Estimation of Looming from LiDAR
Juan D. Yepes and Daniel Raviv
Florida Atlantic University, Electrical Engineering and Computer Science Department,
Keywords:
Looming, Obstacle Avoidance, Collision Free Navigation, LiDAR, Threat Zones, Autonomous Vehicles.
Abstract:
Looming, traditionally defined as the relative expansion of objects in the observer’s retina, is a fundamental
visual cue for perception of threat and can be used to accomplish collision free navigation. The measurement
of the looming cue is not only limited to vision and can also be obtained from range sensors like LiDAR
(Light Detection and Ranging). In this article we present two methods that process raw LiDAR data to es-
timate the looming cue. Using looming values, we show how to obtain threat zones for collision avoidance
tasks. The methods are general enough to be suitable for any six-degree-of-freedom motion and can be imple-
mented in real-time without the need for fine matching, point-cloud registration, object classification or object
segmentation. Quantitative results using the KITTI dataset shows advantages and limitations of the methods.
1 INTRODUCTION
Collision avoidance continues to be one of the great-
est challenges in unmanned vehicles (Yasin et al.,
2020) and autonomous driving (Roriz et al., 2021),
where the demand for increasingly robust, fast and
safe systems is crucial for the development of these
industries. It is closely tied with the perception of
threat. For creatures in nature, this task seems to
be more fundamental than the recognition of shapes
(Albus and Hong, 1990). Studies in biology have
shown strong evidence of neural circuits in the brains
of creatures related to the identification of looming
(Ache et al., 2019). Basically, creatures have evolved
instinctive escaping behaviors that tie perception di-
rectly to action (Evans et al., 2018).
The visual looming cue, defined quantitatively by
(Raviv, 1992) as the instantaneous change of range
over the range, is related to the increase in size of an
object projected on the observer’s retina. It is an indi-
cation of threat that can be used to accomplish colli-
sion avoidance tasks. The looming cue is not limited
exclusively to vision and can be computed from active
sensors like LiDAR (Light Detection and Ranging).
In general, architectures for autonomous vehi-
cles consist of three sub-systems: Perception, Plan-
ning and Control (Sharma et al., 2021). The Per-
ception sub-system can be divided subsequently into
three categories: camera-based, LiDAR-based and
sensor fusion-based approaches (Wang et al., 2018).
Traditionally the task of obstacle avoidance is ex-
F
V
z
x
y
F
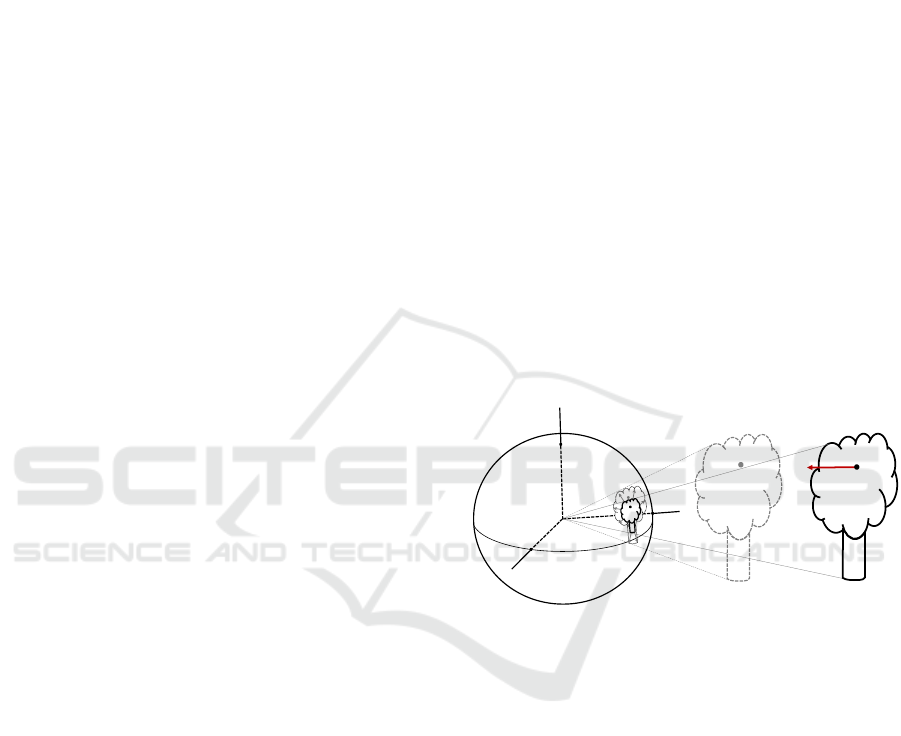
Figure 1: Visualizing looming cue: relative expansion of
3D object on 2D image sensor.
clusively related to the Planning and Control sub-
systems (Yasin et al., 2020) where classification of
objects is a prerequisite prior to any global or local
path planning action (Mujumdar and Padhi, 2011).
In contrast, it has been shown that obstacle avoid-
ance tasks can be accomplished without 3D recon-
struction (structure from motion), using the Active
Perception paradigm (Aloimonos, 1992).
In this paper we follow an approach similar to (Ra-
viv and Joarder, 2000). It uses 2D raw data to directly
get quantitative indication of visual threat. We present
methods for obtaining looming values using raw Li-
DAR data and threat zones. This allows for real-time
collision avoidance tasks without 3D reconstruction
or scene understanding. In the proposed approach
further processing of the LiDAR point cloud is not
required for obtaining threat zones.
Yepes, J. and Raviv, D.
Estimation of Looming from LiDAR.
DOI: 10.5220/0011115300003191
In Proceedings of the 8th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2022), pages 455-462
ISBN: 978-989-758-573-9; ISSN: 2184-495X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
455

> >
Figure 2: Equal looming spheres as shown in red for (L > 0)
and blue for (L < 0).
2 RELATED WORK
2.1 Visual Looming
The visual looming cue is related to the relative
change in size of an object projected on the observer’s
retina as the range to the object varies (Figure 1). It
is quantitatively defined as the negative value of the
time derivative of the range between the observer and
a point in 3D divided by the range (Raviv, 1992):
L = − lim
∆t→0
r
2
−r
1
∆t
r
1
= −
˙r
r
(1)
where L denotes looming, dot denotes derivative
with respect to time.
2.1.1 Looming Properties
Note that the result for L in equation (1) is a scalar
value which is dependent on the vehicle translation
component but independent of the vehicle rotation.
It was shown that points in space around the vehi-
cle that share the same looming values form equal
looming spheres with centers that lie on the instan-
taneous translation vector t and intersect with the ve-
hicle origin. These looming spheres expand and con-
tract depending on the magnitude of the translation
vector (Raviv, 1992). Regions for obstacle avoidance
and other behavior related tasks can be defined using
equal looming surfaces. For example, a high danger
zone for L > L
3
, medium threat for L
3
> L > L
2
and
low threat for L
2
> L > L
1
(Figure 2).
2.1.2 Advantages of Looming
Using the same LiDAR point cloud, it is possible to
get looming directly without 3D reconstruction and
without knowing the ego-motion of the LiDAR sen-
sor. Looming is measured in time
−1
units and pro-
vide information about imminent threat to the ob-
server. There is no need for scene understanding such
as identifying cars, bikes, or pedestrians. In addition,
looming provides threats for moving objects as well.
Extracting looming for obstacle avoidance using point
cloud raw data from LiDAR is the main contribution
of this paper.
2.1.3 Measuring Visual Looming
Several methods were shown to quantitatively extract
the visual looming cue on a 2D image sequence by
measuring attributes like area, brightness, texture den-
sity and image blur (Raviv and Joarder, 2000).
The Visual Threat Cue (VTC), just like the visual
looming, is a measurable time-based scalar value that
provides some measure for a relative change in range
between a 3D surface and a moving observer (Kundur
and Raviv, 1999).
Event-based cameras were shown to detect loom-
ing objects in real-time from optical flow using clus-
tering of pixels (Ridwan, 2018).
2.2 LiDAR for Obstacle Avoidance
In general, collision avoidance approaches require
3D reconstruction of the environment where colli-
sion free paths can be computed an executed. Sev-
eral deep learning and path planning techniques for
autonomous driving were mentioned in (Grigorescu
et al., 2020). Point clouds, provided by LiDAR
sensors, are the preferred representation for many
scene understanding related applications. These point
clouds are processed to build real-time 3D local-
ization maps, using SLAM (Simultaneous Localiza-
tion and Mapping) and related techniques (Zhang and
Singh, 2014). In general, most methods use 3D object
detection, segmentation and scene understanding. In
addition, ego-motion is required for obstacle avoid-
ance and autonomous navigation.
In contrast, our approach provides relevant infor-
mation for the task of collision avoidance in the form
of a real-time looming threat map. This allows the di-
rect transition from perception to action without the
need of object identification, finding ego-motion or
3D reconstruction.
VEHITS 2022 - 8th International Conference on Vehicle Technology and Intelligent Transport Systems
456

z
x
y
t
Ω
t
Ω
Figure 3: Vehicle undergoing a generalized six-degree-of-
freedom motion relative to the world frame. t is the transla-
tion velocity vector, and Ω is the rotation vector.
z
x
y
r
t
F
V
ϕ
Figure 4: LiDAR coordinate system.
3 METHOD
3.1 Derivation of Looming from the
Relative Velocity Field
We will derive a general expression for Looming (L)
for any six-degree-of-freedom motion that involves
velocity and range using spherical coordinates. Then
we can apply this expression with LiDAR data.
Vehicle Motion. Consider a vehicle undergoing a
general six-degree-of-freedom motion in a 3-D space
relative to an arbitrary stationary reference point.
At any given time, the vehicle will have an associ-
ated translation velocity vector t and a rotation vector
Ω relative to the world frame as shown on Figure 3.
LiDAR Coordinate System. Consider a local coor-
dinate system centered at the LiDAR sensor, fixed to
the moving vehicle. We chose the x-axis to be aligned
with the forward direction of the vehicle and the z-
axis to be aligned with the vertical orientation. Refer
to Figure 4: In this frame any stationary feature on the
3-D scene can be represented by spherical coordinates
(r, θ,φ) where r is the radial range to the feature point
F, θ is the azimuth angle measured from the x-axis
and φ is the elevation angle from the XY-plane.
Relative Velocity Field. In our analysis the vehicle
is undergoing a generalized six-degree-of-freedom
motion in the world frame. This is equivalent to in-
terpreting the motion as the vehicle being stationary
and the feature point F moving on the LiDAR frame
with opposite velocity vector −t and rotation −Ω.
In this LiDAR frame the feature F has relative ve-
locity vector:
V = (−t) + (−Ω × r) (2)
We can also conveniently express V using spherical
unit vector components e
r
, e
θ
, e
φ
:
V = ˙re
r
+ r
˙
θcos(φ)e
θ
+ r
˙
φe
φ
(3)
Note that equations (2) and (3) refer to the same rela-
tive velocity field V.(r in bold refers to the range vec-
tor and the scalar r to its magnitude, i.e r = |r|).
Looming from Normalized Velocity Field. We
can get another expression for looming (L) by divid-
ing equations (2) and (3) by r, expanding t and Ω, and
grouping components by e
r
:
L =
t · e
r
r
(4)
Notice that by knowing the instantaneous translation
vector of the vehicle t and range r, we can compute
the looming value (L) for any point along the direc-
tional unit vector e
r
.
3.2 Looming from LiDAR
We propose two ways to extract looming from LiDAR
data.
3.2.1 Using LiDAR Data Only
Looming can be estimated using LiDAR point clouds.
Each full scan of the LiDAR results in a range image
grid. Using two consecutive scans we get two range
image grids as obtained from the same 3D environ-
ment. Theoretically, if the range value of each LiDAR
pixel in each grid corresponds to the same 3D point
in space, we obtain two range values from which the
looming can be estimated, where the only error is due
to the range values as obtained from the LiDAR mea-
surements.
However, this is practically not the case: the prob-
lem with this approach is that due to the vehicle mo-
tion the assumption may hold only when the changes
Estimation of Looming from LiDAR
457
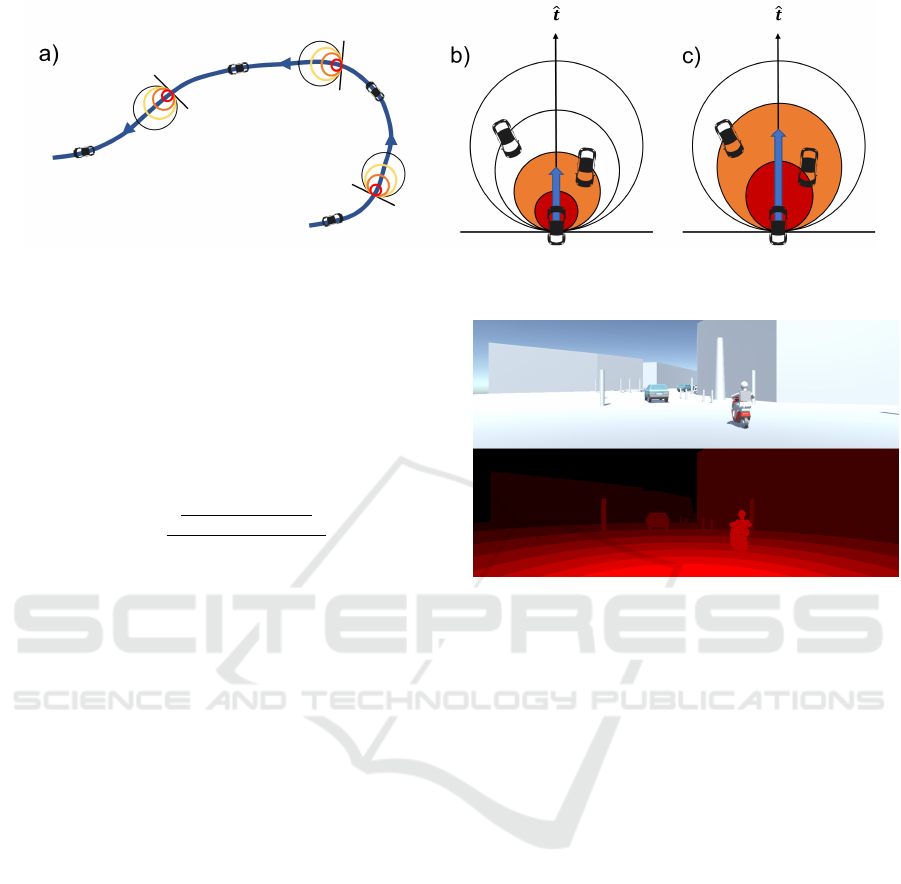
Figure 5: Equal looming circles. a) Vehicle trajectory, b) High and medium threat zones, c) Vehicle motion: higher speeds
results in an expansion of the threat region.
from one image to another are infinitesimally small.
To minimize the effect of incorrect looming calcu-
lations and improve the robustness of the approach,
we use interpolation/decimation and discretization of
the data in the grid allowing for range values that are
closer to the real ones.
Equation (5) shows the specific calculations.
L
i j
= −
r(θ
i
,φ
i
)
j+1
−r(θ
i
,φ
i
)
j
∆t
r(θ
i
, φ
i
)
j+1
(5)
where i = [1, 2, .., n], n is the number of points on
the grid, j + 1, j correspond to the current and pre-
vious point cloud sample sets. The resulting L
i j
can
be interpreted as a LiDAR-based looming image from
where threat zones can be obtained for the purpose of
collision avoidance actions.
3.2.2 Using LiDAR + IMU
Another method for obtaining looming is using Li-
DAR and IMU (Inertial Measurement Unit). Even
though this is not the primary focus of this paper, its
purpose is to demonstrate that LiDAR combined with
IMU increase the robustness of computation of loom-
ing. However, this approach has its drawback because
it gives incorrect values of looming for moving ob-
jects. Note that it requires only the translation vector
and not the rotation component of the LiDAR sensor.
It uses ego-motion only partially, and there is no need
for 3D reconstruction and image understanding.
We can compute looming (L) for every measured
stationary point by using equation (4). The range r is
provided by the LiDAR sensor for every point on the
point cloud. The instantaneous translation vector t of
the vehicle can be obtained from the IMU or by other
odometry methods.
For special cases where vehicles have little side
motion, like most automotive applications, the trans-
lation vector can be assumed to be equal to the ve-
hicle forward motion component, and the magnitude
Figure 6: Looming from synthetic data: top image is the
scene; bottom image is the looming map (Brighter red rep-
resents higher value of looming).
(speed) can be obtained from the vehicle odometer or
from the speed encoder of the wheel.
3.2.3 Threat Maps
From either method, threat regions can be obtained
from looming values by assigning specific thresholds.
For example, High, Medium, or Low threat zones.
(Figure 5).
4 RESULTS
We present results of the methods for obtaining loom-
ing and threat zones using synthetic and real data.
4.1 Ground Truth Looming with
Synthetic Data
A simulation of a moving vehicle in a stationary en-
vironment was performed using the Unity3D game
engine. In this simulation the vehicle is translating
forward at a constant speed between some stationary
objects. The top part of Figure 6 shows an actual im-
age of the scene. The bottom part of Figure 6 shows
VEHITS 2022 - 8th International Conference on Vehicle Technology and Intelligent Transport Systems
458
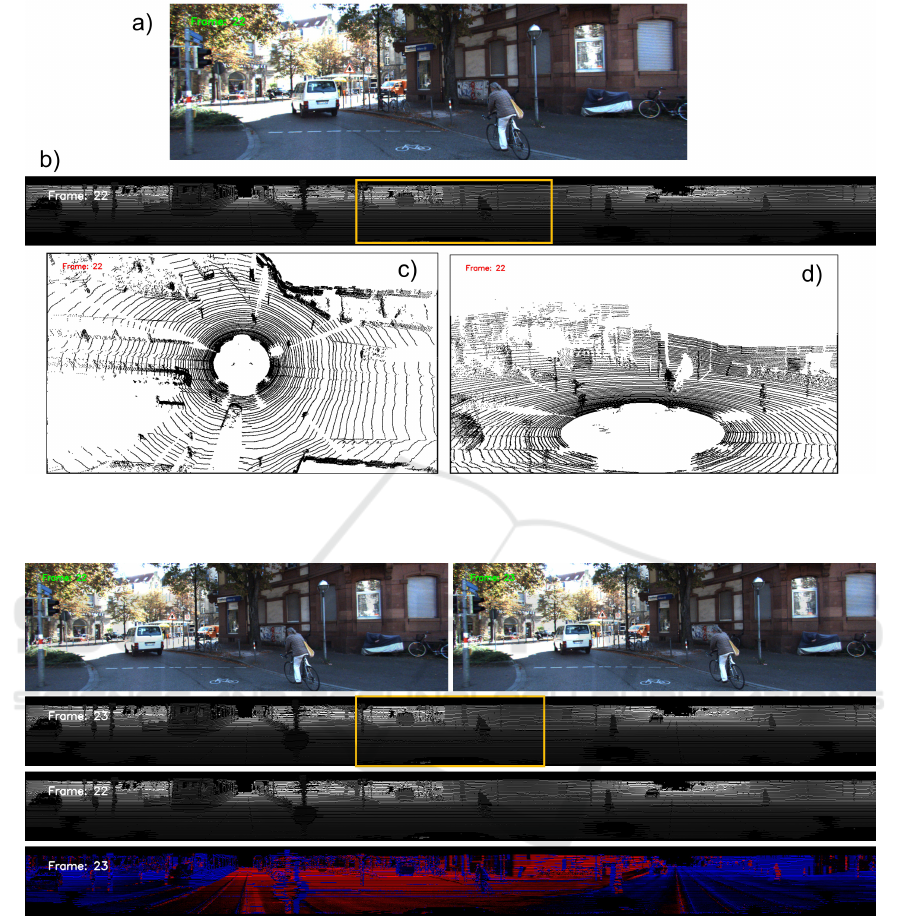
Figure 7: LiDAR data from the KITTI dataset: a) Original image from a color camera mounted on the vehicle, b) 360 degrees
LiDAR data, the yellow rectangle corresponds to the color camera field of view, c) Top view of point cloud in 3D, d) Bird’s
eye 3D view of point cloud.
Figure 8: Estimated looming from LiDAR only. (Refer to text for details).
ground truth looming computed using equation (1)
and shown from the observer point of view. A pixel
shader filter was implemented to visualize the loom-
ing value as levels of red color. Brighter red color
corresponds to higher value of looming.
4.2 LiDAR Data from KITTI Dataset
We processed real data using a particular city drive
from the well-known KITTI dataset (Geiger et al.,
2013). The KITTI dataset includes raw data provided
by a Velodyne 3D laser scanner (LiDAR) along with
velocity vector from a GPS/IMU inertial navigation
system. Color camera images were only used as ref-
erence as shown in Figure 7.a. The LiDAR sensor
specifications are: Velodyne HDL-64E rotating 3D
laser scanner, 10 Hz, 64 beams, 0.09-degree angular
resolution, 2 cm distance, accuracy, provides around
1.3 million points/second, field of view: 360 degrees
horizontal, 26.8 degrees vertical, range:120 m.
Shown in Figure 7 are the original images from
one of the vehicle color cameras and gray-scale rep-
resentations of the raw LiDAR data. A yellow rectan-
gle indicates where the LiDAR data matches the field
Estimation of Looming from LiDAR
459

Figure 9: Looming from LiDAR (red is potential threat): a) Top view, b) Bird’s eye view.
Figure 10: Looming from Lidar: a) Original image, b) Depth from LiDAR, c) Looming from LiDAR + IMU, d) Estimated
looming from LiDAR only.
of view of the color camera. Also shown are top and
bird’s eye views of the data for a specific time instant
of the video.
4.3 Estimation of Looming using
LiDAR
In Figure 8, original images from two consecutive
frames (frames 22 and 23) are shown along LiDAR
VEHITS 2022 - 8th International Conference on Vehicle Technology and Intelligent Transport Systems
460
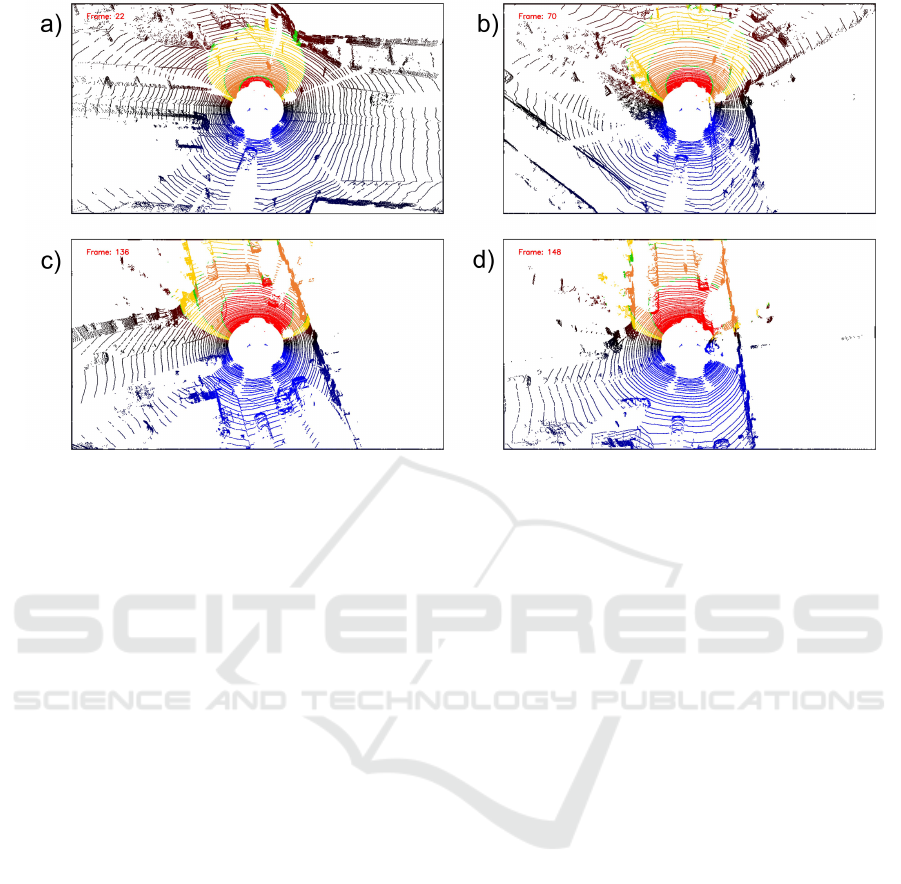
Figure 11: Threat zones expanding and contracting according to looming (refer to text for details).
views (360 degrees) for two time instants. The re-
sultant looming estimation using equation (5) is also
shown at the bottom of Figure 8. Notice positive
values of looming are shown in red and corresponds
mainly to points along the forward direction of mo-
tion (around the center of the image).
Due to the effect of occlusions of points, there are
sudden changes in range between frames, causing an
”edge-effect” around objects with incorrect looming
values, shown in intense red or blue colors. However
an important advantage is that the method incorpo-
rates values of looming as obtained from moving ob-
jects. For example, the bicycle in the middle of the
image is correctly portrayed with dark colors, mean-
ing low values of looming as expected for this kind of
motion since the bicycle velocity almost matches the
velocity of the vehicle, and the rate of change in range
is close to zero.
4.4 Looming from LiDAR and IMU
We use equation (4) to compute looming for each
point. From the IMU sensor we obtained the trans-
lation velocity vector t and from the LiDAR sensor
we obtained the range r. Figure 9 shows top and
bird’s eye views for two time instants. Color intensity
was assigned to each point representing the obtained
looming value: red for positive values, and blue for
negative values.
We can see that the looming is very similar to
the expected shown in simulation. This method ade-
quately registers looming for stationary objects; how-
ever, it is imprecise for moving objects since the rela-
tive speed is not considered.
In Figure 10 a comparison between both methods
is shown.
4.5 Threat Zones for Collision Free
Navigation
In Figure 11 several threat zones are computed us-
ing looming from section 4.4: red zone - high threat,
orange zone - medium threat and yellow zone - low
threat. Notice how the threat zones change sizes be-
tween frames, this is due to the change in speed of the
vehicle.
5 CONCLUSIONS
In this paper we demonstrate how to compute loom-
ing directly from raw LiDAR data without 3D recon-
struction. There is no need for scene understanding
such as identifying cars, bikes, or pedestrians. Two
approaches are shown, one uses LiDAR data only, and
the other uses LiDAR data combined with IMU.
The approach shows that looming provides infor-
mation about imminent threat that can potentially be
used for navigation tasks such as obstacle avoidance.
The paper shares highly encouraging initial results
and should be considered as “work in progress” as
more looming from LiDAR-related methods are be-
ing explored.
Estimation of Looming from LiDAR
461

ACKNOWLEDGEMENTS
The authors thank Dr. Sridhar Kundur for many fruit-
ful discussion and suggestions that led to meaningful
improvements of this manuscript.
REFERENCES
Ache, J. M., Polsky, J., Alghailani, S., Parekh, R., Breads,
P., Peek, M. Y., Bock, D. D., von Reyn, C. R., and
Card, G. M. (2019). Neural basis for looming size and
velocity encoding in the drosophila giant fiber escape
pathway. Current Biology, 29(6):1073–1081.
Albus, J. S. and Hong, T. H. (1990). Motion, depth, and im-
age flow. In Proceedings., IEEE International Confer-
ence on Robotics and Automation, pages 1161–1170.
IEEE.
Aloimonos, Y. (1992). Is visual reconstruction necessary?
obstacle avoidance without passive ranging. Journal
of Robotic Systems, 9(6):843–858.
Evans, D. A., Stempel, A. V., Vale, R., Ruehle, S., Lefler,
Y., and Branco, T. (2018). A synaptic threshold
mechanism for computing escape decisions. Nature,
558(7711):590–594.
Geiger, A., Lenz, P., Stiller, C., and Urtasun, R. (2013).
Vision meets robotics: The kitti dataset. The Inter-
national Journal of Robotics Research, 32(11):1231–
1237.
Grigorescu, S., Trasnea, B., Cocias, T., and Macesanu,
G. (2020). A survey of deep learning techniques
for autonomous driving. Journal of Field Robotics,
37(3):362–386.
Kundur, S. R. and Raviv, D. (1999). Novel active vision-
based visual threat cue for autonomous navigation
tasks. Computer Vision and Image Understanding,
73(2):169–182.
Mujumdar, A. and Padhi, R. (2011). Evolving philoso-
phies on autonomous obstacle/collision avoidance of
unmanned aerial vehicles. Journal of Aerospace Com-
puting, Information, and Communication, 8(2):17–41.
Raviv, D. (1992). A quantitative approach to looming. US
Department of Commerce, National Institute of Stan-
dards and Technology.
Raviv, D. and Joarder, K. (2000). The visual looming nav-
igation cue: A unified approach. Comput. Vis. Image
Underst., 79:331–363.
Ridwan, I. (2018). Looming object detection with event-
based cameras. University of Lethbridge (Canada).
Roriz, R., Cabral, J., and Gomes, T. (2021). Automotive
lidar technology: A survey. IEEE Transactions on In-
telligent Transportation Systems.
Sharma, O., Sahoo, N. C., and Puhan, N. (2021). Recent
advances in motion and behavior planning techniques
for software architecture of autonomous vehicles: A
state-of-the-art survey. Engineering applications of
artificial intelligence, 101:104211.
Wang, M., Voos, H., and Su, D. (2018). Robust online ob-
stacle detection and tracking for collision-free navi-
gation of multirotor uavs in complex environments.
In 2018 15th International Conference on Control,
Automation, Robotics and Vision (ICARCV), pages
1228–1234. IEEE.
Yasin, J. N., Mohamed, S. A., Haghbayan, M.-H., Heikko-
nen, J., Tenhunen, H., and Plosila, J. (2020). Un-
manned aerial vehicles (uavs): Collision avoidance
systems and approaches. IEEE access, 8:105139–
105155.
Zhang, J. and Singh, S. (2014). Loam: Lidar odometry
and mapping in real-time. In Robotics: Science and
Systems, volume 2, pages 1–9. Berkeley, CA.
VEHITS 2022 - 8th International Conference on Vehicle Technology and Intelligent Transport Systems
462
