
Building, Controlling and Simulating We-Do Robots
Ahmed Wael
1
, Ghada Ahmed
1
and Nada Sharaf
2
1
The German University in Cairo, Egypt
2
The German International University, Egypt
Keywords:
WeDo, Robotics, Simulator, Programming, Children, Computational Thinking.
Abstract:
Robotics is now integrated in the STEM curricula for teaching mathematical concepts, mechanics, physics
and programming skills. However, the presence of the robots and hardware components is always a challenge.
It could be costly and in case of online learning, it is hard to use hardware elements. This is why there is
an increasing need of simulators that display the robot in different environments. Such simulators could pro-
vide feasible solutions. The work presented in the paper introduces “Let’s LEGO”, which is a simulator for
building and constructing robots, controlling them programmatically and seeing them in action based on the
Lego WeDo 2.0 electronic kit. The work presented in this paper builds on the current need of introducing
computational thinking to children from an early age. The goal of this project is to investigate methods for
developing a Simulator for creating and constructing robots, controlling them programmatically, and view-
ing them in operation. Let’s LEGO was evaluated by instructors responsible for teaching programming and
robotics to children in grades 2-4 (7+ years old). They reported that they thoroughly enjoyed the experience
and would like to include it in their teaching techniques. The aim is to strengthen how technology-mediated
learning may be used to provide a better and a more enjoyable learning experience to students with different
profiles.
1 INTRODUCTION
Around the world, educational reform is taking place,
and one of the foundations of the reform is the intro-
duction and integration of assistive technology meth-
ods into educational institutions. Motivated by the
possibility of higher economic, social, educational,
and technical advantages, both emerging and devel-
oped countries are implementing this reform, with a
strong emphasis on technology integration in educa-
tion. This research is part of a cluster aiming at exam-
ining how developing nations may absorb, adapt, and
utilize the information obtained by countries that have
already jumped on the bandwagon of technology as-
sistive methods’ integration in their own educational
systems.
Nowadays, we can witness the heavy use of tech-
nological devices by children either for educational or
entertainment purposes. It is inevitable to have them
play games, chat with their friends, have online meet-
ing or solve their homework using their computers
and smart phones. However, learning the true power
of those smart devices should be the desired goal for
our children. They should be the real producers rather
than being consumers.
”A computer is a bicycle for your mind” -Steve jobs.
In the previous quote, Steve jobs referred to the use
of computers to amplify the power of human brains.
This can be attained by learning how computers are
programmed. Programming teaches children how to
think differently and effectively. A programmer needs
to use logical thinking to be able to divide a large
problem and break it down into smaller conquerable
pieces in order to solve it effectively. This divide and
conquer process is called decomposition and is one
of the key features of computational thinking. Com-
putational Thinking (CT) is a collection of cognitive
abilities, habits, and methods that are necessary for
problem solving with a computer and should be in-
creasingly prevalent in education (Barr and Stephen-
son, 2011).
Enhancing the CT for children include some key
skills such as decomposition, pattern recognition, and
algorithmic design (Selby and Woollard, 2013). Lego
models can be a great way to teach children decom-
position, by showing them the final model and asking
them to figure out the steps needed. Lego models as
well can be of great use to teach students about pattern
recognition. They can use their building skills to ex-
plore the repeated patterns for similar parts of models.
376
Wael, A., Ahmed, G. and Sharaf, N.
Building, Controlling and Simulating We-Do Robots.
DOI: 10.5220/0011087300003182
In Proceedings of the 14th International Conference on Computer Supported Education (CSEDU 2022) - Volume 1, pages 376-382
ISBN: 978-989-758-562-3; ISSN: 2184-5026
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Pattern recognition is always an important skill for
teaching the looping concept in programming. Fol-
lowing the instruction manual for building a Lego
model as well gives an example for student on algo-
rithmic design. Thus, we can deduce how building
Lego models and programming them can contribute
in teaching students main aspects of Computational
Thinking in an enjoyable way. However, those kits
can be expensive and difficult to attain for personal
use (Cardoso et al., 2018). Moreover, with the current
Covid-19 situation, some parents prefer online learn-
ing which can be difficult when hardware (in our case
programmable Lego kits) are included. All of these
reasons were the main inspirations for Let’s LEGO.
The aim of this project is to investigate the feasibility
and applicability of creating a simulator for building
and constructing robots, controlling them program-
matically, and observing them in different environ-
ments. The work aims at building a simulator for the
well-known Lego Education WeDo 2.0 Robotics con-
struction set, aimed at children aged 7-9. The rea-
son behind that was the lack of presence of any (free)
simulators for this specific version of the Lego Educa-
tional Kits, to the best of our knowledge. The WeDo
set is simple yet versatile, making it a great candidate
to teach children robotics and programming (Useng
¨
ul
and Bahc¸eci, 2020).
The paper is organized as follows: Section 2 in-
troduces some related work. Section 3 shows more
details about let’s LEGO. The experimental design is
introduced in Section 4. We finally conclude with di-
rections to future work.
2 RELATED WORK
This section discusses virtual prototyping for the lat-
est Lego Mindstorms robot, the EV3. Lego Mind-
storms is a platform that allows users to operate a
programmable and customizable ’brick.’ This brick
serves as the control center and power station for the
robot and is compatible with a variety of extra con-
nectable modules for a variety of purposes, such as
LEDs, motors, colour sensors, and buttons. These
sensors and actuators can be controlled by creating
code and uploading it to the brick. As of 2013, the
Mindstorms EV3 is the third and most recent addition
to the Mindstorms family, and its software includes an
upgraded brick that runs Linux locally (Cornelissen,
2019).
The Mindstorms series has proven to be success-
ful in education, where it is used to teach program-
ming and computer science (Klassner and Anderson,
2003). However, there are some drawbacks to using
this type of instruction. Mindstorms robots are expen-
sive, making it difficult to provide each student with
their own robot. The frequent swapping of the robot
between students limits the amount of time available
for each student to actively work with it. Further-
more, working with Mindstorms might be inefficient
owing to the substantial effort required to upload code
to the brick on a regular basis. Given the popularity
of the Mindstorms series in education, as well as its
short comings, simulation software for the EV3 series
might be beneficial. As the fundamental idea behind
these robots is real-life interaction (driving around,
flashing LEDs, handling physical input, etc...), the
simulation component would be distinct from tradi-
tional virtual prototyping in that it would need a com-
pletely visual depiction of the brick and its linked
components (Cornelissen, 2019).
A real-world EV3 brick interfaces with its hard-
ware to set and retrieve variables based on software
execution (Cornelissen, 2019).
In the simulation, this concept must be repro-
duced. When programming languages are incompati-
ble, a dilemma arises: the simulation software is cre-
ated in Unity using C#, and Python is utilized to oper-
ate the simulated robot. One solution is to include an
interpreter within the simulation program, allowing
the simulated brick to run suitable code natively. A
more achievable approach is to develop a mechanism
to communicate between the simulation software and
a user-written application running on the same com-
puter (Cornelissen, 2019).
The idea of the work presented in the paper is
to provide an easy to use simulator for lego WeDo.
WeDo has proved to help in teaching children about
robotics and programming (Chalmers, 2018). It tar-
gets an age group that is younger than EV3. Since the
aim is to introduce programming and computational
thinking as early as possible, this was the motivation
to fill int he gap and provide a free simulator that can
allow children to learn about WeDo without having to
own a kit.
There is a difference between ‘input’ and ‘output’
values. The Python application assigns input values,
while the simulation retrieves result values. A LED
module’s ’Colour’ value counts as input, while an ul-
trasonic sensor’s ’Distance’ value counts as output.
The objective is to achieve structural equivalence be-
tween the simulation (in C#) and ev3dev2 in terms
of hardware modelling. In this manner, despite the
language barrier, a connection between the two pro-
cesses may be established. When this model is imple-
mented on the simulator side, it generates a ’virtual’
brick that represents the current state of the simulated
hardware. The simulation may then be performed us-
Building, Controlling and Simulating We-Do Robots
377

ing these variables. There is no locally saved repre-
sentation of the brick in Python. To retrieve and set
values, the re-implemented ev3dev2 methods interact
directly with the simulation. For Communication be-
tween the two processes, a generic framework must
be built. In this connection, the Python software that
is being executed (which is effectively replacing the
EV3 brick operating system) functions as the client,
while the emulated hardware acts as the server. The
link must first be established. This is accomplished
by a simple handshake in which the client provides its
name and the simulator responds with its own. The
communication can then begin (Cornelissen, 2019).
3 Let’s LEGO
This section provides a thorough overview of how
to build, operate, and simulate Lego robots virtually.
Unlike past researchers, the proposed approaches in-
volved physically constructing robots and replicating
them through bluetooth or cable. As a result, by vir-
tualizing it, many of the disadvantages of these ap-
proaches may be eliminated.
3.1 Let’s LEGO Engine
Let’s LEGO simulator is implemented on top of a
game engine. Unreal engine, CryEngine, and Unity
3D were among the possible game engines. Unity
1
is a well-documented game engine featuring 2D and
3D functionality, as well as a multi-platform editor
(Cornelissen, 2019). This editor includes all the tools
needed to create games and other interactive appli-
cations, such as physics and collision systems. In
conjunction with Unity, most developers code in C#
or JavaScript. Unity applications may be exported
to various platforms with similar functionality, in-
cluding Windows, macOS, Linux, Android, iPhone,
and many others. Unity employs what are known
as GameObjects. Different components have been
added to these GameObjects. Components hold data
about parameters like position, rotation, physics, 3D
representation, and much more. Scripts may also be
added to a GameObject, allowing developers to con-
trol elements of that GameObject and other variables
through code (Cornelissen, 2019). With all of these
capabilities, Unity is the clear choice for implement-
ing the Lego robot simulator.
1
https://unity.com/
3.2 Flow of Let’s LEGO
In this Unity simulator, four scenes were developed,
each with a distinct purpose. Starting with the start
menu screen, moving on to building the Lego robot,
then a scene to control this built robot using code
blocks, and finally the simulation of the robot con-
trolled by the code blocks added in the previous scene,
which can be re-coded by returning to the control
scene, as shown in Figure 1. Throughout this paper,
each scene will be discussed in further detail, along
with scripts written in C# and integrated with them.
Figure 1: Flow of the Simulator.
3.3 Building The Robot Scene
The key purpose of Let’s Lego simulator is to make
the user interested and engaged as if they were actu-
ally creating a robot with a WeDo Construction Set.
A detailed review of creating the game environment,
the player, and the bricks with their associated scripts
is provided in this section.
3.4 Environment
The game’s environment has a directional light;
which is a sun-like object that gives light to the whole
area dependent on its rotation angle, which can be
CSEDU 2022 - 14th International Conference on Computer Supported Education
378

seen in Figure 2 and Figure 3. The ground is a plane
with a mesh collider linked to it to keep items above
it from falling. The scene’s main camera is set to be
attached to the player, giving the user a First-person
or Third-person perspective by zooming in or zoom-
ing out. This camera adjusts its direction and angle
dependent on the mouse movement in this 3D envi-
ronment, bringing it closer to the real-life, as seen in
Figure 4.
Figure 2: Directional Light with angle 45° (Daylight
Mode).
Figure 3: Directional Light with angle -2.8° (Night Mode).
Figure 4: 3
rd
Person View Camera.
3.5 Player
This scene contains a comprehensive examination of
the player’s animation, movement, and use in the con-
struction of the robot. The player was designed to of-
fer the user a sense of realism. To begin, the player is
a 3D model taken from a GitHub MIT-licensed source
(cit, a), which is made up of the head, hands, body,
chest, and legs as shown in Figure 5. Handles were in-
troduced to the player at each joint so that they could
be utilized in the animation phase when the Animator
is linked to the player. The player may move and jump
in two modes. The movement state has five states:
idle, forward run, backward run, left and right. Each
state includes a unique animation, such as tilting for-
ward or back, and left or right.
Figure 5: The Lego Player Model.
3.5.1 Lego Bricks
The Lego bricks are designed using Studio 2.0 (cit, b).
Studio 2.0 is a program that includes a library of 3D
Lego bricks of various sizes, forms and colors.Studio
2.0 was used to construct the 3D bricks required for
each model from the Lego models that is driven by a
motor.
3.6 Script
After the bricks were created, a script named Drag3D
was applied to each one. Drag3D is mostly done in
the update function, which is called once every frame.
It has a method that is invoked when the mouse is
pressed, and it places the GameObject in the same lo-
cation as when the mouse is pressed. It stays con-
nected to the mouse wherever it moves as long as it
remains down till it is linked to its attachment point.
The bricks are added one by one until the model is
complete. When the player is done with the model
building, the ”Next Step” button can be clicked to
move to the next scene.
3.7 Programming the Robot Scene
A thorough examination of how the blocks are pro-
grammed in order to generate the appropriate out-
put, as well as how these code blocks are connected,
moved, and copied, is provided in this section. WeDo
2.0 software is used to program an actual Lego model
after it has been built by linking code blocks with a
wire. Some blocks are in charge of the motor’s speed,
while others are in charge of the motor’s direction,
and yet others are in charge of the motor stopping or
changing direction, and so on. These programming
blocks are combined to produce a set of instructions
that are executed by the connected device. The final
result is displayed on a Lego model built with real
Lego components rather than virtual Lego parts.
3.7.1 Code Blocks
The code blocks were adopted from the WeDo 2.0
program in order to provide the user with the familiar
WeDo appearance and the same button design. The
Building, Controlling and Simulating We-Do Robots
379
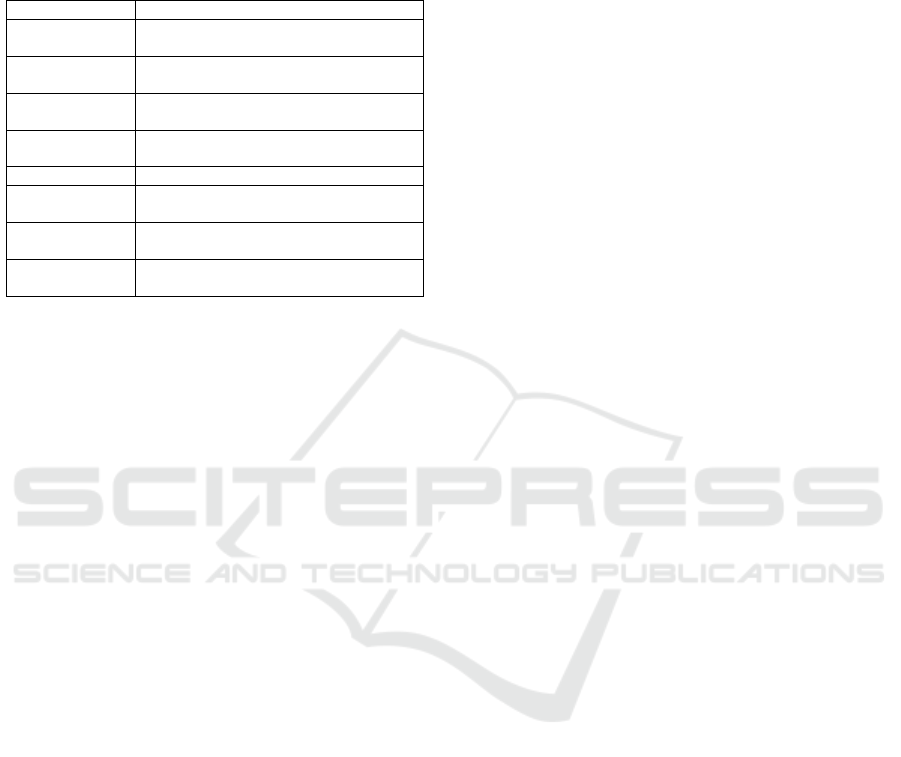
necessary buttons for the prospective code blocks,
summarized in table 1, are added on the screen, as
shown in Figure 6.
Table 1: Blocks Used (cit, c).
Block Name Description
Motor Power Sets the motor power to the specified level
and starts the motor.
Motor On For Starts the motor for a chosen amount of
time specified in seconds.
Motor Left Sets the motor to turn the axle clockwise
and starts the motor
Motor Right Sets the motor to turn the axle counter-
clockwise and starts the motor.
Motor Off Stops any movement of the motor.
Play Sound Plays a sound. The sound is chosen from a
list available within the software.
Wait For Use this block to tell the program to wait
for something to happen.
Start When used, always placed at the beginning
of a program string.
3.8 Scripts
Similar to Drag3D, a script named DragAndDrop was
made for the same object, and it is to be able to drag
the block using the mouse to the attachment point that
is added to each block in this scene when it is the
same as the block location. However, an extra item
is included in this script, and it is to instantiate a new
block of the same type if it is attached and above the
line -2 where the set of programming blocks are added
side by side.
The goal of this script, called ”CodeBlocksArray,”
is to create a sorted array with all the blocks arranged
from left to right. If the following set was connected
in the following order, Start - Motor Speed 8 - Wait 5
- Motor Speed 4 - Motor Left, the aim is to do these
movements in the same order each time. However, be-
cause the array is first generated by searching for ob-
jects with a specific tag, ”mygameobjects,” they are
added to an array in the order retrieved rather than
the order required. That is why array sorting is crit-
ical, since it uses the X position of the GameObject
(Block) from left to right to provide the correct result.
In order to transfer variables and data across scenes,
the sorted array is then transferred to another array in
another script named ”GameMaster” that is not de-
stroyed when the next scene is loaded. The sorted
array has now been sent and is ready to be utilized in
the final simulation scene.
3.9 Simulation Scene
The last scene of the simulator will be reviewed in this
section. The final scene for The Cooling Fan model is
about Max and Mia, two friends who are feeling over-
heated due to the hot weather and need some air from
the cooling fan, as seen in Figure 7. The code blocks
array is moved here, since the GameMaster script is
not destroyed when the scene is loaded. A script
named Simulator is created, and when run, it transfers
the components’ names from the GameMaster array
into a new array called ”steps.” It has two flags, one
for each blade of the Cooling Fan, which are used to
control whether the blades rotate or not. Each item
in ”steps” is tested to determine what should be done;
for example, if the item is Motor Stop, the two flags
are set to false, indicating that both blades will not
rotate.
4 EXPERIMENTAL DESIGN
4.1 Testing Procedure
The testing determines the effectiveness/likeliness of
the virtual robot simulator and if it can replace the real
robot construction. A test is conducted on prospective
instructors who are interested in instructing or assist-
ing youngsters to learn programming. These prospec-
tive instructors are well aware of the software’s bene-
fits and drawbacks, as well as the implications of uti-
lizing a tool like this with children. The major goal
of the testing is to determine if this tool can stand
on its own and offer the youngster with the entire
programming abilities supplied by robot building and
programming.
4.1.1 The Followed Method
The System Usability Scale (SUS) is a basic ten-
item likert scale that provides a global perspective
of subjective usability assessments (Brooks, 1986).
The standard SUS consists of the ten items (odd-
numbered items worded positively; even-numbered
items worded negatively) (Lewis and Sauro, 2009).
The test was held with 25 participants. 64% of the
participants were males and 36% were females of an
average age of 22.5. To ensure reliable results, those
who completed the survey were either graduated or
undergraduate engineers with a solid programming
experience. The sequence was as follows:
1. In an attempt to familiarize the participant with
Let’s LEGO, the user was given the opportunity
to be introduced to the program and start using it.
2. SUS was applied to the program, encompassing
the aforementioned survey items and adding a
question to evaluate the software’s dependability,
whether used alone or as an aid to the physical
one.
CSEDU 2022 - 14th International Conference on Computer Supported Education
380
Figure 6: Let’s Lego Code Blocks.
Figure 7: Max And Mia With The Cooling Fan.
4.2 Results
Figure 8 displays the average value for each question.
For odd-numbered questions, the higher values are
better, and vice versa for even-numbered questions.
The SUS formula was used to obtain the maximum,
minimum, and median values as shown in Table 2.
Figure 8: SUS Average Results.
Finally, after exploring all the functionalities Let’s
LEGO software, the participants were asked about the
Table 2: SUS Result.
Maximum
Value
100
Median Value 92.5
Minimum Value 77.5
possibility of relying solely on the software to provide
students with a sufficient understanding of building,
controlling, and simulating robots. 64% of the par-
ticipants chose “yes” as an answer, and the rest 36%
were not that sure, hence choosing “no”.
5 CONCLUSION & FUTURE
WORK
Educational robots proved to help students in different
STEM disciplines. They strengthen students’ creativ-
ity, programming skills, problem solving skills and
much more through the process of designing mod-
els, assembly and coding their functionalities. How-
ever, having those robots in classrooms with the suffi-
cient amount can be expensive and impractical some-
times, especially with the new urge of online learn-
ing in the COVID-19 situation. Let’s Lego aimed
at establishing a simulator for creating, constructing
robots, controlling them programmatically, and view-
ing them operating virtually in different scenarios and
environments. The process of building the simulator,
starting from the design to the implementation is all
discussed in detail throughout the paper. The simu-
lator was based on the well known WeDo construc-
Building, Controlling and Simulating We-Do Robots
381

tion kit, which has been widely used in robotics and
programming classes for children starting 5 years old.
Let’s Lego was tested with computer science instruc-
tors who are interested in teaching children. Based on
the preliminary results of the testing, the software can
be sufficiently dependable in teaching robotics classes
for children and provides the learner with a sufficient
grasp of building and programming a robot.
Looking forward, this research provides a good
starting point for different possibilities to extend the
work. First of all, the simulators need to provide all
the building models found in the WeDo software, so
that the student has a wide range of robots to con-
struct. Another aspect that can be added is an open en-
vironment to design and assemble any robot with dif-
ferent ranges of functionalities e.g. moving, lights and
sounds. Furthermore, adding different environments
for experimenting with the robot would be a good
idea. For example, after building a car, the student
can virtually try how it moves in the desert or a jun-
gle and experiment different mechanics and physics
rules. Finally, long-term experiments with students
and teachers in classrooms are needed to test the sys-
tem thoroughly.
REFERENCES
”legogame (mit licensed)”. Available online: https://github
.com/ditzel/LegoGame/blob/master/LEGO/Assets/O
bject/Character/figure.fbx. (accessed on May 2021).
”studio 2.0”. Available online: https://www.bricklink.com/
v2/build/studio.page. (accessed on May 2021).
”wedo user guide”. Available online: https://le-www-live-
s.legocdn.com/sc/media/files/user-guides/wedo/wedo
-user-guide-80b6e879549d1be595355dc8b6dee075
.pdf?la=en-us. (accessed on May 2021).
Barr, V. and Stephenson, C. (2011). Bringing computational
thinking to k-12: What is involved and what is the role
of the computer science education community? Acm
Inroads, 2(1):48–54.
Brooks, J. (1986). Smart phone applications for people with
brain injury. United Kingdom: Agency for Clinical
Innovation.
Cardoso, A., Ferreira, H. S., and Sousa, A. J. (2018). Pro-
gramming for young children using tangible tiles and
camera-enabled handheld devices. In 11th annual In-
ternational Conference of Education, Research and
Innovation.
Chalmers, C. (2018). Robotics and computational think-
ing in primary school. Int. J. Child Comput. Interact.,
17:93–100.
Cornelissen, L. (2019). Simulating lego mindstorms ev3
robots using unity and python. Radboud University
Nijmegen.
Klassner, F. and Anderson, S. D. (2003). Lego mindstorms:
Not just for k-12 anymore. IEEE robotics & automa-
tion magazine, 10(2):12–18.
Lewis, J. R. and Sauro, J. (2009). The factor structure of the
system usability scale. In International conference on
human centered design, pages 94–103. Springer.
Selby, C. and Woollard, J. (2013). Computational thinking:
the developing definition. Project report.
Useng
¨
ul, L. and Bahc¸eci, F. (2020). The effect of lego wedo
2.0 education on academic achievement and attitudes
and computational thinking skills of learners toward
science. World Journal of Education, 10(4):83–93.
CSEDU 2022 - 14th International Conference on Computer Supported Education
382
