
Human Action Recognition using Convolutional Neural Network:
Case of Service Robot Interaction
Souhila Kahlouche
1a
and Mahmoud Belhocine
2b
1
Ecole Nationale Supérieure d’Informatique (ESI), Oued Smar, Algiers, Algeria
2
Centre de Développement des Technologies Avancées (CDTA), Baba Hassen, Algiers, Algeria
Keywords: Human Robot Interaction (HRI), Human Activities Recognition (HAR), Deep Learning, Robot Operating
System (Ros).
Abstract: This paper proposes a Human Robot Interaction (HRI) framework for a service robot capable of understanding
common interactive human activities. The human activity recognition (HAR) algorithm is based on end to
end deep Convolutional Neutral Network architecture. It uses as an input a view invariant 3D data of the
skeleton joints, which is recorded from a single Microsoft Kinect camera to create a specific dataset of six
interactive activities. In addition, an analysis of the most informative joint is made in order to optimize the
recognition process. The system framework is built on Robot Operating System (ROS), and the real-life
activity interaction between our service robot and the user is conducted for demonstrating the effectiveness
of the developed HRI system. The trained model is evaluated on an experimental dataset created for this work
and also the publicly available datasets Cornell Activity Dataset (CAD-60), and KARD HAR datasets. The
performance of the proposed algorithm is proved when compared to other approaches and the results confirm
its efficiency.
1 INTRODUCTION
Social robots must be able to interact efficiently with
humans, to understand their needs, to interpret their
orders and to predict their intentions. This can be
achieved by translating the sensed human
behavioural signals and context descriptors into an
encoded behaviour. However, it stills a challenge
because of the complex nature of the human actions.
Even if many researches related to human-robot
interaction (HRI) were announced, there were not so
many reports of its successful application to robotic
service task.
Limin in (Limin, M., & Peiyi, Z., 2017) used a
Kinect camera to capture human actions in real time.
They used this information to send commands to the
robot through the Bluetooth communication and
make some movements as turning and forward. Borja
in (Borja et al., 2017) presented an algorithm, which
used depth images from Kinect to control the speed
and angular position of a mobile robot. The algorithm
a
https://orcid.org/0000-0001-8353-4566
b
https://orcid.org/0000-0003-3495-7444
used the previous frame for the segmentation of the
current one, thus, a user should extend the hand in
front of the camera and leaves it for a while until the
program recognizes the hand. They also designed a
PID to control the wheel speed of the robot.
In the context of robot assisted living, Zhao in
(Zhao et al., 2014) proposed a gesture recognition
algorithm for taking order service of an elderly care
robot. It was designed mainly for helping non-expert
users like elderly to call a service robot. Faria in
(Faria et al., 2015), designed a skeleton-based
features model, and used it on mobile robot in a home
environment, to recognize daily and risky activities in
real-time and to react for assisting the person.
For Human Action Recognition task, the early
well-known approaches are hand-crafted based
features. In these approaches researchers extract
features such as global or local image features like
texture, edge or other attributes from the frames and
use them within different machine learning
algorithms (Yang, X., & Tian, Y., 2014), (Suriani
2018) and (Kahlouche, S., & Belhocine, 2019).
Kahlouche, S. and Belhocine, M.
Human Action Recognition using Convolutional Neural Network: Case of Service Robot Interaction.
DOI: 10.5220/0011122300003271
In Proceedings of the 19th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2022), pages 105-112
ISBN: 978-989-758-585-2; ISSN: 2184-2809
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
105
However, hand-crafting features require significant
domain knowledge and careful parameter tuning,
which makes it not robust to various situations.
Recently, with the emergence and successful
deployment of deep learning techniques for image
classification, researchers have migrated from
traditional handcrafting to deep learning techniques
for HAR. Several works employed Convolutional
Neural network CNN, due to its spectacular progress
in extracting spatial correlation characteristics in
image classification tasks (Simonyan, K., &
Zisserman, 2014) and (Hascoet, 2019).
We presented in previous works (Bellarbi, A et
al., 2016), and (Kahlouche, S et al. 2016), ROS based
framework for B21r service robot, including a social
navigation approach where the robot was able to
navigate in indoor environment while detecting and
avoiding humans using several social rules, which are
computed according to its skeleton pose orientations.
Additionally, a Guide User Interface (GUI) has been
designed to control the robot through its screen touch
which displays some functionality such as Call the
Robot, Follow Me and Guide Me.
In this works, we aim to make the Human-Robot
interaction more natural and more intuitive, by
integrating HAR module to our framework. This is an
alternative solution to the GUI use. We proposed a
deep learning architecture for activity recognition to
help the robot to recognize which service is requested
by the user, and react consequently.
For this purpose, we investigate the usefulness of
using only 3D skeleton coordinates of human body in
end-to-end deep CNN to learn the spatial correlation
characteristics of human activities. Hence, the mains
considered contributions are:
- Data transformations in the pre-processing
step applied on the 3D skeleton data, in order
to reduce observation variations caused by
viewpoint changes.
- An analysis of the Most Informative Joints has
been done to evaluate the informativeness of
each joint in the dataset, which leads to feature
dimensionality reduction when training the
CNN on relevant data.
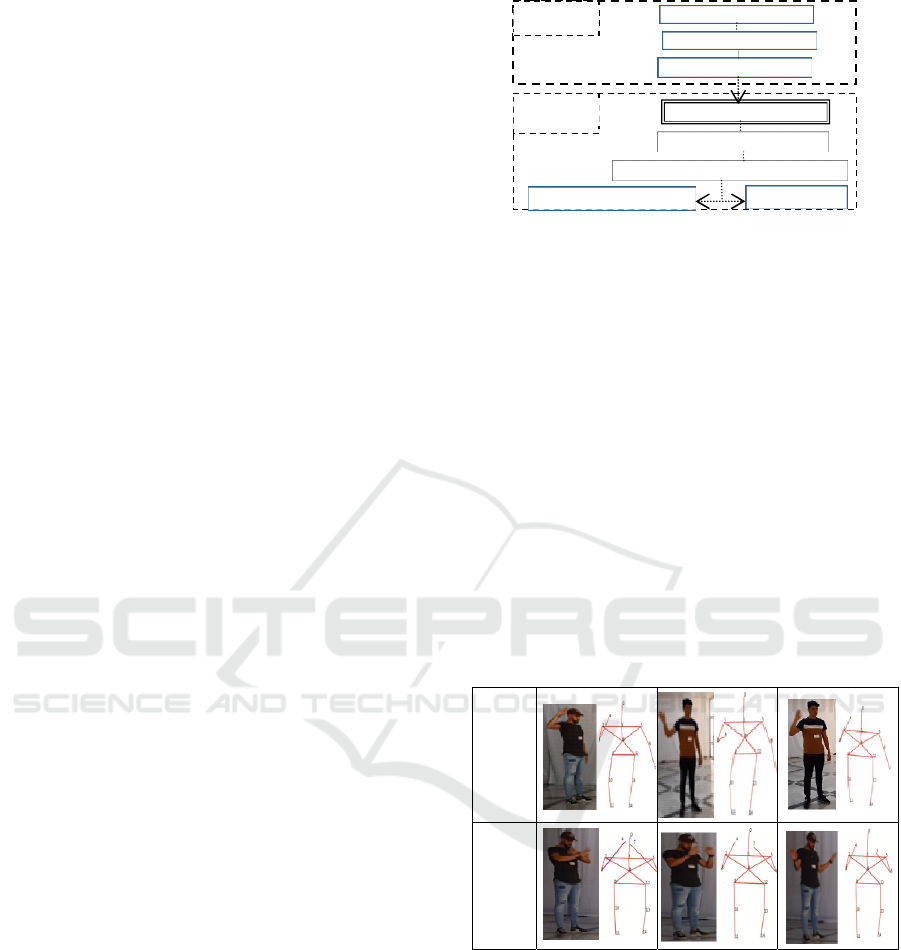
2 HRI SYSTEM OVERVIEW
Figure 1 shows our proposed architecture block
diagram, it uses mainly offline and online process.
Figure 1: The framework of a human-robot interaction.
2.1 Dataset Creation
Our dataset has been created using OpenNI tracker
framework, which allows the skeleton tracking at30
fps, providing 3D Euclidean coordinates and three
Euler angles of rotation in the 3D space for each joint
with respect to the sensor. The dataset contains six
interactive activities performed by four different
individuals. Among the activities, four are static,
where the user does not move from the camera view
field (Hello, Stop, Call, Pointing), and two dynamic
activities where the user can leave the camera view
field (Going, Coming). A seventh class named "No
Activity" has been added, it is realized with
sequences where the user is immobile or when he
does not express any interaction gestures.
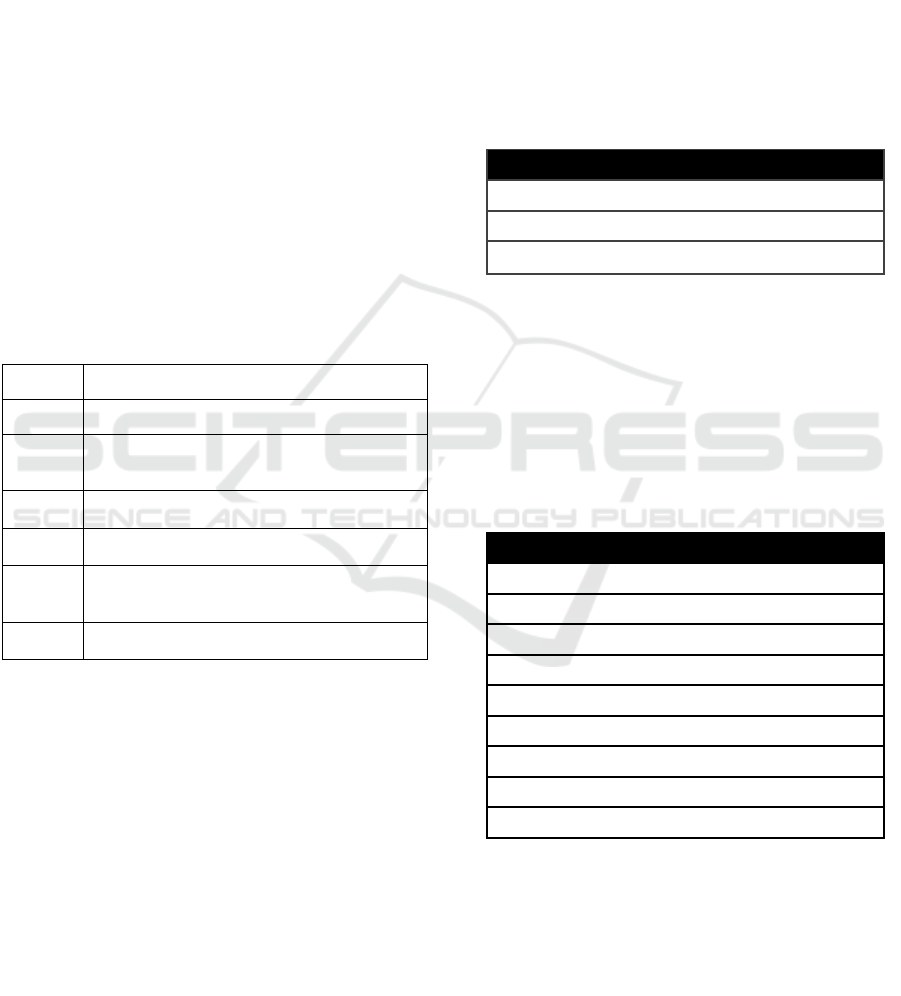
Figure 2 shows some examples of our dataset:
Hello
Stop
Figure 2: Examples of our dataset.
2.2 Features Extraction
In most activities, many joints contribute very little
changes and are not significant for action recognition.
Hence, an analysis is performed to concentrate only
on significant joints which highly contribute to
human activity. According to (Ofli et al., 2014) works
called Sequence of Most Informative Joints (SMIJ)
reported that Shannon entropy represents the higher
entropy related to a maximum contribution of relative
Activit
y
p
rediction
SLAM
Social Navigation
Robot Reaction
Motion/Voice interaction
Model Trainin
g
Dataset creation
Features Extraction
Offline
Online
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
106

joints. Additionally, for Gaussian distribution with
variance
2
σ
the entropy can be calculated by the
formula of Equation (1).
)12(log
2
1
)(
2
+=
πσ
IH
(1)
With:
N
II
2
)( −
=
σ
(2)
I : joint position,
I
: the average joint position
N: the number of significant implications of joint I
in a given temporal sequence.
Figure 3 represents the histogram of the most
informative joints for six (6) types of activities in our
dataset. Therefore, we have selected five significant
joints in the human skeleton and applied suitable
weight on them. On the other hand, we have ignored
the remainder by setting the joints to zero, since they
introduce more noise than useful information to
distinguish activities.
Figure 3: Most Informative Joints of our dataset.
2.2.1 Construction of Feature Vectors
Using the above information, we can compute a set of
features as follows:
- 3D coordinates of the 5 selected joints: (x,y,z)
which are all relative to the torso;
- 3D rotation angles in the space: Ψ ,Ɵ and Φ a
sequence of three rotations according to the three
axes X, Y and Z respectively.
Therefore, the feature vector has the following form:
2.2.2 Feature Pre-Processing
A pre-processing step is applied on the 3D skeleton
data in order, not only to attenuate noise introduced
by the sensor, but also to normalize the data to
accommodate for different users’ heights, limb
lengths, orientations and positions. It consists of the
following steps:
- Translation: to guarantee the same origin of the
coordinates system for all acquired frames, the
reference is set to the torso of the human skeleton;
- Normalization: to reduce the influence of
different users’ heights and limb lengths, first, the
height of the subject is determined; then all
skeleton 3D coordinates are normalized according
to the value of eq.3;
)min()max(
)min(
i
D
i
D
i
D
i
D
normali
D
−
−
=
−
(3)
- Symmetrization: To disambiguate between
mirrored versions of the same activity (e.g.
gestures performed by right and left-handed
people), it is required for activities such as Hello,
Call and pointing. It is just necessary to consider
a new sample based on a mirrored version of the
original 3D skeleton data.
2.3 Model Training
We have used CNN algorithm Network for training
with17 layers. Figure 4 presents the overall structure
of this pipeline.
Input Layer: It is a vector representing sub video
sequences of the 3D skeleton data:
N
attributes
× N
joint
× N
frames
.Where N
attributes
is a vector
composed of x×y×z×Ɵ×
Φ
×
Ψ
. While N
joint
is the
number of joints associated with each configuration
in the video sequence of the dataset and it is equal to
5. N
frames
which is the total number of frames in batch
sequences and it is equal to 30; Zero padding is added
to this layer.
Convolutional Layer1: The input layer is scanned
using 32filters of size 3x3. Batch normalization is
used to accelerate the training of the networks; it
consists of performing the normalization for each
training mini-batch. The used activation is Rectified
Linear Unit (ReLU).
Max Pooling1: It is useful to capture the most
important features and reduce the computation in
advanced layer, we have used (2,1) pooling and zero
padding.
Convolutional Layer2: 64 filters of size 5x5, ReLU
function and batch normalisation are used;
Coming
Going
Pointing
Hello
Call
Stop
Time
X Y Z Ɵ
Human Action Recognition using Convolutional Neural Network: Case of Service Robot Interaction
107

Convolutional Layer3: 128 filters of size (3,3), with
batch normalization and ReLU;
Convolutional Layer4: 256 filters of size (3,3), with
batch normalization and ReLU;
Max Pooling Layer2: We have used 2x2 kernels and
0 padding;
Convolutional Layer5: 256 filters of size (3, 3), batch
normalization, and Elastic-Net (1e-4) regularization
which help for lessening over fitting.
Max Pooling3: Kernel size (2,2), and stride of (2,2),
0 padding;
Convolutional Layer6: 256 filters of size (3,3), 10%
Dropout, and ReLU is applied as activation function;
Max Pooling4: Kernel size (2, 2) and 10% Dropout
are applied;
Convolutional Layer7: 256 filters of size (3,3), zero
padding, 10% Dropout, Elastic-Net (1e-4)
regularization and ReLU is applied as activation
function;
Flattened Layer: Concatenation of 256 feature vectors
into vector of one dimension containing 1024
features.
Fully Connected Layer1: it produces 256 neurons
from the last layer, batch normalization, 30%
Dropout, Regularization Elastic-Net (1e-4) and ReLU
are used;
Fully Connected Layer2: 128 neurons with batch
normalization, ReLU and 30% Dropout are used;
Fully Connected Layer3: 64 neurons, with batch
normalization, ReLU, 30% Dropoutand Elastic-Net
(1e-3) regularization are used;
Output Layer: At the end, it has7 classes with
Softmax
We have used, for training, the Keras deep
learning framework with a Tensor Flow backend on a
laptop with an i5-2320 (3.00GHz) CPU. The network
has been trained using Adam optimizer, and
Categorical Cross Entropy as loss function. After
several attempts of parameter tuning, the best results
are obtained at epoch 2000 using a learning rate of 10-
5 with an initial training rate set to 0.001, a batch size
of 30, 0 padding and stride (1, 1) for all convolution
layers.
Figure 4: The overall structure of the pipeline.
2.3.1 Performance on Collected Dataset
Our dataset is challenging because of the following
reasons:
(i) High interclass similarity: some actions are
very similar to each other, for example,
Coming/Going, and Hello/Call.
(ii) High intra-class variability: the same action is
performed in different ways by the same
subject. For example, using left, right, or both
hands differently.
(iii) The activity sequences are registered from
different views.
Our dataset has been divided into two parts; 75%
for training and 25% for testing.
The performance of HAR has been evaluated
based on the accuracy percentage of activities that are
correctly recognized. The result shown in the
confusion matrix achieves accuracy of 97.42%
(Figure5).
Figure 5: Confusion matrix.
2.4 The Online Processing
- Human Activity Prediction package: The developed
HAR module has been implemented under Robot
Operating System (ROS), to recognize the performed
activity by the service robot.
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
108
- Autonomous Social Navigation package: This is
built from ROS navigation stack, given the current
locations of obstacles; it uses the global planner to
find a path to a desired destination. It then uses a local
planner to compute linear and angular velocities that
need to be executed by the robot to approximately
follow the global path while avoiding obstacles and
humans differently respecting some social rules
(Bellarbi , A, et al., 2016).
- Simultaneous Localization and Mapping (SLAM):
we used Hector Slam package, which provides robot
position and an environment map, for self-
localization.
Once the activity is recognized by the prior step,
the appropriate reaction is taken from the look-up
table to be executed by the mobile robot in real
interaction scenarios (Table1).
The robot can perform motion or voice reaction;
for the voice reaction, we have used a speech
synthesis module to play sound from a given input
text.
Table 1: Six common types of interaction.
Activity Robot reaction
Hello Voice reaction : Hello welcome to CDTA
Call
Voice reaction : Please wait, I am coming
Motion reaction: Approaching user and start
interaction.
Stop
Voice reaction: Ok, I will stop here.
M
otion: Stop moving.
Pointing
Voice reaction: Ok, I will go there.
M
otion reaction: Go to the pointed position.
Coming
Voice reaction: How can I help you?
Motion reaction: Step back and prepare to begin
interaction.
Going
Voice reaction: Good-bye, thank you for your visit.
M
otion: turn
b
ac
k
and stop interaction
3 RESULTS AND DISCUSSIONS
3.1 Performance on Public Datasets
We present a comparative performance evaluation on
two public datasets: the CAD-60 and KARD HAR
datasets.
The CAD-60 dataset (Sung, J, et al. 2012) is
performed by 12 different activities, typical of indoor
environments that are performed by four different
people: two males and two females.
The KARD dataset (Gaglio, S. et al. 2014) consists
of 18 activities. This dataset has been captured in a
controlled environment, that is, an office with a static
background, and a Kinect device placed at a distance
of 2-3m from the subject. The activities have been
performed by 10 young people (nine males and one
female), aged from 20 to 30 years, and from 150 to
185cm tall. Each person repeated each activity 3
times in order to create 540 sequences. The dataset is
composed of RGB and depth frames. Additionally, 15
joints of the skeleton in world and screen coordinates
are provided.
Table2 lists the results of the proposed method,
which are applied on the above mentioned datasets.
Despite its simplicity, it is able to achieve good
results when applied to publicly available datasets
Table 2: Comparison of our method on different dataset.
Dataset Accuracy
KARD 95.0%
CAD60 83.19%
Our dataset
97.42%
Table 3 shows a comparison of the proposed
method with other state of the art approaches on
CAD-60. It can be seen from Table3 that despite very
good accuracy obtained with different methods in the
last decade, accuracy of the proposed activity
recognition approach outperforms existing
approaches. The proposed system achieved an
accuracy of 83.19 %.
Table 3: Comparison of accuracy on CAD60 dataset.
Algorithm proposed by Accuracy
Zhu et al. (2014) 62.5%
Yang et al.(2014) 71.9 %
Rahmani et al. (2014) 73.5%
Zhang et al.(2012) 81.8 %
Wang et al.(2013) 74.7%
Gaglio et al. (2014) 77.3%
Koppula et al.(2013) 80.8%
Nunes et al. (2017) 81.8 %
Proposed approach 83.19%
3.2 Performance on Mobile Robot
In order to properly test the system in real scenarios,
we have used the B21r mobile robot, which is able to
map the indoor environment and to self-localizing
and autonomously navigating while avoiding
obstacles and humans. The developed HRI system
has been implemented under Robot Operating System
(ROS). For real time prediction, we used the last
Human Action Recognition using Convolutional Neural Network: Case of Service Robot Interaction
109

recorded sequence during one second, according to
the sensor's refresh rate (30 fps) after being pre-
processed. After that, a final decision is made for
activity recognition and a robot reaction is performed.
Figure 6: Older scenario with GUI.
Figure 6 shows the older scenario of HRI:
a) To call the robot, the user has to scan using his
Smartphone, the QR code associated to its real
word position.
b) The real world map, where some predefined
positions in the environment are predefined such
as: Conference room, Library, Entrance, Robot
room. Hence, the robot must generate an
appropriate collision free trajectory and
navigate until reaching its goal.
c) The Guide User Interface GUI to control the
robot through its screen touch which displays
some functionality such us: Call the robot,
Follow Me, Guide Me.
Figure 7 shows the new scenario where a person
attempts to interact with a service robot:
a) First, the person Calls the robot from its distant
initial position (robot room) by scanning the QR
code associated to its position using its smart
phone.
b) The robot navigate until the user position, detect
the person and start interaction with him, the
user salutes the robot, ‘Hello’ action is
recognized and the robot react with voice mode
and say: ‘Hello, welcome to our Center’.
c) The user is pointing to a specific position; the
activity is recognized as “pointing”, and the
voice reaction of the robot is: “Ok, I will go
there”, and the robot move to the pointed
position.
The proposed framework was capable of
recognizing different interactive activities that
happen sequentially in case of a person transits from
one activity to another.
(a)
(b)
c)
Figure 7: Natural interaction scenario: Distant Call – Hello-
Pointing.
Figure 8 shows a second natural interaction scenario
where:
i) The person is calling the robot in its proximity,
and the activity is recognized as “Call” and
then the robot interacts with voice mode, and
say: “Please wait, I am coming”, while
approaching the user.
ii) The user decides to stop the robot; the activity
is recognized as “Stop”, and the robot stop
moving, and say: “ok, I will stop here”.
iii) The user decides to go away, the activity
“Going” is recognized and the robot react with
voice: “Good- bye, thank you for your visit”,
and turn back and stop interaction.
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
110

(i)
(ii)
(iii)
Figure 8: Scenario b) Proximity Call – Stop – Going.
4 CONCLUSION
We presented a Human Robot Interaction system for
a service robot, able to recognize the performed
activity and to successfully react according to the
situations. In the pre-processing step, we have
proposed a view invariant transformation applied to
the data, captured by a Microsoft Kinect camera to
guarantee view invariant features. To achieve features
dimensionality reduction, an analysis of the most
informative joints has been performed while
concentrating on significant joints which highly
contribute to the human activity. Therefore, five
significant joints in the human skeleton have been
selected and used as input layer of a deep CNN. This
model has been tested in real time successfully,
hence, it presents a promising approach to social
robotics field where natural and intuitive human robot
interaction is needed. However, some further
developments are needed before the system can be
used in a real life. Therefore in the future, we want to
consider the use of other sensor modalities such as
depth maps and RGB sequences in order to add
additional contextual information and see what the
best architecture to fuse all these modalities is. This
should improve the activity recognition accuracy and
consequently will improve the interactivity of our
service robot.
REFERENCES
Bellarbi, A., Kahlouche, S., Achour, N., & Ouadah, N.
(2016, November). A social planning and navigation
for tour-guide robot in human environment. In 2016 8th
International Conference on Modelling, Identification
and Control (ICMIC) (pp. 622-627). IEEE.
https://doi.org/10.1109/ICMIC.2016.7804186.
Borja, J. A. T., Alzate, E. B., & Lizarazo, D. L. M. (2017,
October). Motion control of a mobile robot using kinect
sensor. In 2017 IEEE 3rd Colombian Conference on
Automatic Control (CCAC) (pp. 1-6). IEEE.
Faria, D. R., Vieira, M., Premebida, C., & Nunes, U. (2015,
August). Probabilistic human daily activity recognition
towards robot-assisted living. In 2015 24th IEEE
international symposium on robot and human
interactive communication (RO-MAN) (pp. 582-587).
Gaglio, S., Re, G. L., & Morana, M. (2014). Human activity
recognition process using 3-D posture data. IEEE
Transactions on Human-Machine Systems, 45(5), 586-
597.
Hascoet, T., Zhuang, W., Febvre, Q., Ariki, Y., &
Takiguchi, T. (2019). Reducing the Memory Cost of
Training Convolutional Neural Networks by CPU
Offloading. Journal of Software Engineering and
Applications, 12(8), 307-320. doi: 10.4236/jsea.2019.1
28019.
Kahlouche, S., & Belhocine, M. (2019, November). Human
Activity Recognition Based on Ensemble Classifier
Model. In International Conference on Electrical
Engineering and Control Applications (pp. 1121-1132).
Springer, Singapore. https://doi.org/10.1007/978-
981-15-6403-1_78
Kahlouche, S., Ouadah, N., Belhocine, M., &
Boukandoura, M. (2016, November). Human pose
recognition and tracking using RGB-D camera. In 2016
8th International Conference on Modelling,
Identification and Control (ICMIC) (pp. 520-525).
IEEE. DOI: 10.1109/ICMIC.2016.7804168.
Koppula, H. S., Gupta, R., & Saxena, A. (2013). Learning
human activities and object affordances from rgb-d
videos. The International journal of robotics research,
32(8), 951-970.
Human Action Recognition using Convolutional Neural Network: Case of Service Robot Interaction
111

Limin, M., & Peiyi, Z. (2017, March). The medical service
robot interaction based on kinect. In 2017 IEEE
International Conference on Intelligent Techniques in
Control, Optimization and Signal Processing (INCOS)
(pp. 1-7). IEEE.
Nunes, U. M., Faria, D. R., & Peixoto, P. (2017). A human
activity recognition framework using max-min features
and key poses with differential evolution random
forests classifier. Pattern Recognition Letters, 99, 21-
31.
Ofli, F., Chaudhry, R., Kurillo, G., Vidal, R., & Bajcsy, R.
(2014). Sequence of the most informative joints (smij):
A new representation for human skeletal action
recognition. Journal of Visual Communication and
Image Representation, 25(1), 24-38.
Rahmani, H., Mahmood, A., Du Huynh, Q., & Mian, A.
(2014, September). HOPC: Histogram of oriented
principal components of 3D pointclouds for action
recognition. In European conference on computer
vision (pp. 742-757). Springer, Cham.
Simonyan, K., & Zisserman, A. (2014). Very deep
convolutional networks for large-scale image
recognition. arXiv preprint arXiv:1409.1556.
Sung, J., Ponce, C., Selman, B., & Saxena, A. (2012, May).
Unstructured human activity detection from rgbd
images. In 2012 IEEE international conference on
robotics and automation (pp. 842-849). IEEE.
Suriani, S., Noor, S., Ahmad, F., Tomari, R., Nurshazwani,
W., Zakaria, W. W., & Mohd, M. H. (2018). Human
activity recognition based on optimal skeleton joints
using convolutional neural network. Journal of
Engineering Science and Technology, 7, 48-57.
Wang, J., Liu, Z., Wu, Y., & Yuan, J. (2013). Learning
actionlet ensemble for 3D human action recognition.
IEEE transactions on pattern analysis and machine
intelligence, 36(5), 914-927.
Yang, X., & Tian, Y. (2014). Effective 3d action
recognition using eigenjoints. Journal of Visual
Communication and Image Representation, 25(1), 2-
11.doi.org/10.1016/j.jvcir.2013.03.001
Zhang, C., & Tian, Y. (2012). RGB-D camera-based daily
living activity recognition. Journal of computer vision
and image processing, 2(4), 12.
Zhao, X., Naguib, A. M., & Lee, S. (2014, August). Kinect
based calling gesture recognition for taking order
service of elderly care robot. In The 23rd IEEE
international symposium on robot and human
interactive communication (pp. 525-530). IEEE.
Zhu, Y., Chen, W., & Guo, G. (2014). Evaluating
spatiotemporal interest point features for depth-based
action recognition. Image and Vision computing, 32(8),
453-464.
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
112
