
Learning Human-like Driving Policies from Real Interactive Driving
Scenes
Yann Koeberle
1,2
, Stefano Sabatini
2
, Dzmitry Tsishkou
2
and Christophe Sabourin
1
1
Univ. Paris Est Creteil, LISSI, F-77567 Lieusaint, France
2
IoV team, Paris Research Center, Huawei Technologies, France
Keywords:
Driving Simulation, Learning from Demonstrations, Adversarial Imitation Learning.
Abstract:
Traffic simulation has gained a lot of interest for autonomous driving companies for qualitative safety evalu-
ation of self driving vehicles. In order to improve self driving systems from synthetic simulated experiences,
traffic agents need to adapt to various situations while behaving as a human driver would do. However, sim-
ulating realistic traffic agents is still challenging because human driving style cannot easily be encoded in
a driving policy. Adversarial Imitation learning (AIL) already proved that realistic driving policies could
be learnt from demonstration but mainly on highways (NGSIM Dataset). Nevertheless, traffic interactions
are very restricted on straight lanes and practical use cases of traffic simulation requires driving agents that
can handle more various road topologies like roundabouts, complex intersections or merging. In this work,
we analyse how to learn realistic driving policies on real and highly interactive driving scenes of Interaction
Dataset based on AIL algorithms. We introduce a new driving policy architecture built upon the Lanelet2 map
format which combines a path planner and an action space in curvilinear coordinates to reduce exploration
complexity during learning. We leverage benefits of reward engineering and variational information bottle-
neck to propose an algorithm that outperforms all AIL baselines. We show that our learning agent is not only
able to imitate humane like drivers but can also adapts safely to situations unseen during training.
1 INTRODUCTION
For real world deployment, self driving systems re-
quire quantitative safety guarantees in presence of real
human drivers. Traffic simulation appears as a cru-
cial tool to continuously provide statistics of driv-
ing performances on arbitrary number of locations
and scenarios (Scheel et al., 2022) without endan-
gering human drivers. Simulation enables to expose
the Self Driving Vehicle (SDV) to various interactive
situations with controlled scenario modifications so
that critical failures can be identified. However the
reality gap between simulated and real driving be-
haviours can result in positive improvements in simu-
lation whereas dramatic issues could still occur in real
settings.
Animating each traffic agent during simulation re-
quires a decision process called driving policy which
can be designed in several different ways. Heuristic
based simulated agents are controlled with explicit
rules and can easily perform maneuvers as chang-
ing lane or car following but generated trajectories
are statistically different from trajectories generated
by humans (Treiber et al., 2000). Learning based
methods offer more flexibility to adjust driving be-
haviours in various situations (Suo et al., 2021; Scheel
et al., 2022). Reinforcement Learning enables to learn
through interactions with a simulator where the learn-
ing agent is penalized for catastrophic failures. The
main limitation of this approach comes from the fact
that the true reward representative of human driv-
ing style is unknown and expensive to design be-
cause it depends on various human preferences (Knox
et al., 2021). In contrast, supervised methods en-
ables to directly leverage real demonstrations and thus
can capture more naturalistic driving behaviors. The
most simple supervised learning method is Behavior
Cloning which maximizes the likelihood of expert ac-
tions on a training set. This approach has big lim-
itations in long term simulations because it suffers
from errors compounding and poor generalization ca-
pabilities (Codevilla et al., 2018). Alternatively, Ad-
versarial Imitation Learning (AIL) enables to exploit
real data through simulation interactions and delib-
erately exposes the policy to situations out of expert
experiences. AIL provides a guidance through a data-
Koeberle, Y., Sabatini, S., Tsishkou, D. and Sabourin, C.
Learning Human-like Driving Policies from Real Interactive Driving Scenes.
DOI: 10.5220/0011268400003271
In Proceedings of the 19th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2022), pages 419-426
ISBN: 978-989-758-585-2; ISSN: 2184-2809
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
419

driven reward that the learning agent is expected to
maximise during training which significantly reduces
catastrophic failures and helps the agent to get closer
to the expert trajectory. Several works (Ho and Er-
mon, 2016; Kuefler et al., 2017) already proved that
realistic driving policies can be learnt with AIL on
highways scenarios but interactions on straight lanes
are not representative of the driving task complexity
that encompasses challenges of various road topolo-
gies. Some complex intersections, roundabouts or
merging with numerous traffic agents reveals partic-
ularly difficult to handle because it induces complex
interplay between agents and slight trajectory offsets
could lead to crashes. Another difficulty encountered
by AIL algorithms is the ability to explore efficiently
in the long term in order to find a correct human-like
behaviors. The driving scene does not allow arbitrary
displacements and exploring naively the plane with
incremental shifts could quickly lead the agent to ab-
surd situations like going off road.
In this work, we investigate to which extent AIL
algorithms can be used for learning human-like driv-
ing policies able to adapt to new situations for long
horizon simulation. Our main contributions are:
• An analysis of imitation performances of driv-
ing policies trained with Adversarial Imitation
learning algorithms on highly interactive driving
scenes extracted from Interaction Dataset.
• An action space for parsimonious exploration
based on curvilinear coordinates with respect to a
reference path generated by a planner that exploit
the lanelet2 map format.
• An AIL algorithm that combines the benefits from
variationnal information bottleneck and reward
engineering.
We start to review main approaches for learning real-
istic driving policies in Section 2. Subsequently, Sec-
tion 3 explains how we learn a driving policy from
demonstration and describes the neural networks ar-
chitectures. Finally, we detail experiments settings
and report our results in Section 4.
2 RELATED WORKS
We review main traffic simulation approaches in Sec-
tion 2.1 before studying more in-depth how driving
polices can be learnt from demonstrations in Section
2.2.
2.1 Traffic Simulation
Traffic simulation has the potential to accelerate the
development of Self Driving Vehicle (SDV) (Cao
et al., 2020).The main challenge consists in guaran-
teeing that interacting with simulated traffic agents
could provide valuable experiences. Heuristic based
traffic simulator (Lopez et al., 2018) enables to gen-
erate traffic patterns with very few crashes but usu-
ally largely differ from real human traffic. Rule based
driving policies like IDM (Treiber et al., 2000) de-
signed for longitudinal control on highways or Mo-
bil (Kesting et al., 2007) designed for lane changes
cannot handle arbitrary road topologies where various
trajectory profiles are plausible like complex intersec-
tions. Learning based methods offer more flexibility
to adapt the driving policy to various scenes because
they can leverage human demonstrations.
Reinforcement learning offers the possibility to
design custom driving behaviours based on hand
crafted rewards so that the driving agent can adapt to
various situation based on explicit feedbacks like in-
centive to slow down at intersections, penalty in case
of over-speeding, etc. Several works (Chen et al.,
2021; Sharma and Sharma, 2021) show that RL driv-
ing policies are able to avoid safety critical failures in
urban scenarios but the main limitation comes from
the fact that the hand crafted reward does not consti-
tute the true driving performance but acts as a proxy
(Knox et al., 2021). Consequently a policy that has
high expected return is not guaranteed to behave as
a human would do which may lead to unrealistic
traffic patterns. In order to drive as a human, data
based methods leverage the huge amount of real driv-
ing demonstrations available to learn trajectories that
match human preferences. Simnet (Bergamini et al.,
2021) or TrafficSim (Suo et al., 2021) builds upon
prediction models to learn a centralized policy to ani-
mate each agent in the driving scene, but a centralized
policy can not easily scale to large scenarios because
it has to handle exponential number of interactions in
the number of agents for long simulation horizons. In
contrast, the RAIL algorithm (Bhattacharyya et al.,
2019) formulates traffic simulation as a multi agent
imitation problem and shows that realistic traffic pat-
terns can be learnt but it also assumes that all driving
agents are controlled by the same policy, driven by
the same reward neglecting the diversity of real road
users. Even if complementary approaches based on
multi agent reinforcement enables to learn multiple
policies with a centralized critic it is still very chal-
lenging to maintain training stability and convergence
guarantees (Lyu et al., 2021).
Consequently we consider traffic simulation as a
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
420

decentralized problem which consists in learning sin-
gle agent driving policies behaving close to human
drivers for long simulation horizons.
2.2 Learning to Drive from
Demonstration
In order to learn a realistic driving policy from human
demonstrations it is possible to formulate the driv-
ing task as a supervised problem called Behavioural
Cloning (BC) with the objective of matching actions
generated by the learning policy and the ones selected
by the expert (Codevilla et al., 2018). This technique
suffers from compounding errors during test time be-
cause BC is trained offline in open loop with i.i.d sam-
ples whereas the closed loop evaluation of the policy
induces a distributional shift due to sub optimal past
decisions.
To compensate deviations in closed loop, it is pos-
sible to complete the training dataset by querying
an interactive expert but online supervision is highly
constraining because it either requires a human in the
loop or a specific expert system (Ross et al., 2011).
An alternative is to resort to uncertainty-based reg-
ularization with ensemble of expert policies to re-
duce deviations from expert trajectories distribution
(Brantley et al., 2019). While this technique encour-
ages the learner to stay close to the expert trajecto-
ries, it cannot provide explicit guidance out of distri-
bution and remains computationally expensive to es-
timate accurately.
Adversarial Imitation Learning (AIL) offers more
flexibility to guide the policy and several works al-
ready showed that generative adversarial imitation
learning is able to learn realistic driving policies on
highways scenario despite collisions still happens (Ho
and Ermon, 2016; Kuefler et al., 2017). More impor-
tantly, standard AIL algorithms suffer from training
instabilities due to the asymmetric competition be-
tween discriminator and the generator. The discrim-
inator quickly tends to get too accurate which leads
to uninformative gradients for the policy which strug-
gles to match the expert driving strategy. To balance
the performance between the generator and the dis-
criminator, VAIL(Peng et al., 2018) enforces a con-
straint on the mutual information between the input
observation and the discriminator’s internal represen-
tation which prevents the accuracy from getting too
high. Even if this method enables to maintain infor-
mative guidance for the policy, the discriminator can-
not understand the causal structure of the driving task
which may lead to crashes once the policy is too far
from training distribution (De Haan et al., 2019).
To help the discriminator to avoid catastrophic
failures, domain knowledge could be used to feed the
discriminator with high level semantic signals like
off-road driving or collision indicators (Wang et al.,
2021). However the value assigned to the signal is
subjective and case sensitive which can deter the dis-
criminator to exploit relevant features in the state ac-
tion pair originally provided as input. To limit side ef-
fects on the discriminator, one can just add a penalty
to the discriminator reward when the policy goes in
undesired situations (Bhattacharyya et al., 2019). We
build upon those recent advances in AIL to learn a re-
alistic driving policy that can drive on new scenarios
with better safety.
3 LEARNING A REALISTIC
DRIVING POLICY
We formulate the driving task in Section 3.1 before
detailing how to learn realistic driving policies in Sec-
tion 3.2.
3.1 Problem Setting
We aim to learn realistic driving policies for ani-
mating traffic agents in simulation. Traffic simula-
tion consists in generating driving episodes from pre-
defined driving scenarios. A driving scenario S =
(M ,F ,ρ
0
,H, G) is composed of a simulation hori-
zon H, a bounded map of a road-network M and a
traffic flow F that spawns traffic agents at specific
time on the map according to an initial state distribu-
tion ρ
0
and a set of destinations G. We consider de-
centralized traffic simulation where each agent is ani-
mated by its own driving policy assigned by the traffic
flow. As real driving episodes are likely to include di-
verse policies, learning them simultaneously can turn
highly unstable. Consequently, we propose to learn
a single agent driving policy per episode called actor
policy while other agents in the scene called workers
are controlled by fixed driving policies. In order to
learn a single agent driving policy, we formulate the
task as Partially Obsersable Markov Decision Process
(POMDP): (S,O,A,T , R ). We condition the policy
π on a goal g provided at initialization by the traffic
flow to specify the driving task. At each decision step,
the policy gets an ego centric observation o of the
scene and take an action a to reach its goal. The ob-
servation is provided by an observer model O : S 7→ O
that operates on the driving scene states S. The driv-
ing scene state s which encompasses the actor state
as well as traffic workers states evolves according to
the transition dynamic T which take into account the
actor action and implicitly traffic workers decisions.
Learning Human-like Driving Policies from Real Interactive Driving Scenes
421

The reward process R is composed of two compo-
nents based on domain knowledge and human demon-
strations as detailed in Section 3.2.1.
3.2 Learning from Real Driving Data
We aim to learn a single agent driving policy π
θ
from
real demonstrations parametrized by a neural net-
work. We build upon adversarial imitation learning
and train jointly a policy and a discriminator so that
the policy generates expert like trajectories while the
discriminator is trained to distinguish the policy and
expert trajectory samples. Similarly to GAIL (Ho and
Ermon, 2016), we aim to solve the following prob-
lem:
min
π
θ
max
D
ϕ
E
(s,a)∼ρ
π
e
[log(D
ϕ
(s,a))]+
E
(s,a)∼ρ
π
θ
[log(1 − D
ϕ
(s,a))] − λH(π
θ
)
(1)
where H(π
θ
) denotes the policy causal entropy and
ρ
π
e
,ρ
π
θ
the marginal observation action distributions
induced by expert and policy respectively. In order
to solve this bi-level optimization problem (Liu et al.,
2021), we alternate between optimizing the discrim-
inator and optimizing the policy. The training pro-
cedure, depicted in Figure 1, is decomposed in three
main steps repeated until the maximum number of
training iterations is reached. The first step consists in
collecting in parallel, multiple driving episodes with
the current policy π
θ
and gathering them in the policy
buffer B
π
. Subsequently, we train the discriminator
on recent policy samples and expert demonstrations
as described in Section 3.2.2. The third steps con-
sists in updating the policy based on Proximal Pol-
icy Optimization (PPO) (Schulman et al., 2017) on a
training batch extracted from B
π
as detailed in Section
3.2.1. Note that the simulation horizon is progres-
sively increased during training along with our pol-
icy improvements. In the two following sections, we
explain how additionally we augment the usual AIL
training procedure summarized above to leverage do-
main knowledge (Section 3.2.1) and to regularize the
discriminator (Section 3.2.2).
3.2.1 Updating the Policy
The policy is trained with a reward signal r that is de-
composed in two terms a synthetic reward r
S
based
on domain knowledge and data driven term r
D
ϕ
com-
puted with the discriminator D
ϕ
as detailed in Section
3.2.2.
r = r
S
+ r
D
ϕ
(2)
The synthetic reward is itself composed of two terms:
one that penalizes collisions when they occur r
col
and
Concatenate
Compute generalized
Advantage estimator with
OnlineBuffer
OfflineBuffer
sample
transitions
Discriminator update
Assign driving scenarios
Update the rewards on
the policy buffer
episod
trajectory
update horizon
curriculum
Parrallel
simulations
update reference
demonstrations
PPO policy upate
Value upate
store
H
Figure 1: Driving policy training procedure based on adver-
sarial imitation learning.
one that favors forward displacement r
ds
:
r
s
= r
col
+ αr
ds
(3)
While the synthetic reward enables to avoid crashes
and motionless behaviour, the data driven is expected
to drive the policy close to humane trajectories. Since
PPO algorithm is used to update the policy, we lever-
age the Generalized Advantage Estimator to modu-
late the bias-variance trade off of the policy gradi-
ent. For each policy sample (s
t
,a
t
,r
t
) and its as-
sociate future trajectory τ
t
= [(s
t
,a
t
),...,(s
H−t
,a
H−t
)
where r
t
= r
S
(o
t
,a
t
) + r
D
ϕ
(o
t
,a
t
), we estimate the
GAE
ˆ
A
GAE
t
(s
t
,a
t
) as detailed in (Schulman et al.,
2015). Subsequently, PPO objective max
θ
J
PPO
(θ)
can be optimized with a clipping mechanism that tries
to avoid abrupt changes of the policy parameters lim-
ited by the threshold ε
π
.
J
PPO
(θ) = E
(a
t
,o
t
)∼π
θ
old
[min(L
π
(θ),L
π
clip
(θ))]
L
π
(θ) = µ
t
(θ)
ˆ
A
GAE
t
(o
t
,a
t
)
L
π
clip
(θ) = clip(µ
t
(θ),1 − ε
π
,1 + ε
π
)
ˆ
A
GAE
t
(o
t
,a
t
)
3.2.2 Updating the Discriminator
In the original GAIL algorithm, the discriminator
tends to get too accurate too quickly during training
which limits the progresses of the policy. Indeed,
as the classification loss is easier to optimize com-
pared to PPO loss that has high variance, the dis-
criminator output progressively gets close to zero for
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
422
logits
1:Lane corridor
2:reference route
3:neighbors histories
5:ego configuration
6:ego history
action embedding
272 x128
256 x128 x 64 x1256 x128 x 64
32x2
32x8x2
Policy Head
Policy
core
Value
head
: action
cat
16
sigmoid
observation
Decoder
128x256x64x1
128
128
Embedding Z
Encoder
embeding
lanelet
corridor
5 closest neighbors
configurations
last seconds of ego
trajectory history
destination
reference route
reference path
4:neighbors configurations
Observation
network
backbone
Discriminator
head
Observation embedding
Observation embedding
F6F5F3F2F1
112 x256
F4
F6
F5F3F2F1
112 x256
F4
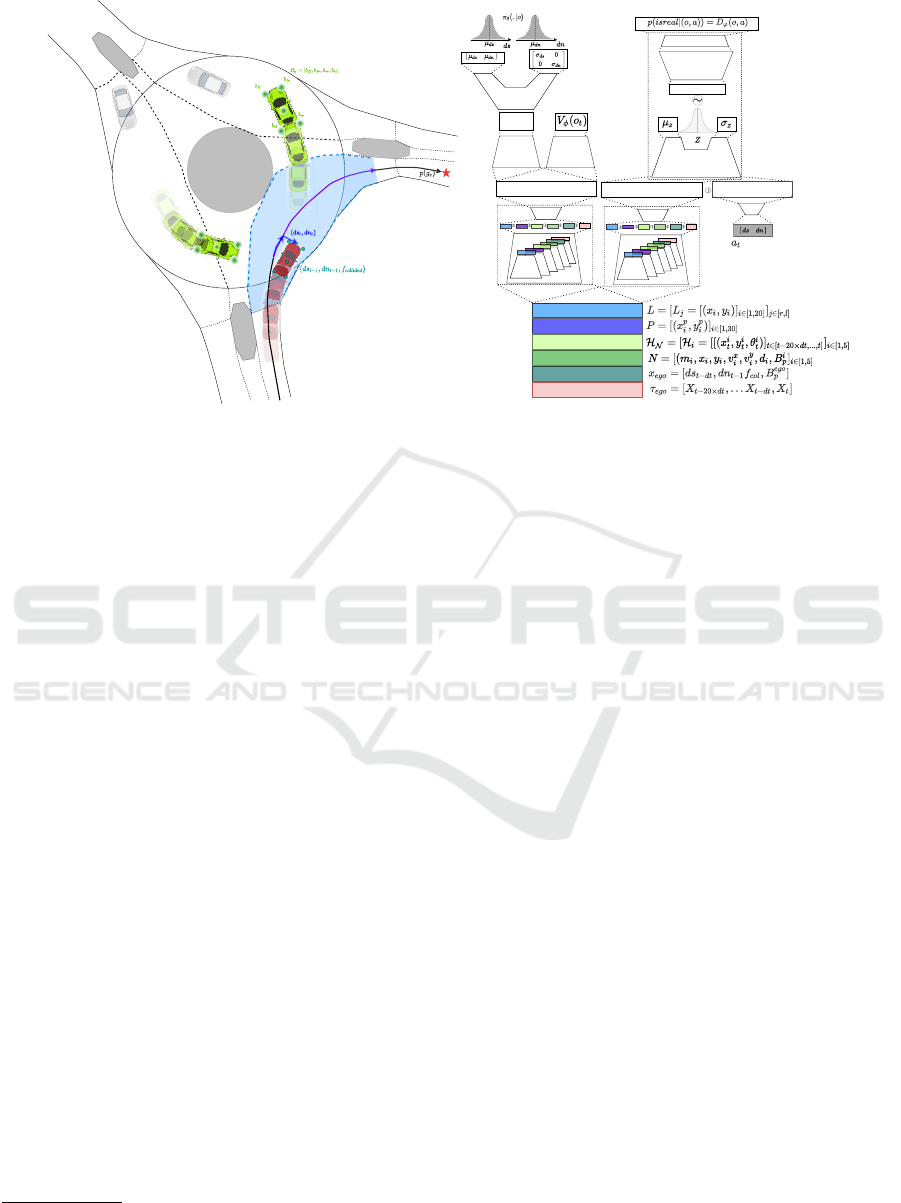
Figure 2: On the left side, illustration of the components of the observation provided to the policy as well as the action
generated by the policy and on the right side, architecture of the discriminator-actor-critic neural network.
policy samples. Consequently, the data driven re-
ward r
D
ϕ
= log(D
ϕ
(o,a)+ ε)−log(1−D
ϕ
(o,a)+ ε),
bounded with ε = 10
−8
to avoid exploding gradients,
saturates at a negative value instead of guiding the
policy. In order to balance the performance of the pol-
icy and the discriminator, we complement the original
problem 3.2 by constraining the information flow in
the discriminator by means of an information bottle-
neck. We enforce a constraint on the mutual infor-
mation I((O,A), Z) between the input of the discrim-
inator
1
and its internal representation Z to modulate
the discriminator’s accuracy. Consequently the dis-
criminator D
ϕ
is composed of two parts: an encoder
E
ϕ
that maps an observation action pair (o,a) to a
stochastic encoding z ∼ E(z|(o,a)) and a decoder D
ϕ
that classifies samples drawn from the encoder dis-
tribution as human-like or not. The encoder outputs
the mean µ
z
(φ) and the standard deviation σ
z
(φ) of
a multi variate Gaussian distribution N (µ
z
(φ),σ
z
(φ))
that enables to define the constrain on the information
flow. The algorithm called VAIL optimizes the stan-
dard GAIL objective while maintaining the mutual
information constrain by introducing a Lagrangian
multiplier β updated with dual gradient ascent (Peng
et al., 2018).
min
ϕ
max
β
J
Disc
(ϕ) + βM(ϕ) (4)
The discriminator objectiveJ
Disc
(ϕ) is optimized with
mini batch gradient descent for K epochs on policy
1
The discriminator input is an Observation Action pair,
hence the mutual information is written I((O,A),Z).
and expert buffers.
J
Disc
(ϕ) = E
(o,a)∼B
e
[E
z∼E
ϕ
(z|(o,a))
[log(D
ϕ
(z)]]+
E
(o,a)∼B
π
[E
z∼E
ϕ
(z|(o,a))
[log(1 − D
ϕ
(z)]] (5)
As the mutual information I((O,A), Z) cannot be
easily computed due to the difficulty to estimate
the marginal distribution p(z), we approximate p(z)
with a multivariate normal r(z) = N (0, I). Conse-
quently we obtain an upper bound denoted M(ϕ) on
I((O, A),Z) which we use as a regularizer.
M(ϕ) = E
(o,a)∼
˜
π
[KL[E
ϕ
[z|(o,a)]||r(z)]] − I
c
(6)
where I
c
= 0.5 denotes a threshold value. We update
the Lagrangian multiplier β with dual gradient ascent
in order to maintain the constrain on the mutual infor-
mation as detailed in (Peng et al., 2018).
Once the discriminator is trained, the data driven
reward is computed with the discriminator output
D
ϕ
(o,a) that represents the probability that (o,a) was
generated from an expert. In order to reduce the
reward bias induced by purely negative or positive
rewards, we use the reward formula introduced in
(Kostrikov et al., 2018):
r
D
ϕ
(o,a) = log(D
ϕ
(o,a)) − log(1 − D
ϕ
(o,a)) (7)
4 DRIVING POLICY
We detail in Section 4.1 how the driving policy ob-
serves and takes action before describing our neural
network architecture in Section 4.2.
Learning Human-like Driving Policies from Real Interactive Driving Scenes
423

Table 1: Comparison of imitation and safety metrics of driving policies evaluated on different scenes: roundabout(R), inter-
section(I), merging(M).
metrics Merging Roundabout Intersection
scenarios ADE-5(m) ADE-15(m) CR(%) ADE-5(m) ADE-15(m) CR(%) ADE-5(m) ADE-15(m) CR(%)
BC 8.18 14.26 75 6.29 14.16 79 4.71 11.50 46.5
GAIL 4.20 6.67 30 3.20 5.98 41 3.95 7.22 28
SGAIL 3.78 7.5 10 3.23 5.13 37 3.96 7.26 26
SVAIL 3.37 5.34 10 2.75 5.04 31 3.59 6.49 25
4.1 Observation and Action Space
The driving policy π(a|o, p(g)) is both conditioned on
an ego-centric observation of the driving scene and on
a reference path p(g) that leads to its destination. The
reference path p(g) is computed by a top level path
planner independently from the scene context lever-
aging the lanelet2 map format of the driving scene.
In order to move as much as possible along p(g) we
define the action space based on curvilinear coordi-
nates (s,n) with respect to p(g) as depicted in Figure
2. We enforced the policy to output longitudinal and
lateral (ds,dn) shifts at each decision step which en-
ables to explore parsimoniously plausible trajectories
and to stop simulation when actor gets too far from
the route. In contrast, controlling directly the forward
acceleration and the turn rate would not guide the dis-
placement of the agent toward the goal during explo-
ration but let it easily deviate from p(g).
In order to infer appropriate moves, we provide
an observation composed of several contextual com-
ponents of the driving scene in a vectorized format.
We provide information about the map like the lane
corridor and the reference route. The Lane corridor
L = [L
r
= [(x
i
,y
i
)]
i∈[1,20]
,L
l
= [(x
i
,y
i
)]
i∈[1,20]
] is com-
posed of the right and left borders coordinates relative
to the actor of the drivable area
2
in a 10 meter radius
around the reference path. The reference route is a
piece of the reference path p(g) 10 meters in front of
the actor. We also provide information about the traf-
fic context with five nearest neighbors configurations
N = [(m
i
,x
i
,y
i
,v
x
i
,v
y
i
,d
i
,B
i
p
]
i∈[1,5]
and their trajectory
histories for the last 2 seconds relative to current actor
position H
N
= [H
i
= [(x
i
t
,y
i
t
,θ
i
t
]
t∈[t−20×dt,...,t]
. Each
neighbor configuration contains a mask m to indicate
if the i-th neighbor exists, its position relative to the
actor x
i
,y
i
, its speed vector v
x
i
,v
y
i
, relative distances d
i
as well as its spatial extension with the four border
points coordinates on front, rear, left and right side
B
i
p
= [b
i
f l
,b
i
f r
,b
i
rr
,b
i
rl
]. Lastly, we add two compo-
nents to specify the actor current state x
ego
and the
coordinates of its trajectory for the last 2 seconds
τ
ego
= [X
t−20×dt
,...X
t−dt
,X
t
]. The actor configuration
2
The drivable area is extracted based on the sequence of
lanelets (Poggenhans et al., 2018) that constitutes the refer-
ence path p(g).
contains, its last action [ds
t−dt
,dn
t−dt
], a collision flag
f
col
, and its spatial extension in terms of border points
coordinates B
ego
p
= [b
ego
f l
,b
ego
f r
,b
ego
rr
,b
ego
rl
].
4.2 Neural Network Architecture
The driving policy π
θ
is implemented with a neural
network that parametrizes the next action [ds
t
,dn
t
]
with two independent gaussian distributions whose
mean and variance are both learned. The network
first embeds each observation components with spe-
cific sub networks built upon Fully Connected (FC)
layers and generates a set of observation features F =
[F
i
]
i∈[1,..,6]
depicted with colored rectangles in Figure
2. In order to handle the variable number of neighbors
in the scene, individual configuration and history are
embedded for each neighbor with two separate net-
works shared for all neighbors. The feature vectors
F
3
,F
4
that represent neighbors histories and neigh-
bors configurations are computed by summing indi-
vidual embeddings when the agent exists as indicated
by a mask. At the end of the Observation network
backbone, observation features are combined by con-
catenation and a FC layer computes the final obser-
vation embedding vector. The policy and value heads
composed of consecutive FC layers share the same
observation embedding vector but the value gradients
are not back-propagated through the backbone which
would perturb the policy for the next data collection.
Regarding the discriminator, it shares the same ar-
chitecture for computing the observation embedding
vector but has a separate network. The encoder and
decoder networks are built with consecutive (FC) lay-
ers. Note that z is sampled using the reparametrization
trick : z = µ
z
+ ε.σ
z
with ε ∼ N (0,I) during discrim-
inator updates whereas the mean µ
z
is directly used to
feed the decoder D
ϕ
when the reward is computed for
PPO updates.
5 EXPERIMENTS
5.1 Simulation Dataset and Metrics
In order to learn a driving policy from real demon-
strations through interactions, we build a driving sim-
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
424

ulator on top of driving scenes extracted from the
Interaction dataset (Zhan et al., 2019). The dynam-
ics of traffic workers is approximated by replaying
their original trajectories during simulations because
we ignore how to animate them realistically on new
situations. We focus on three different maps with
high number of interactions: the roundabout called
DR DEU Roundabout OF, the intersection called
DR USA Intersection EP0 and the merging called
DR DEU Merging MT . Since we aim to imitate the
driving style of road users on specific spots we train
our driving policy separately on three training sets
for each map. For each of the training set, we ex-
tracted 200 driving scenarios for each of the follow-
ing temporal horizons: 2.5, 5, 7.5, 10, 12.5 and 15
seconds which gives a total of 1200 training scenarios
per area
3
. The three associate validation sets are each
composed of 128 new real scenarios of 15 seconds in
order to focus on long term simulation performances.
In order to evaluate the imitation of the actor driv-
ing policy we compute the Average Distance Error
with respect to the human demonstration (ADE) af-
ter 5 and 15 second of simulation. We also report the
percentage of episodes that contains a collision (CR)
to estimate if the driving behaviour is safe.
5.2 Results
We analyse the performances of different AIL algo-
rithms for learning realistic driving policy based on
real driving demonstration of the validation set. We
trained several baselines that we list below:
• BC: implements standard behavioural cloning
that only exploit expert demonstrations (Codevilla
et al., 2018).
• GAIL: implements a standard implementation of
GAIL algorithm without the variational informa-
tion bottleneck (Ho and Ermon, 2016).
• SGAIL: implements GAIL algorithm whose re-
ward is augmented by the addition of a synthetic
component r
S
= r
col
+ 0.1r
ds
as detailed in Sec-
tion 3 inspired from (Bhattacharyya et al., 2019).
The penalty equals r
col
= −2 when the collision
occurs and the bonus for longitudinal displace-
ment r
ds
= max(1.0,
ds
ds
max
) depends on the max-
imal speed allowed ds
max
= 50km/hour.
• SVGAIL: implements the VAIL algorithm de-
tailed in Section 3.2 and adds the synthetic reward
the same way as SGAIL.
3
This enables to extract as much demonstrations as pos-
sible even if some agents do not stay a long time on the
recorded scene
We trained all those baselines with the neural network
architecture detailed in Section 4.2 on the demonstra-
tions of each training set separately. We compare im-
itation and safety metrics on the validation set and we
report the metrics in Table 1. We first compare GAIL
performances with Behaviour Cloning that does not
learn through simulation interactions. We observe
that BC suffers from compounding errors with high
ADEs and tends to collide on a majority of scenarios.
GAIL outperforms BC performances for long term
imitation and gets significantly safer than BC with a
much lower rate of episode with collisions. As GAIL
still often collides it could be beneficial to penalize
it more intensively with a synthetic reward for this
specific event. We observe that SGAIL successively
improves safety performance of GAIL while keep-
ing similar imitation metrics. The results of SVAIL
shows that imitation performances can further been
improved compared to SGAIL by modulating the ac-
curacy of the discriminator. We conclude that origi-
nal GAIL can significantly benefit from modifications
proposed in SGAIL and VAIL.
Comparing the ADE-15 variations of SVAIL be-
tween the three maps, we note that its is harder to
imitate human driving style on scenarios built on the
intersection. This can be explained by the fact that
the interaction map contains more lanes and junctions
than the roundabout and the merging with numerous
agent spawning locations encoded in the initial state
distribution ρ
O
4
. Consequently the expert trajectory
distribution on the intersection has a bigger support
which is more difficult to learn both for the discrimi-
nator and the policy.
6 CONCLUSIONS
In this work, we analyse imitation and safety perfor-
mances of AIL algorithms on real and highly inter-
active scenarios extracted from Interaction Dataset.
We propose an efficient action space based on a ref-
erence path and curvilinear coordinates which en-
ables to explore plausible human trajectories parsi-
moniously. We propose an advanced version of the
VAIL algorithm that exploits a synthetic reward based
on domain knowledge and the lanelet2 map format for
observation extraction to better guide the policy dur-
ing training. We show that our algorithm outperforms
all the baselines in imitation and safety on driving
scenarios unseen during training. For future works,
we plan to better control the trade off between human
4
The reader can refer to Interaction Dataset description
(Zhan et al., 2019) to observe the difference.
Learning Human-like Driving Policies from Real Interactive Driving Scenes
425

imitation and safe driving which still limits practical
applications.
REFERENCES
Bergamini, L., Ye, Y., Scheel, O., Chen, L., Hu, C.,
Del Pero, L., Osi
´
nski, B., Grimmett, H., and On-
druska, P. (2021). Simnet: Learning reactive self-
driving simulations from real-world observations. In
2021 IEEE International Conference on Robotics and
Automation (ICRA), pages 5119–5125. IEEE.
Bhattacharyya, R. P., Phillips, D. J., Liu, C., Gupta, J. K.,
Driggs-Campbell, K., and Kochenderfer, M. J. (2019).
Simulating emergent properties of human driving be-
havior using multi-agent reward augmented imita-
tion learning. In 2019 International Conference on
Robotics and Automation (ICRA), pages 789–795.
IEEE.
Brantley, K., Sun, W., and Henaff, M. (2019).
Disagreement-regularized imitation learning. In
International Conference on Learning Representa-
tions.
Cao, Z., Bıyık, E., Wang, W. Z., Raventos, A., Gaidon, A.,
Rosman, G., and Sadigh, D. (2020). Reinforcement
learning based control of imitative policies for near-
accident driving. arXiv preprint arXiv:2007.00178.
Chen, J., Li, S. E., and Tomizuka, M. (2021). Interpretable
end-to-end urban autonomous driving with latent deep
reinforcement learning. IEEE Transactions on Intelli-
gent Transportation Systems.
Codevilla, F., M
¨
uller, M., L
´
opez, A., Koltun, V., and Doso-
vitskiy, A. (2018). End-to-end driving via conditional
imitation learning. In 2018 IEEE international confer-
ence on robotics and automation (ICRA), pages 4693–
4700. IEEE.
De Haan, P., Jayaraman, D., and Levine, S. (2019). Causal
confusion in imitation learning. Advances in Neural
Information Processing Systems, 32.
Ho, J. and Ermon, S. (2016). Generative adversarial imi-
tation learning. Advances in neural information pro-
cessing systems, 29.
Kesting, A., Treiber, M., and Helbing, D. (2007). General
lane-changing model mobil for car-following models.
Transportation Research Record, 1999(1):86–94.
Knox, W. B., Allievi, A., Banzhaf, H., Schmitt, F., and
Stone, P. (2021). Reward (mis) design for autonomous
driving. arXiv preprint arXiv:2104.13906.
Kostrikov, I., Agrawal, K. K., Dwibedi, D., Levine,
S., and Tompson, J. (2018). Discriminator-actor-
critic: Addressing sample inefficiency and reward
bias in adversarial imitation learning. arXiv preprint
arXiv:1809.02925.
Kuefler, A., Morton, J., Wheeler, T., and Kochenderfer, M.
(2017). Imitating driver behavior with generative ad-
versarial networks. In 2017 IEEE Intelligent Vehicles
Symposium (IV), pages 204–211. IEEE.
Liu, R., Gao, J., Zhang, J., Meng, D., and Lin, Z. (2021).
Investigating bi-level optimization for learning and vi-
sion from a unified perspective: A survey and beyond.
IEEE Transactions on Pattern Analysis and Machine
Intelligence.
Lopez, P. A., Behrisch, M., Bieker-Walz, L., Erdmann, J.,
Fl
¨
otter
¨
od, Y.-P., Hilbrich, R., L
¨
ucken, L., Rummel,
J., Wagner, P., and Wießner, E. (2018). Microscopic
traffic simulation using sumo. In 2018 21st inter-
national conference on intelligent transportation sys-
tems (ITSC), pages 2575–2582. IEEE.
Lyu, X., Xiao, Y., Daley, B., and Amato, C. (2021).
Contrasting centralized and decentralized critics in
multi-agent reinforcement learning. arXiv preprint
arXiv:2102.04402.
Peng, X. B., Kanazawa, A., Toyer, S., Abbeel, P., and
Levine, S. (2018). Variational discriminator bottle-
neck: Improving imitation learning, inverse rl, and
gans by constraining information flow. arXiv preprint
arXiv:1810.00821.
Poggenhans, F., Pauls, J.-H., Janosovits, J., Orf, S., Nau-
mann, M., Kuhnt, F., and Mayr, M. (2018). Lanelet2:
A high-definition map framework for the future of
automated driving. In 2018 21st International Con-
ference on Intelligent Transportation Systems (ITSC),
pages 1672–1679. IEEE.
Ross, S., Gordon, G., and Bagnell, D. (2011). A reduc-
tion of imitation learning and structured prediction
to no-regret online learning. In Proceedings of the
fourteenth international conference on artificial intel-
ligence and statistics, pages 627–635. JMLR Work-
shop and Conference Proceedings.
Scheel, O., Bergamini, L., Wolczyk, M., Osi
´
nski, B., and
Ondruska, P. (2022). Urban driver: Learning to drive
from real-world demonstrations using policy gradi-
ents. In Conference on Robot Learning, pages 718–
728. PMLR.
Schulman, J., Moritz, P., Levine, S., Jordan, M., and
Abbeel, P. (2015). High-dimensional continuous con-
trol using generalized advantage estimation. arXiv
preprint arXiv:1506.02438.
Schulman, J., Wolski, F., Dhariwal, P., Radford, A., and
Klimov, O. (2017). Proximal policy optimization al-
gorithms. arXiv preprint arXiv:1707.06347.
Sharma, A. and Sharma, S. (2021). Wad: A deep rein-
forcement learning agent for urban autonomous driv-
ing. arXiv preprint arXiv:2108.12134.
Suo, S., Regalado, S., Casas, S., and Urtasun, R. (2021).
Trafficsim: Learning to simulate realistic multi-agent
behaviors. In Proceedings of the IEEE/CVF Confer-
ence on Computer Vision and Pattern Recognition,
pages 10400–10409.
Treiber, M., Hennecke, A., and Helbing, D. (2000). Con-
gested traffic states in empirical observations and mi-
croscopic simulations. Physical review E, 62(2):1805.
Wang, P., Liu, D., Chen, J., Li, H., and Chan, C.-Y. (2021).
Decision making for autonomous driving via aug-
mented adversarial inverse reinforcement learning. In
2021 IEEE International Conference on Robotics and
Automation (ICRA), pages 1036–1042. IEEE.
Zhan, W., Sun, L., Wang, D., Shi, H., Clausse, A., Nau-
mann, M., Kummerle, J., Konigshof, H., Stiller, C.,
de La Fortelle, A., et al. (2019). Interaction dataset:
An international, adversarial and cooperative motion
dataset in interactive driving scenarios with semantic
maps. arXiv preprint arXiv:1910.03088.
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
426
