
Towards a Scenario Database from Recorded Driving Data
with Regular Expressions for Scenario Detection
Philip Elspas
1
, Jonas Lindner
1
, Mathis Brosowsky
1
, Johannes Bach
1
and Eric Sax
2
1
Dr. Ing. h.c. F. Porsche AG, Weissach, Germany
2
Karlsruhe Institute of Technology, Karlsruhe, Germany
Keywords:
Scenario Database, Scenario Detection, Automated Driving, Data-driven Development.
Abstract:
With increasing capabilities of Advanced Driver Assistance Systems (ADAS) and Automated Driving Systems
(ADS) established automotive development processes are challenged. The specification phase faces an open
world problem, with an exploding space of different driving situations and various corner cases. Scenario-
based development provides a systematic approach to describe the operational design domain of ADAS and
ADS with scenarios, that can be used along the development process until system qualification. However,
deriving all relevant scenarios, that need to be considered remains an open challenge. Recorded driving data
provides a valuable source of real-world scenarios with highest validity. A database with such scenarios can be
used to validate requirements early in the specification phase. For system qualification, detected scenarios can
be extended with test conditions or can be (re-)simulated. Furthermore, function development can leverage
a scenario database for data-driven and machine learning methods. While a scenario database is a common
concept most approaches remain abstract and vague in the description. In this work we analyze requirements
and expectations on a scenarios database and propose a detailed design and concept. For the necessary scenario
detection, we suggest a new method to identify complex pattern in multivariate time series based on regular
expressions.
1 INTRODUCTION
Safety is a major concern in the automotive indus-
try. As system failures can cause accidents or even
fatalities, comprehensive testing should ensure a high
level of safety. Therefore the Automotive Software
Process Improvement and Capability Determination
(Automotive SPICE) provides a process reference and
assessment model for the development of automotive
systems (VDA QMC Working Group 13 / Automotive
SIG, 2017). The top level of the V-model requires a
system requirement analysis on the left side, which
is opposed by system qualification tests on the right
side. Both, specified requirements and system qual-
ification tests, must be linked in a traceable way. In
other words: Each test case must be assigned to a re-
quirement and each requirement must be verified with
according tests.
With the open-world problem of highly automated
driving the specification of system requirements be-
comes increasingly challenging due to the large num-
ber of possible driving situations. Scenario-based
development addresses the issue by breaking down
the overall driving task into scenarios. Then the
proper driving behavior can be specified, developed
and tested on a scenario level. The entirety of tested
scenarios should cover the Operational Design Do-
main (ODD) and provide evidence for the systems
safety.
In a survey on scenario-based safety assessment
for automated vehicles Riedmaier et al. distinguish
between a knowledege-based scenario generation and
data-driven extraction of scenarios from driving data
(Riedmaier et al., 2020). Different levels of ab-
straction and detail can be distinguished (Menzel
et al., 2018): Functional scenarios provide a hu-
man understandable description, logical scenarios in-
clude parameter ranges and finally concrete scenarios
are instances of logical scenarios. A major goal of
knowledge-based approaches is the consistent usage
of scenarios along those levels of abstraction. Men-
zel et al. suggest a key-word based approach to detail
functional to logical scenarios (Menzel et al., 2019).
Beyond the use of key-words, Bock et al. describe a
domain specific language that supports consistent us-
age of functional, logical and concrete scenarios for
400
Elspas, P., Lindner, J., Brosowsky, M., Bach, J. and Sax, E.
Towards a Scenario Database from Recorded Driving Data with Regular Expressions for Scenario Detection.
DOI: 10.5220/0011085200003191
In Proceedings of the 8th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2022), pages 400-409
ISBN: 978-989-758-573-9; ISSN: 2184-495X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
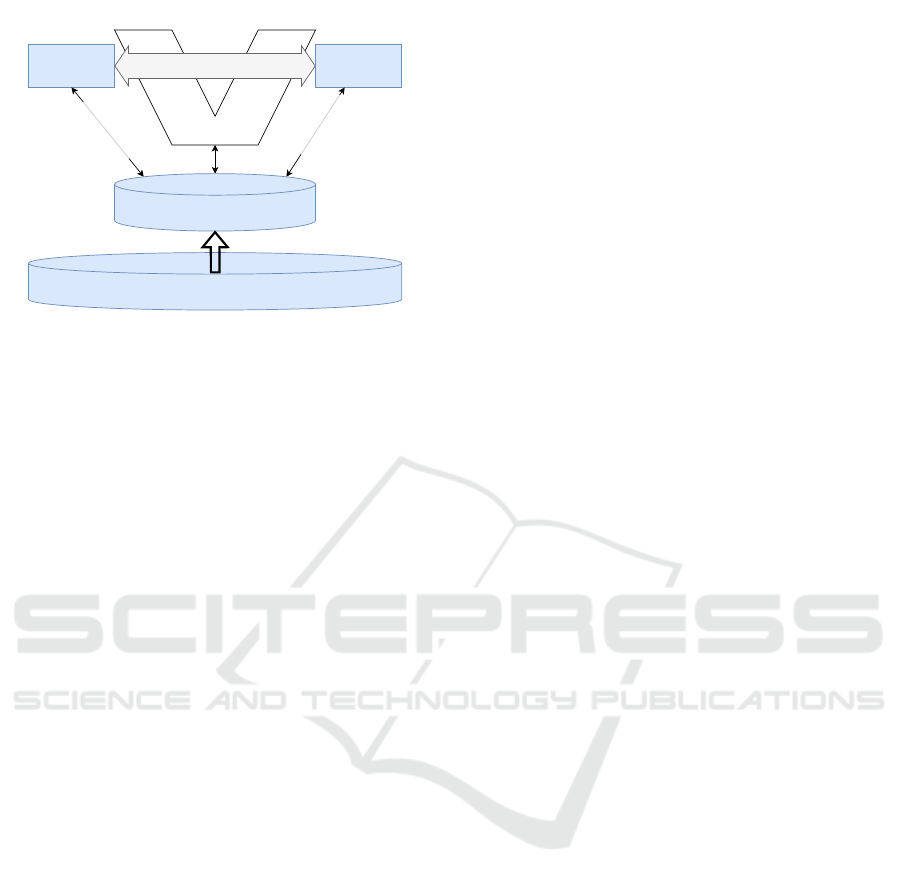
Scenario
Elicitation & Analysis
Safety
Assessment
Consistent and Traceable
Scenario Usage
Scenario Database
Which scenarios occur during
real-world driving?
What are common parameter
distributions and corner
cases?
Which scenarios are covered
by test drives?
What was the systems
behavior in those scenarios?
Scenario-based Development Process
Recorded Driving Data
Figure 1: Leveraging recorded driving data within a
scenario-based, automotive development process. On the
left side the fundamental challenge of coverage needs to be
addressed, on the right side large numbers of scenarios and
test cases need to be evaluated.
systems engineering (Bock et al., 2019). Within the
different development phases, recorded driving data
can be leveraged: Bach et al. describe the use of
recorded driving data for requirements elicitation and
analysis, system and software design, unit construc-
tion and verification, and software and system inte-
gration and qualification (Bach et al., 2017).
Besides systems engineering challenges in a
scenario-based development methodology, large
amounts of recorded driving data lead to challenges
in data management. Scenarios need to be labeled to
identify relevant ones efficiently in hundreds or thou-
sands of hours of driving data. Providing a way to
store and retrieve information, that is convenient and
efficient, is the primary goal of Database Manage-
ment Systems (DBMSs) (Silberschatz et al., 2020).
The management involves the definition of struc-
tures for storing information, providing mechanisms
for manipulation and providing scalability to large
amounts of information (Silberschatz et al., 2020).
While the scenario database is a broadly used concept
for scenario-based development (Bach et al., 2017;
P
¨
utz et al., 2017; Riedmaier et al., 2020), a con-
crete database structure for recorded driving data is
hardly detailed. In this context, the main contribu-
tion of this work is twofold: First, we discuss a de-
tailed database design and suggest a concrete data
structure. Secondly, we propose a highly efficient, but
flexible scenario detection as crucial enabler. A new
method and algorithm for scenario detection supports
complex pattern matching in multivariate time series.
Such a scenario database can be used throughout the
automotive development process, as indicated in Fig-
ure 1.
In Section 2 we start with the analysis of require-
ments and expectations on a scenario database. Based
on these requirements we suggest a concrete struc-
ture for such a database in Section 3. Therefore sce-
nario detection is a basic necessity and we use regu-
lar expressions as a formal model to define relevant
data patterns. This concept was introduced in (Elspas
et al., 2020), but is further detailed and extended in
Section 4 to deal with patterns in multivariate time
series. The concept is exemplarily evaluated in Sec-
tion 5 and we compare our concept with with state of
the art approaches in Section 6.
2 REQUIREMENTS ON A
SCENARIO DATABASE FOR
DRIVING DATA
Setting up a scenario database in practice is challeng-
ing. Recorded driving data includes information from
perception systems, sensor fusion, planning and pre-
diction modules and the controllers of driving func-
tions. Bottom-up approaches, where repeating and
similar patterns are clustered to receive interpretable
groups of scenarios have to deal with the high dimen-
sionality of recorded driving data. Current unsuper-
vised approaches explicitly select meaningful signals
before identifying clusters in the data. So Monta-
nari et al. cluster groups of lateral driving maneu-
vers (Montanari et al., 2020), Langner et al. clus-
ter similar road segments (Langner et al., 2019) and
Ries et al. reduce the driving state to a few, binned
signals, before similar driving sequences are identi-
fied via an adaption of word embeddings (Ries et al.,
2019). Consequently the found clusters are biased to-
wards the feature engineering and unsupervised sce-
nario detection seems to be still limited to cluster rel-
atively few features of a scenario.
Within a scenario database a broad number of sce-
nario features should be obtainable. In contrast to
unsupervised methods, rule-based approaches are de-
terministic, provide interpretability and can be used
to identify scenario features in recorded driving data
as well (Elspas et al., 2020; Montanari et al., 2021;
de Gelder et al., 2020). With the proper data struc-
tures and methods, such scenario features can be effi-
ciently combined to scenarios, as we will further elab-
orate in this work.
2.1 Recorded Driving Data
Current vehicles have a large number of distributed
Electronic Control Units (ECUs), that communicate
and exchange information via signals on different
Towards a Scenario Database from Recorded Driving Data with Regular Expressions for Scenario Detection
401

Figure 2: Trace data with a stream of messages. No direct
access to the signals is supported.
bus systems, like CAN or FlexRay. Data recording
is commonly done by logging all messages on the
bus systems. Especially odometry data, map data,
detected lane markings, traffic signs and other traf-
fic participants from the perception systems provide
valuable scenario information. However, such traces
are highly unstructured data, as indicated in Figure 2,
and there is no direct access to individual signals. For
large scale aggregations and data analytics direct ac-
cess to the dedicated signals is efficient and a desir-
able data interface.
But also data enrichment is necessary. Restricted
band width, low latency and limited compute power
within the vehicle lead to groups of signals that are
highly optimized and might require extensive do-
main knowledge for a proper interpretation. There-
fore recorded driving data needs to be enriched by
smoothed or filtered signals and by decoded signal
groups with less efficient, but better understandable
information. Furthermore the advantage of hindsight
and larger compute capabilities allow powerful pro-
cessing and pattern matching to identify abstracted
scenario information.
2.2 Scenario Model
The major goal of a scenario database is the conve-
nient, efficient and intuitive access to scenarios from
recorded driving data. However, there is neither a
complete set of possible scenarios, nor could those
scenarios be objectively identified in recorded data. A
limited field of view, sensor noise, perception uncer-
tainty and even erroneous data make the scenario de-
tection challenging. According to the commonly used
definition from Ulbrich et al. a scenario is the tempo-
ral development of scenes and a scene is the snapshot
of the environment including scenery and dynamic
elements (Ulbrich et al., 2015). In the real world
scenes are incomplete, uncertain or even incorrect.
For the description and representation of scenes a 5
Layer model can be used to distinguish features be-
longing to the road level (Layer 1), traffic infrastruc-
ture (Layer 2), temporal modifications of the previous
layers (Layer 3), Objects (Layer 4) and Environment
(Layer 5) (PEGASUS Project, 2019; Bagschik et al.,
2018). Future work added a sixth layer for digital in-
formation (Bock et al., 2018; Scholtes et al., 2021).
Those layers provide a structure for the features that
represent singular aspects of scenes and scenarios. In
Figure 3: A scenario is the development of scenes (Ulbrich
et al., 2015). A scene can be defined with a morphological
matrix of scenario features.
the following we refer to those as “features” or “sce-
nario features”.
De Gelder and Op den Camp suggest the use of
tags, arranged in multiple tree structures, to describe
these features (de Gelder and Camp, 2020). In a flat-
tened structure, such features can be arranged in a
morphological matrix, as exemplarily shown in Fig-
ure 3, for a simple interface to describe scenes.
An issue of such models is the quickly explod-
ing scenario space it describes. The shown example
can already represent 2.268 different scenes that lead
to over 5 million different scenarios consisting of 2
scenes. The question for all relevant scenarios in the
context of a combinatorially exploding scenario space
is broadly raised and discussed in research (de Gelder
et al., 2019; Hauer et al., 2019; Koopman and Fratrik,
2019; Hartjen et al., 2020).
Since there is no simple answer to a complete set
of scenarios, an extendible and flexible database de-
sign is necessary. Scenario features, that provide the
basic building blocks of a scenario, should not only
be an intermediate processing step, but a substantial
part of the database. Those could be used for data ex-
ploration on a feature level and support iterative and
data-driven assembly of scenario catalogues.
2.3 Scalability and Versioning
Besides the expectations on a formal scenario model
and the need of structured data, large amounts of
recorded driving data require proper data manage-
ment. Scalability is needed to handle increasing
amounts of data as well as increasing sets of features
and scenarios. Independent data tables, so called re-
lations, for all the different features and scenarios can
be used to support multiple parallel processing and
scenario detection tool chains. With changing sce-
VEHITS 2022 - 8th International Conference on Vehicle Technology and Intelligent Transport Systems
402

nario parametrization during the development, also
versioning concepts are needed as Automotive SPICE
requires traceability along the development phases.
2.4 Summary
As discussed in this section, a scenario database has
to address challenges and expectations from different
engineering field. In summary, we see 3 major points
of view, that are addressed by our proposed concept:
1. Raw data traces alone are hardly sufficient for an-
alyzing large amounts of data. Therefore the data
needs to be structured and provide efficient inter-
faces for flexible and scalable data access.
2. Scenario specification and scenario-based testing
requires a higher-level of abstraction than the raw
signals. Enrichment with scenario features can
provide a more intuitive and desirable interface.
3. Data Management has to deal with a large and
growing number of scenarios and scenario fea-
tures. Together with versioning requirements, a
modular concept is needed to avoid complicated
dependency structures.
3 A HYBRID DATABASE FOR
TIME SERIES AND INTERVALS
Temporal data, such as recorded driving data can be
represented in different forms. In contrast to data
traces, multivariate time series provide values for
each, discrete time step. An other representation are
time intervals. Instead of providing the values for
each time step, each value is saved along with a start
time and an end time. In the given context, the value
can be interpreted as a (scenario-) label. Time in-
tervals can be easily extended with further attributes.
Besides the duration, indicated by start and end time,
also the driven distance or the mean velocity could
be added to each interval. This provides a powerful
representation for large scale aggregations: The time
intervals can be grouped by the label and attributes
can be aggregated or used for further filtering. Conse-
quently both representations, time series and time in-
tervals have their eligibility. For a scenario database,
we suggest a hybrid database containing time series
along with time intervals to leverage advantages from
both representations.
3.1 Data Structure
Data traces are hardly efficient for large scale data an-
alytics. For this purpose relevant signals can be in-
Figure 4: Concept for a Hybrid Scenario Database with
Time Series and Time Intervals to represent scenarios. Time
Intervals can be stored in independent relations to simplify
scaling and versioning.
dexed or extracted in a different data format. In this
work we suggest the use of a columnar storage for-
mat, where a unique file id and the timestamp form
the primary key, which is a unique identifier of each
data row. The extraction of signals into a columnar
storage of time series is shown in Figure 4 as the data
preparation step. To align the signals, that are sent
consecutively over the bus interface in the vehicle we
round the timestamps to 10 ms and use a forward fill.
While a time series database can already provide
various data statistics, a scenario-based development
requires data access on an event level. This means a
single scenario, covering a certain time span, should
be represented as a single entry in the database. Sce-
nario detection can derive time intervals as a conve-
nient data representation as shown in Figure 4. Start
and end times of a scenario can be saved and further
attributes like the mean velocity or maximum accel-
eration can provide valuable scenario attributes to an-
alyze parameter distributions or further filtering.
Finally, each detected scenario provides valuable
information, that could be used to derive further or
combined scenarios. To avoid a detection logic that
has to deal with the input of time series and inter-
vals we suggest the concept of virtual signals, as out-
lined in Figure 4. Time intervals can be dynamically
read as time series and are therefore available to all
applications using the signal representation. This in-
cludes the scenario detection so that detected scenar-
ios can be simply referenced and reused in the de-
tection logic. Note, that the extensive use of virtual
signals can cause complex dependency structures and
we suggest a limitation to two levels of abstraction as
detailed in the following section.
3.2 Scenario Features and Scenarios
As described in Section 2.2, a scenario is a compo-
sition of multiple scenario features and their tempo-
ral development. Not all scenario features are di-
Towards a Scenario Database from Recorded Driving Data with Regular Expressions for Scenario Detection
403

Figure 5: Concept to decouple the detection of scenario-
features and scenarios. The scenario features are repre-
sented as time intervals but can be read as time series dy-
namically to support the same processing logic in both
steps.
rectly available in the recorded driving data. Identi-
fying meaningful and intuitive features can be done
by simple mappings, decoding and combining groups
of signal, smoothing and filtering. Rule-based ap-
proaches and pattern matching can be used to iden-
tify more complex features or driving maneuvers like
cut-ins. The correct interpretation and processing of
the available signals might need significant domain
knowledge.
To reduce the complexity for a scenario engineer
to deal not only with multiple dimensions of a sce-
nario, but also the mapping of desired scenario fea-
tures to the available information in recorded driving
data, we suggest a 2-step process, as shown in Fig-
ure 5. First the recorded driving data is abstracted to
a set of scenario features. This can be done by a num-
ber of independent feature detectors. All the process-
ing steps are defined in configuration files that can be
versioned and can be used to reproduce the detection
results. The detected features are stored as time in-
tervals. In contrast to appending the detected features
as derived signals to the time series, the time interval
representation supports scalable and convenient data
access within the feature space. This way statistics
about the frequency and duration or even the distribu-
tion of feature attributes can be evaluated even before
the combination to scenarios.
Finally the scenario features provide an abstracted
data representation and support the scenario defini-
tion. The available features can be arranged in a mor-
phological matrix, as in Figure 3, or provide the basis
for Graphical User Interfaces (GUIs) to define scenar-
ios without further programming or data processing
knowledge. Figure 6 shows an example GUI where a
scenario is defined as the sequence of 5 distinct scenes
based on 3 features for lateral, longitudinal maneu-
vers of the ego vehicle and cut-ins. For the practical
realization, the concept of virtual signals is crucial:
It allows dynamically reading the identified features,
represented as time intervals, as time series. Then, the
same framework and methods can be used to detect
features and scenarios.
4 REGULAR EXPRESSIONS FOR
PATTERN DETECTION IN
MULTIVARIATE TIME SERIES
The proposed concept of a hybrid scenario database
is strongly based on the capability to identify features
and scenarios in time series data. Therefore we sug-
gest a method that leverages regular expression for
matching temporal patterns in multivariate time se-
ries. While the basic idea of using regular expres-
sion for scenario detection was already described in
(Elspas et al., 2020), we further detail the concept to
support multivariate patterns while keeping a simple
interface. The method is in accordance with the sce-
nario definition as temporal development of scenes
(Section 2.2). For simplicity we describe the scenario
detection for the combination of features to scenes
and scenarios, even though the method can be used
equally for the detection of features from the raw driv-
ing signals.
4.1 Basic Approach
As interface for describing scenarios we use an or-
dered list of scenes. Each scene is defined by a
boolean expression based on one or multiple signals
from the input data. Furthermore a minimum and
maximum duration define the number of time steps
that should be matched for a valid pattern.
Now the scenario detection can step through the
recorded driving data and evaluate the scene condi-
tions: If the current scene condition is satisfied, then
the next time step is evaluated with the next scene
condition in the scenario pattern. If the scene duration
is longer than one time step the same condition might
be evaluated multiple times. If all scenes of a scenario
pattern were positively evaluated, the corresponding
sequence can be marked as a matched scenario.
However, this simple algorithm gets more compli-
cated when scenes do not have a fixed, but a variable
length. With flexible scene lengths large numbers of
concrete scenario pattern become valid and more ded-
icated search algorithms are needed. In this work, we
suggest the use of regular expressions with recursive
backtracking as a mature and formalized method for
pattern detection in sequential data.
4.2 Regular Expressions
Regular expressions (regex), as described in detail
in (Friedl, 2006), are widely used in text-processing
and search interfaces as a powerful tool for pattern
matching. They are rooted in theoretical computer
science as a part of formal language theory where they
VEHITS 2022 - 8th International Conference on Vehicle Technology and Intelligent Transport Systems
404

Figure 6: GUI for designing a scenario from pre-detected features. First a set of features and the number of scenes can be
selected. Then each scene can be configured with concrete values for each feature and a flexible duration. The configured
detector can be directly executed on recorded data or exported for deployment.
describe regular languages. Regex provide a com-
pact interface to express sequential pattern. So called
quantifiers can be used to describe repeating occur-
rences of a symbol. We use these to model scene du-
rations with a minimal and a maximal number of time
steps to provide high flexibility in the scenario defini-
tion.
When using scenes of flexible duration, it must be
distinguished between greedy or lazy search patterns.
Greedy means that the maximum scene length is tried
to match before continuing with the next scene. If
matching fails, the scene length is reduced step by
step until a valid scenario is found or the minimum
scene length is reached. A lazy, or non-greedy, search
would evaluate the next scene directly after the min-
imum scene length was matched and only extend the
scene length if the remaining scenario pattern was not
matched. Both search methods can result in different
detection results and should be considered.
4.3 Interface and Algorithm
While regular expressions provide the temporal con-
cepts that are needed for scenario detection, they op-
erate on strings. However, recorded driving data
are multivariate time series of numeric, categorical,
boolean or even mixed type. To apply regex, each
time step in multivariate time series can be mapped to
a state variable and encoded as a single character. By
concatenating those characters, recorded driving data
can be represented as string.
As a high level interface we use an ordered list of
scenes to define a scenario. Within a python based
framework for scenario detection a boolean condi-
Figure 7: Scenario detectors can be configured as a list
of scenes with minimum and maximum duration (left) and
are automatically composed to a regular expression, that is
matched within the data (right). Also further regex opera-
tors can be used within the right interface.
tion, based on one or more signals, and minimum and
maximum duration are defined in a configuration file.
Greediness is supported via a boolean flag. The in-
terface for an exemplary scenario with three scenes
is shown in Figure 7 on the left. While the user of
this interface does not have to deal with regex at all,
internally the parameters are arranged within a sec-
ond, regex based interface as shown in Figure 7 on
the right. The scene conditions are mapped to an
alphabet and the durations to regex operators. Also
greediness is supported by the according regex oper-
ator. Advanced users could also directly define the
regex pattern and leverage the full expressive power
of regular expressions.
If all the defined scenes are mutually exclusive,
each time step can be assigned to a unique state. How-
ever, the exclusiveness of scenes is a limiting require-
ment and we use a further mapping to support also
non exclusive states: For each time step all state con-
Towards a Scenario Database from Recorded Driving Data with Regular Expressions for Scenario Detection
405

Figure 8: The algorithm for scenario detection with regular expressions: Based on a scenario configuration the input signals
are processed in 3 major steps to receive labels for all matched scenarios. The encoding as a boolean state vector with the
mapping to a new alphabet supports multivariate pattern.
ditions are evaluated and create a boolean state vector.
Now each distinct state of the boolean vector can be
dynamically assigned to a character. Before finding
all matches of a given regex, also the regular expres-
sion itself needs to be adapted to the new alphabet.
Formally, the input is a set of conditions described
by boolean expressions q
1
, . . . , q
n
with their labels
Σ = {A, B, C, . . . } and a regular expression r over Σ.
Now, the pattern detection consists of three steps, as
exemplarily shown in Figure 8:
1. All boolean state conditions are evaluate and ap-
pend the input data with new boolean columns.
2. Each time step is labeled with a new char encod-
ing Σ
0
such that each combination of truths for the
boolean expressions is uniquely encoded by a sin-
gle character. The input regex r is updated to r
0
over Σ
0
. To do so each A ∈ Σ is replaced with
the set of characters from Σ
0
which encode a truth
combination where A’s boolean expression holds.
3. The time series encoding in Σ
0
is concatenated to a
string and all occurrences of r
0
are matched. The
start and end positions are mapped back to time
steps.
This algorithm links an abstracted scenario defi-
nition with mature pattern matching. Flexible time
ranges of scenes are supported. Even further regex
concepts, like look ahead and look back operators,
can be used to define contemporary scenes or extend
scenario detectors with the evaluation of an expected
system behavior. A further discussion of all the ca-
pabilities of regular expressions is out of the scope of
this work and is left to future usage of the method.
5 INTERACTIVE AND
DATA-DRIVEN SCENARIO
ANALYTICS
Deriving knowledge from recorded driving data is an
iterative process. General reference processes like the
Knowledge Discovery in Databases (KDD) (Fayyad
et al., 1996) or CRoss Industry Standard Process for
Data Mining (CRISP-DM) (Wirth and Hipp, 2000)
stress the loops, where data mining leads to increased
knowledge and refinement of the initial problem in the
next process iteration. This concept also applies for
analyzing recorded driving data for a scenario-based
development. In this section we show exemplary how
the proposed scenario database and scenario detection
enables fast data analytics that allow highly interac-
tive workflows.
5.1 Performance Benchmark
To demonstrate the speed benefits of a data format
that is not optimized for recording bus data in real
time, but for fast read access, we consider a simple
statistical aggregation of the detected lane marking
type for different road types.
The aggregated driving duration for each road
type and lane marking type is shown in Figure 9 and
is based on 340 hours of fully logged driving data,
which account for 5.3 Terabyte of recorded data. Ne-
glecting network traffic to access such data from a
scalable cloud storage, a simple compute node would
need over 10 hours for just reading the necessary two
signals. By structuring the data and extracting 1500
most relevant signals from the raw data requires only
18 GB storage. Also processing shows a significant
speedup. The exemplary analysis evaluates 2 signals
from 1.2 billion time steps and takes roughly 15 min-
utes on a single compute node, which is magnitudes
VEHITS 2022 - 8th International Conference on Vehicle Technology and Intelligent Transport Systems
406

Figure 9: Heatmap with the aggregated duration in hours
grouped by road type and lane marking type.
faster than just reading the raw data. Note, that this
analysis if performed on the time series representa-
tion, by extracting the relevant signal into time inter-
vals, the final aggregation can be performed within
seconds.
5.2 Relaxation and Sub-scenarios
Working with the scenario database, and especially
using the GUI shown in Figure 6, we noticed that
many naively defined scenarios are hardly found in
the recorded data. One reason for this is the quiet
rigid scenario model that requires exact matches. In
practice noisy data, temporarily missing information
or the occurrence of short, intermediate scenes, that
were not considered, can cause finding hardly any
scenarios in the data. If this is not intended, short,
optional gaps between all scenes of a scenario can
be added. We call this concept relaxation and in-
tegrate it into the regex matching algorithm. With
a relaxation parameter defining the maximum num-
ber of time steps, a regex wildcard symbol is added
between all scenes and is matched non-greedily to
find also similar scenarios with short intermediate
scenes. For example the regex pattern A
+
B
∗
C be-
comes A
+
.{, x}?B
∗
.{, x}?C for the relaxation value x.
In regex syntax the “.” symbol matches any state,
while the “?” denotes non-greediness.
We demonstrate the power of this idea by consid-
ering a “follow” scenario where the ego-vehicle reacts
to the acceleration by the leading vehicle:
• Scene 1: The Ego-vehicle has a constant distance
to the leading vehicle and keeps the velocity.
• Scene 2: The distance to the leading vehicle
grows and the ego-vehicle accelerates.
Searching this scenario in 10 hours of driving data
takes 30 seconds and yields 2 scenarios. Increasing
the relaxation parameter yields a significantly increas-
ing number of scenarios as shown in the following ta-
ble:
Such analysis can be performed relatively fast and
provides a method to trade off ideal scenarios versus
their occurrence rate during real world driving.
Relaxation (in s) 0 0.1 0.3 0.5 1 2
Number of matches 2 4 7 15 22 36
Figure 10: Number of occurrences for all sub-scenarios of
a scenario with 5 scenes.
Also larger number of scenes can cause finding
only few scenarios. Sub-scenarios can be searched
and analyzed to identify the scene changes that cause
a low number of detections. Figure 10 shows the num-
ber of occurrences of all sub-scenarios. This means
the occurrences of all 2-scene, 3-scene and 4-scene
scenarios within the 5-scene scenario are identified
and counted. Such analysis can reveal the critical
scene changes that might reduce the number of sce-
narios significantly. Also simple scene statistics about
the minimum, maximum and mean duration of scenes
can be quickly aggregated and provide useful insights.
While such statistics allow no general conclusion,
evaluating detectors quickly and providing additional
information and aggregations from the data is the
key capability of a data-driven validation of scenarios
within the requirements elicitation and analysis phase
of the development process.
6 COMPARISON WITH
RELATED WORK
A scenario database is not a new idea. Bach et al.
use a scenario database for data-driven development
(Bach et al., 2017) and Riedmaier et al. structure
their survey on scenario-based safety assessment by
methods that supply scenarios and methods that ex-
tract scenarios from a scenario database (Riedmaier
et al., 2020). However, a concrete database design is
out of their scope. For a database of relevant scenar-
ios P
¨
utz et al. suggest a 7-step data processing chain
(P
¨
utz et al., 2017). Several of these steps can be found
in our concept as well. Data harmonization and trans-
formation are included in the data preparation where
time series are extracted from raw data traces. How-
ever, we leave most processing steps, like renaming
signals or the generation of deduced signals to the
later scenario detection. Furthermore we do the calcu-
lation of deduced signals dynamically, as this simpli-
fies the data management and the usability for mul-
tiple use cases. A major difference can be seen in
the scenario detection: P
¨
utz et al. calculate scenario
likelihoods over time and extract snippets with a high
likelihoods. However, this approach hardly complies
Towards a Scenario Database from Recorded Driving Data with Regular Expressions for Scenario Detection
407

with the scenario definition by Ulbrich et al. where
a scenario is defined as the temporal development of
scenes (Ulbrich et al., 2015). Defining a continu-
ous scenario probability for a sequence of scenes is
hardly intuitive. Our approach to define scenes with
a boolean condition, based on (derived) signals from
recorded data, and defining a scenario as a sequence
of scenes incorporates the scenario definition by Ul-
brich fundamentally. The use of regular expressions
provides a concrete method for the implementation of
the scenario detection.
The use of regular expressions for scenario detec-
tion was already introduced in (Elspas et al., 2020).
However, the scenes were expected to be mutually
exclusive so that the input data could be reduced to
a time series. In this work we further detailed the
concept and suggested a new algorithm that is able to
deal with contemporary scenes. The support of mul-
tivariate patterns allows a more flexible and intuitive
definition of scenario detectors.
A general discussion of knowledge mining in time
series was done by M
¨
orchen (M
¨
orchen, 2006): In
contrast to Allen’s Interval Operators, that are com-
monly used to describe the relationship between in-
tervals (Allen, 1983), M
¨
orchen introduces a more ro-
bust time series knowledge representation (TSKR). In
this formalism “Tones” provide basic time intervals,
similar to scenario features in the context of driving
data. Chords indicate the simultaneous occurrence
of Tones, similar to scenes. Finally phrases express
a partial order of chords and describe an abstraction
similar to scenarios on a more general pattern level.
While M
¨
orchen suggests a method to find phrases that
is based on the support of chords, we suggest the use
of regular expressions to leverage domain knowledge
about scenarios of interest within a well defined and
flexible formalism.
Regex matching in multivariate time series has
also be used in (Rodrigues et al., 2019). In contrast to
our approach, the authors create the symbolic string
for regex matching by appending the symbolic states
from each input signal in an alternating way. We ar-
gue, that this adds cognitive load to the domain ex-
perts who has to define a regex pattern across differ-
ent alphabets of the input series. Also the length of
the string grows linear with each input signal, which
can cause bad performance. Our approach maps the
boolean scene conditions dynamically on a new al-
phabet and keeps the input length and the computa-
tional complexity. A disadvantage of our approach
might be the limited alphabet. The number of distinct
states in the target alphabet grows exponentially with
the number of boolean scene conditions. Due to the
dynamic approach to map only occurring states, we
did not reach this theoretical limitation in practice.
7 CONCLUSION AND OUTLOOK
Scenario-based development is a crucial enabler for
increasing capabilities of ADAS and ADS. For safety
assessment and system qualification with highest va-
lidity, scenarios from real world driving data are a ne-
cessity. While the concept of a scenario database is
often mentioned in literature, the necessary data struc-
tures remain vague or require already fully defined
scenarios. However, we argue that recorded driving
data should also be leveraged to derive meaningful
scenario specifications in the first place. Therefore
we proposed a highly flexible database design, that
allows decoupling scenario features and supports fast
and interactive queries. The advantages of time series
and time intervals are combined by a hybrid database
structure that allows dynamic transformation between
both representations. Our performance evaluations
demonstrates the efficiency for a broad spectrum of
tasks from simple queries and aggregations of time
series, over the recombination of scenario features
to scenarios, up to identifying similar scenarios or
sub-scenarios. With the proposed design many hours
of driving data can be analyzed within few minutes,
which enables an interactive and data-driven develop-
ment.
While this work describes a concept for data man-
agement along with a method for domain experts to
define and find scenarios of interest, more data-driven
approaches can provide a valuable complement. So
it was shown in (Elspas et al., 2021), that neural net-
works can be trained for scenario detection with weak
labels from rule-based approaches to identify simi-
lar and additional scenarios. Saturation effects, as in
(Hartjen et al., 2020), could be used to estimate the
scenario coverage or various forms of anomaly de-
tection could identify corner cases. Nevertheless, an
efficient and performant database provides a valuable
and beneficial basis for further research with recorded
driving data.
REFERENCES
Allen, J. F. (1983). Maintaining knowledge about temporal
intervals. Communications of the ACM, 26(11).
Bach, J., Langner, J., Otten, S., Holz
¨
apfel, M., and Sax, E.
(2017). Data-driven development, a complementing
approach for automotive systems engineering.
Bagschik, G., Menzel, T., and Maurer, M. (2018). Ontol-
ogy based scene creation for the development of auto-
VEHITS 2022 - 8th International Conference on Vehicle Technology and Intelligent Transport Systems
408

mated vehicles. IEEE Intelligent Vehicles Symposium,
Proceedings, 2018-June:1813–1820.
Bock, F., Sippl, C., Heinz, A., Lauer, C., and German,
R. (2019). Advantageous usage of textual domain-
specific languages for scenario-driven development of
automated driving functions. In 2019 IEEE Interna-
tional Systems Conference, SysCon 2019. IEEE.
Bock, J., Krajewski, R., Eckstein, L., Klimke, J., Sauerbier,
J., and Zlocki, A. (2018). Data basis for scenario-
based validation of had on highways. In 27th Aachen
colloquium automobile and engine technology.
de Gelder, E. and Camp, O. O. d. (2020). Tagging real-
world scenarios for the assessment of autonomous ve-
hicles. arXiv preprint arXiv:2012.01081.
de Gelder, E., Manders, J., Grappiolo, C., Paardekooper,
J.-P., Camp, O. O. d., and De Schutter, B. (2020).
Real-world scenario mining for the assessment of au-
tomated vehicles. arXiv preprint arXiv:2006.00483.
de Gelder, E., Paardekooper, J.-P., Op den Camp, O., and
De Schutter, B. (2019). Safety assessment of auto-
mated vehicles: how to determine whether we have
collected enough field data? Traffic injury prevention,
20(sup1).
Elspas, P., Klose, Y., Isele, S. T., Bach, J., and Sax, E.
(2021). Time series segmentation for driving scenario
detection with fully convolutional networks. In Pro-
ceedings of the 7th International Conference on Vehi-
cle Technology and Intelligent Transport Systems, VE-
HITS 2021. SCITEPRESS.
Elspas, P., Langner, J., Aydinbas, M., Bach, J., and Sax,
E. (2020). Leveraging regular expressions for flexible
scenario detection in recorded driving data. In 2020
IEEE International Symposium on Systems Engineer-
ing (ISSE). IEEE.
Fayyad, U. M., Piatetsky-Shapiro, G., and Smyth, P. (1996).
Knowledge discovery and data mining: Towards a
unifying framework. In Proceedings of the Second In-
ternational Conference on Knowledge Discovery and
Data Mining (KDD-96), pages 82–88. AAAI Press.
Friedl, J. E. (2006). Mastering regular expressions.
O’Reilly Media, Inc.
Hartjen, L., Philipp, R., Schuldt, F., and Friedrich, B.
(2020). Saturation effects in recorded maneuver data
for the test of automated driving.
Hauer, F., Schmidt, T., Holzm
¨
uller, B., and Pretschner, A.
(2019). Did we test all scenarios for automated and
autonomous driving systems? In 2019 IEEE Intelli-
gent Transportation Systems Conference, ITSC 2019.
IEEE.
Koopman, P. and Fratrik, F. (2019). How many operational
design domains, objects, and events? In Workshop
on Artificial Intelligence Safety 2019, volume 2301 of
CEUR Workshop Proceedings. CEUR-WS.org.
Langner, J., Grolig, H., Otten, S., Holz
¨
apfel, M., and
Sax, E. (2019). Logical scenario derivation by clus-
tering dynamic-length-segments extracted from real-
world-driving-data. In Proceedings of the 5th Inter-
national Conference on Vehicle Technology and Intel-
ligent Transport Systems, VEHITS 2019. SciTePress.
Menzel, T., Bagschik, G., Isensee, L., Schomburg, A., and
Maurer, M. (2019). From functional to logical scenar-
ios: detailing a keyword-based scenario description
for execution in a simulation environment. In 2019
IEEE Intelligent Vehicles Symposium (IV). IEEE.
Menzel, T., Bagschik, G., and Maurer, M. (2018). Scenarios
for development, test and validation of automated ve-
hicles. In 2018 IEEE Intelligent Vehicles Symposium,
IV 2018. IEEE.
Montanari, F., German, R., and Djanatliev, A. (2020). Pat-
tern recognition for driving scenario detection in real
driving data. In IEEE Intelligent Vehicles Symposium,
IV 2020. IEEE.
Montanari, F., Ren, H., and Djanatliev, A. (2021). Scenario
detection in unlabeled real driving data with a rule-
based state machine supported by a recurrent neural
network. In 93rd IEEE Vehicular Technology Confer-
ence, VTC 2021. IEEE.
M
¨
orchen, F. (2006). Time series knowledge mining.
PEGASUS Project (2019). The PEGASUS method. [On-
line; accessed 05-December-2021].
P
¨
utz, A., Zlocki, A., Bock, J., and Eckstein, L. (2017).
System validation of highly automated vehicles with
a database of relevant traffic scenarios. 12th ITS Eu-
ropean Congress.
Riedmaier, S., Ponn, T., Ludwig, D., Schick, B., and Dier-
meyer, F. (2020). Survey on scenario-based safety as-
sessment of automated vehicles. IEEE Access, 8.
Ries, L., Langner, J., Otten, S., Bach, J., and Sax, E. (2019).
A driving scenario representation for scalable real-
data analytics with neural networks. In 2019 IEEE
Intelligent Vehicles Symposium, IV 2019. IEEE.
Rodrigues, J., Folgado, D., Belo, D., and Gamboa, H.
(2019). SSTS: A syntactic tool for pattern search on
time series. Inf. Process. Manag., 56(1).
Scholtes, M., Westhofen, L., Turner, L. R., Lotto, K.,
Schuldes, M., Weber, H., Wagener, N., Neurohr, C.,
Bollmann, M., K
¨
ortke, F., Hiller, J., Hoss, M., Bock,
J., and Eckstein, L. (2021). 6-layer model for a struc-
tured description and categorization of urban traffic
and environment. IEEE Access, 9.
Silberschatz, A., Korth, H. F., and Sudarshan, S.
(2020). Database System Concepts, Seventh Edition.
McGraw-Hill Book Company.
Ulbrich, S., Menzel, T., Reschka, A., Schuldt, F., and Mau-
rer, M. (2015). Defining and substantiating the terms
scene, situation, and scenario for automated driving.
In 2015 IEEE 18th International Conference on In-
telligent Transportation Systems, volume 2015-Octob.
IEEE.
VDA QMC Working Group 13 / Automotive SIG (2017).
Automotive SPICE Process Assessment / Reference
Model.
Wirth, R. and Hipp, J. (2000). Crisp-dm: Towards a stan-
dard process model for data mining. In Proceedings of
the 4th international conference on the practical ap-
plications of knowledge discovery and data mining.
Springer-Verlag London, UK.
Towards a Scenario Database from Recorded Driving Data with Regular Expressions for Scenario Detection
409
