implementation of such a behavior.
Equally helpful for user acceptance can be a
visualization of the components involved or the
technical conditions and limitations. Complementary
explanations of STEM aspects in the app can also
accompany or suggest a setup.
In addition to various interchangeable,
compatible machine learning models, Tensorflow,
among others, also provides training of models for
new domains and custom data with tools and
guidance. In this direction, the platform benefits from
the option to integrate the seemingly limitless
possibilities of AI usage into the app via the
framework.
A next extension can be a multi-user operation. If
currently only a single user can act with his
smartphone per platform, several users are
conceivable in the future, who complement or
challenge each other playfully.
The example of the vehicle application illustrates
that more than one participating platform can be used
as a technical module. For example, two vehicles
could also be designed with the goal of reacting to
each other based only on their technical capabilities.
In the area of GUI design, new requirements arise
as more components and scenarios are realized. As a
consequence, an almost completely configurable
design with visual elements and functions is
conceivable, which considers or simplifies as many
use cases as possible.
REFERENCES
Chatzopoulos, A., Kalogiannakis, M., Papadakis, S.,
Papoutsidakis, M., Elza, D., & Psycharis, S. (2021).
DuBot: An Open Source, Low Cost Robot for STEM
and Educational Robotics, in: Handbook of Research
on Using Educational Robotics to Facilitate Student
Learning (pp. 441 - 465), IGI Global
Chatzopoulos, A., Papoutsidakis, M., Kalogiannakis, M. &
Psycharis, S. (2020) Innovative Robot for Educational
Robotics and STEM, Intelligent Tutoring Systems, in:
International Conference on Intelligent Tutoring
Systems (ITS 2020), Springer International Publishing,
(pp. 95-104)
DJI, Product site (2021) „Robomaster EP Core“,
https://www.dji.com/de/robomaster-ep-core, download
12/3/2021
A Platform to Interest Young People in STEM using Robotics and AI in a Playful Way
351

Espressif Systems, (2021), Espressif Modules „ESP32-S
Series“, https://www.espressif.com/en/products/modu
les, 2021, download 11/3/2021
LEGO Group (2021a) „Lego Interessen: Lernen MINT mit
Lego Spielzeugen“, https://www.lego.com/de-de/
categories/stem, download 11/20/2021
LEGO Group (2021b) „Lego Home: Mindstorms EV3“,
https://www.lego.com/de-de/product/ev3-intelligent-
brick-45500, download 11/20/2021
PixyCam, (2021) „Introducing Pixy2 for Lego Mindstorms
EV3“, https://pixycam.com/pixy2-lego/, download
5/17/2021
Santos, R. (2019) „ESP32 I2C Communication“,
https://randomnerdtutorials.com/esp32-i2c-communica
tion-arduino-ide/, download 1/26/2022
Sapounidis, T. & Alimisis, Dimitris. (2020), Educational
robotics for STEM: A review of technologies and some
educational considerations, in: Science and
Mathematics Education for 21st Century Citizens:
Challenges and Ways Forward (pp.167-190), Nova
science publishers: Hauppauge, NY, USA,
SparkFun Electronics, (2022), „Serial Peripheral Interface
(SPI)“, https://learn.sparkfun.com/tutorials/serial-
peripheral-interface-spi/all, download 1/26/2022
Tensorflow (Google LLC) (2022), „Why TensorFlow“,
https://www.tensorflow.org/about?hl=en, download
1/26/2022
U.S. department of education (2022) download 1/27/2022
https://www.ed.gov/stem
Vega, J. & Cañas, J. M. (2018), PiBot: An Open Low-Cost
Robotic Platform with Camera for STEM
Education in: Electronics 2018, 7(12), 430;
https://doi.org/10.3390/electronics7120430
Wang, P, Tian, J, Niu, H, & Chen, Y. (2019) "Smart
Agricultural In-Field Service Robot: From Toy to
Tool." Volume 9: 15th IEEE/ASME International
Conference on Mechatronic and Embedded Systems
and Applications. Anaheim, California, USA.
August 18–21, 2019. V009T12A050. ASME.
https://doi.org/10.1115/DETC2019-97497
CSEDU 2022 - 14th International Conference on Computer Supported Education
352
