
A Performance Benchmark of Formulated Methods for
Forecast or Reconstruct Trajectories Associated to the
Process Control in Industry 4.0
Davi Neves
1 a
and Ricardo Augusto Rabelo Oliveira
2 b
1
Department of Production Engineering, University Federal of Ouro Preto, Ouro Preto, Brazil
2
Department of Computing Science, University Federal of Ouro Preto, Ouro Preto, Brazil
Keywords:
Dynamic Systems, Koopman Operator, Reinforcement Learning, Neural Networks, Topological Measures.
Abstract:
Manufacturing processes are generally modeled through dynamic systems, whose solutions establish a tool for
control theory, essential in the elaboration of industrial automation, a pillar of the fourth revolution. Under-
standing and mastering these technological procedures correspond to the ability to determine and analyze the
solutions of a system of differential equations, in order to deploy smart devices in a production line, such as the
robotic arm, because this trajectories can be always associated with the running of any equipment. Currently
there are many formulated methods to determine (or forecast) these curves, through numerical or stochastic
tools, the focus in this work are those capable of reconstructing a state space, such as the Koopman’s oper-
ator, convolutional neural network and reinforcement learning technique. Therefore, based on the solutions
provided by these methods, a benchmark will assembled to compare them, using topological measures such
as Shannon entropy, Lyapunov exponent and Hurst coefficient, thus defining the effectiveness of each one.
1 INTRODUCTION
The automation of manufacturing processes dates
back to the first industrial revolution (Clark, 2014),
when thermal machines mechanized tasks once per-
formed by hands, expediting and improving industrial
production; now, facing the fourth revolution sup-
ported by electronic devices, an efficiency growing
is elucited and consequently to emerge greats chal-
lenges for scientists and engineers (Xu et al., 2018a;
Prisecaru, 2016; Xu et al., 2018b).
Primary challenge in the automaton process is the
fit of its results, considering the input values in system
that represents this process; studies that approach this
topic are classified into the control theory, an applied
area of dynamical systems (Nise, 2020; Rodic, 2009),
which are formally represented by coupled differen-
tial equations (Haddad and VijaySekhar, 2011; Salle,
1976).
Normally, the control theory of automatized man-
ufacturing processes correspond to the solutions and
analysis of the differential equations that model them;
these systems are usually named like governing equa-
a
https://orcid.org/0000-0002-3144-0207
b
https://orcid.org/0000-0001-5167-1523
tions and their solutions are computed with numerical
methods (Stuart and Humphries, 1998; Beyn, 1991)
or block diagrams (Nise, 2020).
An ordinary differential equation express the be-
havior of a curve, this way the solution of coupled
equations correspond the union of distinct curves,
thus forming a n-dimensional surface known as man-
ifold. These structures are studied in topology, a the-
ory that provide tools to the understand of dynamic
systems (Akin, 2010; Materassi and Innocenti, 2010).
Curves (trajectories) referring to the solutions of
a dynamical system can be illustrated in state space,
rather than real space, because in this hidden symme-
tries are highlighted (Prince, 1982; Levi and Winter-
nitz, 1996). Koopman and von Neumann observed
this important detail and based on that they formu-
lated a theory (Koopman, 1931; v. Neumann, 1932a;
v. Neumann, 1932b) with enormous effectiveness and
usefulness for data-driven analysis (Williams et al.,
2015; Mezi
´
c, 2013; Proctor et al., 2018).
Using Koopman operator is possible to recon-
struct the trajectories in state space, which constitutes
a method to determine predictions regarding the sys-
tem’s behavior and hence a control tool for the cor-
responding process (Li and et al, 2017; Bruder et al.,
594
Neves, D. and Oliveira, R.
A Performance Benchmar k of Formulated Methods for Forecast or Reconstruct Trajectories Associated to the Process Control in Industry 4.0.
DOI: 10.5220/0011086800003179
In Proceedings of the 24th International Conference on Enterprise Information Systems (ICEIS 2022) - Volume 1, pages 594-601
ISBN: 978-989-758-569-2; ISSN: 2184-4992
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

2019).
Due to importance of this reconstruction process
other methods have been developed, among which it
is worth mentioning the Packard theory that use delay
coordinates (Packard and et al, 1980) and those that
use neural networks, with convolutional (Hauser and
et al, 2019; Teng and Zhang, 2019) or autoencoders
structures (Otto and Rowley, 2019; Almazova et al.,
2021; Champion and et al, 2019).
To complement the control theory approach ref-
erent to trajectories analysis, reinforcement learning
should also be included, because in this method the
most probable trajectory is determined by a Marko-
vian decision process. Although this methodology
(stochastic) is not in the same context (deterministic)
as the ones mentioned before, its leading objectives
are equivalents: compute the path most effective to
carry out a process (Sutton and Barto, 2018; Kael-
bling et al., 1996).
In order to elaborate an analysis that cover all
these methods, a robotic arm was selected like ob-
ject of study, due to your wide bibliographic reference
and the inherent complexity its mathematical model, a
double pendulum (chaotic behavior), thus warranting
the suitable requirements for build the benchmark.
We started with a theoretical review of dynamic
systems and their fasten relationship with process
control, followed by the Koopman operator approach,
in next section we present essential concepts about
models that use reinforcement learning and then we
complement the description of the methods to trajec-
tories rebuild with a decoder type neural network.
The theoretical overview will be concluded with
the presentation of the effectiveness measures, us-
ing topological methods such as Lyapunov exponent,
Hurst coefficient and Shannon entropy (Akin, 2010);
we will also elucidate Pearson’s statistical coefficient
(Montgomery et al., 2009), which makes it possible
to analyze the correlation between real and predicted
trajectories.
In results section we will present the simulation
environment, in which highlight the hardware and
softwares used, proceeding to the proposed analy-
ses, where we will evaluate the effectiveness of each
method mentioned, always establishing a relationship
with the robotic control.
2 DYNAMICAL SYSTEMS AND
CONTROL
Dynamical systems are essential in the control of in-
dustrial devices and processes, because their govern-
ing equations compose the theoretical formulation of
these events. Analysis can be performed through the
corresponding block diagram or by state space (Nise,
2020), for nonlinear equations the latter is the alter-
native most pertinent (Stuart and Humphries, 1998;
Beyn, 1991), since symmetries and topological mea-
sures are highlighted, which contribute significantly
to the control of projects in industry 4.0 (Xu et al.,
2018a).
A trivial case study that provides the elucidation
of these controls is robotic arm, whose objective is
to reach a target and then move it; this process, or
device, can be modeled using equations that govern
the motion of a double pendulum, and despite being a
three-dimensional system, for simplicity without lose
the essence, can be modeled in two dimensions.
According to these considerations, the differential
equations must couple the angular variable (θ) and
their respective velocity (ω), resulting in complex ex-
pressions that can be presented in a concise way:
∂
~
θ
∂t
=
ˆ
F
~
θ,t,α
(1)
In (1) θ and ω are coupled into
~
θ vector, while
the equations system is represented by functional
ˆ
F,
named like field, because it’s associated with the vec-
tor field of the states space corresponding.
Time is illustrated by the dependent variable t and
the system parameters are represented by α; also, re-
garding (1), is worth noting that this system refers to
continuous states, for the discrete case a more ade-
quate formulation would be:
~
θ
k+1
=
ˆ
F.
~
θ
k
(2)
In the control theory θ
k+1
represents the output of
the system (posteriori signal) and θ
k
is called of input
(priori signal), while
ˆ
F operator promote state evo-
lution (θ); to establish the control this operation must
be linearized, making outputs directly associated with
input signals, thus elucidating the scope of this theory.
For linear systems, the control methodology is al-
ready well established, so there are several tools, the-
oretical and practical, to adjust input signal until the
required output is obtained, within an acceptable mar-
gin of error, however, for nonlinear systems the inher-
ent complexities usually affect your control.
3 KOOPMAN OPERATOR
METHOD
Nonlinear systems are approached by control theory
from linearization methods, such as the Taylor se-
ries truncated, that has inspirited numerous and effec-
A Performance Benchmark of Formulated Methods for Forecast or Reconstruct Trajectories Associated to the Process Control in Industry
4.0
595

tive procedures, however, in this section, will be pre-
sented dimension reduction methods using coordinate
transformations, like the Packard’s work (Packard and
et al, 1980).
Packard’s work inspired others (Broomhead and
et al, 2020; Schmid, 2010), in which the dimen-
sion reduction, such as principal component analysis
(PCA), was combined with the fast Fourier transform
(FFT) to formulate what has been termed by dynamic
mode decomposition (DMD) (Proctor et al., 2018),
that therefore was associated with Koopman operator
(Koopman, 1931), method developed in 1931 for an-
alyze the time evolution of observables.
g
~
θ
k+1
=
ˆ
K.g
~
θ
k
(3)
Fundamentally the Koopman operator (
ˆ
K) works
in the space of observables, relatives to the system’s
states; considering that the dimension of this space is
infinite, the linearization process will be feasible, thus
if the measure function was g
~
θ
the evolution of the
observables will be given by equation (3).
The key point of this methodology is that even if
the operator
ˆ
F, which represents the dynamical sys-
tem, was nonlinear, the Koopman operator will pro-
vide a linear way of time evolve states, thus enabling a
way to reconstruct the trajectories in respective states
space (control).
In its primordial practical formulation, the deter-
mination of the elements of this operator required an
adequate choice of basis functions for the proper rep-
resentation of the
ˆ
K matrix, which was often infeasi-
ble, but currently the construction of these base func-
tions is referred to deep learning methods (Li and
et al, 2017), using neural networks to estimate their
eigenvectors and eigenvalues.
Addition to the use of deep learning, which ex-
panded the applicability of this method (Proctor et al.,
2018), in industry 4.0 context the control usually can
be data-driven (Li and et al, 2017), thus referring
to the DMD method, which enables the construction
of the Koopman operator using data series (Williams
et al., 2015):
ˆ
K ≈
ˆ
T
0
ˆ
T
+
(4)
In (4)
ˆ
T
0
is the matrix of posteriori states and
ˆ
T
+
is
the Moore-Penrose pseudoinverse matrix of previous
states (
ˆ
T ) (Mezi
´
c, 2013; Li and et al, 2017).
As the focus of this work is to evaluate method-
ologies for robot’s arm control, the Koopman opera-
tor will then be built using data from double pendu-
lum simulations, from ordinary differential equations
integration referring to this model.
4 REINFORCEMENT LEARNING
Among many machine learning techniques, control
theory can be meet on the reinforcement learning, in
which an agent interacts with the environment and as
result a learning is constituted, represented by a ta-
ble of rewards referred like Q-table (Sutton and Barto,
2018; Kaelbling et al., 1996).
Formally this learning process can be analyzed
from Bellman’s equation (Sutton and Barto, 2018),
referring to the current state-value ν(θ):
ν(θ) = max
a
R(θ,a) + γ.ν(θ
0
)
(5)
Agent’s action must maximize the sum between
the archived state-value ν(θ
0
) for all possibles next
states θ
0
and the current reward considering all pos-
sibles actions at state θ. Discount factor (γ) was in-
troduced to ν(θ) focus on immediate instead of future
rewards.
After this training, the most efficient trajectory is
performed, or in other words the most probable path,
considering a policy π(θ/a) that defines the probabil-
ities of each action a in a respective state θ, then, set-
ting this methodology like this, your objective is find
the optimum policy π which leads to the build of the
most probable trajectory for the robotic arm.
Although this description elucidates the similar-
ities between the methods discussed in this text, it
should be noted that in this case the essence of the
approach is stochastic, different from deterministic
character adopted by dynamical systems theory.
Currently, there have been improvements with the
use of neural networks, which replace the Q-table in
the agent’s learning process, that is, in the determina-
tion of the most probable trajectory. In this approach,
each agent state will be used as an input signal in
the neural network and the output will be the reward
referring to an action in this state (Kaelbling et al.,
1996).
In this work, trajectories for a robotic arm will
be constructed considering the previous knowledge of
the object’s position to build the Q-table, methods us-
ing the neural networks will also be evaluated, with
soft actor critic algorithm (SAC) (Sutton and Barto,
2018), that optimizes a stochastic off-policy, in order
to carry out the integration of this technique with oth-
ers, thus providing its improvement and expanding its
applicability.
ICEIS 2022 - 24th International Conference on Enterprise Information Systems
596

5 DECODER NEURAL
NETWORKS
Trajectories are essentially graphical representations
of a movement, due to this the most suitable neural
networks to deal with these are convolutional ones, as
will be explained in this section.
Without dodging of the work’s objective, the con-
volutional neural network (CNN) corresponds to a
structure in which an image will be initially polished
and flattened, thus forming a first-order tensor, fitted
like an input signal of this neural network whose lo-
gistical output normally results in the classification
this image (Teng and Zhang, 2019).
Although convolutional neural networks can be
used to analyze dynamical systems (Teng and Zhang,
2019; Otto and Rowley, 2019; Almazova et al., 2021),
the reconstruction of paths in the state space is more
consistent with the structure called like autoencoder
(fig. 1-A), in which a neural network (encoder) com-
presses an image in a latent space to that then a second
network (decoder) make another image, correspond-
ing to the one used as input (Otto and Rowley, 2019;
Almazova et al., 2021).
(A)
(B)
Figure 1: Representation of neural networks structures, in
(A) an autoencoder is illustrated and in (B) the structure
used in this work.
As the purpose of this work is to analyze tech-
niques capable of reconstructing trajectories in the
state space and considering the high cost of autoen-
coders, a reduced structure was elaborated, consti-
tuted only by a network similar to the decoder (fig.
1-B), using as latent space the initial conditions of the
problem in question, that is, the initial positions of the
object and robotic arm, producing as output an image
that illustrates a trajectory in state or real spaces.
Using several trajectories referring to different ini-
tial positions, for the target and robotic arm, a decoder
neural network was trained to construct (not recon-
struct) the trajectories relevant to the aforementioned
control. In the training, initial conditions were put
in the format of a 2x2 matrix, whose elements repre-
sented the positions of the arm and the object, then
this matrix was converted into the image of a trajec-
tory consistent with the pendulum solution.
6 TOPOLOGICAL MEASURES
Visual similarity (or difference) between two curves
can lead to hasty and wrong conclusions, with re-
gard to the evaluation of the reconstruction capacity
of a method, however topological analysis provides
tools to perform the appropriate analysis, with preci-
sion and efficiency.
Pearson’s correlation coefficient may be the first
tool used (Montgomery et al., 2009), because despite
its statistical formulation, its value indicates the co-
herence between two curves, that is, positive values
close to unity correspond to similar curves, on the
other hand, negative values close to unity indicate an
inverse behavior between two curves, finally, to the
other values no correspondence is verified.
ρ =
COV (θ
1
,θ
2
)
p
VAR(θ
1
).VAR(θ
2
)
(6)
The previous expression represents the calculation
of Pearson’s coefficient, using the covariance between
two data series, the first (θ
1
) correspond to original
trajectory and the second (θ
2
) to forecast (rebuild).
The denominator is defined by the square root of the
variances referring to these trajectories.
Another important measure is Shannon entropy,
which defines the amount of information contained in
a data series, considering the occurrence of an event,
its basic formulation is as follows (Materassi and In-
nocenti, 2010):
S = log
P
i+1
P
i−1
(7)
In (7) P
i−1
is the priori probability of the event’s
occurrence and P
i+1
is the posteriori probability.
According to this formulation, is evident that this
value indicates the complexity of respective data se-
ries, as it quantifies the information (bits) needed
to describe the occurrence of this event, however, it
should be noted that, in this work only the similarity
of these measures will be evaluated, as this qualitative
assessment is sufficient for the proposed objectives.
Lastly, two other values will also be determined,
the larger Lyapunov exponent and the Hurst coeffi-
cient (Materassi and Innocenti, 2010), the first being a
measure of data’s chaoticity and the second a measure
A Performance Benchmark of Formulated Methods for Forecast or Reconstruct Trajectories Associated to the Process Control in Industry
4.0
597
of its fractal dimension, which refers to the complex-
ity of this data series, however, in this work these val-
ues will be evaluated only qualitatively, that is, similar
values indicate similar trajectories.
7 RESULTS AND DISCUSSIONS
7.1 Simulation Environment
The results presented in this section were obtained
in a cluster assembled using the Docker engine soft-
ware, with hardware composed by Intel i7 processor
(3.8 GHz) and 16 GB of RAM, aided in graphics pro-
cessing by an Nvidia Jetson Nano card with 128 cuda
cores (1.4 GHz) and 4GB of RAM.
Codes developed in this work used a series of
python libraries, the standards Numpy, Scipy and
Matplotlib, for numerical and graphical functional-
ity. Koopman method was deployed using PyKoop-
man, neural networks were elaborated with PyTorch,
while reinforcement learning simulations it used Gym
and Stable-Baselines3. The topological measures was
computed with Nolds (Harris and et al, 2020; Virta-
nen and et al, 2020; Hunter, 2007; Paszke and et al,
2019; Sch
¨
olzel, 2019).
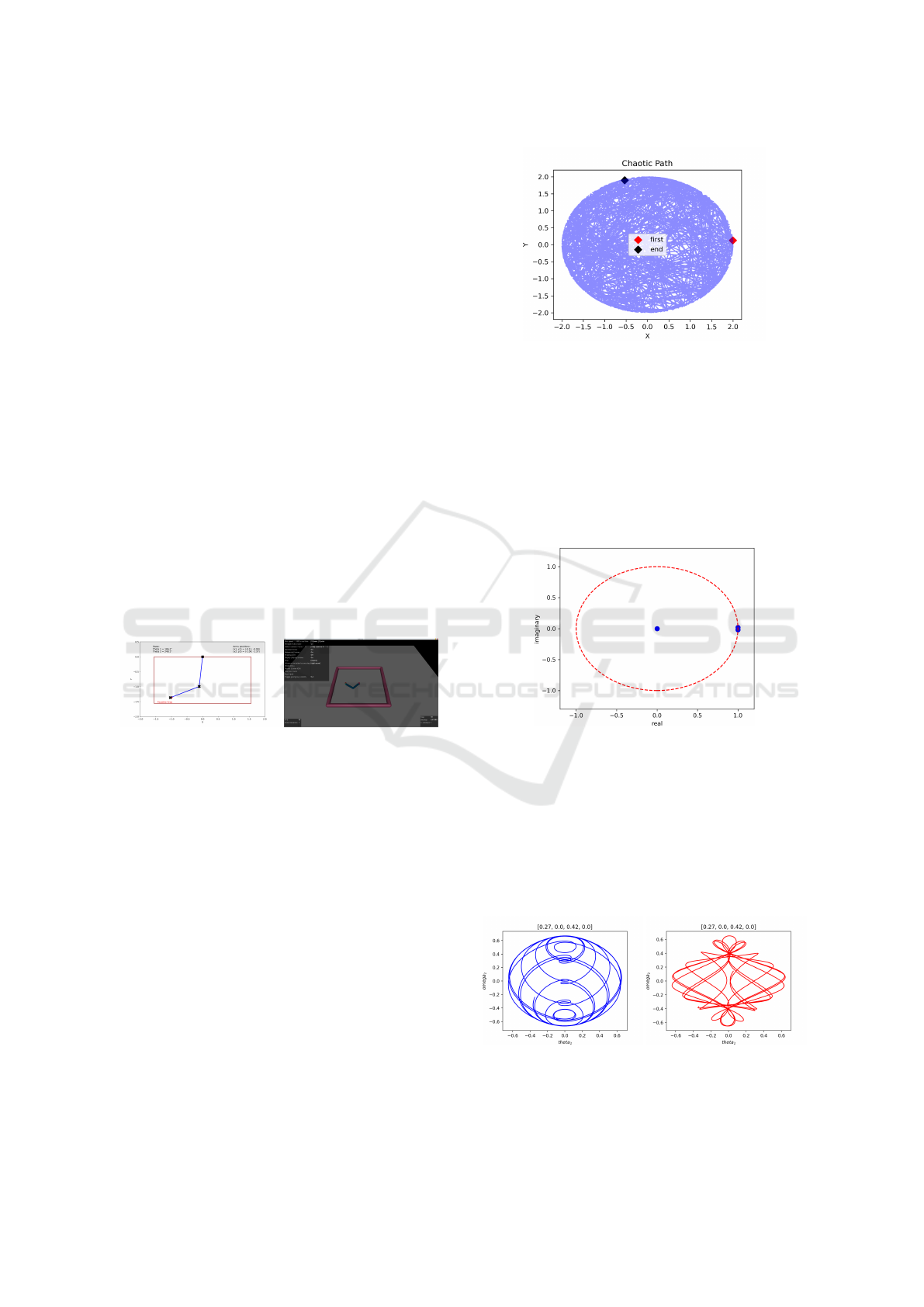
(A) (B)
Figure 2: Simulation environment used, (A) the first is an
elaboration with Numpy and Matplotlib. (B) The second is
called Reacher-v2, deployed in Gym using the Mujoco.
All trajectories that emulate the behavior of a
robotic arm were produced in two simulation envi-
ronments, the first (fig. 2-A) created by the authors
only with standard libraries, while the figure B was
elaborated into Gym library (with Mujoco (Todorov
et al., 2012)); in both there is a area that delimits the
target’s position.
Movement of both emulators results in chaotic
paths that start at the initial position of the robotic arm
until it finds the target, whose position constitutes the
final point, as is showed in figure 3.
7.2 Koopman Operator
Simulations referring to the Koopman method use nu-
merical solutions of the double pendulum like input,
Figure 3: Representation of a not optimized and chaotic
path generated by arm’s movement, simulated with double
pendulum equations.
computed with the Scipy module, from these trajecto-
ries and using PyKoopman module one can determine
the matrix corresponding to the operator.
Koopman eigenvalues are demonstrated in figure
4, which indicate that the eigenvectors neither grows
nor decay, that is, operator is stable, once it’s in your
adequate form to make forecast calculus.
Figure 4: Koopman operator eigenvalues, three are on the
unit circle and one is approximately zero.
The results illustrated in figure 5 represent trajec-
tories in the state spaces for the second joint angle
(θ
2
) and its respective velocity (ω
2
). In figure 5-A is
the result of the numerical integration, with mass and
length equal to one and using the initial conditions:
[0.27,0.0, 0.42, 0.0]. The second figure (5-B) is the
prediction using the Koopman operator.
(A) (B)
Figure 5: State space corresponding to the angle and its ve-
locity of the second joint. In (A) is the numerical solution
and in (B) the prediction respective.
ICEIS 2022 - 24th International Conference on Enterprise Information Systems
598
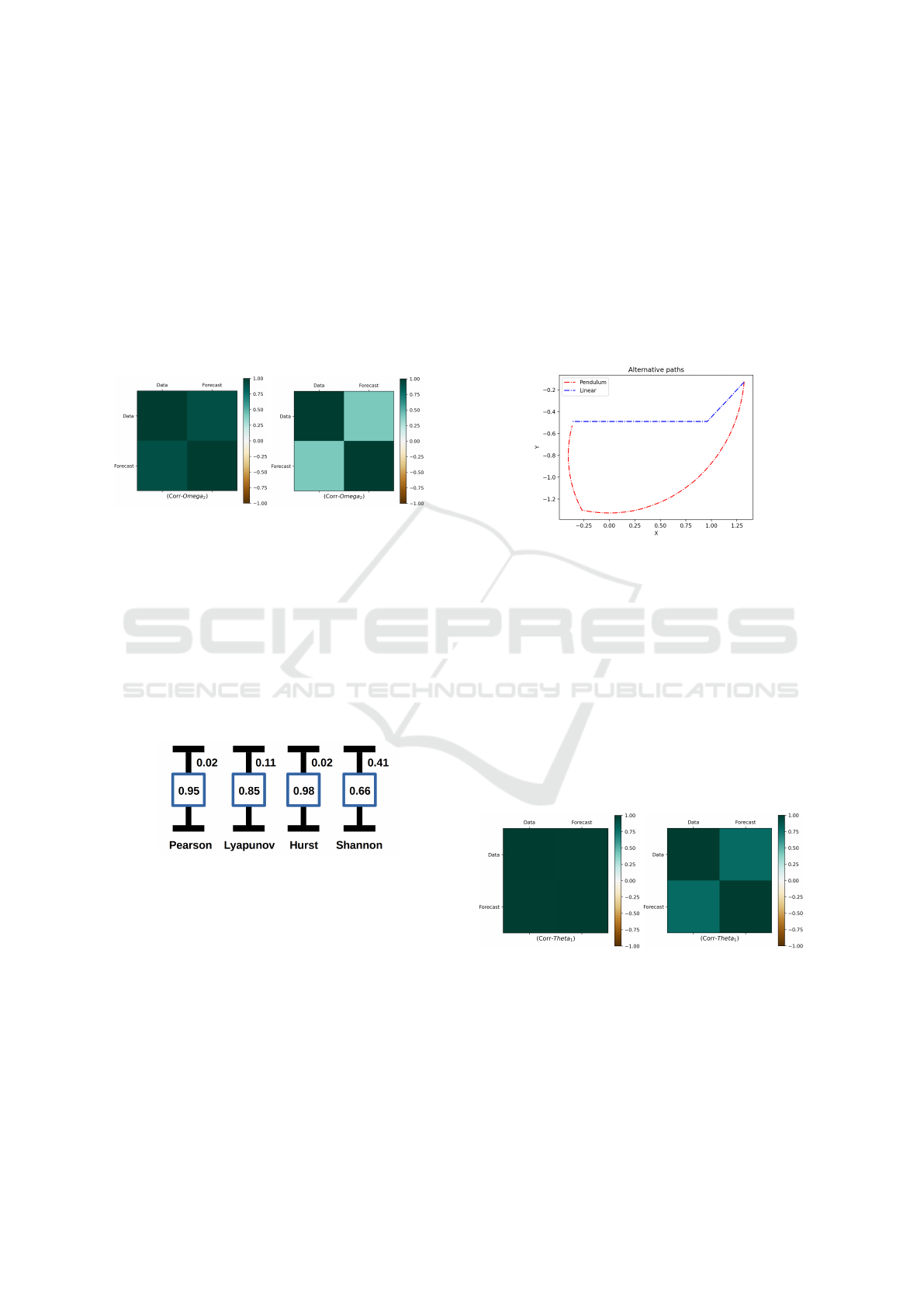
The Pearson correlation coefficient for these two
state space trajectories is 0.94 (high), which indicates
a strong coherence between these curves, furthermore
is possible illustrate this result using a correlation ma-
trix (figure 6).
A particular result like the one illustrated in fig-
ure 6-A can lead to wrong conclusions, then is impor-
tant to remember that a chaotic system is sensitive to
the initial conditions, as demonstrated by figure 6-B,
which is presented a correlation matrix for the system
that starts at [−0.32,0,0.64,0]. In this case the Pear-
son coefficient is 0.36.
(A) (B)
Figure 6: (a) Correlation matrix for the trajectories illus-
trated in figure 5. (B) Correlation matrix for trajectories
with other initial conditions.
The curve with lowest Pearson coefficient, pre-
sented a Hurst coefficient of 0.93 for the actual data
and 0.94 for forecasts. The Shannon entropy for
the real data was 0.11 and for the predictions 0.15,
and finally the Lyapunov exponent in both cases was
slightly positive, confirming the chaotic nature of this
system.
Figure 7: Normalized means and errors referring to topo-
logical and statistical measures.
An assemble to evaluate the data roughness was
elaborate from a sample with fifty arbitrary initial
conditions, which was used to measure the efficiency
of the Koopman method, the statistical results are il-
lustrated in figure 7.
Analyzing the figure 7, was observe that Pearson
correlation coefficient is positive and presents a error
(standard deviation) of 2%, while the Lyapunov expo-
nent presents a error of 11%, less stable. Hurst coef-
ficient is very stable, with same error that the Pearson
coefficient, lastly the Shannon entropy was the more
unstable, with a big error of 40%, which differs from
previous results.
7.3 Reinforcement Learning
To perform the reinforcement learning method, a dis-
crete state space was elaborated considering fixed an-
gle step (dθ = 0.04) for each pendulum joints (θ
1
, θ
2
),
then a Q-table was determined, which induced to the
deploy of a space engine (DC motor) with constrains
movements, like a pendulum (fig. 8), thus emulating
a deterministically programmed automaton system.
Figure 8: Trajectories for a robotic arm using reinforcement
learning (Linear/Blue) and the path like make by a DC mo-
tor (Pendulum/Red).
In each simulations was used the environment
called Reacher-v2, implemented in the Gym frame-
work (using Mujoco library), as this system is a con-
tinuous state space the SAC model was selected, so
that the SAC3 method, also deployed in this frame-
work, can be used too.
Neural network associated with reinforcement
method (SAC) was trained with 106 steps (workouts),
during this process were observed a convergence in
loss function from 20% of the training, then (1000)
tests were performed with 100% accurate results.
(A) (B)
Figure 9: Correlation matrix for the trajectories of rein-
forcement learng, with (A) high and (B) low coherence,
considering different initial conditions.
Similarly to the Koopman method, in this case the
Pearson coefficient presented a small variation (1%),
thus demonstrating a strong coherence in the trajecto-
ries generated by this method; the others topological
A Performance Benchmark of Formulated Methods for Forecast or Reconstruct Trajectories Associated to the Process Control in Industry
4.0
599

measures are shown in figure 10.
Figure 10: Normalized means and errors for topological and
statistical measures.
The Hurst coefficient in this case varied more than
in Koopman method, between 0.85 to 0.92, i.e. 7%, as
illustrated in figure 10. Shannon entropy varied less
than before, around 11%, from 0.71 to 0.78. Lastly,
Lyapunov exponent again presented positives values,
but with the biggest error, around 15%. Overall, this
method performed better than the Koopman method.
7.4 Decoder Neural Network
The last method analyzed is a decoder neural network,
used to build trajectories from matrices that represent
the initial states, in this case the target and robot arm
positions:
X
target
Y
target
X
arm
Y
arm
(8)
This initial matrix is firstly flattened to one order
tensor, then passed through a neural network with 6
hide layers, the last one being an output with 3969
values. The output then goes through a process of
unpolishing and reshape for a 128x128 matrix, which
represents the trajectory predicted (fig. 11-B).
(A) (B)
Figure 11: (a) Original pendulum trajectory, path from arm
(initial) to the target. (B) Results of the decoder neural net-
work after your training, with the same initial conditions.
In network training 5000 data were used, the su-
pervised learning was performed with one thousand
epochs and the loss function converged with approxi-
mately 600 steps. Next, the decoder then transformed
matrices like (8) in images as the figure 11-B, which
turn represent original pendulum trajectory, like illus-
trated in figure 11-A.
Fifty tests was performed using this neural net-
work, the results were further processed so that we
could determine the topological measurements; us-
ing the trajectories, predicted and original, was deter-
mined the topological measures for this method, thus
defining its ability to reconstruct paths in state space.
Figure 12: Normalized means and standard deviations for
topological and statistical measures.
Analyzing the results (fig. 12), can be observe
that the Pearson coefficient is positive and with a very
small error (2%). The other values also presented
small errors, the Shannon entropy with a error of 18%
was the bigger. Lyapunov exponent and Hurst coeffi-
cient with 1% and 7% respectively, deviated less then
10%, which confirm the effectiveness of this method.
8 CONCLUSIONS
According to the results presented in the previous fig-
ures, it can be concluded that the topological measure-
ments showed that the methods evaluated are effec-
tive and despite the amplitude of the results the errors
were generally moderate.
Looking at figures 7, 10 and 12, it is worth not-
ing that the average Pearson coefficient in all cases
is positive, indicating coherence between the original
and predicted curves. The errors of the other measure-
ments corroborate this statement, except for Shannon
entropy, which always exceeds 10%.
The chaoticity of this system justifies the discrep-
ancies that occurred, it should still be noted that the
decoder neural network results were excellent, how-
ever this benchmark does not intend to point out the
best method.
Finally, as all methods were effective, it can be
concluded that all these are able to reconstruct a tra-
jectory for machine learning, thus stimulating their
association.
ICEIS 2022 - 24th International Conference on Enterprise Information Systems
600

REFERENCES
Akin, E. (2010). The general topology of dynamical sys-
tems. American Mathematical Society, Rhode Island,
USA.
Almazova, N., Barmparis, G. D., and Tsironis, G. P. (2021).
Analysis of chaotic dynamical systems with autoen-
coders. Chaos: An Interdisciplinary Journal of Non-
linear Science, 31.103109:1–10.
Beyn, W.-J. (1991). Numerical methods for dynamical sys-
tems. Advances in numerical analysis, 1:175–236.
Broomhead, D. S. and et al (2020). Singular system analysis
with application to dynamical systems. Chaos, noise
and fractals, pages 15–27.
Bruder, D., Remy, C. D., and Vasudevan, R. (2019). Nonlin-
ear system identification of soft robot dynamics using
koopman operator theory. 2019 International Confer-
ence on Robotics and Automation. IEEE, pages 6244–
6250.
Champion, K. and et al (2019). Data-driven discovery of co-
ordinates and governing equations. Proceedings of the
National Academy of Sciences, 116.45:22445–22451.
Clark, G. (2014). The industrial revolution. Handbook of
economic growth, 2:217–262.
Haddad, W. M. and VijaySekhar, C. (2011). Nonlinear
dynamical systems and control. Princeton university
press, New Jersei, USA.
Harris, C. R. and et al (2020). Array programming with
numpy. Nature, 585:357–362.
Hauser, M. and et al (2019). State-space representations of
deep neural networks. Neural computation, 31:538–
554.
Hunter, D. (2007). Matplotlib: A 2d graphics environment.
Computing in Science & Engineering, 9.3:90–95.
Kaelbling, L. P., Littman, M. L., and Moore, A. W. (1996).
Reinforcement learning: A survey. Journal of artifi-
cial intelligence research, 4:237–285.
Koopman, B. O. (1931). Hamiltonian systems and transfor-
mations in hilbert space. Proceedings of the National
Academy of Sciences, 17.5:315–318.
Levi, D. and Winternitz, P. (1996). Symmetries of discrete
dynamical systems. Journal of Mathematical Physics,
37.11:5551–5576.
Li, Q. and et al (2017). Extended dynamic mode decom-
position with dictionary learning: A data-driven adap-
tive spectral decomposition of the koopman operator.
Chaos: An Interdisciplinary Journal of Nonlinear Sci-
ence, 27.103111:1–10.
Materassi, D. and Innocenti, G. (2010). Topological iden-
tification in networks of dynamical systems. IEEE
Transactions on Automatic Control, 55.8:1860–1871.
Mezi
´
c, I. (2013). Analysis of fluid flows via spectral proper-
ties of the koopman operator. Annual Review of Fluid
Mechanics, 45:357–378.
Montgomery, D. C., Runger, G. C., and Hubele, N. F.
(2009). Engineering statistics. John Wiley & Sons,
USA.
Nise, N. S. (2020). Control systems engineering. John Wi-
ley & Sons, New York, USA.
Otto, S. E. and Rowley, C. W. (2019). Linearly recurrent
autoencoder networks for learning dynamics. SIAM
Journal on Applied Dynamical Systems, 18.1:558–
593.
Packard, N. H. and et al (1980). Geometry from a time
series. Physical review letters, 45.9:712–716.
Paszke, A. and et al (2019). Pytorch: An imperative style,
high-performance deep learning library. Advances in
Neural Information Processing Systems, pages 8024–
8035.
Prince, G. E. (1982). Lie symmetries of differential equa-
tions and dynamical systems. Bulletin of the Aus-
tralian Mathematical Society, 25.2:309–311.
Prisecaru, P. (2016). Challenges of the fourth industrial rev-
olution. Knowledge Horizons - Economics, 8.1:57–
62.
Proctor, J., Brunton, S. L., and Kutz, J. N. (2018). Gener-
alizing koopman theory to allow for inputs and con-
trol. SIAM Journal on Applied Dynamical Systems,
17.1:909–930.
Rodic, A. (2009). Automation and Control: Theory and
Practice. InTech, Rijeka, Croatia.
Salle, J. P. L. (1976). The stability of dynamical sys-
tems. Society for Industrial and Applied Mathematics,
Philadelphia, USA.
Sch
¨
olzel, C. (2019). Nonlinear measures for dynamical sys-
tems, volume 1ed. Zenodo.
Schmid, P. J. (2010). Dynamic mode decomposition of nu-
merical and experimental data. Journal of fluid me-
chanics, 656:5–28.
Stuart, A. and Humphries, A. R. (1998). Dynamical systems
and numerical analysis. Cambridge University Press,
Cambridge, UK.
Sutton, R. S. and Barto, A. G. (2018). Reinforcement learn-
ing. Elsevier, Mountain View, USA.
Teng, Q. and Zhang, L. (2019). Data driven nonlinear dy-
namical systems identification using multi-step cldnn.
AIP Advances, 9.085311:1–8.
Todorov, E., Erez, T., and Tassa, Y. (2012). Mujoco:
A physics engine for model-based control. 2012
IEEE/RSJ International Conference on Intelligent
Robots and Systems, pages 5026–5033.
v. Neumann, J. (1932a). Zur operatorenmethode in
der klassischen mechanik. Annals of Mathematics,
33.3:587–642.
v. Neumann, J. (1932b). Zusatze zur arbeit ,,zur operatoren-
methode... Annals of Mathematics, 33.4:789–791.
Virtanen, P. and et al (2020). Scipy 1.0: Fundamental al-
gorithms for scientific computing in python. Nature
Methods, 17.3:261–272.
Williams, M. O., Kevrekidis, I. G., and Rowley, C. W.
(2015). A data–driven approximation of the koop-
man operator: Extending dynamic mode decomposi-
tion. Journal of Nonlinear Science, 25.6:1307–1346.
Xu, L. D., Xu, E. L., and Li, L. (2018a). Industry 4.0: state
of the art and future trends. International Journal of
Production Research, 56.8:2941–2962.
Xu, M., David, J. M., and Kim, S. H. (2018b). The fourth
industrial revolution: Opportunities and challenges.
International journal of financial research, 9.2:90–95.
A Performance Benchmark of Formulated Methods for Forecast or Reconstruct Trajectories Associated to the Process Control in Industry
4.0
601
