
Nonholonomic Robot Navigation of Mazes using Reinforcement Learning
Daniel Gleason
a
and Michael Jenkin
b
Electrical Engineering and Computer Science,
Lassonde School of Engineering, York University, Toronto, Canada
Keywords:
Robot Navigation, Reinforcement Learning, Navigating Mazes.
Abstract:
Developing a navigation function for an unknown environment is a difficult task, made even more challenging
when the environment has complex structure and the robot imposes nonholonomic constraints on the problem.
Here we pose the problem of navigating an unknown environment as a reinforcement learning task for an
Ackermann vehicle. We model environmental complexity using a standard characterization of mazes, and
we show that training on complex maze architectures with loops (braid and partial braid mazes) results in an
effective policy, but that for a more efficient policy, training on mazes without loops (perfect mazes) is to be
preferred. Experimental results obtained in simulation are validated on a real robot operating both indoors and
outdoors, assuming good localization and a 2D LIDAR to recover the local structure of the environment.
1 INTRODUCTION
There has been considerable success in applying deep
Reinforcement Learning (DRL) to robot navigation
both with (Faust et al., 2018) and without (Tai et al.,
2017; Devo et al., 2020; Wanmg et al., 2021) a
map. One concern with a number of existing DRL-
based approaches to the navigation problem is the
nonholonomic nature of most autonomous vehicles.
DRL-based approaches typically assume either holo-
nomic motion or differential drive vehicles with sep-
arately controllable linear and angular velocity. How
well do DRL-based approaches function when strong
nonholonomic motion constraints are considered, and
how is performance impacted when environments of
different complexity are considered for both train-
ing and evaluation? To address these concerns, here
we consider the application of End-to-End Reinforce-
ment Learning (E2E-RL) (Tai et al., 2017) to obtain
a navigation function for an Ackermann vehicle for
environments of different complexities, and compare
performance against a random action baseline and a
baseline based on Hierarchical Reinforcement Learn-
ing (HRL) (Faust et al., 2018) exploiting waypoints
obtained using a sample-based planning algorithm
(RRT*) (Karaman and Frazzoli, 2011). DRL-based
navigation functions are constructed through learning
on environments of different complexities and these
a
https://orcid.org/0000-0003-0816-5689
b
https://orcid.org/0000-0002-2969-0012
navigation functions are evaluated on environments of
different complexity as well.
The main contributions of this paper are:
• We demonstrate that DRL can be used to provide
effective navigation control for a nonholonomic
vehicle operating in a maze-like environment.
• We demonstrate that training on different environ-
mental complexity classes impacts vehicle perfor-
mance, with training on more complex environ-
ments – particularly environments with loops –
resulting in more robust navigation while training
on simpler environments – environments without
loops – resulting in more efficient navigation.
The remainder of this paper is structured as fol-
lows. Section 2 describes previous work in DRL-
based navigation, on sampling-based path planning,
and on the classification of maze complexity. Sec-
tion 3 describes the formulation of maze navigation
using DRL used in this work. Section 4 describes ex-
perimental results and with a skid-steer robot simulat-
ing a vehicle using Ackermann steering in both indoor
and outdoor environments. Finally, Section 5 sum-
marizes the work and provides suggestions for future
work.
Gleason, D. and Jenkin, M.
Nonholonomic Robot Navigation of Mazes using Reinforcement Learning.
DOI: 10.5220/0011123600003271
In Proceedings of the 19th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2022), pages 369-376
ISBN: 978-989-758-585-2; ISSN: 2184-2809
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
369

2 PREVIOUS WORK
2.1 Deep RL for Continuous Action
Spaces
Reinforcement Learning (RL) is a category of Ma-
chine Learning where the goal is to train a software
agent to take actions in an environment which maxi-
mizes the cumulative reward it receives. Deep Rein-
forcement Learning (DRL) has been successfully ap-
plied to a wide range of difficult problems, such as
Atari games (Mnih et al., 2013), Go (Silver et al.,
2016), and 3D locomotion (Schulman et al., 2015).
DRL has also been shown to work well for both map
and mapless robot navigation with continuous control
(Faust et al., 2018; Tai et al., 2017).
In RL and DRL the task is modelled as a Markov
Decision Process (MDP). At each time step, the agent
observes the state of the environment, s
t
, then takes an
action, a
t
. Based on this state-action pair, (s
t
,a
t
), the
agent receives a reward, r
t
, and the agent transitions
to the next state, s
t+1
. The way in which the agent
chooses its actions is called the policy and is denoted
as π. Specifically, the policy defines the probability of
taking a possible action given the current state, writ-
ten as π(a
t
|s
t
).
The agent’s goal is to find the policy which maxi-
mizes its cumulative reward. Reinforcement Learning
(RL) methods can be broadly defined as being either
Policy-based or Value-based. Policy-based methods
aim to learn the optimal policy directly, while Value-
based methods aim to learn the value of each action
in a given state, meaning that the optimal policy is to
choose the action with the highest value. Actor-Critic
methods (Mnih et al., 2016) are a category of Rein-
forcement Learning methods which combine Policy-
based and Value-based learning. The Actor learns the
policy directly while the Critic learns a value function
to use to reduce the variance when training the Ac-
tor. Soft Actor-Critic (SAC) is an off-policy, Actor-
Critic algorithm which incorporates entropy regular-
ization (Haarnoja et al., 2018). In this work we use
Soft Actor-Critic (SAC) algorithm (Haarnoja et al.,
2018) as it has been shown to be an effective deep
RL algorithm for continuous action spaces.
2.2 Deep RL for Mapless Navigation
Tai et al. (2017) use End-to-end deep Reinforcement
Learning to solve mapless navigation for a differential
drive robot. The robot is able to generalize to unseen
environments and transfer a policy learned in simu-
lation to real-world environments with no additional
training. They use sparse range findings from a LI-
DAR for obstacle detection so as to reduce the gap
between simulation and the real world. The output
action of their RL algorithm is the linear and angu-
lar velocities the robot should use to move. For their
deep RL algorithm they used Asyncronous Actor-
Critc (A3C) (Mnih et al., 2016). The work reported
here is motivated by the approach described in Tai et
al. (2017).
2.3 Sample-based Path Planning
Sample-based path planning methods use random
sampling of the environment to overcome the compu-
tational cost of complete planning algorithms (Dudek
and Jenkin, 2000). While not all sample-based meth-
ods are guaranteed to find an optimal path, like a
search of the entire configuration space would, they
can often find a valid path much more quickly(Dudek
and Jenkin, 2000). Here we use RRT* (Karaman and
Frazzoli, 2011), an optimized version of the Rapidly
Exploring Random Tree (RRT) algorithm (Lavalle,
1998) as an informed baseline to evaluate a DRL-
based navigation function. We perform local path fol-
lowing using a DRL-based path following process to
deal with the constraints introduced by Ackermann
steering. We refer to this approach as hierarchical
reinforcement learning (HRL). HRL provides a base-
line that separates the problem of path following from
path execution but which still meets the requirements
of Ackermann-based steering.
2.4 Types of Mazes
Mazes and labyrinths have a long history (see
Matthews, 1972, for a review). Although the terms
maze and labyrinth are often used interchangeably,
the terms are traditionally used to define different
structures. The term maze refers to a complex branch-
ing path structure while the term labyrinth refers
to a single-path structure with no branching paths.
There exists a standard taxonomy of maze subgroups
(Pullen, 2020). Of particular interest in this work
are labyrinths and the perfect maze, braid maze, and
partial-braid maze subgroups. For the labyrinth and
each of the maze types we identify two specially
marked locations, a start location, and a single goal
location. In terms of the environment structure: A
labyrinth is a maze with only one path. The agent
can move from the start to the goal without having
to make any decisions about which path to take. A
perfect maze has no loops and can be described as
a tree of labyrinths.A braid maze is a maze without
any dead ends, which can be thought of as a labyrinth
with loops. A partial-braid maze is a braid maze with
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
370

Figure 1: Sample 7x7 mazes. The upper left quadrant shows
four labyrinths, the upper right four braid mazes, the lower
left four partial braid mazes and the lower right four per-
fect mazes. The robot is simulated in each maze along with
its simulated LIDAR shown as a collection of blue rays.
The robot’s position is at the intersection of these rays. The
robot’s goal location is identified by a dot.
dead ends, which is the most difficult type of maze to
solve. Figure 1 provides examples of 7x7 maze envi-
ronments from these groups.
3 MAZE NAVIGATION USING
DRL AND HRL
In Tai et al. (2017) , RL-based path planning is con-
sidered in the context of a differential drive vehicle
operating under the assumption that the vehicle has
independent control of its linear and angular veloc-
ity. Such a policy is not possible for an Ackermann
drive vehicle in which changes in position and orien-
tation are more tightly linked. This constraint limits
the paths that the robot can take and makes the navi-
gation and path planning tasks more complex.
The RL component of the local planning for HRL
and the end-to-end planning for E2E-RL is defined
by three aspects: the state space, the action space,
and the reward function, as described below:
State Space. The state space includes obstacle
range findings and the orientation of the robot.
The obstacle range information models a LIDAR
sampling nine equally spaced orientations from
−π/2 to π/2 radians about zero, the straight ahead
direction. For the HRL approach only, the state
space includes the next n way points along the path,
provided by RRT*, as the x and y displacements
from the vehicle’s current position to the way points.
If there are less than n points left in the path, the
last point (the goal) is repeated to ensure there are n
points in the state. E2E-RL is only provided with the
x and y displacement to the goal point. All of these
values are normalized as follows: the range findings
by dividing the observed distance by the maximum
distance, the orientation by dividing by 2π, and the x
and y distances by dividing by the environment width
and length respectively.
Action Space. The robot’s linear velocity V is
set to a constant, meaning the vehicle always moves
forward. The RL agent controls the steering amount.
The steering amount is a value between -1 and 1, cor-
responding to a change in the vehicle’s steering angle
equal to: (V θ)/(L ∗ C). Where V is the vehicle’s
velocity, L is the vehicle’s length, C is a constant to
control the minimum turning radius of tairpe vehicle,
and θ is the steering amount. We selected a value of
C which corresponded to a minimum turning radius
approximately equal to the length of the robot.
Reward Function. The reward function is sim-
ilar for both HRL and E2E-RL, with a slight addition
to HRL to incorporate a reward for following the path.
There is a max and min reward. Both approaches
receive the max reward if they reach the goal and
the min reward if they hit an obstacle, with both of
these events terminating the episode. Otherwise, both
receive an intermediary reward:
−
1
|R|
∑
r∈R
(1 − r)
2
Where R is the set of range finding rays and r is a par-
ticular ray’s normalized distance value. This rewards
the RL agent for staying away from obstacles. The
reward is framed as minimizing a negative function to
incentivize the agent to end the episode as quickly as
possible. Given that some of the environments con-
tain loops, if this intermediary reward were positive
the agent would be more likely to drive in a loop until
the episode ends than attempt to reach the goal.
HRL receives an additional intermediary reward
when it reaches a certain distance ε from the next
point in the path. This reward is equal to the max re-
ward divided by a constant K. When this occurs, the
point is removed from the path and the next n points
in the state are updated. The ε term controls how
closely the path must be followed by the agent. Since
for HRL the robot has the constraints of Ackermann
steering but we are using straight-line connections for
the points, ε must be sufficiently large to allow for the
necessary deviations from the path.
Nonholonomic Robot Navigation of Mazes using Reinforcement Learning
371

4 EXPERIMENTAL RESULTS
4.1 Maze Generation
Python-Maze (Turidus, 2017) is used to generate the
braid, partial-braid, and perfect mazes. These mazes
are generated by selecting random start and goal
blocks, with the condition that one must be on the top
row and the other on the bottom. Then a perfect maze
is generated between the selected start and goal. For
braid and partial-braid, Python-Maze has an option
which adds a percentage of loops to the maze, which
was set to 100% for braid and 25% for partial-braid
mazes.
Labyrinths are generated using a custom script.
We randomly select start and goal blocks anywhere
in the grid, with the only condition being that the eu-
clidean distance between the two blocks be greater
than a minimum distance Min. Min was set to 4 for
the 7x7 mazes and 5 for the 9x9 mazes. Once the start
and goal are selected, the algorithm randomly walks
through the maze by blocks of two, starting at the start
block, removing the walls it passed through. As we
are generating labyrinths, the algorithm is not allowed
to walk through blocks which had already been vis-
ited. The algorithm runs until it reaches the goal or
gets stuck. If it gets stuck the algorithm is restarted.
This process is repeated until a labyrinth is created
that connects the start and goal blocks.
In order to provide an equitable comparison be-
tween the various maze classes (including labyrinth),
we embed the maze structure on a rectangular grid in
which one grid square is approximately 3 times the
length of the vehicle and we assume that the mini-
mum turning radius of the vehicle is approximately
equal to the vehicle’s length. The minimum obsta-
cle is a square with a side length of approximately
three times the length of the vehicle. Obstacles fill in
an entire block in the underlying representation. See
Figure 1 for examples.
4.2 Hyperparameters
Both HRL and E2E-RL were trained using the Sta-
ble Baselines (Hill et al., 2018) RL baselines. If not
mentioned, the default hyperparameters were used.
Both HRL and E2E-RL were trained using the SAC
(Haarnoja et al., 2018) algorithm with a network ar-
chitecture of 3 layers of size 512. This network ar-
chitecture was used for the policy, value function, and
both Q-value functions. Training was performed on
mazes and labyrinths of size 7x7. Evaluation was per-
formed on mazes and labyrinths of size 7x7 and 9x9.
The best model during training was selected by
evaluating the current policy every K timesteps for M
episodes, using a deterministic version of the policy,
and saving the policy with the highest average reward
across the evaluation episodes.
4.2.1 HRL
For the HRL approach, we trained for 1m timesteps
with a replay buffer of 1m timesteps, which took ap-
proximately 10 hours. The policy was evaluated ev-
ery 30k timesteps for 20 episodes. The episode length
was 1.5k timesteps.
4.2.2 E2E-RL
For the E2E-RL approach, we trained for 2m
timesteps with a replay buffer of 2m timesteps, which
took approximately 20 hours. The time varied slightly
depending on the maze type, as ones with more walls
took longer due to the increase in the number of col-
lision checks per timestep. The policy was evaluated
every 45k timesteps for 205 episodes. The episode
length was 4.5k timesteps. We trained for longer on
E2E-RL because it took longer for the agent to learn,
likely due to the increased challenge of the task. We
used a longer episode length as the agent was not fol-
lowing an optimal path and thus could take longer to
reach the goal.
4.3 Simulation
In order to better understand the performance of the
path planning performance of RL, we compare per-
formance against a baseline HRL approach similar to
Faust et al. (2018) in which RRT* is used to solve the
path planning task and RL is used to execute the iden-
tified path subject to the constraints of Ackermann
steering. Evaluation is performed in simulation using
randomly generated environments from the labyrinth,
braid, partial-braid and perfect maze types. A random
action policy baseline is also reported.
4.3.1 HRL Baseline
For the HRL baseline we trained on braid mazes and
tested on all four mazes classes (Table 1). Since
the agent is following a path obtained using RRT*
for all mazes, we developed a single baseline. As
shown in Table 1, training on braid mazes is sufficient
for at least 95% success on braid, partial-braid, and
perfect mazes. The agent’s performance dropped on
labyrinths, possibly due to the fact that in a labyrinth
there was slightly less space to maneuver at each turn,
given that in a labyrinth three of the four sides are
walls, whereas in the other maze types, there are at
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
372

Table 1: HRL baseline successes out of 100 trails on 7x7
mazes.
Test →
Train ↓
Laby-
rinth
Braid Partial
Braid
Perfect
Braid 78 95 96 96
least two openings at each turning section. (See Fig-
ure 1 for examples of this.) The presence of two or
more empty squares allows the agent to execute a
wider turning arc.
The primary purpose of the HRL-baseline was to
demonstrate that with sufficient map information, the
RL approach was capable of overcoming the restric-
tions imposed by Ackermann steering given the tight
confines of the environments being used.
4.3.2 Random Action Baseline
Given the start and goal locations, the random search
randomly selects adjacent squares which are not
blocked by an obstacle to move to, with the only con-
dition being that it cannot travel to its previous square.
This mimics the behaviour of our Ackermann sim-
ulations, which cannot move backwards. This pre-
vents the random policy from turning into walls “ac-
cidentally”, but the random policy will fail if it enters
a dead end. The random baseline does not enforce
Ackermann constraints on the motion of the vehicle.
The algorithm is run until it reaches the goal square,
crashes at a dead end, or exceeds a maximum number
of steps. Figure 2 shows the probability of success of
the algorithm on a given maze type after a given num-
ber of steps. Each data point was gathered by run-
ning the algorithm on 100 mazes of the given class.
For labyrinth and braid mazes in which there are no
dead ends, the algorithm can only fail by exceeding
the maximum steps, the probability of success will
eventually equal 1. Given the impossibility of failure,
we do not report the random policy’s performance in
Tables 2 or 3.
For both the random baseline and E2E-RL, on per-
fect mazes we assume that the first step taken does not
strike a wall. The reference angle of the robot is set in
E2E-RL before we run it, and we select an angle that
gives the agent a chance to reach the goal. Therefore
we give the same benefit to the random search for the
sake of a fair comparison.
4.3.3 E2E-RL
We investigate the performance of E2E-RL on eval-
uation sets of size 100 on 7x7 mazes (Tables 2 and
4), which is the size they were trained on, and on
100 mazes of size 9x9 (Table 3, 5) which represents a
more complex maze than the training set.
(a) 7x7 mazes
(b) 9x9 mazes
Figure 2: Probability of success for random baseline on dif-
ferent maze sizes. Each data point represents running the
algorithm on 100 mazes.
The E2E-RL agents trained on partial-braid and
perfect mazes significantly outperform the random
search policy on mazes with dead ends (partial braid
and perfect mazes). Interestingly, the agent trained on
braid mazes did not outperform a random search on
partial-braid mazes. This may be because the lack of
dead ends in braid mazes led the agent to focus on
learning optimal local path execution rather than op-
timal global navigation. This is supported by the fact
that the braid maze agent outperformed all the agents
on the labyrinth mazes, even the labyrinth agent itself.
For both 7x7 and 9x9 mazes the agent trained on
labyrinths performed well on labyrinths and poorly
on the rest. This was expected as this agent had no
need to learn any global navigation behaviour and
could focus solely on local path execution. For 7x7
mazes it is interesting that the agent trained on braid
mazes outperformed the labyrinth agent on its own
maze type. A potential reason for this is that the braid
agent was exposed to more variety in training due to
the numerous paths available given the loops, while
the labyrinth agent was exposed to more simple struc-
tures during training. Perhaps the most striking result
is that the partial braid agent performs very well (the
best or very close to the best) on all classes on the
9x9 maze evaluation. Again, this may be the result of
Nonholonomic Robot Navigation of Mazes using Reinforcement Learning
373
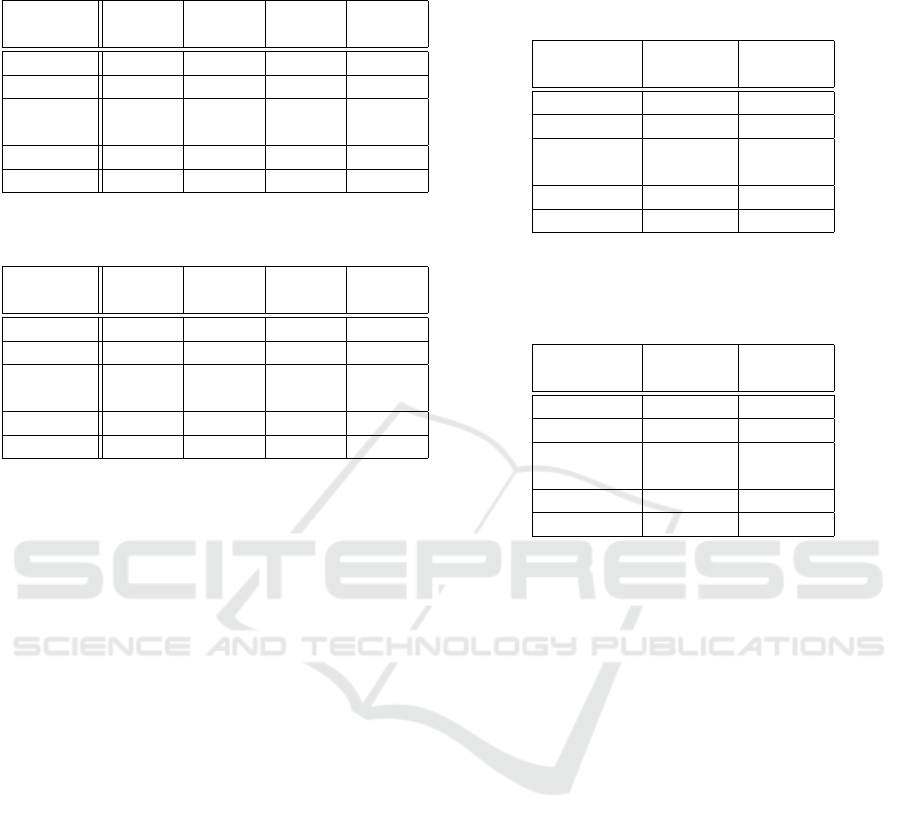
Table 2: E2E-RL successes out of 100 trails on 7x7 mazes.
Best performing policy is in bold.
Test →
Train ↓
Laby-
rinth
Braid Partial
Braid
Perfect
Labyrinth 94 34 23 20
Braid 96 64 35 32
Partial
Braid
83 80 64 49
Perfect 68 78 62 51
Random - - 37 22
Table 3: E2E-RL successes out of 100 trails on 9x9 mazes.
Best performing policy is in bold.
Test →
Train ↓
Laby-
rinth
Braid Partial
Braid
Perfect
Labyrinth 89 29 17 12
Braid 94 52 15 11
Partial
Braid
85 71 46 36
Perfect 53 65 44 34
Random - - 24 9.5
training against more complex environments.
When comparing path lengths for braid and
partial-braid mazes, we selected a maximum number
of steps for the random policy. (Had we not, the ran-
dom policy might never complete when run on braid
or partial braid mazes.) We use a maximum number
of steps cutoff for which the random policy demon-
strated a performance equal to the average perfor-
mance of all the E2E-RL agents over all maze types.
Table 4 reports path length results for 7x7 mazes
and Table 5 reports path length results for 9x9 mazes.
For 7x7 mazes on all classes except labyrinth and
braid, the policy trained on partial braid and perfect
mazes performed best, with the policy trained on per-
fect mazes performing the best on 9x9 mazes over
both braid and partial braid environments. With the
exception of the random policy on the labyrinth and
braid classes, the policy trained on partial braid mazes
was more likely to succeed, especially as 9x9 mazes
were considered, yet the policy trained on perfect
mazes found the path most quickly.
For the labyrinth and braid mazes, the random pol-
icy is guaranteed to find a solution if run for a suffi-
ciently long time as the random policy does not set the
turning angle but rather just identifies the next empty
block. As it cannot crash the vehicle, and there are
no dead ends, eventually it will be successful. For
the other policies, the policy does choose the turning
angle and thus even for labyrinth and braid mazes,
failure of the policy is a possible outcome.
Table 4: E2E-RL average path length for successes on 7x7
mazes over 100 trials. 1 unit = width of a cell. Lower
values are better. Best performing policy for each test class
is in bold.
Test →
Train ↓
Braid Partial
Braid
Labyrinth 16.94 11.83
Braid 14.69 13.31
Partial
Braid
11.85 11.00
Perfect 11.95 10.46
Random 19.59 15.85
Table 5: E2E-RL average path length for successes on 9x9
mazes over 100 trials. 1 unit = width of a cell. Lower
values are better. Best performing policy for each test class
is in bold.
Test →
Train ↓
Braid Partial
Braid
Labyrinth 22.69 16.70
Braid 22.27 20.00
Partial
Braid
16.39 14.17
Perfect 15.14 13.63
Random 27.08 22.98
4.4 Real World Validation
The simulations used above make strong assumptions
about the ability of a robot to obtain good odometry
and orientation information, and to be able to capture
and use simulated LIDAR to obtain state information
about obstacles in the environment. In order to vali-
date these assumptions we conducted indoor and out-
door experiments with a wheeled mobile robot. These
experiments did not validate end to end performance
of the policies developed here, but rather were used
to validate the ability of obtaining state information
and providing action information to a real robot. For
real world experiments, a E2E-RL navigation func-
tion trained on braid mazes.
Experiments were performed using an Adept skid-
steer P3-AT base augmented with LIDAR, GPS re-
ceiver, gyroscope and on board computation. The
P3-AT’s skid steer was used to simulate Ackermann
kinematics. Given the size of the P3-AT, for real
world validation the cell size in the maze was set to
2.2m x 2.2m. Space did not permit testing on full
7x7 mazes, as such mazes would require 15m x 15m
testing environments and the construction of hundred
of meters of temporary walls, so real world experi-
ments were limited to smaller maze structures to ex-
plore the ability of the E2E-RL algorithm to navigate
complex junctions and corners in the maze. Custom
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
374

(a) Indoor environment (b) Outdoor environment
(c) Indoor navigation (d) Outdoor navigation
Figure 3: Real world navigation. Indoor and outdoor environments and snapshots of the motion of the robot as recorded by
ROS.
ROS nodes were developed to control the robot from
an off-robot control station. Uncertain weather condi-
tions required that experiments be conducted both in-
doors and out. For localization outdoors, a Real-Time
Kinematic (RTK) Global Positioning System (GPS)
(NovAtel, 2020) was used. For indoor localization,
where GPS signals were not available, hand measure-
ments were used as a replacement for the GPS mea-
surement. Although there are more precise automated
methods for indoor localization such as WiFi localiza-
tion (Sun et al., 2014), hand measurement was used
here. For orientation information a gyroscope (Pas-
saro et al., 2017) was used to determine orientation
and angular velocity. A Phidget Spatial sensor (Phid-
gets, 2020) was mounted on the robot and data pro-
vided to the ROS stack. For obstacle detection, the
YDLidar G4 was used. This LIDAR provides denser
samples than the nine used in the policies developed
here, but the signal was sampled to obtain the nine-
dimensional range signal.
4.4.1 Indoor Experiments
Indoor experiments were conducted in the Sher-
man Health Sciences Building at York University in
Toronto, Canada. In order to construct a sufficiently
complex environment of the correct scale, existing
walls in the building were supplemented with mov-
able wall obstacles that provided a wall like barrier
that could be captured by the LIDAR (Figure 3(a)).
Given the complexity of estimating vehicle position,
indoor experiments were quite time consuming, but
these demonstrated that the assumptions that under-
lie the DRL navigation algorithm applied in this envi-
ronment. The navigation function was successful for
100% on the three indoor environments constructed.
Each test required approximately 12m of robot mo-
tion through the maze. Figure 3(c) shows the success-
ful navigation of part of an indoor maze.
4.4.2 Outdoor Validation
Outdoor experiments were conducted on the con-
crete/stone apron adjacent to the Sherman Health Sci-
ences Building at York University (Figure 3(b)). This
apron was sufficiently large to permit a range of dif-
ferent junctions to be modelled and navigated. Four
test environments were constructed and the naviga-
tion function was successful in navigating all of them.
The paper “LIDAR walls” used to construct the en-
vironment were impacted by the windy conditions
present during the experiments, and the uneven con-
crete apron around the building impacted vehicle mo-
tion and LIDAR angle relative to the ground plane.
Although this produced a much more noisy LIDAR
signal (visible in Figure 3(d)) and introduced noise
into the motion executed by the vehicle, for the four
outdoor tests the robot was successful in making its
Nonholonomic Robot Navigation of Mazes using Reinforcement Learning
375

way to the goal location. Each test required approxi-
mately 15m of robot motion through the maze.
5 SUMMARY AND FUTURE
WORK
Evaluation of end-to-end RL on different environment
types with non-holonomic vehicles showed the ad-
vantage of training on more complex environments
(partial braid and perfect mazes) in terms of both
probability of success and the length of the found path
to the goal. Validation with real hardware demon-
strated that the assumptions made in terms of the E2E-
RL formulation were realistic.
ACKNOWLEDGEMENTS
This work was supported by the Natural Sciences and
Engineering Research Council (NSERC) through the
NSERC Canadian Robotics Network (NCRN).
REFERENCES
Devo, A., Costante, G., and Valigi, P. (2020). Deep
reinforcement learning for instruciotn following vi-
sual navigation in 3d maze-link environments. IEEE
Robotics and Autonomation Letters, January.
Dudek, G. and Jenkin, M. (2000). Computational Princi-
ples of Mobile Robotics. Cambridge University Press,
Cambridge, UK.
Faust, A., Ramirez, O., Fiser, M., Oslund, K., Francis,
A., Davidson, J., and Tapia, L. (2018). PRM-RL:
Long-range robotic navigation tasks by combining re-
inforcement learning and sampling-based planning. In
IEEE International Conference on Robotics and Au-
tomation (ICRA), Brisbane, Australia.
Haarnoja, T., Zhou, A., Abbeel, P., and Levine, S. (2018).
Soft actor-critic: Off-policy maximum entropy deep
reinforcement learning with a stochastic actor. Inter-
national Conference on Machine Learning (ICML).
Hill, A., Raffin, A., Ernestus, M., Gleave, A., A, K.,
Traore, R., Dhariwal, P., Hesse, C., Klimov, O.,
Nichol, A., Plappert, M., Radford, A., Schulman,
J., Sidor, S., and Wu, Y. (2018). Stable Baselines.
https://github.com/hill-a/stable-baselines.
Karaman, S. and Frazzoli, E. (2011). Sampling-based algo-
rithms for optimal motion planning. The International
Journal of Robotics Research, 30:846–894.
Lavalle, S. M. (1998). Rapidly-exploring random trees: A
new tool for path planning. Computer Science Depart-
ment, Iowa State University.
Matthews, W. H. (1927). Mazes and Labyrinths: Their
History and Development. Dover. Dover Publication
Reprint, 1970.
Mnih, V., Badia, A. P., Mirza, M., Graves, A., Lillicrap,
T. P., Harley, T., Silver, D., and Kavukcuoglu, K.
(2016). Asynchronous Methods for Deep Reinforce-
ment Learning. International Conference on Machine
Learning (ICML).
Mnih, V., Kavukcuoglu, K., Silver, D., Graves, A.,
Antonoglou, I., Wierstra, D., and Riedmiller, M.
(2013). Playing Atari with deep reinforcement learn-
ing. CoRR.
NovAtel (2020). Real-time kinematic (rtk).
https://novatel.com/an-introduction-to-gnss/chapter-
5-resolving-errors/real-time-kinematic-rtk. Accessed:
2020-07-30.
Passaro, V. M. . N., Cuccovillo, A., Vaiani, L., Carlo, M.,
and Campanella, C. E. (2017). Gyroscope technology
and applications: A review in the industrial perspec-
tive. Sensors, 17(10):2284.
Phidgets (2020). Phidgets spatial user guide.
https://www.phidgets.com/. (accessed August
12, 2020).
Pullen, W. D. (2020). Maze classification.
https://www.astrolog.org/labyrnth/algrithm.htm.
(accessed August 12, 2020).
Schulman, J., Moritz, P., Levine, S., Jordan, M., and
Abbeel, P. (2015). High-dimensional continuous con-
trol using generalized advantage estimation. CoRR.
Silver, D., Huang, A., Maddison., C., Guez, A., Sifre, L.,
van den Driessche, G., Schrittwieser, J., Antonoglou,
I., Panneershelvam, V., Lanctot, M., Dieleman, S.,
Grewe, D., Nham, J., Kalchbrenner, N., Sutskever, I.,
Lillicrap, T., Leach, M., Kavukcuoglu, K., Graepel,
T., and Hassabis, D. (2016). Mastering the game of
Go with deep neural networks and tree search. Na-
ture, 529(7587):484–489.
Sun, Y., Liu, M., and Meng, M. Q. (2014). Wifi signal
strength-based robot indoor localization. In IEEE In-
ternational Conference on Information and Automa-
tion (ICIA), pages 250–256, Hailar, China.
Tai, L., Paolo, G., and Liu, M. (2017). Virtual-to-real deep
reinforcement learning: Continuous control of mobile
robots for mapless navigation. In IEEE/RSJ Interna-
tional Conference on Intelligent Robots and Systems
(IROS), Vancouver, Canada.
Turidus (2017). Python-Maze.
https://github.com/Turidus/Python-Maze.
Wanmg, J., Elfwing, S., and Uchibe, E. (2021). Modular
deep reinforcement learning from reward and punish-
ment for robot navigation. Neural Networks, 135:115–
126.
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
376
