
Open-loop Control of a Soft Arm in Throwing Tasks
Diego Bianchi
1,2 a
, Michele Gabrio Antonelli
3 b
, Cecilia Laschi
4 c
and Egidio Falotico
1,2 d
1
The BioRobotics Institute, Scuola Superiore Sant’Anna, Pontedera, Italy
2
Department of Excellence in Robotics and AI, Scuola Superiore Sant’Anna, Pisa, Italy
3
Department of Industrial and Information Engineering and Economics, University of L’Aquila, L’Aquila, Italy
4
Department of Mechanical Engineering, National University of Singapore, Singapore, Singapore
Keywords:
Soft Robotics, Throwing, Open-loop Control, Neural Network.
Abstract:
This paper presents the implementation of an open-loop controller that allows a soft arm to throw objects
in target positions. This valuable ability enables the robotic arm to expand its working space by tossing the
objects outside it. Soft robots are characterized by high compliance and flexibility, which is paid in terms of
dynamics that is highly non-linear and therefore hard to be modelled. An artificial neural network is employed
to approximate the relationship between the actuation set and the target landing position, i.e., the direct model
of the task. An optimization problem is defined to find the actuation set necessary to throw in a desired target.
The proposed methodology has been tested on a soft robotic simulator (Elastica). Results show that the open-
loop controller allows throwing objects in a target position with an average error of 0.90 mm and a maximum
error of 10.47 mm, which compared to the characteristic dimension of the work-space correspond respectively
to 0.07 % and 0.83 %.
1 INTRODUCTION
Characterised by compliant materials, soft robots can
implement embodied intelligence principles, and they
can conform surfaces, which is unthinkable for tradi-
tional robots that are often designed to maximise the
accuracy and the overall performance of an operation.
Soft robots can absorb much of the energy followed
by a collision that reduces the possibility of harm, en-
abling low-cost human-safe operations (Laschi et al.,
2016). For these reasons, soft robotics is thought to
bridge the gap in the interaction between machines
and people (Rus and Tolley, 2015). Indeed, intrin-
sic compliance makes soft robots suitable for delicate
handling, unstructured environment exploration, ap-
plication in medicine (Cianchetti et al., 2018), and
safe-human interaction (Zlatintsi et al., 2020).
Even though much work has been done about the
design of this kind of robots, their control is still an
open challenge. Indeed, there is not a common strat-
egy that allows exploiting all of their characteristics.
a
https://orcid.org/0000-0001-7148-1612
b
https://orcid.org/0000-0001-8437-9131
c
https://orcid.org/0000-0001-5248-1043
d
https://orcid.org/0000-0001-8060-8080
More specifically, there are several challenges far to
be addressed related to the mismatch between the
high-dimension morphology of the soft manipulator
compared to its actuation system; in addition, there
is the problem of the time-varying of the soft mate-
rial characteristics that present a non-linear behaviour.
Moreover, due to its compliance, the soft robotic plat-
form is highly influenced by the environment (Chin
et al., 2020). For these reasons, even if there are ex-
amples in the literature of model-based controllers for
soft robotic arm (Della Santina et al., 2018), (Mahl
et al., 2013), (Alqumsan et al., 2019), a promising
alternative is represented by machine learning tech-
niques thanks to their ability to discover the under-
lying structure in the data without prior knowledge.
Even if, compared to analytical/numerical models,
machine learning methods require (large) data col-
lection, they allow learning the unknown model of a
system with reliable performance (Kim et al., 2021).
Machine learning has been used to create static (kine-
matic) and dynamic controllers. One of the first ex-
amples of inverse kinematics model learning in a
non-redundant soft robot based on neural networks is
shown in (Giorelli et al., 2013). This was further ex-
tended in (George Thuruthel et al., 2017) to account
for redundancies, based on the methods proposed in
138
Bianchi, D., Antonelli, M., Laschi, C. and Falotico, E.
Open-loop Control of a Soft Arm in Throwing Tasks.
DOI: 10.5220/0011267100003271
In Proceedings of the 19th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2022), pages 138-145
ISBN: 978-989-758-585-2; ISSN: 2184-2809
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
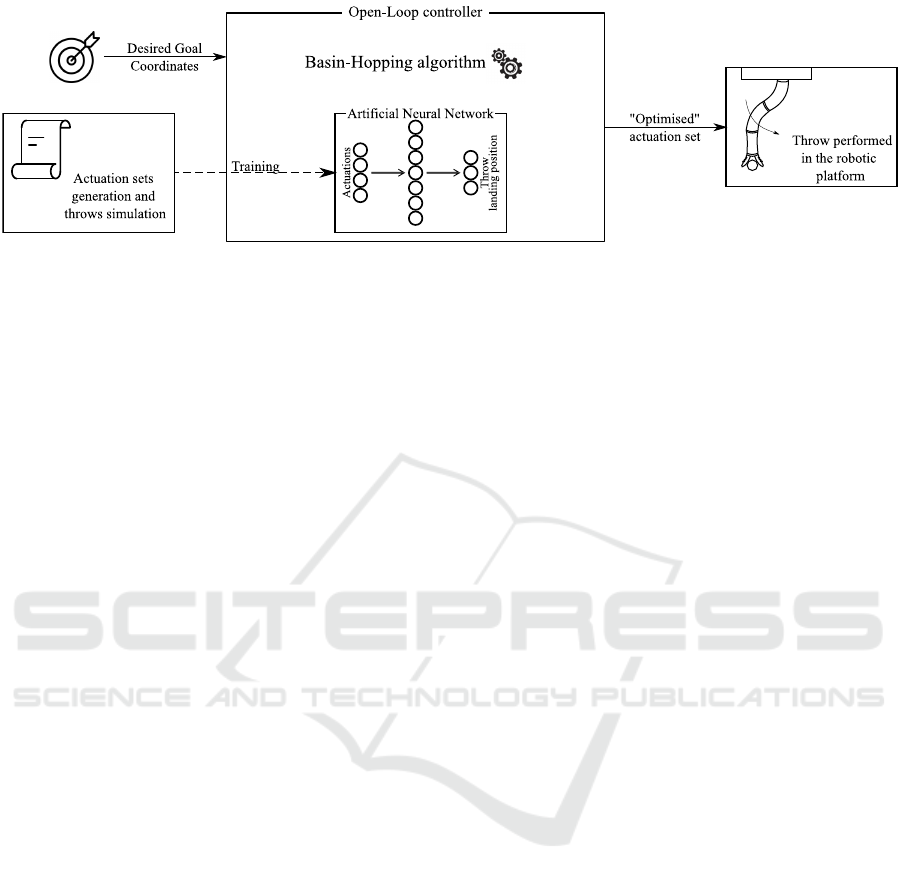
Figure 1: Methodology used in this work.
(Vannucci et al., 2014; Vannucci et al., 2015). How-
ever, this kind of controllers relies on the steady-state
assumption, which impedes the accurate and fast mo-
tion of a soft manipulators. In a dynamic scenario,
it is fundamental for a reliable controller to consider
all the dynamic effects associated with the different
sections of a manipulator. For this purpose, model-
free dynamic controllers have been developed. An
open-loop strategy is proposed by (Thuruthel et al.,
2018; Thuruthel et al., 2019) where a dynamic con-
troller is realized by running a trajectory optimisation
on a forward dynamic model obtained with a recur-
rent neural network. Even if it is characterised by
a low sensory requirement thanks to the model-free
approach, this strategy has been tested purely on a
trajectory tracking task. The same task is performed
in (Centurelli et al., 2021) in an open-loop controller
based on neural models and then extended in (Cen-
turelli et al., 2022) with a closed-loop dynamic con-
troller which has been trained by deep reinforcement
learning and it can deal with a payload attached to the
end-effector of the manipulator. A recent approach
considers the possibility to attach weights in differ-
ent positions of the manipulator to prove that a con-
tinual learning approach can be used to learn the dy-
namic models without forgetting (Piqu
´
e et al., 2022).
A comprehensive review on the control of soft ma-
nipulators can be found here (George Thuruthel et al.,
2018).
All the proposed approaches have been developed
for tracking tasks and are not suitable for ballistic
movements, where it is crucial to accurately reach the
point of release of the object with a predefined speed:
these are the two parameters that determine the range
of the throw.
In this work, we present a methodology that, for
the first time, allows a soft robot to perform ballistic
tasks, i.e., throwing an object towards the desired tar-
get. We developed the method presented in Section 2,
where also the soft robotic platform simulator is in-
troduced. In Section 3, each step of the methodology
is analysed on the platform and the results obtained
are shown. Section 4 concludes this work with some
considerations and some future improvements.
1.1 Related Works
This Section describes the principal work present in
literature about robots that perform throws with par-
ticular attention on the role of artificial intelligence
(AI). AI is used to increase the success rate of the
throws or, in general, the performance of a robot.
More specifically, in (Raptopoulos et al., 2020), the
authors propose to substitute the traditional pick-and-
place with the pick-and-toss for a cartesian robot em-
ployed in a waste sorting plant. It has been shown that
this substitution can expand the working space of the
robot, and in addition, they showed that this procedure
speeds up the sorting process increasing the speed by
15.3%. Here, AI is employed to classify the material
of the objects.
An interesting approach is presented in (Zeng
et al., 2020), where the authors present the Tossing-
Bot. This anthropomorphic robot can grasp an object
inside a drawer and toss it in a specific box placed
in front of it. In this case, a hybrid controller is
used. There is an analytical model which estimates
the control parameters of the robot. Then, a machine
learning-based controller is used to compensate for all
the phenomena that the numerical model cannot pre-
dict. These estimations are done with neural networks
that take input RGB images of the objects inside the
drawer and the target position coordinates. To make
the analytical model solvable, the authors imposed
some constraints to the movement by fixing the re-
leasing height, the realising speed angle, and the dis-
tance between the releasing point and the robot base.
Both these strategies, implemented on rigid robots,
cannot be used since they rely on the analytical robot
model that is not available for the soft robot.
Open-loop Control of a Soft Arm in Throwing Tasks
139

2 METHODOLOGY
In Figure 1 the proposed method is summarised. It is
possible to identify four main steps:
1. Actuation Sets Generation and Throws Simula-
tion. Since the proposed approach is data-driven,
this stage is one of the most important of the work.
Let us imagine having a reference frame where the
z-axis passes through the soft manipulator back-
bone; we decided that each trajectory has to lay
in one of the planes of the sheaf of planes whose
intersecting line is the z-axis. Furthermore, to in-
crease its speed, we decided to divide the move-
ment into a run-up phase and a forward phase,
where the robot moves in the opposite direction
with respect to a hypothetical target (run-up) and
the towards it (forward). We established that the
sphere is released when it reaches the maximum
speed, i.e., when the manipulator passes toward
the resting position in the forward phase. The
dataset is generated by performing several throws
and collecting the landing positions.
2. Network Training. After the generation of the
dataset, an artificial neural network is trained to
approximate the relationship between the actua-
tion set, i.e., the commands sent to the robot, and
the resulting landing position. The actuation input
includes the commands responsible for the two
phases in which we divided the movement.
3. Definition of the Optimisation Problem. On the
previously trained network, a minimisation prob-
lem is defined. We used the Basin-Hopping al-
gorithm to find the actuation set necessary to per-
form a throw in the desired target. In this prob-
lem, we minimise the distance between the goal
and the landing position associated with the tenta-
tive actuation set, which corresponds to our value
function. We noted that the precision of this
method is highly dependent on the relationship
between the two actuation sets responsible for the
run-up and the forward movement.
4. Performing a Throw. Using the actuation input
previously found at point 3, the throw is per-
formed. Since a neural network approximates a
function, there is always an approximation error.
Moreover, the optimisation algorithm can fail to
find the global minimum of the value function.
For these reasons, it is necessary to assess the ef-
fectiveness of the approach by comparing the ac-
tual landing position with the target one.
2.1 Soft Robotic Platform Simulator
The control strategy developed in this work has been
tested on an open-source simulator called Elastica
(Gazzola et al., 2018; Zhang et al., 2019). This
is based on Cosserat rods, and it takes into account
the bending, twisting, stretching, and shearing of the
modelled object. In particular, for our tests, we used
the Python version named PyElastica. This environ-
ment allows the simulation of soft robots, as shown
by the authors in (Naughton et al., 2021).
Figure 2: Elastica environment. In orange are shown the
directions in which are applied the internal torque to the
manipulator.
The soft arm is simulated by a single rod (whose
length is 1m), which has one extremity fixed in the
position {0, 0,0} while the other one is free to move.
A horizontal plane (parallel to the xy plane) is placed
1.5m below the base of the robotic arm. The rod,
which points downward, is actuated by applying inter-
nal torques distributed continually along the module
body. These were defined by first assigning the mag-
nitudes of the torques to three points equally spaced
on the arm and then interpolating them using a spline.
The direction of the torques is established during the
definition of the arm. In particular, we decided to
use a bi-directional scenario where it is possible to
identify the normal direction d
1
, perpendicular to the
body and the binormal direction d
2
, perpendicular to
both d
1
and the body. In this case, even if allowed by
the simulator, we decided not to consider the twist-
ing of the rod. The inputs to the simulator are hence
three couples of torque, with magnitudes in the range
[−0.5, 0.5] for a total of 6 actuations. For the sake
of simplicity, the other characteristics of the soft arm,
such as the Young or Poisson’s modulus, have been
left to the defaults values since our aim is just to test
the controller and our methodology.
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
140

As for the tossed object, we assume it is massless
and attached to the soft arm end-effector, until it is
released. Once released, the sphere follows the law
of the projectile, and it lands on the horizontal plane
beneath the soft arm.
A stylised representation of the simulated arm and
the overall system can be seen in Figure 2, which rep-
resents one of the several trajectories and throws sim-
ulated for acquiring the dataset. It also shows the di-
rections, d
1
and d
2
, in which torques are applied.
Figure 3: A) Normalised trend of one of the actuation set
components. b) Movement of the soft arm end-effector
along the z-axis. c) Generated dataset.
3 EXPERIMENTS AND RESULTS
3.1 Dataset Generation
As described in Section 2, the first step of our method-
ology is the dataset generation. Given an actuation set
τ, the respectively run-up actuation τ
ru
is calculated
thanks to the (1) and then applied to the manipulator
for 0.1s.
τ
ru
= −τ (1)
Once this phase ends, the forward one starts where the
actual actuation set τ is applied for another 0.1s. To
avoid having a step torque on the robot, we used the
smooth-step function as shown in Figure 3a. As ex-
plained in Section 2.1, since the internal torques mag-
nitudes are evaluated by an interpolation of the torque
magnitudes defined over three points by changing the
signs at the input values, we can obtain the same
movement in the opposite direction as described in
(1). In addition, we decided to apply each command
for 0.1 s because we wanted to avoid any undesired ef-
fect due to the transient response of the previous actu-
ation. Indeed, from Figure 3b, it is possible to notice
how the robot tends to reach a steady-state condition
if the actuation set does not change.
As for the throws, we assumed that the object
is released instantaneously at 0.105s since we ob-
served that around this instant, the manipulator pass
towards its initial resting position as represented in
Figure 3b. Moreover, the effect of the run-up phase
on the overall movement is visible. Even if the
end-effector steady-state response for the two phases
is the same in terms of displacement along the z-
axis, the transient responses are different; in fact,
during the forward stage, the manipulator has a
higher peak response compared to the previous pe-
riod. A collection of 6
6
= 46656 trajectories has
been generated by varying each torque value between
[0.5, 0.3, 0.1, −0.1, −0.3, −0.5]. For each of these
trajectories, the two actuation sets, the landing posi-
tion of the object and, for graphical reasons, also the
last position occupied by the end-effector are saved.
In particular, in Figure 3c, it is possible to compare the
difference between the workspace of the robot with
and without the ability to throw objects. In particu-
lar, the comparison of the farthest points in the two
cases shows that, thanks to the ability to throw an ob-
ject, the working space is increased of ∼ 260% with
a maximum distance ranging from 1.37m to 3.55 m.
3.2 Neural Network Comparison
The dataset, whose collection is shown in Section 3.1,
is used to derive the direct model of the task; with
an artificial neural network (ANN), we mapped the
input space with the resulting landing positions of the
thrown object as in (2).
x = f (τ
ru
,τ) (2)
Here, (τ
ru
,τ) are the actuation input of the run-up and
forward phase respectively and x represents the re-
sulting landing position. Different models of the same
Open-loop Control of a Soft Arm in Throwing Tasks
141

Table 1: Hyper-parameters - Elastica.
Hyper-parameters # Units Activation function Normalization
Changed
64 ReLU Z-score
128 Tanh Rescaling
Sigmoid
Fixed
Optimizer # Epochs Batch size
Adam 2500 64
Loss function Training set Learning rate
MSE 90% 0.001
0.0
1.0
2.0
3.0
4.0
5.0
6.0
7.0
64_ReLU_Z-score
64_Sigm_Z-score
64_Tanh_Z-score
128_ReLU_Z-score
128_Sigm_Z-score
128_Tanh_Z-score
64_ReLU_Rescaling
64_Sigm_Rescaling
64_Tanh_Rescaling
128_ReLU_Rescaling
128_Sigm_Rescaling
128_Tanh_Rescaling
Average distance [mm]
Neural Networks comparison
Figure 4: Best set of parameters selection.
robot were created and then compared to identify the
best one among them. The selection is made on the
test set by looking at the difference between the pre-
dicted landing position and the real one. Of course,
the best one is the model that achieves the lowest dis-
tance.
The soft arm model is represented by an artificial
neural network with one hidden layer. The hyper-
parameters that have been changed are the number of
units of the hidden layer, their activation function, and
the type of input normalisation. Default values have
been used for learning rate, partition between train-
ing, test set, and other parameters as reported in Table
1. To expedite the learning process, the early stopping
method has been considered. Furthermore, the input
layer of the network has twelve units while the output
one has three neurons which implement the linear ac-
tivation function. We decided to use for all the cases
a Z-score normalisation for the output values.
The results of the comparison are shown in Fig-
ure 4. Best performances are obtained with a Z-score
normalisation of the input and 64 units in the hidden
layer with a ReLU activation function.
3.3 Optimisation Problem
An optimization problem has been defined to find the
actuation set needed to throw an object in the desired
position. The idea is to gradually change the tentative
actuation set and compare the corresponding landing
position (generated by the neural network) with the
desired goal coordinates. To solve this problem, we
used the Basin-Hopping algorithm. This method, in-
spired by the Monte-Carlo minimisation and firstly
described in (Wales and Doye, 1997), is iterative, and
each cycle is composed of the following features:
1. Random perturbation of the input.
2. Local minimisation.
3. Based on the value function, the tentative input
can be marked as a reference or discarded.
In our case, as shown in Figure 5 which displays the
i-th iteration of the iterative algorithm, the input value
corresponds to the forward actuation set of the plat-
form τ
while the value function is represented by the
distance between the desired goal x
des
and the landing
point predicted by the neural network ˆx as described
by the equation (3).
f (τ) = ∥x
des
− ˆx(τ)∥ (3)
As anticipated in Section 2, the precision of this
method is highly dependent on the relationship be-
tween the actuation input used in the two phases of
the movement of the robotic arm. To increase the con-
troller performance, we decided to let the optimisa-
tion algorithm deal with just one of the two actuation
sets, in particular the one responsible for the forward
movement, while we derive the other since their rela-
tionship is known.
3.4 Results
With the proposed methodology, 1502 throws have
been completed. The goals are randomly chosen in-
side the working space shown in Figure 3c. In Figure
6 it is possible to appreciate the manipulator perform-
ing a throw towards one of the desired targets.
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
142

Table 2: Errors in different throws.
Category
Num.
Throws [-]
Maximum
error
Average
error
[mm] [%] [mm] [%]
A 260 1.36 0.11 0.49 0.04
B 741 5.97 0.47 0.81 0.06
C 501 10.47 0.83 1.25 0.10
Figure 5: Minimisation problem to find the best actuation set: Basin-Hopping algorithm.
As represented in Figure 7, we classified the
throws in three categories based on the compari-
son between the distance of the goal from the base
of the robot and the characteristic dimension of the
workspace that is equal to d = 1.256 m, according to
the criteria (4).
category A : if dist < d/2,
category B : if d/2 < dist < d,
category C : otherwise
(4)
The results obtained are summarised in Table 2 where
are reported the number of trials for every category
and the distance from the desired goal. In particular,
the percentage values are obtained with respect to the
characteristic dimension of the workspace.
The error is due to the neural network predic-
tion inaccuracies and the optimisation algorithm that
might not find the global optimum but a value close
to it. However, even with these sources of uncer-
tainties, the maximum error registered is equal to
∼ 10.5 mm. Considering that the arm length is 1 m
and the workspace maximum dimension is 3.55m (the
square diagonal), we can state that the error is negli-
gible.
4 CONCLUSIONS
This paper showed how an open-loop controller could
execute the throwing task for a soft manipulator. Even
if Elastica provides a soft robot model, we decided to
present a model-free approach to generalise the pro-
posed methodology that might be applied to any soft
manipulator since it does not require its model.
However, even if the error, in this case, is minimal
and related to the distance from the fixed end of the
robot, there is still the problem of waiting for the op-
timisation process to obtain the actuation set to throw
an object in the desired target. For this reason, further
work in the future will be considering other strategies
to perform the same task, such as a neural network
or reinforcement learning. Then, testing this method
on a real platform will be necessary. In this case,
several challenges have to be faced. More specifi-
cally, there could be a problem related to the trajec-
tories generation; while on this simulator finding the
relationship between the two phases in which we di-
vided the movement was relatively straightforward,
on a real platform we expect it to be more complex
because it will be related on the actuation systems of
the robot (fluidic, tendon-driven, etc.) and how they
are placed inside it.
Open-loop Control of a Soft Arm in Throwing Tasks
143
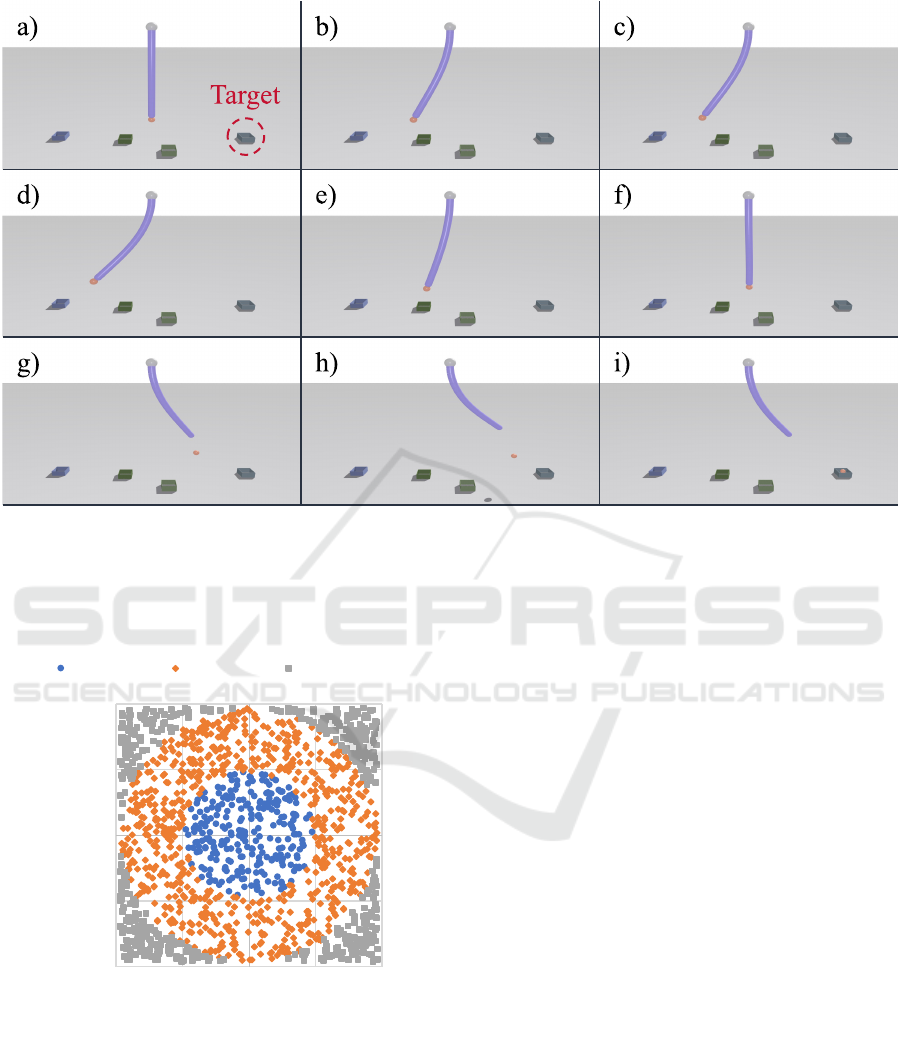
Figure 6: Soft robot manipulator while it is performing a throw toward the circled target in different time instants. The target,
here represented as a box without the lid, is 1.26 m distant from the projection of the fixed-end of the arm on the ground.
Run-up phase from a) to d), the remaining frames present the forward stage in which the object, here represented as a sphere,
is launched. In the frame f) the sphere is released and it starts following the projectile motion till it reaches the target in the
frame i). Videos are available at the following link.
-1.3
-0.65
0
0.65
1.3
-1.3 -0.65 0 0.65 1.3
y [m]
x [m]
Category A Category B Category C
Figure 7: Desired targets divided in different categories.
In addition, the proposed method relies on a rich
dataset that allowed to reach a significant accuracy in
the throwing tasks. In real application involving soft
robots, collecting such a consistent amount of data
could not be feasible leading to a decrease of perfor-
mances in terms of accuracy.
ACKNOWLEDGEMENTS
The authors would like to thank Andrea Centurelli
for the help provided during the development of
the proposed methodology and his comments on the
manuscript. The authors would like also to thank
Carlo Alessi for the support in the rendering of videos
available here.
This work was partially supported by the Euro-
pean Union’s Horizon 2020 FET-Open program under
grant agreement no. 863212 (PROBOSCIS project).
REFERENCES
Alqumsan, A. A., Khoo, S., and Norton, M. (2019). Robust
control of continuum robots using Cosserat rod theory.
Mechanism and Machine Theory, 131:48–61.
Centurelli, A., Arleo, L., Rizzo, A., Tolu, S., Laschi, C., and
Falotico, E. (2022). Closed-loop dynamic control of a
soft manipulator using deep reinforcement learning.
IEEE Robotics and Automation Letters, 7(2):4741–
4748.
Centurelli, A., Rizzo, A., Tolu, S., and Falotico, E. (2021).
Open-loop model-free dynamic control of a soft ma-
nipulator for tracking tasks. In 2021 20th Inter-
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
144

national Conference on Advanced Robotics (ICAR),
pages 128–133.
Chin, K., Hellebrekers, T., and Majidi, C. (2020). Machine
Learning for Soft Robotic Sensing and Control. Ad-
vanced Intelligent Systems, 2(6):1900171.
Cianchetti, M., Laschi, C., Menciassi, A., and Dario, P.
(2018). Biomedical applications of soft robotics. Na-
ture Reviews Materials, 3(6):143–153. Number: 6
Publisher: Nature Publishing Group.
Della Santina, C., Katzschmann, R. K., Biechi, A., and Rus,
D. (2018). Dynamic control of soft robots interact-
ing with the environment. In 2018 IEEE International
Conference on Soft Robotics (RoboSoft), pages 46–53.
Gazzola, M., Dudte, L. H., McCormick, A. G., and Ma-
hadevan, L. (2018). Forward and inverse problems in
the mechanics of soft filaments. Royal Society Open
Science, 5(6).
George Thuruthel, T., Ansari, Y., Falotico, E., and Laschi,
C. (2018). Control Strategies for Soft Robotic Ma-
nipulators: A Survey. Soft Robotics, 5(2):149–163.
Publisher: Mary Ann Liebert, Inc., publishers.
George Thuruthel, T., Falotico, E., Manti, M., Pratesi,
A., Cianchetti, M., and Laschi, C. (2017). Learning
closed loop kinematic controllers for continuum ma-
nipulators in unstructured environments. Soft robotics,
4(3):285–296.
Giorelli, M., Renda, F., Ferri, G., and Laschi, C. (2013). A
feed-forward neural network learning the inverse ki-
netics of a soft cable-driven manipulator moving in
three-dimensional space. In 2013 IEEE/RSJ Interna-
tional Conference on Intelligent Robots and Systems,
pages 5033–5039. ISSN: 2153-0866.
Kim, D., Kim, S.-H., Kim, T., Kang, B. B., Lee, M., Park,
W., Ku, S., Kim, D., Kwon, J., Lee, H., Bae, J., Park,
Y.-L., Cho, K.-J., and Jo, S. (2021). Review of ma-
chine learning methods in soft robotics. PLOS ONE,
16(2):e0246102. Publisher: Public Library of Sci-
ence.
Laschi, C., Mazzolai, B., and Cianchetti, M. (2016).
Soft robotics: Technologies and systems pushing
the boundaries of robot abilities. Science Robotics,
1(1):eaah3690. Publisher: American Association for
the Advancement of Science.
Mahl, T., Mayer, A. E., Hildebrandt, A., and Sawodny,
O. (2013). A variable curvature modeling approach
for kinematic control of continuum manipulators. In
2013 American Control Conference, pages 4945–
4950. ISSN: 2378-5861.
Naughton, N., Sun, J., Tekinalp, A., Parthasarathy, T.,
Chowdhary, G., and Gazzola, M. (2021). Elastica: A
Compliant Mechanics Environment for Soft Robotic
Control. IEEE Robotics and Automation Letters,
6(2):3389–3396. Conference Name: IEEE Robotics
and Automation Letters.
Piqu
´
e, F., Kalidindi, H. T., Fruzzetti, L., Laschi, C., Men-
ciassi, A., and Falotico, E. (2022). Controlling soft
robotic arms using continual learning. IEEE Robotics
and Automation Letters, 7(2):5469–5476.
Raptopoulos, F., Koskinopoulou, M., and Maniadakis, M.
(2020). Robotic Pick-and-Toss Facilitates Urban
Waste Sorting *. In 2020 IEEE 16th International
Conference on Automation Science and Engineering
(CASE), pages 1149–1154. ISSN: 2161-8089.
Rus, D. and Tolley, M. (2015). Design, fabrication and con-
trol of soft robots. Nature, 521:467–75.
Thuruthel, T. G., Falotico, E., Manti, M., and Laschi, C.
(2018). Stable Open Loop Control of Soft Robotic
Manipulators. IEEE Robotics and Automation Letters,
3(2):1292–1298. Conference Name: IEEE Robotics
and Automation Letters.
Thuruthel, T. G., Falotico, E., Renda, F., Flash, T.,
and Laschi, C. (2019). Emergence of behavior
through morphology: a case study on an octopus in-
spired manipulator. Bioinspiration & biomimetics,
14(3):034001.
Vannucci, L., Cauli, N., Falotico, E., Bernardino, A., and
Laschi, C. (2014). Adaptive visual pursuit involving
eye-head coordination and prediction of the target mo-
tion. In 2014 IEEE-RAS International Conference on
Humanoid Robots, pages 541–546.
Vannucci, L., Falotico, E., Di Lecce, N., Dario, P., and
Laschi, C. (2015). Integrating feedback and predic-
tive control in a bio-inspired model of visual pursuit
implemented on a humanoid robot. Lecture Notes in
Computer Science (including subseries Lecture Notes
in Artificial Intelligence and Lecture Notes in Bioin-
formatics), 9222:256–267.
Wales, D. J. and Doye, J. P. K. (1997). Global Opti-
mization by Basin-Hopping and the Lowest Energy
Structures of Lennard-Jones Clusters Containing up
to 110 Atoms. The Journal of Physical Chemistry A,
101(28):5111–5116. Publisher: American Chemical
Society.
Zeng, A., Song, S., Lee, J., Rodriguez, A., and Funkhouser,
T. (2020). TossingBot: Learning to Throw Arbitrary
Objects with Residual Physics. arXiv:1903.11239 [cs,
stat]. arXiv: 1903.11239.
Zhang, X., Chan, F. K., Parthasarathy, T., and Gazzola, M.
(2019). Modeling and simulation of complex dynamic
musculoskeletal architectures. Nature Communica-
tions, 10(1):undefined–undefined. Number: 1.
Zlatintsi, A., Dometios, A. C., Kardaris, N.,
Rodomagoulakis, I., Koutras, P., Papageorgiou,
X., Maragos, P., Tzafestas, C. S., Vartholomeos, P.,
Hauer, K., Werner, C., Annicchiarico, R., Lombardi,
M. G., Adriano, F., Asfour, T., Sabatini, A. M.,
Laschi, C., Cianchetti, M., G
¨
uler, A., Kokkinos, I.,
Klein, B., and L
´
opez, R. (2020). I-Support: A robotic
platform of an assistive bathing robot for the elderly
population. Robotics and Autonomous Systems,
126:103451.
Open-loop Control of a Soft Arm in Throwing Tasks
145
