
Mechanism of Overfitting Avoidance Techniques for Training Deep
Neural Networks
Bihi Sabiri
1
a
, Bouchra El Asri
1 b
and Maryem Rhanoui
2 c
1
IMS Team, ADMIR Laboratory, Rabat IT Center, ENSIAS, Mohammed V University in Rabat, Morocco
2
Meridian Team, LYRICA Laboratory, School of Information Sciences, Rabat, Morocco
Keywords:
Data Overfitting, Machine Learning, Dropout, Deep Learning, Convolutional Neural Network, Max Pooling,
Early Stopping.
Abstract:
The objective of a deep learning neural network is to have a final model that performs well both on the data
used to train it and the new data on which the model will be used to make predictions. Overfitting refers to
the fact that the predictive model produced by the machine learning algorithm adapts well to the training set.
In this case, the predictive model will capture the generalizable correlations and the noise produced by the
data and will be able to give very good predictions on the data of the training set, but it will predict badly on
the data that it has not yet seen during his learning phase. This paper proposes two techniques among many
others to reduce or prevent overfitting. Furthermore, by analyzing dynamics during training, we propose a
consensus classification algorithm that avoids overfitting, we investigate the performance of these two types of
techniques in convolutional neural network. Early stopping allowing to save the hyper-parameters of a model
at the right time. And the dropout making the learning of the model harder allowing to gain up to more than
50% by decreasing the loss rate of the model.
1 INTRODUCTION
Overfitting is a concept in data science and a serious
problem in Deep neural networks with a large number
of parameters that are very powerfulmachine learning
systems (Hinton et al., 2012).
Deep neural networks contain multiple non-linear
hidden layers and this makes them very expressive
models that can learn very complicated relationships
between their inputs and outputs. With limited train-
ing data, however, many of these complicated rela-
tionships will be the result of sampling noise, so they
will exist in the training set but not in real test data
even if it is drawn from the same distribution. This
leads to overfitting and many methods have been de-
veloped for reducing it (Wu et al., 2022).
Early stopping is a method that seeks to pause
training before the model starts to overfit or before
learning the noise within the model(Yingbin et al.,
2021). This approach risks halting the training pro-
cess too soon, leading to the opposite problem of un-
a
https://orcid.org/0000-0003-4317-568X
b
https://orcid.org/0000-0001-8502-4623
c
https://orcid.org/0000-0002-0147-8466
derfitting. Finding the “sweet spot” between underfit-
ting and overfitting is the ultimate goal.
Dropout is another technique for addressing
this overfitting problem (Senen-Cerda and Sanders,
2020). Dropout is a powerful and widely used tech-
nique to regularize the training of deep neural net-
works (Xiaobo et al., 2021). The key idea is to ran-
domly drop units (along with their connections) from
the neural network during training. This prevents
units from co-adapting too much. During training,
dropout samples from an exponential number of dif-
ferent thinned networks. At test time, it is easy to
approximate the effect of averaging the predictions
of all these thinned networks by simply using a sin-
gle unthinned network that has smaller weights. This
significantly reduces overfitting and gives major im-
provements over other regularization methods.
But how is it possible to add malfunctions in the
learning of our machines to allow them to be more
efficient ?
In general, making errors in a program prevents
the program from functioning well but strangely if we
program a neural network then it is indeed desirable
to artificially create random bugs including the func-
tioning of the neurons of the network.
418
Sabiri, B., El Asri, B. and Rhanoui, M.
Mechanism of Overfitting Avoidance Techniques for Training Deep Neural Networks.
DOI: 10.5220/0011114900003179
In Proceedings of the 24th International Conference on Enterprise Information Systems (ICEIS 2022) - Volume 1, pages 418-427
ISBN: 978-989-758-569-2; ISSN: 2184-4992
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Well, to combat overfitting, we could simply seek to
have more training data, but suppose that we only
have access to the data that has been collected for us
and there, instead of seeking to collect more data, we
could try to create data from those that we typically
have if we want to learn to recognize cats from a car
image we can slightly rotate the zoom out of the zoom
small changes in the white balance or make a mirror
image of the photo in order to obtain new data which
we can still reasonably think of as images of cars, we
then speak of an increase in data or data augmenta-
tion.
In this article, we will take a closer look at
two techniques for addressing the overfitting problem
ealy-stopping and dropout. The rest of this paper is
organized as follows. In Section 2 we briefly compare
and position our solution with other proposals find in
the literature. Section 3 describes the problem han-
dled. In Section 4, we describe our proposed method
that can be potentially applied to convolutional neu-
ral network. Section 5 describes the Dropout Neu-
ral Network Model. Finally, we carry out extensive
experiments with standard datasets and different net-
work architectures to validate the effectiveness
2 STATE-OF-THE-ART
Without any attempt at being exhaustive, here we
point out a few connections between dropout and pre-
vious literature (Shaeke and Xiuwen, 2019) (Senen-
Cerda and Sanders, 2020) :
Sochastic Gradient Descent Method: The first de-
scription of a dropout algorithm was in (Hinton et al.,
2012) as an effective heuristic for algorithmic regu-
larization. The authors used the standard stochastic
gradi- ent descent procedure to train neuronal stall
networks on mini-batches of training cases, but they
modified the penalty term which was normally used to
keep weights from getting too big. At the time of the
test, they used the ”average network” which contains
all units hidden but with their the outgoing weights
have been halved to compensate for the fact that twice
as many of them are active. In practice, this gives very
similar performance to the average over a large num-
ber of dropout networks.
Regularized Dropout for Neural Networks: R-drop
is a simple yet very effective regularization method
built upon dropout, by minimizing the bidirectional
KL-divergence of the output distributions of any pair
of sub models sampled from dropout in model train-
ing (Liang et al., 2021). Concretely, in each mini-
batch training, each data sample goes through the for-
ward pass twice, and each pass is processed by a dif-
ferent sub model by randomly dropping out some hid-
den units. R-Drop forces the two distributions for the
same data sample outputted by the two sub models to
be consistent with each other, through minimizing the
bidirectional Kullback-Leibler (KL) divergence be-
tween the two distributions (Liang et al., 2021).
Implicit and Explicit Regularization. In a recent
work, (Wei et al., 2020) disentangle the explicit and
implicit regularization effects of dropout; i.e. the reg-
ularization due to the expected bias that is induced
by dropout, versus the regularization induced by the
noise due to the randomnessin dropout. They propose
an approximation of the explicit regularizer for deep
neural networks and show it to be effective in prac-
tice. Their generalization bounds, however, are lim-
ited to linear models and require weights to be norm
bounded (Arora et al., 2020).
3 PROBLEM DESCRIPTION
Overfitting is a concept in data science, which oc-
curs when a statistical model fits exactly against its
training data, but badly in the test set. When this
happens, the algorithm unfortunately cannot perform
accurately against unseen data, defeating its purpose
(IBM
Cloud Education, 2021). When machine learn-
ing algorithms are con- structed, they leverage a sam-
ple dataset to train the model. However, when the
model trains for too long on sample data or when the
model is too complex, it can start to learn the “noise,”
or irrelevant informa- tion, within the dataset. When
the model memorizes the noise and fits too closely
to the training set, the model becomes “overfitted,”
and it is unable to gen- eralize well to new data. If
a model cannot generalize well to new data, then it
will not be able to perform the classification or pre-
diction tasks that it was intended for. Low error rates
and a high variance are good in- dicators of overfit-
ting. In order to prevent this type of behavior, part of
the training dataset is typically set aside as the “test
set” to check for overfitting. If the training data has a
low error rate and the test data has a high error rate, it
signals overfitting. There are too many feature dimen-
sions, model assumptions, and parameters, too much
noise, but very few training data. As a result, the fit-
ting function perfectly predicts the training set, while
the prediction result of the test set of new data is poor.
4 HOW TO AVOID OVERFITTING
Much has been written about overfitting and the
bias/variance tradeoff in neural nets and other ma-
Mechanism of Overfitting Avoidance Techniques for Training Deep Neural Networks
419

chine learning models (Brownlee, 2018).
4.1 Early Stopping
Early termination is the default option for overfitting
prevention in ML programs. When premature termi-
nation is enabled, the loss of excluded data is mon-
itored during training, and it is terminated when the
loss improvement in the last iteration falls below a
given threshold. Since the excluded data is not used
during training, it represents a good estimate of model
loss on the new data. The behavior of the early stop-
ping is controled by the activation of early
stop option
(Maren et al., 2017).
There are three elements to using early stopping,
they are :
4.2 Training Model over a Predefined
Number of Epochs
This method is a simple method but risks stopping
the training early before reaching a satisfactory train-
ing point. With a higher learning rate, the model
could eventually converge with fewer epochs, but this
method requires a lot of trial and error. Due to ad-
vances in machine learning, this method is quite ob-
solete.
4.3 Stop When the Loss Function
Update Becomes Small
This approach is more sophisticated than the first be-
cause it relies on the fact that the gradient descent
weight updates become significantly smaller as the
model gets closer to the minima. Usually, the drive is
stopped when the update becomes as small as 0.001,
because stopping at this point minimizes loss and
saves computing power by preventing unnecessary
epochs. However, overfitting can still occur.
4.4 Overall Validation Strategy
This smart technique is the most popular early stop-
ping approach (see Figure 2) (Caruana et al., 2001).
To understand how this works, it is important to look
at how the training and validation errors change with
the number of epochs (as in Figure 2). The learn-
ing error decreases exponentially until the increasing
epochs no longer have such a large effect on the error.
The validation error, however, initially decreases with
increasing epochs, but after a certain point it begins
to increase. This is the point where a model should
be stopped early because beyond that the model will
start to overfit.
While the validation set strategy is the best in
terms of preventing overfitting, it usually takes a large
number of epochs before a model starts to overfit,
which can cost a lot of computing power. A smart way
to get the best of both worlds is to design a hybrid ap-
proach between the commit set strategy and then stop
when the loss function update gets small. For exam-
ple, training may stop when either is achieved.
4.5 Dropout
Dropout is a regularization technique for neural net-
works that drops a unit (along with connections) at
training time with a specified probability. Dropout
changed the concept of learning all the weights to-
gether to learning a fraction of the weights in the net-
work in each training iteration (Moolayil, 2019). It
significantly improve the performance of deep neu-
ral networks on various tasks (Hinton et al., 2012),
including vision problems (Krizhevsky et al., 2017)
and randomly sets hidden Unit activities to zero with
a probability of 0.5 during training. In Figure 1:
Left(a):All neurons are used during training of a
model. Right(b) : Dropout a simple way to prevent
neural networks from overfitting, When p = 0.5, each
neuron has a 50 in 100 chances of being turned off in
training.
(a) Full network (b) Network with Dropout.
Figure 1.
This issue resolved the overfitting issue in large
networks. And suddenly bigger and more accurate
Deep Learning architectures became possible (LeCun
et al., 2015).
Before Dropout, a major research area was regu-
larization. Introduction of regularization methods in
neural networks, such as L1 and L2 weight penal-
ties, started from the early 2000s (Bengio et al.,
2007). However, these regularizations did not com-
pletely solve the overfitting issue. The reason was
Co-adaptation.
ICEIS 2022 - 24th International Conference on Enterprise Information Systems
420
4.6 Co-adaptation in Neural Network
One major issue causing overfitting in learning large
networks is co-adaptation. So, in neural network, co-
adaptation means that some neurons are highly depen-
dent on others. If those independent neurons receive
“bad” inputs, then the dependent neurons can be af-
fected as well, and ultimately it can significantly al-
ter the model performance, which is what might hap-
pen with overfitting. In such a network, if all the
weights are learned together it is common that some
of the connections will have more predictive capabil-
ity than the others. In such a scenario, as the net-
work is trained iteratively these powerful connections
are learned more while the weaker ones are ignored.
Over many iterations, only a fraction of the node con-
nections is trained. And the rest stop participating.
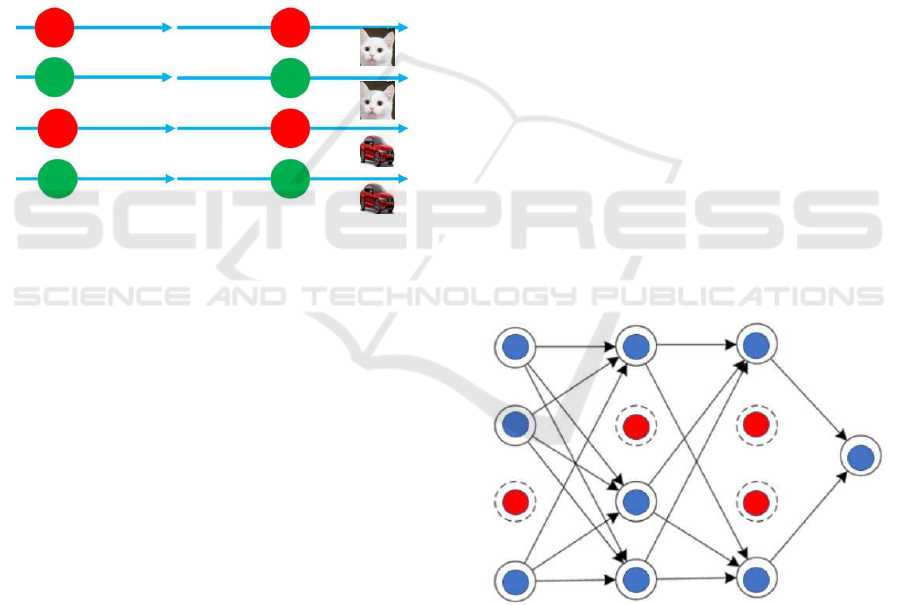
Figure 2: Co-adaptation of node connections.
In figure 2, the red circles are neurons that are
independent on others, the green one are the neu-
rons that are highly dependant on others. This phe-
nomenon is called co-adaptation. This could not be
prevented with the traditional regularization, like the
L1 and L2 (Ng, 2004). The reason is they also reg-
ularize based on the predictive capability of the con-
nections. Due to this, they become close to determin-
istic in choosing and rejecting weights. And, thus
again, the strong gets stronger and the weak gets
weaker. A major fallout of this was: expanding the
neural network size would not help. Consequently,
neural networks’ size and, thus, accuracybecame lim-
ited. Then came Dropout. A new regularization ap-
proach. It resolved the co-adaptation. Now, we could
build deeper and wider networks. And use the pre-
diction power of all of it. With this background, let’s
dive into the Mathematics of Dropout.
Model combination always improves the perfor-
mance of machine learning methods. With large neu-
ral networks, however, the obvious idea of averaging
the outputs of many separately trained nets is pro-
hibitively expensive. Combining several models is
most helpful when the individual models are different
from each other and in order to make neural net mod-
els different, they should either have different archi-
tectures or be trained on different data. Training many
different architectures is hard because finding optimal
hyperparameters for each architecture is a daunting
task and training each large network requires a lot of
computation. Moreover, large networks normally re-
quire large amounts of training data and there may not
be enough data availableto train differentnetworks on
different subsets of the data. Even if one was able to
train many different large networks, using them all at
test time is infeasible in applications where it is im-
portant to respond quickly.
Dropout is a technique that addresses both these
issues. It prevents overfitting and provides a way of
approximately combining exponentially many differ-
ent neural network architectures efficiently. The term
“dropout” refers to dropping out units (hidden and
visible) in a neural network. By dropping a unit out,
we mean temporarily removing it from the network,
along with all its incoming and outgoing connections,
as shown in Figure 1. The choice of which units to
drop is random.
In the simplest case, each unit is retained with a
fixed probability p independent of other units, where
p can be chosen using a validation set or can simply
be set at 0:5, which seems to be close to optimal for
a wide range of networks and tasks. For the input
units, however, the optimal probability of retention is
usually closer to 1 than to 0:5. ( The mathematical
aspect of the choice of these values will be treated
below in section 5)
Figure 3: Partial learning with random choice of inactive
neurons : color red are the neurons that are not used during
training.
This very simple technique which is dropout
which consists quite simply in programming the tem-
porary vulnerability of artificial neurons is in fact a
formidably effective technique to fight against over-
interpretation. Since it makes it possible both to
fight against the lack of learning data against errors
in learning data and against learning a single model
Mechanism of Overfitting Avoidance Techniques for Training Deep Neural Networks
421

rather than learning a whole forest in short, neural
balls are in fact very intelligent errors.
The Initialization Process, through the idea of
multi start, amounts to starting with several initial
neural networks whose initialization is random and
we can keep the best of our neural networks during
learning or perhaps even better.
5 DROPOUT NEURAL
NETWORK MODEL
This section describes the dropweak neural network
model (Srivastava N et al., 2014). Consider a neural
network with L hidden layers.
Let l ∈ {1, 2, . . . . . . L}
indexes the hidden layers of the network (Srivastava
N et al., 2014). Let z
l
denote the vector of inputs into
layer l, y
l
denote the vector of outputs from layer l (y
0
is the input vector of the neural network). W
l
and b
l
are the weights and biases at layer l. The feed-forward
operation of a standard neural network (Figure 4a) can
be described as
( for l ∈ {0, 1, 2, . . . . . . L− 1}
and any hidden unit i)
The training phase of the standard network with-
out dropout can be represented mathematically as:
Z
l+1
i
= W
l+1
i
∗Y
l
+ b
l+1
i
y
l+1
i
= f(z
l+1
i
)
where f is any activation function, for example
sigmoid function , f(x) =
1
1+e
−x
The dot product of the weights w
l+1
i
and the
input(y
l
) are added to a bias term(b
l+1
) and passed
through an activation function(f), to introduce non-
linearity to give the output y
l+1
, which is the predic-
tion, meaning all the neurons are involved in the mak-
ing of a decision.
During dropout, the training is updated to be-
come: (Figure 4b)
r
l
i
= Bernoulli(p)
ˆy
l
= r
l
× y
l
z
l+1
i
= w
l+1
i
haty
l
+ b
l+1
i
y
l+1
i
= f(z
l+1
i
)
The training is very similar to the standard net-
work, but a new term r which is a new neuron, is in-
troduced, which keeps the neuron active or turns it off,
by assigning a 1 ( neuron participates in the training)
or 0 (neuron does not participate or is turned off), then
the training process continues. This way, overfitting
(a) Full network (b) Dropout network.
Figure 4: Comparison of the basic operations of a standard
and dropout network.
is reduced and our model can now make excellent and
accurate predictions on real-world data (data not seen
by the model). At test time, the weights are scaled
as W(l)test = pW(l). The resulting neural network is
used without dropout.
6 EXPERIMENTAL SETUP AND
RESULTS
In this section, first, we confirm empirically that
hyper-parameters provide characterizations after a
certain number of iterations. In early stopping regu-
larization, we stop training the model when the per-
formance of the model on the validation set starts
to deteriorate, which decreases accuracy or increases
loss.
6.1 Experimental Results with
Stop-early
By plotting the error on the training dataset and the
validation dataset together, the errors decrease with a
number of iterations until the point where the model
begins to overfit. After this point, the validation er-
ror increases, but the training error still decreases.
So even though training continues after this point,
stopping early essentially returns the set of parame-
ters that have been used at this point and is therefore
equivalent to stopping training at this point. Thus, the
final parameters returned will allow the model to have
better generalization and low variance.
The model at the time when the training is stopped
will have a better generalization performance than the
model with the least training error. Early cessation
can be considered implicit regularization, unlike reg-
ularization through weight loss. This method is also
efficient because it requires less training data, which
is not always available. Because of this, early quitting
requires less training time compared to other regular-
ization methods. Repeating the early stopping process
ICEIS 2022 - 24th International Conference on Enterprise Information Systems
422

multiple times can lead to overfitting of the model to
the validation dataset, just as overfitting occurs in the
case of training data. The number of iterations taken
to train the model can be thought of as a hyperparam-
eter. Then the model must find an optimal value for
this hyperparameter for the best performance of the
training model.
Early stopping is a regularization technique for
deep neural networks that stops training when pa-
rameter updates bring no improvement over a valida-
tion set. Therefore, we store and update the current
best parameters during training, and when parameter
updates no longer produce improvement (after a set
number of iterations), we stop training and use the
latest best settings. It works as a regularizer by limit-
ing the optimization procedure to a smaller volume of
parameter space.
From the plot bellow (Figure 5) we can see that
without Early Stopping (Caruana et al., 2001) the
model continues to diverge after the optimal point
where the two errors are equal and if the process does
not stop the performance of the model will be further
degraded
Figure 5: Loss & Early Stopping checkpoint.
At this point the performance of the model is opti-
mal. EarlyStopping needs the validation loss to check
if it has decreased, and in this case it will make a
checkpoint of the current model
6.2 Experimental Results with Dropout
Experiments are conducted on three datasets :
MNIST (Etzold, 2022) , SONAR (Brownlee et al.,
2017) and Diabetes (Larxel, 2021).
In order to test the robustness of dropout, classifi-
cation experiments were done with networks of many
different architectures keeping all hyperparameters,
including p fixed. Figure 9a and 9b shows the test er-
ror rates obtained for these different architectures as
training progresses. The same architectures trained
with and without dropout have drastically different
test errors as seen as by the two separate clusters of
trajectories.
Dropout gives a huge improvement across all ar-
chitectures, without using hyperparameters that were
tuned specifically for each architecture. The algo-
rithm tested with some classification datasets gives
the results as indicated in Figure 6a and 9b : It illus-
trates accuracy and loss without Dropout on the left
and with Dropout on the right): The model is formed
of is formed of 7 hidden layers alternated by 6 dropout
layers with a percentage of 50%, i.e. p = 0.5, each
neuron has a chance in 2 to be deactivated. At each
epoch, this random deactivation is applied. That is,
with each pass (forward propagation) the model will
learn with a configuration of different neurons, the
neurons activating and deactivating randomly. This
procedure effectively generates slightly different pat-
terns with different neural configurations at each iter-
ation. The idea is to disrupt the characteristics learned
by the model.
Usually, model learning is based on the syn-
chronicity of neurons... with dropout, the model must
exploit each neuron individually, its neighbors can be
randomly disabled at any time. The Dropout is ac-
tive only during model training. In tests, each neuron
remains active and its weight is multiplied by proba-
bility p. With Keras & Tensorflow it is enough to add
a dropout layer is to indicate the desired probability
of deactivation.
It is true that dropout hinders performance, in
some way, since it suppresses neuron activations dur-
ing training. However, dropout is highly useful as a
regularization technique - since any one neuron has
a decent change of being ignored during one for-
ward pass, the neural network cannot rely strongly
on any one neuron. This has the effect of prevent-
ing overfitting and helping the neural network gener-
alize to examples it has never seen before, since it be-
comes harder to simply memorize training data with
this added suppression. This means that performance
is improved during inference/validation even if per-
formance during training is reduced. After training
is completed, however, dropout is generally removed
when the neural net is used for prediction.
According to the curve of the accuracy and that of
the loss of the Figure 6a, we can see that the predictive
model produced by the automatic learning algorithm
adapts well to the Training Set in the event of non-use
of dropout, which justifies an overfitting, because the
training data has a low error rate and a high accuracy.
while this adaptation is less remarkable when using
Mechanism of Overfitting Avoidance Techniques for Training Deep Neural Networks
423

(a) Without Dropout. (b) With Dropout.
Figure 6: Dropout slows down everfitting.
dropout.
Another example with different dataset (dia-
betes.csv, 2021) gives the results bellow [Figure 7a
and b]:
(a) Without Dropout. (b) With Dropout.
Figure 7: By using dropout layer test accuracy increased
from 0.75 to 0.81 while loss decreased from 81% to 45%.
In this example, unlike the previous case, we
represent the evolution of the precision for the test
sample with or without dropout and we see that if
the dropout is not used, the loss of test dataset in-
creases constantly ( 81% at iteration 100) whereas
with dropout it stabilizes around 45% at the same it-
eration. As for the accuracy of the test sample, it is
75% without dropout and 81% with dropout
In this third example, experiments are conducted
on MNIST which consists of 28x28pixel images with
1 channel. We use rectified linear function (Cerisara
et al., 2021) for dense layer and Maxpooling for con-
volutional and fully-connected layers, and softmax
activation function for the output layer.
The CNN (Iraji et al., 2021) architecture for
MNIST is 1x28x28, which represents a CNN with 1
input image of size 28x28, a convolutional layer with
6 feature maps and 5x5 filters, a pooling layer with
pooling region 2x2, a convolutional layer with 16 fea-
ture maps and 5x5 filters, a pooling layer with pool-
ing region 2x2, a fully-connected layer with 1000 hid-
den units, and an output layer with 10 units (one per
class).
We represent the evolution of the precision and the
loss for the training and test sample with or without
dropoutand we note that in the case where the dropout
is not used the accuracies of the dataset of training and
test diverge (Figure8), the same is true for the losses
of the 2 datasets which shows an overfitting, while
with dropout the accuracies and the losses converge
after ten iterations.
In this example, each hidden unit is randomly
omitted from the network with a probability of p ∈
[0.2, 0.5], so a hidden unit cannot rely on other hidden
units being present.
In the other example, the dropout technique con-
sists of to zero the output of each hidden neuron
with probabilities 0.25 on the first two layers, 0.5 on
the third and 0.25 on the last. The neurons that are
”dropped” in this way does not contribute to forward
passage and does not participate in backpropagation.
This way, each time an input is presented, the neu-
ral network samples a different architecture. Because
a neuron cannot count on the presence of other spe-
cific neurons. It is therefore forced to learn more ro-
bust features that are useful in conjunction with many
different random subsets of other neurons, which re-
duces co-adaptations of neurons. During the test, we
use all the neurons by multiplying their outputs by
the coefficients indicated above which is a reasonable
approximation for taking the geometric mean of the
predictivedistributions producedby the many dropout
networks.
From the figure 8 above (upper part), we can see
that the accuracy of the validation has almost become
stagnant after a few epochs. The accuracy grows lin-
early at the beginning and stagnates rapidly thereafter.
As for the loss of validation, the figure 8 (lower
part) shows that it decreases linearly at the beginning
to increase after a few epochs, which shows that it is
a sign of overfitting.
In this case, it is advisable to introduce some
dropoutin our model and see if that helps reduce over-
fitting.
Using the dropout, we can see that validation loss
and validation accuracy are both synchronized with
training loss and training accuracy , see Figure9. The
gap between the training and the validation accuracy
is very small, even if the validation loss and the accu-
racy line are not linear, it shows that the model is not
overfitting and the validation loss decreases when the
ICEIS 2022 - 24th International Conference on Enterprise Information Systems
424

Figure 8: Full Network: Accuracy & Loss.
Figure 9: Dropout Network : Accuracy & Loss.
activation of the dropout.
As a result, we can conclude that the model’s gen-
eralization capability became much better since the
loss on the validation set was only slightly higher
compared to the training loss.
Another example for classification based on of
dataset (Dogs vs. Cats) (M.Sarvazyan, 2022), we will
investigate the performance of Full network on simu-
lated data, and compare it to standard dropout.
Figure 10: Full Network: Accuracy & Loss.
The gap between training accuracy and validation
accuracy is very high showing that the model is over-
fitting (see figure 10). Training accuracy approaches
1 and training loss approaches 0. Thus, the model
perfectly fits the training set, which is a sign of over-
fitting.
Using the dropout technique (figure 11), although
the model is not totally stable, we can see that the the
gap between trainning accuracy and validation con-
verge slowly and the gap between training and valida-
tion loss is smaller. Actually, the difference between
these two curves is small enough to consider that the
model is not overfitting anymore. Training and val-
idation loss confirm that the model doesn’t overfit.
Both loss values are similar.
Also, the model does not predict the training set
perfectly anymore.
This is also a sign that the model is not overfitting and
it generalizes better.
These tables show the variation of the accuracy
[Table 1] and loss [Table 2] of validation dataset with
and without Dropout. We observe a pretty good per-
formance, this further reinforces the motivation about
the potential of Dropout methods for improving the
predictive performance (Belciug, 2020).
Mechanism of Overfitting Avoidance Techniques for Training Deep Neural Networks
425

Figure 11: Full Network: Accuracy & Loss.
Table 1: Accuracy of a validation dataset.
Dataset Normal-Accuracy Accuracy-Dropout
SONAR 99% 95%
Diabetes 75% 81%
MNIST 98% 99%
Dogs/Cats 100% 100%
Table 2: Loss of a validation dataset.
Dataset Normal-Loss Loss-Dropout
Diabetes 0.99% 0.45%
MNIST 5.00% 3.00%
Dogs/Cats 55% 22.80%
7 CONCLUSION
This paper mainly addresses the problem of under-
standing and using Early stopping as well as Dropout
on the entry into the maximum pooling layers of
convolutional neural networks. Early stopping is a
method to stop the training of a neural network when
the validation loss stops improving.
Dropout is a technique for improving neural net-
works by reducing overfitting. It forces a neural net-
work to learn more robust features that are useful
by deactivating certain units (neurons) in a layer
with a certain probability p. We presents precise iter-
ation complexity results for dropout training in two-
layer ReLU networks using the logistic loss.
In the future, we would like to explore applica-
tions of deep network compression (Li et al., 2020)
and investigate the sparsity property of learned reten-
tion rates to encourage a sparse representation of the
data and the neural network structure (Wang et al.,
2019). Another line of research is to dynamically
adjust the architecture of deep neural networks and
therefore reduce the complexity of the model using
dropout rates.
REFERENCES
Arora, R., Bartlett, P., Mianjy, P., and Srebro, N. (2020).
Dropout: Explicit Forms and Capacity Control.
OCLC: 1228394951.
Belciug, S. (2020). Artificial intelligence in cancer: diag-
nostic to tailored treatment. OCLC: 1145585080.
Bengio, Y., Lamblin, P., Popovici, D., and Larochelle,
H. (2007). Greedy Layer-Wise Training of Deep
Networks. Advances in neural information process-
ing systems., (19):153–160. Place: San Mateo,
CA Publisher: Morgan Kaufmann Publishers OCLC:
181070563.
Brownlee, J. (2018). How to Avoid Overfitting in Deep
Learning Neural Networks.
Brownlee, J., Machine Learning, and Mastery (2017). de-
velop deep learning models on Theano and Tensor-
Flow using Keras, volume 1. Machine Learning Mas-
tery, Melbourne, Australia.
Caruana, R., Lawrence, S., Giles, L., and 14th Annual Neu-
ral Information Processing Systems Conference, N. .
(2001). Overfitting in neural nets:. Adv. neural inf.
proces. syst. Advances in Neural Information Process-
ing Systems. OCLC: 5574566588.
Cerisara, C., Caillon, P., and Le Berre, G. (2021). Unsuper-
vised post-tuning of deep neural networks. In IJCNN,
Proceedings of the 2021 International Joint Confer-
ence on Neural Networks (IJCNN), Virtual Event,
United States.
diabetes.csv.en. URL: https://kaggle.com/saurabh00007/di
abetescsv (visited on 12/29/2021)
Etzold, D. (2022). MNIST — Dataset of Handwritten Dig-
its.
Hinton, G. E., Srivastava, N., Krizhevsky, A., Sutskever, I.,
and Salakhutdinov, R. R. (2012). Improving neural
networks by preventing co-adaptation of feature de-
tectors, volume 1.
IBM
Cloud Education (2021). What is Overfitting?
ICEIS 2022 - 24th International Conference on Enterprise Information Systems
426

Iraji, M. S., Feizi-Derakhshi, M.-R., and Tanha, J. (2021).
COVID-19 Detection Using Deep Convolutional Neu-
ral Networks. Complexity, 2021:1–10.
Krizhevsky, A., Hinton, G. E., and Sutskever, I. (2017).
ImageNet classification with deep convolutional neu-
ral networks. Commun ACM Communications of the
ACM, 60(6):84–90.
Larxel (2021). Early Diabetes Classification.
LeCun, Y., Hinton, G., and Bengio, Y. (2015). Deep learn-
ing. Nature, 521(7553):436–44. OCLC: 5831400088.
Li, C., Mao, Y., Zhang, R., Huai, J., and SpringerLink
(Online service) (2020). A revisit to MacKay algo-
rithm and its application to deep network compres-
sion. OCLC: 1196515065.
Liang, X., Wu, L., Li, J., Wang, Y., and Meng, Q. (2021).
R-Drop: Regularized Dropout for Neural Networks.
OCLC: 1269560920.
Maren, M., Lukas, B., Christoph, L., and Philipp, H. (2017).
Early Stopping without a Validation Set. OCLC:
1106261430.
Moolayil, J. (2019). Learn Keras for deep neural networks:
a fast-track approach to modern deep learning with
Python. OCLC: 1079007529.
M.Sarvazyan, A. (2022). Kaggle: Your Home for Data Sci-
ence.
Ng, A. Y. (2004). Feature selection, L1 vs. L2 regulariza-
tion, and rotational invariance. OCLC: 8876667046.
Senen-Cerda, A. and Sanders, J. (2020). Almost sure con-
vergence of dropout algorithms for neural networks.
OCLC: 1144830913.
Shaeke, S. and Xiuwen, L. (2019). Overfitting Mechanism
and Avoidance in Deep Neural Networks. OCLC:
1106327112.
Srivastava N, Hinton G, Krizhevsky A, Sutskever I, and
Salakhutdinov R (2014). Dropout: A simple way to
prevent neural networks from overfitting. J. Mach.
Learn. Res. Journal of Machine Learning Research,
15:1929–1958. OCLC: 5606582392.
Wang, Z., Fu, Y., and Huang, T. S. (2019). Deep learn-
ing through sparse and low-rank modeling. OCLC:
1097183504.
Wei, C., Kakade, S., and Ma, T. (2020). The Implicit and
Explicit Regularization Effects of Dropout. OCLC:
1228392785.
Wu, J.-W., Chang, K.-Y., and Fu, L.-C. (2022). Adap-
tive Under-Sampling Deep Neural Network for Rapid
and Reliable Image Recovery in Confocal Laser Scan-
ning Microscope Measurements. IEEE Trans. In-
strum. Meas. IEEE Transactions on Instrumentation
and Measurement, 71:1–9. OCLC: 9359636331.
Xiaobo, L., Lijun, W., and Juntao, L. (2021). R-Drop:
Regularized Dropout for Neural Networks. OCLC:
1269560920.
Yingbin, B., Erkun, Y., and Bo, H. (2021). Understand-
ing and Improving Early Stopping for Learning with
Noisy Labels. OCLC: 1269561528.
Mechanism of Overfitting Avoidance Techniques for Training Deep Neural Networks
427
