
UAV Path Planning based on Road Extraction
Chang Liu
1a
and Tamás Szirányi
1,2 b
1
Department of Networked Systems and Services, Budapest University of Technology and Economics,
Műegyetem rkp. 3, Budapest, Hungary
2
Machine Perception Research Laboratory of Institute for Computer Science and Control (SZTAKI),
Kende u. 13-17, Budapest, Hungary
Keywords: Image Segmentation, Road Extraction, Weighted Path Planning, A Star Algorithm, UAV, SAR.
Abstract: With the development of science and technology, UAVs are increasingly being used and serving humans,
especially in the wilderness environment, due to their portability and the ease with which they can reach
places that are beyond human reach. In this paper, we present a technique for drones to help humans
intelligently plan routes in a field environment. Our approach is firstly based on road extraction techniques in
the field of image segmentation, using state-of-the-art D-LinkNet to extract roads from images captured by
real-time UAVs. Secondly, the extracted road information is analyzed, the set of main roads and that of the
secondary road are distinguished according to the width and the real-time road conditions on the ground, and
different weights are assigned to them. Finally, the A star algorithm is used to calculate a route plan with
weights based on the human-defined starting and ending points to obtain the optimal route. The results of our
task are the simulations on publicly available datasets to show that the method works well to provide the
optimal intelligent routes in real-time for people in the field.
1 INTRODUCTION
With the development of computer vision technology,
drone vision technology is increasingly used in
various fields of human life, providing convenience
for human daily activity. For example, in agriculture,
drones can help farmers to estimate the yield and size
of citrus fruits (Apolo, 2020); in the field of medicine,
the fleet of drones available for logistics to deliver
medical items (Ghelichi, 2021); in the field of disaster
relief, drones can detect fires (Moumgiakmas, 2021)
and floods (Rizk, 2022), and so on. In the field of
wilderness rescue, one of the biggest advantages of
drones is their flexibility, as they can easily reach
places that are inaccessible to humans, i.e. rescuers,
making the use of GPU-equipped drone vision
technology a viable option for rescue in difficult
environments in the field, especially where there is no
internet. The development of drone technology
allows for endless possibilities in the future, but of
course, we also have to take into account the
performance of the GPU we are equipped with and
a
https://orcid.org/0000-0001-6610-5348
b
https://orcid.org/0000-0003-2989-0214
the battery life, among other things (Galkin, 2019),
which are closely related. When it comes to the
wilderness, which can be accompanied by poorly
developed networks and roads that are not in good
condition, or even roads that are not included in
Google Maps (Ciepłuch, 2010), we consider the use
of flexible drone vision technology to provide
intelligent route planning for these people in the
wilderness. In addition to its flexibility, the images
captured by drones have a higher resolution than
those captured by satellites and are more practical in
people's daily lives, as they are still more accessible
and on time to humans than satellites, and they can
better serve people's lives. Based on our previous
work (Liu, 2021), drones can interact well with
humans in the wild and can recognize some hand
gestures, and communicate more easily.
This work proposes a method for UAVs to plan
intelligent routes in real-time for people in the wild
field. The desired usage scenarios and the
introduction diagram are shown in Figure 1. The
method mainly extracts map images from the real-
time video sequences captured by the UAV, converts
202
Liu, C. and Szirányi, T.
UAV Path Planning based on Road Extraction.
DOI: 10.5220/0011089900003209
In Proceedings of the 2nd International Conference on Image Processing and Vision Engineering (IMPROVE 2022), pages 202-210
ISBN: 978-989-758-563-0; ISSN: 2795-4943
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

them into three-channel fixed resolution images
through image processing techniques, these images
are used as input for the road extraction process,
outputs the road extraction results through D-LinkNet
(Zhou, 2018), and finally gives different weights for
intelligent route planning through road information
analysis. Combining weather information with road
information, it is important to assign weights to the
proposed roads to help humans avoid roads in bad
condition (e.g. muddy areas in the rain or snowy after
snowing, or sandy after sand-storm) and choose roads
in better condition. This is the starting point for
assigning weights to different roads of specific
conditions. Road information mainly includes road
width, road surface material, and the environmental
pollution covering the road surface (flood, mud,
rubble), estimated from satellite hyperspectral data
and the weather conditions. Generally speaking,
large, spacious roads are in better condition than
small, narrow roads on rainy days, and roads with
asphalt surface material are in better condition than
soil roads. Hyperspectral images’ classification
seems to offer a solution for the detection of road
material (Hong, 2020). Hyperspectral images can also
be used to classify and determine the condition of
roads (Mohammadi,2020). Some fusion of satellite
hyperspectral images with UAV RGB images are
used to detect the constituent materials of the road
surface (Jenerowicz, 2017). The fusion technique is
also used very successfully in other areas
(Maimaitijiang, 2017). In the weather stations in the
map, we can get information on the amount of
precipitation in the area and thus determine the
muddy, flooded, snowy, or sandy state of the soil or
soil roads or contaminated or spilled with soil based
on the amount of precipitation. (Kim, 2021) provides
a viable solution for predicting road conditions in
rainy weather using artificial neural networks. Soil
properties (Ben-Dor, 2002) can also be obtained by
imaging spectroscopy (Ben-Dor, 2009). All of the
above provide a firm basis for the road weighting
process.
Figure 1: Desired usage scenarios and the introduction
diagram.
Another point worth mentioning is that for the
field environment, the network connection can
sometimes be poor, even if the user has downloaded
a map of the area in advance. For some unavoidable
reasons, such as those mentioned above, some
feasible roads in the field environment are not
included in the map, and the roads contained in that
map are not weighted with information, so it is not
possible to plan an intelligent route in real-time, but
the user can provide us with the departure location
and destination, and we input the two coordinate
points on this map into the A star algorithm of (Cui,
2012) and use the weights to perform a route search.
An optimal route with good road conditions can then
be quickly fed back to the user. If there is no road, we
can generate paths, as tracks through the terrain,
estimating the “road” usability from the UAV-based
scanning and searching for tracks, and the
hyperspectral soil evaluation from earlier satellite
data for these paths.
2 BACKGROUND
2.1 Related Dataset and Assumptions
We test our proposed approach to intelligent road
route planning on the DeepGlobe Road Extraction
dataset (Demir, 2018), which is publicly available and
consists of 6226 training images, 1243 validation
images, and 1101 test images. Each RGB image has
a resolution of 1024 * 1024. Roads in this dataset are
labeled as foreground and other objects are labeled as
background. The imagery has 50cm pixel resolution,
collected by DigitalGlobe's satellite (PGC, 2018).
This also means that each picture corresponds to an
actual true distance of 512 m * 512 m, and each
picture covers an area of 262,144 m
2
. Specific
satellite information for data collection is shown in
Table 1, which shows the satellite's altitude, sensor
resolution, dynamic range, and other information. In
Table 1, in addition to the satellite data Word-View 1
used for the collection of the above public dataset,
information on Word-View 3 is shown as it provides
30cm panchromatic resolution and 1.24m
multispectral resolution which can be used for
pavement soil information estimation.
UAV Path Planning based on Road Extraction
203

Table 1: DigitalGlobe Satellite (PGC, 2018).
Satellite
Specifications
WorldView-1 WorldView-3
Launched: 2007 2014
Operational
Altitude:
496 km 617 km
Spectral
Characteristics:
Panchromatic
Panchromatic +
8 Multispectral +
8 SWIR + 12
CAVIS
Sensor
Resolution:
50 cm GSD at
nadir
31 cm GSD at
nadir
Dynamic Range: 11-bits per pixel
11-bits per pixel,
14-bits per pixel
SWIR
Swath Width: 17.7 km at nadir 13.1 km at nadir
Capacity: 1.3 million km
2
680000 km
2
per day Stereo
Collection:
Yes Yes
The dataset mentioned above was collected by
satellite and, considering the practical applicability
and implementation ability for real-life humans, we
also tested it on an open-source dataset provided by
senseFly UAV (SenseFly, 2009). This is an example
dataset of a small Swiss village called Merlishachen.
The imagery was collected during a single eBee
Classic drone flight. The number of images in this
dataset is 297, each image is (4608*3456*3), and
other specific information is given in Table 2.
Table 2: eBee Classic drone dataset (SenseFly, 2009).
Technical data
Ground resolution Coverage Flight height
5 cm (1.96 in)/px
0.57 sq. km
(0.22 sq. mi)
162 m (531.4 ft)
The hypothetical scenarios set for this study are
as follows:
The user is in a wild and uninhabited
environment, preferably after rainy or
otherwise bad weather.
Even if the user is in a place with poor or no
internet connection, the user can provide the
drone with its preferred starting and ending
coordinates via a previously downloaded map.
It can be done through a WiFi connection or by
using hand gestures (Liu, 2021).
The drone has sufficient range onboard and
with a sufficiently charged battery.
Except in the case of fog or other conditions
that obstruct the drone's view.
2.2 Proposed System
The overall flow chart of this system is shown in
Figure 2, the input is the real-time video sequence
captured by the UAV camera, which flies at a high
altitude in the sky. The captured video sequence is
segmented into images by frame. The RGB image
obtained is turned into a three-channel image with a
resolution of 1024*1024 after image processing, at
this time the data preparation work is completed. The
next step is to input the processed images into D-
LinkNet for road extraction. The extracted part of the
image with the road labeled as foreground and other
objects are labeled as background.
By combining this with the original RGB image
and other supporting data, we weigh the extracted
roads, where the main considerations are the width of
the road, the connectivity of the road, and the material
of the road. We mark the roads in good condition as
green, meaning that the road is in better condition
than the rest and that humans walk faster than the rest
after rain. The rest of the roads that have not been
given green priority remain white. Most of the white
roads are very narrow and muddy after rainy, flooded,
snowy or sandy, and are not suitable for humans to
walk on. As this paper is the basis of our current
research work, this section mainly presents ideas and
feasible solutions, and the implementation work will
be carried out in detail for the road weighting section
in the future.
Finally, according to the most commonly used A
star algorithm (Cui, 2012), we assign different values
to the green and white pixel parts and use the A star
algorithm to calculate the shortest and/or fastest path
from the start point to the endpoint, to provide the best
route for people in the field in any weather conditions,
like being after a muddy rain.
Figure 2: Flowchart of the proposed system.
IMPROVE 2022 - 2nd International Conference on Image Processing and Vision Engineering
204

3 METHODOLOGY
Figure 3 shows the key steps of this work: after the
video sequence is cut into images and image
processing in data preparation, the input RGB drone
image is passed through D-LinkNet's road extraction
(Zhou, 2018) to get the extracted road-map, next the
different results are shown, the right side is given the
green priority road with good condition and the left
side is the white normal road. For the results, the blue
circles are marked with the starting point and the
yellow circles with the destination, as shown by the
labels on the enlarged image.
Figure 3: Key steps and comparison of results.
3.1 Data Preparation and Road
Extraction Analysis
According to weather information, when bad weather
has passed, which means that some roads in the field
are muddy, flooded, snowy or sandy, GPU-equipped
drones can capture video in real-time from high
altitudes to provide route planning assistance to
humans in the air below that view. The video
sequence captured in real-time can be split into
different images according to the frame, which is an
RGB image, and then through image processing such
as resize, we can get a three-channel image of the
ground in the current state with a resolution of
1024*1024. This step is the data preparation stage. It
lays the foundation for the subsequent road extraction
and road condition analysis. The main purpose of this
process is to unify, different UAVs capture images at
different resolutions so the images are unified using
the data processing part. For example, the images in
dataset 2 will change from (4608*3456*3) to
(1024*1024*3) after this process and thus enter as
input into the subsequent processes of the system.
Figure 4 shows the processed RGB image input to
the road extraction network. D-LinkNet can perform
road segmentation well, labeling the roads as
foreground and the others as background. The grey-
scale image is combined with the original color map
for road analysis, where we mainly consider the width
of the road, the connectivity of the road, and the
material of the road surface, because generally
speaking if the road is spacious, well connected, and
made of asphalt, the road will be more suitable for
pedestrians or vehicles after muddy, flooded, snowy
or sandy weather. Conversely, if the road is narrow,
poorly connected, and composed of soil, such roads
can become muddy after heavy rainfall or snowy or
sandy weather. The pedestrians or drivers will find it
difficult to walk or drive on them. It is therefore
important to choose a road that is in good condition
after the bad weather to save some time and bring
convenience to humans. However, road-sections of
bad conditions can also be considered if it can connect
other road networks to make shortening of the path
with acceptable difficulties.
Figure 4: Road extraction, analysis, and marking of green
priority roads.
It is important to note here that the D-LinkNet
segmentation does not reach 100%, so there is a
difference between the results of the road extraction
and the real situation of the original image. For road
material detection, researchers (Hong, 2020) have
been able to identify asphalt and soil based on
hyperspectral image segmentation techniques,
although the two tasks are based on different data sets.
Hyperspectral images can also be used to classify and
determine the condition of roads (Mohammadi, 2020).
Last but not least, weather information is also
important and we can get relevant real-time and past
period weather information from the radar. The
weather information was downloaded by the scouting
UAV before starting into the wild. It can provide the
amount of precipitation in the area, and there are
precipitation values whose magnitude directly affects
the road conditions of the material is soil, so this
information coupled with the fusion of hyperspectral
imagery with drone imagery will be added to our
research work in the future. By combining these
elements, we can assign weights to the roads extracted
from the map in a very comprehensive way. And now
we compare only the original RGB image with the
segmented road grey image, which is given priority
based on the two factors of road connectivity and width
and is labeled as a green road, the rest remaining white.
UAV Path Planning based on Road Extraction
205

3.2 A Star Algorithm and Weighted
Route Planning
The A-star algorithm (Cui, 2012) is a heuristic search
algorithm for global path planning. It has been
successfully implemented and tested as a path
planning algorithm for mobile robots. The results can
be found in (Kuswadi, 2018). This algorithm uses a
combination of heuristic searching and searching
based on the shortest path. It is defined as the best-
first algorithm because each cell in the configuration
space is evaluated by the value:
(1)
where g(n) represents the cost from the starting
point to the current node; h(n) represents the
estimated cost from the current node to the ending
point; n is the current node.
The definition of a white node is a no-priority road
and the green node is the road with priority. Figure 5
shows the assignment of values for g(n) in different
pixel cases when the node is surrounded by white
pixels, which means the node without priority and be
accessible, then the point is the top and bottom left
and right nodes are each assigned a value of 100, the
diagonal length of the four points in the diagonal
direction of the node is 140. The other case, when the
node is surrounded by green pixel points, that is, with
priority access to the road, then the corresponding
value is reduced by a factor of 100, again when both
are present as shown in Figure 5, the algorithm gives
preference to the green node with a small loss value
since the minimum f- value is to be obtained. In
Figure 5, the leftmost plot shows that the pixel is on a
road that is not given priority and that the pixel is
surrounded by non-priority roads, the middle plot
shows that the pixel is on a road that is given priority
and that it is surrounded by pixels that are given
priority, and the rightmost plot shows a critical state
where the intersection of the two, the road that is
given priority and the road that is not given priority
We randomly select the top right two pixel points to
be labelled as priority roads and the rest as non-
priority roads, then the algorithm comes into play,
and this is where the assignment of values at the pixel
level in the g(n) function comes into play.
Figure 5: Different assignment of g(n) cost value to
different pixel points.
There are several well-known heuristic
mathematical functions h(n) that can be used
(Heuristics, 2019), the most commonly used are
Euclidean distance h
E
, Manhattan distance h
M
, or
Diagonal distance h
D
. In this work, we have chosen to
use the h
D
to calculate the diagonal distance with the
weighted modification:
(2)
(3)
(4)
(5)
∗,
∗,
(6)
Where (x
n
,y
n
) is the coordinate of the current node
n; (x
g
, y
g
) is the coordinate of the end node n; For
green cell d
1
=1 and d
2
=1.4 (octile distance), white cell
d
1
=100 and d
2
=140.
Put the 8 adjacent nodes of the starting point into
the open list and if the adjacent node is unreachable,
then remove this node from the open list. Using
Equation (1) to calculate the cost function formula for
the adjacent nodes, the one with the smallest f-value
is chosen as the next node and the previous nodes are
put into the closed list. The sequence continues until
the current node is the end position, and finally, a path
with the smallest f-value from the start to the end will
be found, which is the optimal path.
4 EXPERIMENTS
We tested the main part of this work on the publicly
available DeepGlobe Road Extraction dataset (Demir,
2018) and SenseFly dataset (SenseFly, 2009). We
also evaluated the time required for each phase of this
work. Three sets of experiments were carried out in
the DeepGlobe Road Extraction dataset and the
results can be found in Table 3 the three tests are
shown in Figure 6, Figure 7, and Figure 8. In these
figures, blue circles indicate the starting point, yellow
circles indicate the destination and the route is in red.
The route is pixel level, so we have intercepted a
portion of the map to zoom in on the results. For better
presentation, we have deepened the route color by
also labeling the 8 neighboring points near each pixel
of the route as red.
In the data preparation phase, the time required for
this part of the conversion of the live video sequence
IMPROVE 2022 - 2nd International Conference on Image Processing and Vision Engineering
206
captured by the UAV onboard camera into the input
image needed for the road extraction part is directly
related to the duration of the video sequence, in
general for a video with a duration of 17 seconds, the
real-time time required for data processing is 1.25
seconds, and the time required for road extraction by
D-LinkNet is about 5 seconds, followed by the
assignment of road priority, which will be extended
to be done automatically in the future, based on the
research of other researchers (Hong, 2020). We were
able to extract the two indices they had classified
well, namely asphalt and soil in the Pavia University
data set (Zhu, 2021), and assign road priority based
on the results of the road material classification and
road conditions. We also combine weather
information and soil information from the fusion of
satellite and drone imagery to carry out automatic
road weighting. The time required for the final route
planning is around 20 seconds, which is related to the
location of the starting point and ending point.
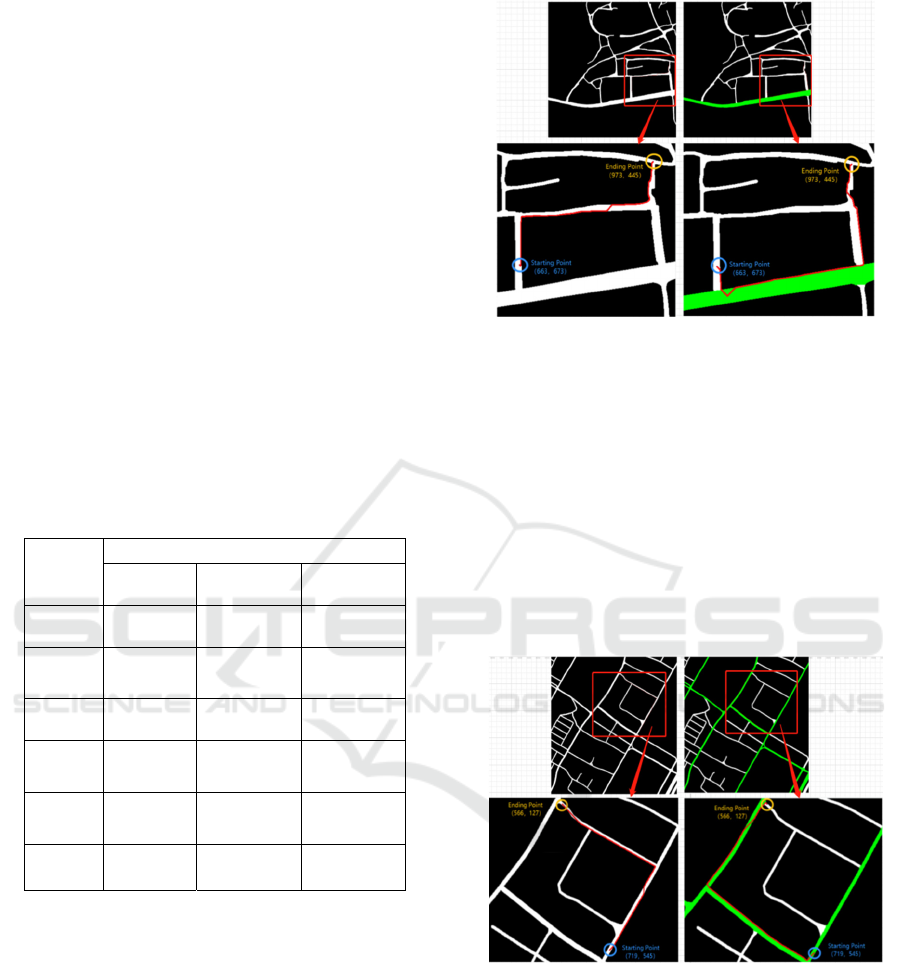
Table 3: Testing results on the DeepGlobe Road Extraction
dataset.
Table
Head
Comparison
Starting
point
Ending
point
f -value
Fig 6
(left)
(663,673) (975,445) 36110
Fig 6
(right)
(663,673) (975,445) 24436
Fig 7
(left)
(719,545) (566,127) 4733
Fig 7
(right)
(719,545) (566,127) 1004
Fig 8
(left)
(450,440) (890,264) 36230
Fig 8
(right)
(450,440) (890,264) 36230
In Figure 6, the starting point is at (663, 673) and
the ending point is at (975, 445). For the graph
without priority road assignment, the final f-value
from the starting point to the ending point is 36110
based on the A star algorithm, noting that the value of
f here only represents the cost value calculated under
a specific parameter setting and does not represent the
real length of the route, which is positively correlated
with each other. The relationship between them is
positive. On the right-hand side of Figure 6, when the
map has green roads, i.e. roads with priority, it is clear
that the route length increases, but the f-value
decreases, with a value of 24,436 and 32.3% less than
on the left-hand side. A smaller f-value means that the
user can reach the destination faster.
Figure 6: Test result 1 on the DeepGlobe Road Extraction
dataset (The right half comes with road priority, while the
left half does not).
Figure 7 shows the same experiment in another
map with the coordinates of (719,545) for the starting
location and (566,127) for the ending location. The
range of this experiment is smaller compared to that
of test 1 in Figure 6, which means that the place the
user needs to go is not very far away, it is nearby.
From the results in Figure 7, the f-value without road
priority is 4733 and the f-value with road priority is
1044, which is 78% lower than the former, which
largely helps the user to choose the best route.
Figure 7: Test result 2 on the DeepGlobe Road Extraction
dataset (The right half comes with road priority, while the
left half does not.).
Figure 8 shows another representative aspect of
the experiment, when the destination that the user
wants to go to and the priority path that can be
resorted to are in opposite directions, the results of the
experiment also show that the path with priority does
not come into play at this point, i.e. the two results are
the same, and from Figure 8 we can see that the
coordinates of the position of the starting point are
UAV Path Planning based on Road Extraction
207

(450,440). The position coordinates of the endpoint
are (890,264) and the value of f is the same in both
cases. Similarly, if the user is on a road in poor
condition, but his or her destination is close, or even
insight, then the user will certainly not take a detour
to a road in good condition to reach his or her
destination. The final decision depends on the
smallest f-value.
Figure 8: Test result 3 on the DeepGlobe Road Extraction
dataset (The right half comes with road priority, while the
left half does not).
As the main application of this system is for
UAVs rather than satellites, we also tested it in
dataset 2, and the results obtained are shown in Figure
9 and Figure 10. Figure 9 illustrates the change in the
size of the drone image from (4608*3456*3) to
(1024*1024*3) after basic image processing. After
D-LinkNet 's road extraction the greyscale image
containing the roads is obtained and finally, the
weighting of the roads is assigned. As the data images
collected for this dataset are small villages, in this
image unlike the satellite image above, where asphalt
roads are predominant, most of the roads are given
priority. The actual application environment is a
sparsely populated wilderness where the roads are not
in such good condition and the area covered is larger
than this.
Figure 9: Test result on eBee Classic drone dataset.
Figure 10 shows the results of route planning,
where the coordinates of the starting point are
(718,190) and the coordinates of the ending point are
(288,420). The left half represents the real-time route
planned when the road is not given priority, and the
final f-value obtained is 45250. In contrast, the right
half of Figure 12 shows the route planned for the
green road given priority, and the f-value obtained in
this case is 560, which shows that there is an
improvement of 98%.
Figure 10: Test result on eBee Classic drone dataset (route
planning).
5 DISCUSSION AND
CONCLUSION
This paper focuses on a project to provide users with
optimal route planning based on the latest road
extraction techniques, which are of interest in the
field after heavy rain or the strong snowing, or heavy
sandstorm contaminating the road surface. The
satellite hyperspectral info can address the
information of road conditions as the close
neighborhood soil, vegetation hiding, 3D info for
floods. Drones offer a great deal of flexibility, and
GPU-equipped drones can fly in the field in real-time
to provide some assistance to users in that
environment by WiFi or human gesture recognition.
The images captured by the UAV also have a high
resolution, and drone communicates more easily with
people than satellites. In this paper, we have tested
both on publicly available satellite images and on
smaller publicly available UAV images, both of
which achieved the desired results. The first step in
this work is to segment the live video sequence
captured by the UAV into a fixed pixel RGB three-
channel image. The next step is to input this map
IMPROVE 2022 - 2nd International Conference on Image Processing and Vision Engineering
208

image into D-LinkNet for road extraction, resulting in
a grey image with white-labeled as the road and the
rest black as the background. Finally, the roads are
given weight after some road analysis, where the road
information refers to the width, connectivity, and road
surface material. Roads with green pixels have
priority. The A star algorithm was used for route
planning and the results were compared between the
map image with priority roads and the map image
without priority roads.
This work also has some limitations due to the
presence of many assumptions in this work. For
example, the environment to which this work applies
would ideally be in the wild and after bad weather,
when some roads in the wild are in a very muddy,
flooded, snowy or sandy state unsuitable for human
walking. Next, we need to automate this part of the
road weighting process. Based on the weather
information provided by the weather stations on the
map, the amount of precipitation can be further
assessed. The value of precipitation directly affects
the road condition of a soil road in a field environment,
which is one of the factors to be considered. Secondly,
according to the mature hyperspectral classification
technology, we can choose to fuse hyperspectral
images of satellites and recent UAV RGB images to
extract the index of asphalt and soil, which is the
second point of the basis for weighting, and finally,
we can integrate the length and width information of
the segmented road to achieve the automated road
weighting. In the future, a comparative analysis of the
impact of different h(n) functions on route planning
will also be carried out, as well as some
improvements to the algorithm. In the end, we also
need to test this in the real world with GPU-equipped
drones rather than on publicly available datasets.
ACKNOWLEDGMENTS
The work is carried out at Institute for Computer
Science and Control (SZTAKI), Hungary, and the
authors would like to thank their colleague László
Spórás for the technical support. This research was
funded by the Stipendium Hungaricum scholarship
and China Scholarship Council. The research was
supported by the Hungarian Ministry of Innovation
and Technology and the National Research,
Development and Innovation Office within the
framework of the National Lab for Autonomous
Systems.
REFERENCES
Apolo-Apolo, O. E., J. Martínez-Guanter, G. Egea, P. Raja,
and M. Pérez-Ruiz. (2020)"Deep learning techniques
for estimation of the yield and size of citrus fruits using
a UAV." European Journal of Agronomy 115 126030.
Ghelichi, Zabih, Monica Gentili, and Pitu B. Mirchandani.
(2021) "Logistics for a fleet of drones for medical item
delivery: A case study for Louisville, KY." Computers
& Operations Research 135 105443.
Moumgiakmas, Seraphim S., Gerasimos G. Samatas, and
George A. Papakostas. (2021) "Computer vision for fire
detection on UAVs—From software to
hardware." Future Internet 13, no. 8 200.
Rizk, Hamada, Yukako Nishimur, Hirozumi Yamaguchi,
and Teruo Higashino. (2022) "Drone-Based Water
Level Detection in Flood Disasters." International
Journal of Environmental Research and Public
Health 19, no. 1 237.
Galkin, Boris, Jacek Kibilda, and Luiz A. DaSilva. (2019)
"UAVs as mobile infrastructure: Addressing battery
lifetime." IEEE Communications Magazine 57, no. 6
132-137.
Ciepłuch, Błażej, Ricky Jacob, Peter Mooney, and Adam C.
Winstanley.(2010) "Comparison of the accuracy of
OpenStreetMap for Ireland with Google Maps and Bing
Maps." In Proceedings of the Ninth International
Symposium on Spatial Accuracy Assessment in Natural
Resuorces and Enviromental Sciences 20-23rd July
2010, p. 337. University of Leicester, 2010.
Liu, Chang, and Tamás Szirányi. (2021) "Real-Time
Human Detection and Gesture Recognition for On-
Board UAV Rescue." Sensors 21, no. 6 2180.
Zhou, Lichen, Chuang Zhang, and Ming Wu. (2018) "D-
linknet: Linknet with pretrained encoder and dilated
convolution for high resolution satellite imagery road
extraction." In Proceedings of the IEEE Conference on
Computer Vision and Pattern Recognition Workshops,
pp. 182-186.
Hong, Danfeng, Lianru Gao, Jing Yao, Bing Zhang,
Antonio Plaza, and Jocelyn Chanussot. (2020) "Graph
convolutional networks for hyperspectral image
classification." IEEE Transactions on Geoscience and
Remote Sensing.
Mohammadi, M. (2012) "Road classification and condition
determination using hyperspectral imagery." Int. Arch.
Photogramm. Remote Sens. Spatial Inf. Sci 39 B7.
Jenerowicz, Agnieszka, Katarzyna Siok, Malgorzata
Woroszkiewicz, and Agata Orych. (2017) "The fusion
of satellite and UAV data: simulation of high spatial
resolution band." In Remote Sensing for Agriculture,
Ecosystems, and Hydrology XIX, vol. 10421, p.
104211Z. International Society for Optics and
Photonics.
Maimaitijiang, Maitiniyazi, Vasit Sagan, Paheding Sidike,
Ahmad M. Daloye, Hasanjan Erkbol, and Felix B.
Fritschi. (2020) "Crop Monitoring Using Satellite/UAV
Data Fusion and Machine Learning." Remote
Sensing 12, no. 9 1357.
UAV Path Planning based on Road Extraction
209

Kim, Sangyoup, Jonghak Lee, and Taekwan Yoon. (2021)
"Road surface conditions forecasting in rainy weather
using artificial neural networks." Safety science 140
105302.
Ben-Dor, E. (2002) "Quantitative remote sensing of soil
properties." 173-243.
Ben-Dor, E., Sabine Chabrillat, J. Al M. Demattê, G. R.
Taylor, J. Hill, M. L. Whiting, and S. Sommer. (2009)
"Using imaging spectroscopy to study soil
properties." Remote sensing of environment 113 S38-
S55.
Cui, Shi-Gang, Hui Wang, and Li Yang. (2012) "A
simulation study of A-star algorithm for robot path
planning." In 16th international conference on
mechatronics technology, pp. 506-510.
Demir, Ilke, Krzysztof Koperski, David Lindenbaum, Guan
Pang, Jing Huang, Saikat Basu, Forest Hughes, Devis
Tuia, and Ramesh Raskar. (2018) "Deepglobe 2018: A
challenge to parse the earth through satellite images."
In Proceedings of the IEEE Conference on Computer
Vision and Pattern Recognition Workshops, pp. 172-
181.
PGC. “DigitalGlobe Satellite Constellation – Polar
Geospatial Center.” Www.pgc.umn.edu, 20 Mar. 2018,
www.pgc.umn.edu/guides/commercial-
imagery/digitalglobe-satellite-constellation/. Accessed
27 Jan. 2022.
“Discover a Wide Range of Drone Datasets.” SenseFly,
www.sensefly.com/education/datasets/?dataset=1419
&sensors%5B%5D=24. Accessed 25 Jan. 2022.
Kuswadi, Son, Jeffri Wahyu Santoso, M. Nasyir Tamara,
and Mohammad Nuh. (2018) "Application SLAM and
path planning using A-star algorithm for mobile robot
in indoor disaster area." In 2018 International
Electronics Symposium on Engineering Technology
and Applications (IES-ETA), pp. 270-274. IEEE.
“Heuristics.” Stanford.edu, 2019, theory.stanford.edu/
~amitp/GameProgramming/Heuristics.html.
Zhu, Qiqi, Weihuan Deng, Zhuo Zheng, Yanfei Zhong,
Qingfeng Guan, Weihua Lin, Liangpei Zhang, and
Deren Li. (2021) "A Spectral-Spatial-Dependent
Global Learning Framework for Insufficient and
Imbalanced Hyperspectral Image Classification." IEEE
Transactions on Cybernetics.
IMPROVE 2022 - 2nd International Conference on Image Processing and Vision Engineering
210
