
Towards Automatic Block Size Tuning for Image Processing Algorithms
on CUDA
Imene Guerfi
a
, Lobna Kriaa
b
and Leila Azouz Saidane
CRISTAL Laboratory, RAMSIS Pole, National School for Computer Sciences (ENSI), University of Manouba, Tunisia
Keywords:
GPU Computing, Parallel Programming, Program Optimization, Auto-tuning, and Face Detection.
Abstract:
With the growing amount of data, computational power has became highly required in all fields. To satisfy
these requirements, the use of GPUs seems to be the appropriate solution. But one of their major setbacks
is their varying architectures making writing efficient parallel code very challenging, due to the necessity to
master the GPU’s low-level design. CUDA offers more flexibility for the programmer to exploit the GPU’s
power with ease. However, tuning the launch parameters of its kernels such as block size remains a daunting
task. This parameter requires a deep understanding of the architecture and the execution model to be well-
tuned. Particularly, in the Viola-Jones algorithm, the block size is an important factor that improves the
execution time, but this optimization aspect is not well explored.
This paper aims to offer the first steps toward automatically tuning the block size for any input without having
a deep knowledge of the hardware architecture, which ensures the automatic portability of the performance
over different GPUs architectures. The main idea is to define techniques on how to get the optimum block
size to achieve the best performance. We pointed out the impact of using static block size for all input sizes
on the overall performance. In light of the findings, we presented two dynamic approaches to select the best
block size suitable to the input size. The first one is based on an empirical search; this approach provides
the optimal performance; however, it is tough for the programmer, and its deployment is time-consuming. In
order to overcome this issue, we proposed a second approach, which is a model that automatically selects a
block size. Experimental results show that this model can improve the execution time by up to 2.5x over the
static approach.
1 INTRODUCTION
Recent years have seen a significant explosion in
Graphics Processing Units (GPUs) use in several aca-
demic and industrial fields (Tran et al., 2017). Mod-
ern GPUs have considerable computational power
due to their many cores, providing new opportunities
to accelerate data-intensive applications like image
processing, virtual reality, and deep learning. How-
ever, such applications are (1) challenging to be par-
allelized and (2) demand much effort from program-
mers to be optimized due to the GPU’s complex mem-
ory system and massive thread-level parallelism.
NVIDIA developed Compute Unified Device Ar-
chitecture (CUDA) which is a platform for mas-
sive data parallelism. The programmer should set
the launch configuration parameters before launch-
ing parallel kernels (functions) onto the GPU. Once
a
https://orcid.org/0000-0002-2886-1713
b
https://orcid.org/0000-0002-2112-7807
established with a static number, the configuration
parameters can’t be changed till the end of the exe-
cution. More precisely, the programmers select the
number of threads (block size) and the number of
blocks (grid size). Thus, an efficient parallel imple-
mentation needs to be well-tuned, which often com-
plicates the task for programmers. These parame-
ters need to be tuned repeatedly, and sometimes parts
of the code must be rewritten to reach considerable
speedup compared to the original code. Moreover,
any change of the used GPU architecture implicates
that all the tuning work must be redone.
The block size to choose was a concern encoun-
tered in our previous work. To clarify, we have pro-
posed an efficient GPGPU-based implementation of
the face detection algorithm (Guerfi et al., 2020).
In this previous work, we parallelize and optimize
the Viola-Jones face detection algorithm using the
CUDA programming model. The Viola-Jones algo-
rithm combines four kernels: 1) Nearest neighbor to
Guerfi, I., Kriaa, L. and Saidane, L.
Towards Automatic Block Size Tuning for Image Processing Algorithms on CUDA.
DOI: 10.5220/0011314800003266
In Proceedings of the 17th International Conference on Software Technologies (ICSOFT 2022), pages 591-601
ISBN: 978-989-758-588-3; ISSN: 2184-2833
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
591

resize the image, 2) Integral image, 3) Computing the
image coordinates for each feature, and 4) Scaling and
detecting faces. The main idea of the algorithm is to
resize the image until it is equal to or smaller than the
detection windows 25x25, and search faces in each re-
sized image. At each iteration, the four kernels will be
executed by the GPU with different input sizes. The
problem remains in choosing the block size at each
iteration; if the programmer determines the suitable
block size for each kernel’s initial image, this number
will probably not be the best for the other resized im-
ages. Moreover, the block size that can be adequate
for all image sizes doesn’t exist.
In order to solve this problem, this paper presents
two different approaches, an empirical search for the
block size and a model-based selection strategy. Be-
fore that, the impact of selecting a static block for
all the input images was studied. A considerable de-
crease in performance was noticed between different
block sizes, reaching 90.5%. After that, empirical re-
search was performed to dynamically select the opti-
mal block size for each input size. The founded val-
ues have been saved to a file and called at the execu-
tion time. However, empirical research is hard for the
programmer. And its deployment is time-consuming
because there is a vast range of possible values for
the block size, and any change in the input image or
the used GPU implies that all the work must be re-
done. Furthermore, a tuning model for the block size
was proposed. This model relies on understanding
the CUDA execution model and considering the in-
put image size, which automatically selects the block
size that provides nearly the optimal execution time
without requiring any interaction with the program-
mer. We show that auto-tuning the block size can im-
prove performance by up to 2.5x over the static con-
figuration.
The rest of this paper is organized as follows:
The following section gives an overview of the re-
lated work. Section 3 presents a brief overview of
the NVIDIA GPUs, the CUDA execution model, and
the Viola-Jones algorithm. In the next section, we de-
scribe all the used methods and the processes of tun-
ing the block size. Section 5 elaborates on experi-
mental results and discussion, and finally. Section 6
concludes the paper.
2 RELATED WORKS
Many works proposed a parallelized and optimized
version of the Viola-Jones algorithm. These works
claim to recorded interesting results; unfortunately,
none of them explained how they tune the launch con-
figuration. The nature of the Viola-Jones algorithm
makes adjusting the block size indispensable. Since
all kernels are executed multiple times with differ-
ent input sizes for the same image, the tuning method
should choose the block size that gives the best exe-
cution time without affecting the performance.
In the context of tuning CUDA performance,
many works exist on tuning different GPU parameters
for other applications. We are interested in the works
that tuned the block size. There are three types of tun-
ing: empirical, model-based, and predictive model-
based tuning (Alur et al., 2018).
- Empirical search-based approach: Several recent
studies have tackled the tuning problem through em-
pirical search-based approaches. The idea is to do an
exhaustive search for all candidate values in order to
find the optimal block size. Among the significant
number of works, we cite some relevant ones. Tor-
res et al. (Torres et al., 2012) presented an analy-
sis of the performance variation caused by selecting
the block size for the Fermi architecture. They stud-
ied the impact of block size on global memory ac-
cess performance and introduced a general approach
for block size choice by using some performance cri-
teria such as memory access pattern and total work-
load per thread. After that, they developed a suite
of micro-benchmarks (uBench) (Torres et al., 2013)
that explore the impact on the performance of the
thread-block geometry choice. In (Liu and Andelfin-
ger, 2017), Liu et al. presented a GPU-based parallel
discrete-event simulator based on the Time Warp syn-
chronization algorithm. They study the effectiveness
of parameter tuning, and they perform measurements
and adaptation at run-time. Brandt et al. (Brandt
et al., 2019) use a performance prediction model at the
compile time to select the thread block configurations
for the CUDA kernel. They tested the selection tool
using the Poly-bench/GPU benchmark kernels. They
reported good results; however, they precise that the
time for the selection process ranges between 30 sec-
onds and 2 minutes (Mohajerani, 2021); this delay is
not affordable for Viola-Jones algorithms in each iter-
ation and each kernel. Empirical tuning helps to find
the optimal launch configuration. However, applying
it takes a lot of time and effort from the programmers
or the compilers.
- Model-based approaches: Using the model-
based tuning, the programmer creates model-based
rules to select the optimal launch configuration. We
cite some relevant work that considers the model-
based approach as a solution to the tuning problem.
Mukunoki et al. (Mukunoki et al., 2016) proposed
a method to adjust the thread-block size for several
memory-bound BLAS kernels. The proposed model
ICSOFT 2022 - 17th International Conference on Software Technologies
592

can calculate the block size by extracting the amount
of register and shared memory needed for the ker-
nel. These calculations are done at execution time
before executing the kernel. Tran et al. (Tran et al.,
2017) presented a tuning model based on the warp-
occupancy, which can calculate a set of options for
block size. However, the final choice and its deploy-
ment in the code weren’t presented. Hu et al. (Hu
et al., 2020) proposed an automatic selection strat-
egy of block size based on the warp-occupancy, where
the model selects the block size with the highest oc-
cupancy at compile time. This model considers the
kernel’s amount of register and shared memory. The
model-based approach was not tested on the Viola-
Jones algorithm, where the choice of the block size
should not add much overhead to execution time.
- Predictive model-based approaches: For the pre-
dictive model-based tuning, in these approaches, the
tuning model is trained via machine learning algo-
rithms. Connors et al. (Connors and Qasem, 2017)
presented a supervised machine learning approach
that automatically selects profitable block size. The
proposed model predicts if a change in block size
will improve the performance. Cui et al. (Cui and
Feng, 2021) designed an approach based on statistical
analysis and iterative machine-learning; this approach
automatically determines nearly optimal settings for
the GPU block size. In Viola-Jones case, the tuning
should not add too much overhead.
3 BACKGROUND
This section provides an overview of the NVIDIA
GPUs and the CUDA execution model. Then we
present the Viola-Jones Face Detection Algorithm.
3.1 A Brief Overview of NVIDIA GPUs
and CUDA Execution Model
GPU is a multicore system that consists of a set of
Streaming Multiprocessors (SMs). Each SM contains
several cores over which hundreds of threads can be
executed simultaneously, and there are multiple SMs
in a GPU. NVIDIA uses the term Compute Capa-
bility (CC) to describe hardware versions of GPUs,
which represents general specifications and available
features in these GPUs (NVIDIA, 2021b).
CUDA is a parallel computing platform and pro-
gramming model developed by NVIDIA. CUDA em-
ploys a Single Instruction Multiple Thread (SIMT) ar-
chitecture to leverage the parallelism provided by the
multiple cores, where threads are executed in a group
of 32 called warps.
CUDA code is formulated in kernels, which can
be called from the CPU. For each kernel, the pro-
grammer should specify the number of threads and
blocks that will execute it. Threads are grouped into
blocks, and blocks are grouped into grids. Blocks
and grids have a multidimensional aspect. When a
kernel is launched, its blocks are distributed among
available SMs based on the availability of resources.
Once a block is scheduled to an SM, it remains there
till the end of its execution; however, the SM can
execute multiple blocks simultaneously. After that,
the threads will be divided into warps that the SM
scheduler will distribute for execution on existing re-
sources. The resources (registers and shared memory)
used by threads limit the number of warps that can
physically be executed simultaneously. Shared mem-
ory is partitioned among blocks resident on the SM,
and registers are partitioned among threads (Cheng
et al., 2014)(NVIDIA, 2021b). Deep knowledge of
the hardware architecture and the execution model is
indispensable for configuring kernel execution to get
the best performance.
3.2 Viola-Jones Face Detection
Algorithm
The viola-Jones face detection algorithm is an algo-
rithm created by Paul Viola and Michael Jones in
2001 (Viola and Jones, 2001). The detection process
begins with resizing the input image with a scale fac-
tor of 1.2 until the image is equal to or smaller than
the detection windows 25x25; the nearest neighbor al-
gorithm will be used. After that, the resized image
will be transformed into an integral image, used to
reduce the massive calculation caused by identifying
Haar features. Then the image positions for each Haar
feature will be computed, which are the relative coor-
dinates of Haar features in a 25x25 detection window
to prepare for shifting. After that, each moved de-
tection window will go through the cascade classifier
stages; at each stage, if the integral sum is less than
the threshold, this window is rejected. Otherwise, the
window passes to the next stage. It will be accepted
as a face if a window passes all stages.
There will be four kernels for the GPU paral-
lelized version of this algorithm. The first kernel re-
sizes the image and calculates the first part of the inte-
gral image, where each thread will calculate one row,
so there will be as many threads as the height of the
image. The second kernel calculates the second part
of the integral image, where each thread will calculate
one column, so the total number of threads will equal
the image’s width. The third kernel for computing the
image coordinates for Haar features, each thread will
Towards Automatic Block Size Tuning for Image Processing Algorithms on CUDA
593

calculate one feature for this kernel, so there will be
2913 threads. And the fourth kernel for the cascade
classifier and detecting faces which has the most in-
tensive work, this kernel needs (height x width) – (24
x 24) threads. For more information about the par-
allelized algorithm, we refer to (Guerfi et al., 2020).
Since the basic idea of the algorithm is to resize the
image, each kernel will deal with multiple image sizes
with a different total number of threads, for that using
static block size will lead to a degradation of the per-
formance. Next, we will prove that static block size
is a wrong decision for the programmer and how can
using a dynamic block size improve the performance.
After that, we will present our model, which will cal-
culate the block size for any image without interaction
with the programmer.
4 TUNING BLOCK SIZE
The optimal block size differs according to the lim-
its imposed by the GPU architecture, such as the max
threads per SM, and software factors such as the used
register per thread and the input data size. This sec-
tion describes our methods to determine the optimal
block size. First, we will illustrate the impact of pass-
ing over the tuning step and choosing a static block
size for all image sizes. After that, we present how
making a dynamic block size selection according to
the input size could improve the performance. The
dynamic block size gives us the optimal performance;
however, it’s tough for the programmer and takes too
much time. For that, we present a model that automat-
ically selects the block size. The block sizes selected
by the model provide near-optimal performance.
4.1 Static Block Size
When writing the kernels of the Viola-Jones algo-
rithm, the block size should be specified; however,
that number could not suit all the input image sizes.
Moreover, due to the nature of the Viola-Jones algo-
rithm, for the same input, the image should be resized
multiple times. This section will show how choos-
ing one fixed block size over another could consider-
ably decrease performance. We will execute ten dif-
ferent image sizes with all possible block sizes. How-
ever, since the search space for the block size (B
size
)
is vast, we need to reduce it; we will use some ba-
sic knowledge of the CUDA programming model that
any beginner should know and some hardware limits
(NVIDIA, 2021a)(Cheng et al., 2014).
• The blocks may contain a maximum of 1024
threads per block (MaxT
B
), which is the maximum
block size. Regardless of the block’s dimensions,
their product should not exceed this limit (equation
1).
B
size
≤ MaxT
B
(1)
• Since the hardware allocates threads for a block in
units of 32, which is the warp size (W
size
), so it makes
sense to choose a block size multiple of 32 (equation
2).
B
size
= W
B
×W
size
(2)
where (W
B
) is the number of warps per block. This
condition maximizes the performance and avoids
wasting resources; simultaneously, it fixes a lower
boundary for the block size. From (equation 1) and
(equation 2), we found the limits of block size:
32 ≤ B
size
≤ 1024
Consequently, because the number of threads per
block should be multiple of 32 (equation 2), the
search space is restricted to:
B
size
∈ {32, 64, 96, 128, 160, 192, 224, 256, 288, 320,
352, 384, 416, 448, 480, 512, 544, 576, 608, 640, 672,
704, 736, 768, 800, 832, 864, 896, 928, 960, 992, 1024}
After decreasing the search space of the block size,
we claim that even the block size that gives the better
performance between these choices is not sufficient;
we will provide an example to explain the problem.
We suppose that the input image size is 1024 x 1024.
in the Integral image kernel (we will focus on the inte-
gral image; however, this example applies to all used
Kernels). The total number of threads needed for ex-
ecution will equal the image’s width (as explained in
the previous section). After an empirical search, we
assume that the programmer found that 128 is the best
block size. After launching the face detection algo-
rithm, it will resize the image 21 times. The total
number of executed threads for the integral image in
each iteration is {1024, 853, 711, 592, 493, 411, 342,
285, 238, 198 165, 137, 114, 95, 79, 66, 55, 46, 38,
32, 26} respectively. After some iterations, we can
see that 128 will be bigger than the total number of
elements, which means we invoke more threads than
needed. That’s only one problem with the static block
size because it’s sure that one fixed block size could
not fit all the input sizes. Next, we attempt to tune
the best block size for the ten used input sizes and all
resized images.
4.2 Empirical Block Size Tuning
(Dynamic Block Size)
Since it’s clear that tuning is indispensable, the obvi-
ous way to tune that comes to mind is an empirical
ICSOFT 2022 - 17th International Conference on Software Technologies
594

search to examine all the possible block sizes with all
the input sizes and pick the best for each input, which
is the idea of empirical tuning. For that, several steps
are needed and explained below.
The first step is to conduct a series of empirical
searches in the block size space introduced in the pre-
vious section. The program stores the performance
data and program input in a database during the in-
vestigation. This step aims to show the relationship
between the block size and the performance by per-
forming multiple sampling executions. In the second
step, we use collected data to select the best block
size; then, we save it to a new database. After that,
whenever we have to treat the exact image size, the
program will use the database to recognize the rela-
tion between input image size and the corresponding
suitable block sizes for all resized images. We call
this a dynamic block size since the block size changes
during the execution to adapt the input; figure 1 shows
the block size selection process using the dynamic
empirical approach. We assume that empirical tun-
ing provides the best overall performance because we
selected the block size by actual execution, consider-
ing the hardware architecture and the used resources.
However, this approach takes a lot of time and effort;
moreover, all the work must be redone if the GPU
changes or a new input image is used. Due to these
difficulties, we will next present our model that auto-
matically tunes the block size.
Figure 1: The block size selection process using the dy-
namic empirical approach for one image.
4.3 Model-based Block Size Tuning
This sub-section proposes a method for providing
near-optimal performance based on input size and
GPU architecture by automatically determining the
best block sizes. The model’s motivation is the need
for an automatic selection of the block size without
adding too much overhead. The model should se-
lect the block size offline and consider the input size
and GPU architecture. The CUDA best practice guide
indicates that keeping the multiprocessors on the de-
vice busy is the key to good performance (NVIDIA,
2021a); our idea is based on that. We select the block
size which makes the GPU work the maximum at all
levels. To build the model, we need to define three
types of occupancy that will be the key for the block
size selection.
4.3.1 Warp Occupancy
The warp occupancy represents the concurrence be-
tween the warps executed on SM; low occupancy re-
sults in performance degradation. On CUDA, the
number of threads, blocks, and warps performed per
SM is limited by the used resources and certain phys-
ical limits (the maximum number of resident threads,
blocks, and warps per SM). The SMs have to work
maximum so that it provides better performance.
When choosing a block size (B
size
), the number of
warps per block (W
B
) is calculated by (equation 3)
W
B
=
B
size
W
size
(3)
The block size limits the number of possible blocks
per SM (B
SM
); in addition, B
SM
is also bounded by
physical limits like the maximum number of resident
threads per SM (MaxT
SM
) and the maximum number
of resident block per SM (MaxB
SM
) (equation 4)
B
SM
=
(
f loor(
MaxT
SM
B
size
) ,if
MaxT
SM
B
size
≤ MaxB
SM
MaxB
SM
,otherwise
(4)
The function f loor(x) rounds x down to the first near-
est integer more minor than the argument passed (x).
Using equations (3) and (4), we can calculate the
maximum possible warps per SM (W
SM
) (equation 5)
W
SM
= W
B
× B
SM
(5)
Before calculating the warp occupancy, we need to
add a condition to the input data to ensure that the
model will never pick a block size bigger than the to-
tal number of elements to be executed (Nb
ele
). We
define the warp occupancy (O
w
) as (equation 6):
O
w
=
(
W
SM
MaxW
SM
,if Nb
ele
> B
size
0 ,otherwise
(6)
Where MaxW
SM
is the maximum number of resident
warps per SM. We note that the MaxT
SM
, MaxB
SM
,
and MaxW
SM
depend on the GPU architecture, where
each CC has its values.
There are multiple block sizes for some kernels
that can reach maximum O
w
. The warp occupancy
is a theoretical value that decides the upper limit for
occupancy imposed by the launch configuration and
the device’s capabilities; however, it illustrates only
Towards Automatic Block Size Tuning for Image Processing Algorithms on CUDA
595

the SM level concurrency and does not consider the
actual inputs. On the other side, the block size, the to-
tal number of blocks, and the total executed elements
affect the performance at the device level. We claim
that warp occupancy is not sufficient to build a ro-
bust model. To solve this problem, we strengthen our
model with block occupancy and SM occupancy to
answer two questions How many SMs work? And
how much does each one work?
4.3.2 Block Occupancy
This part of the model has the role of making sure that
all the SMs have enough work. We calculate the real
number of blocks (grid size G
size
), which consider the
input size. Gsize can be calculated using the block
size and the total number of elements using the for-
mula (equation 7):
G
size
= f loor(
Nb
ele
+ B
size
− 1
B
size
) (7)
We have calculated the number of possible blocks per
SM (B
SM
) in the previous sub-section. Now, since
we are at the device level, we know that the device
has multiple SMs. We can calculate the number of
possible blocks per device (B
device
) (equation 8):
B
device
= B
SM
× Nb
SM
(8)
Where Nb
SM
is the number of SMs in the device. The
GPU can indeed carry out hundreds of threads; how-
ever, there is a limit for parallelism. We can imagine
the GPU execution as a sequential series of parallel
execution, so we will calculate the number of itera-
tions needed to execute all the elements (Nb
i
) (equa-
tion 9):
Nb
i
= ceil(
G
size
B
SM
× MaxB
SM
) (9)
The function ceil(x) rounds x up to the first nearest in-
teger greater than the argument passed (x). We define
the block occupancy O
B
as (equation 10):
O
B
=
G
size
B
device
× Nb
i
(10)
4.3.3 SM Occupancy
When choosing the block size, we need to ensure that
the work is divided between SMs. As we explained
before, keeping the SMs busy is the key to perfor-
mance. So, we reinforce our model with SM occu-
pancy to ensure that the maximum number of SMs
are working at any moment of the execution. The
SM scheduler assigns blocks to SMs in a round-robin
fashion. Ideally, we suppose that the SMs will per-
form the iterations simultaneously, so we need to en-
sure that the last iteration will have enough work for
all SMs. Thus, we have to determine the number
of active SMs in the last iteration (Nb
SMlast
) by cal-
culating the number of blocks for the last iteration,
which will indicate if all the SMs will work at that
time (equation 11):
Nb
SMlast
=
G
size
− (B
device
× (Nb
i
− 1))
,if G
size
− (B
device
× (Nb
i
− 1)) < Nb
SM
Nb
SM
,otherwise
(11)
We define the SM occupancy OSM as (equation
12):
O
SM
=
Nb
SMlast
Nb
SM
+ (Nb
i
− 1)
Nb
i
(12)
The SM occupancy shows how much SMs are work-
ing during all iterations. More O
SM
means that more
SMs were working simultaneously.
4.3.4 The Model
Our model combines three different ways to enhance
performance. We choose the block size that affords
the maximum warp occupancy to have enough con-
currency between warps. At the same time, it ensures
that the maximum number of SMs are working and
each of them is working utmost. In order to be closer
to the real execution, our model considers the input
size and GPU architecture. We assume that the block
size that maximizes the three former occupancies is
the most likely optimal block size. Hence, the model
chooses the block size which maximizes the former
three occupancies most. We don’t want to add a lot
of overhead to the execution time of the Viola-Jones
algorithm. Since when we calculate the block sizes
of all the kernels for one image size, it will fit all im-
ages with the same size. Also, the same size will often
be executed multiple times, especially when we treat
video frames. We decided to devise the tuning algo-
rithm into 2 phases. First, we train all the ten image
sizes and save the values for all kernels and iterations
in a dataset named file.txt. Second, at the time of de-
tection, the already saved values will be loaded at the
beginning when we load the cascade classifier. In the
case of a new image size, we have to calculate its val-
ues only one time and save them to the dataset; Fig-
ure 2 shows the block size selection process using the
model approach.
We need to define the algorithm’s search space for
the first phase. We determined the search space in
section 4.1; however, that one was straightforward, so
we must refine it. As we have seen, there is a maxi-
mum limit on the resident threads and blocks per SM,
so to maximize the use of threads and blocks in the
ICSOFT 2022 - 17th International Conference on Software Technologies
596

Figure 2: The block size selection process using the model
approach.
SM, we define equation 13:
B
size
≥
MaxT
SM
MaxB
SM
(13)
Using a block size that doesn’t follow equation 13
limits the total number of threads that could be used
in the SM because the maximum block per SM will
inhibit it. There are guidelines for the grid and block
size provided by The CUDA C Best Practices Guide
(NVIDIA, 2021a), in which it is specified that the
use of many small blocks is better than the use of
one big block; for that, we will eliminate block sizes
that lead to the use of one block per grid. Since all
block threads should be executed on the same SM,
the block size is limited by the hardware capacity of
the SM. Available resources, such as registers and
shared memory, limits the number of resident threads,
blocks, and warps per SM. The use of a small block
size leads to reaching these limits before all resources
are fully utilized; for that, we will eliminate the block
sizes that lead to the use of maximum block per SM.
Using these guides and equation (13), we define the
new search space as:
B
size
∈ {32, 64, 96, 128, 160, 192, 224, 256, 288,
320, 352, 384, 416, 448, 480, 512}
The process to determine the block size is performed
on the host (CPU) side before launching the CUDA
kernel.
5 EXPERIMENTATION AND
DISCUSSION
5.1 Experimental Setup
The proposed tuning approaches were developed and
tested on Intel(R) Core (TM) i5-10300H 2.50 GHz
loaded with Windows 10 (64 bits) and NVIDIA
graphics processing unit GeForce GTX 1650Ti. The
development and testing have been done in Microsoft
Visual Studio 14.0.25431.01. The CUDA files are
compiled by the CUDA compiler of Release 11.1,
with the architecture support corresponding to com-
pute capability 7.5. Table 1 describes the specifica-
tions for this GPU and its physical limits.
Table 1: The device information for the used GPU.
Compute capability CC 7,5
Warp size W
size
32
The maximum number of threads per block Max
T B
1024
The maximum number of resident threads per SM MaxT
SM
1024
The maximum number of resident blocks per SM MaxB
SM
16
The maximum number of resident warps per SM MaxW
SM
32
The number of SMs SM 16
For the evaluation of our approaches, we use
frontal face images with 10 different sizes (100x100,
320x240, 480x240, 512x512, 640x480, 720x480,
600x800, 1280x720, 1024x1024, 1024x1280).
5.2 Results, Discussion, and Model
Evaluation
In this section, we present the performance results
with analyses. The best practice guide (NVIDIA,
2021a) indicates that the block’s multidimensional as-
pect allows easier mapping of multidimensional prob-
lems to CUDA and does not play a role in perfor-
mance. For the sake of simplicity, we use only one
dimension for blocks and grids. The multidimen-
sional aspect will be considered in the extended model
in future works. In order to evaluate the effects of
static block size, we conducted experiments where the
block size ranges from 64 to 1024 for all the kernels,
the grid size was generated using equation (7), and we
used ten different input sizes. To ensure accuracy, the
execution was done multiple times. Figure 3 shows
the overall execution time of each image size with
varying block sizes. The green and red lines repre-
sent the minimum and maximum time, respectively.
According to figure 3, it’s clear that there is am-
ple space between the representation of the minimum
and maximum in all sub-figures. We can deduce
that choosing the wrong block size can lead to a se-
vere performance decrease. The gap among execu-
tion times for different images varies between 59.6%
and 90.5%. We can see that there isn’t a rhythm
for the performance, so we can’t orientate the user
to choose a bigger or smaller block size for the ker-
nels of this algorithm. After that, we navigated the
different choices for block size, and we chose the one
that provided better performance for each kernel. This
time, our experiments are based on comparing static
and dynamic block sizes select approach. Figure 4
shows the static and dynamic approaches execution
time for each image size.
Towards Automatic Block Size Tuning for Image Processing Algorithms on CUDA
597

(a) (b) (c) (d)
(e) (f) (g) (h)
(i) (j)
Figure 3: The overall execution time of the ten image sizes with varying block sizes (static approach).
Figure 4: The execution time of the static and dynamic approaches for each image size.
Figure 4 shows that, in actual performance tests,
the dynamic approach outperforms the static one for
all the test images in varying degrees; these degrees
range from 1.65x to 2.52x. We claim that the dynamic
approach can provide the best performance because it
is based on real execution, and the chosen block size
is the one that has the best performance for each ker-
nel and image size separately. Although the dynamic
approach doesn’t need any deep understanding of the
GPU architecture and the programming model, it is
hard for a programmer, and its deployment requires a
lot of time. In addition, if the architecture changes, all
the tuning needs to be redone. From here comes the
need for an automatic way to tune block size. Next,
we apply our tuning model described above. Using
the device parameters, we calculate the three occu-
pancies as described in equations (6), (10), and (12).
This model automatically picks the block size that
provides near-optimal performance. Figure 5 shows
the performance obtained with block size determined
ICSOFT 2022 - 17th International Conference on Software Technologies
598
by our method in yellow and the one with the static
and dynamic approach in green and blue, respectively.
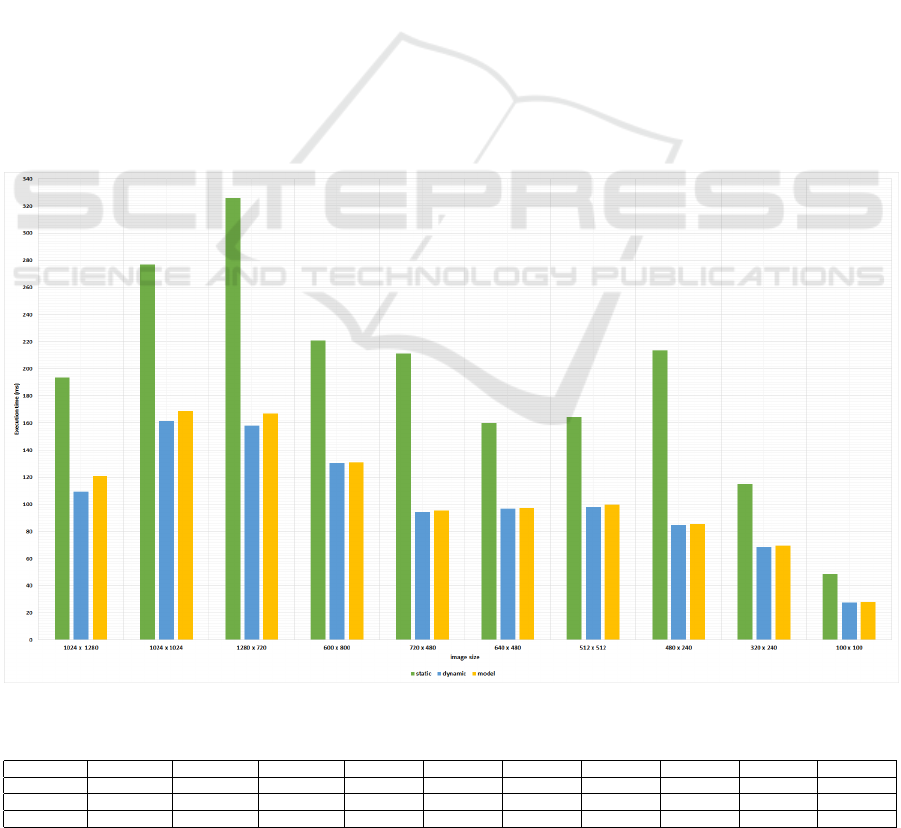
Figure 5 demonstrates how much the model out-
performs the static approach by a factor up to 2.5.
and gets nearly the same execution time as the dy-
namic one. The dynamic approach beats the model
with a difference that varies between 0.4 and 11.5 ms.
These results evaluate how precisely the model can
determine the optimal block size. We measured the
entire execution time of 10 different image sizes us-
ing the three above approaches. Table 2 summarizes
their execution time.
In order to evaluate the effects of our model, we
conducted experiments where we profiled all the ker-
nels to find their achieved occupancies and their ex-
ecution time. Figures 6, 7, 8, and 9 show the result
of this experiment for the image size 1024x1280. (a)
for the real execution time and (b) for the model oc-
cupancy.
From figures 6, 7, and 8, we can see that the
model occupancy matches in reverse with the execu-
tion time, proving our model’s efficiency. However,
this doesn’t happen precisely in figure 9. We believe
that memory access is simple for the first, second,
and third kernels and doesn’t need so many registers.
However, the fourth kernel executes more instructions
and consume more register.
Our model chooses the block size that maximizes
the occupancy, and from the figures 6, 7, 8 and 9, we
can see that the block size which has the highest oc-
cupancy is the one that has the lowest execution time.
These results further validate our model, and now we
will consider each figure separately. For the ”nearest
neighbor” kernel, the model chooses the block size 96
for the image size 1024x1280 because it has the best
occupancy, and in figure 6, this block size has the best
execution time. The same thing is for figure 7, which
presents the ”integral image” kernel, where the model
chooses 96 as the block size, and we can see that this
block size provides the best performance. For the ”Set
Image For Cascade Classifier” kernel, 128 is the block
size chosen from the model, and it is the one that pro-
vides the best performance, as we can see in figure8.
In figure 9, it’s clear that a match doesn’t exist be-
tween execution time and the model. We believe that
the reason is its nature and the fact that it has a lot of
instruction and uses so much register. This issue will
be the subject of our extended model in future works.
Besides that, this example shows that the model chose
the best block size in most cases. We’ll dig a little
Figure 5: The performance of the 3 approaches with different image sizes.
Table 2: Summary of the execution time for the three approaches for selecting block size.
Image size 1024x1280 1024x1024 1280 x 720 600 x 800 720 x 480 640 x 480 512 x 512 480 x 240 320 x 240 100 x 100
Static 193,50 276,71 325,89 220,76 211,08 159,74 164,59 213,53 114,73 48,61
Dynamic 109,13 161,54 158,08 130,40 94,49 96,85 97,88 84,69 68,54 27,49
The model 120,67 168,63 166,64 130,86 95,36 97,26 99,63 85,43 69,34 27,89
Towards Automatic Block Size Tuning for Image Processing Algorithms on CUDA
599

(a) (b)
Figure 6: The nearest neighbor kernel.
(a) (b)
Figure 7: The integral image kernel.
(a) (b)
Figure 8: Set Image for Cascade Classifier kernel.
(a) (b)
Figure 9: Scale Image Invoker kernel.
deeper in our future work by investigating the rela-
tionship between the three occupancies, the execution
time, and the used resources.
6 CONCLUSIONS
Performance is very important in image processing
applications running on GPUs, and it strongly de-
pends on GPU launch configuration settings. In this
paper, we addressed the issue of block size tuning
for the image processing algorithms. We consider
this study as the first step to facilitate parallel pro-
gramming by producing an analytical modeling tool
for tuning the algorithms and for the automatic porta-
bility of performance over different architectures. In
this paper, we considered the Viola-Jones algorithm.
Our study consists of three parts. First, we proved
the impact of using static block size on performance
degradation and that achieving the best performance
requires carefully tuning the block size. Second, we
tuned the block size empirically and made its selec-
tion dynamic based on the input size. This tuning
approach is very promising; however, it is hard and
takes a lot of time to be established. Third, we gen-
erate a model that automatically tunes the block size.
This model provides a near-optimal performance for
the Viola-Jones kernels in most cases. To evaluate our
work, we used ten different image sizes. The experi-
mental result shows that, for the first part, the use of
static block size and choosing the wrong one can de-
crease performance down to 90.5%. For the second
part, using a dynamic tuned block size for each in-
put size decreased the execution time by up to 2.52x
comparing to the static block size. Because of the
hardness of employing the empirical dynamic tuning,
we considered the model-based tuning approach that
provides nearly the same performance as the dynamic
one with a difference of up to 11.5ms; however, it has
the advantage of being easier because it’s automatic.
In our future works, we will improve the model
by considering other factors that affect performance,
like registers and shared memory. And we will fo-
cus on the automatic portability of our model regard-
less of the hardware platform used. In addition, as
part of our ongoing works, we continue to validate
and refine the model on additional kernels and algo-
rithms. We are convinced that, with further improve-
ments, our model will be able to tune any kernel on
any GPU architecture automatically. As another di-
rection of work, we will discover the impact of the
predictive model-based tuning on the image process-
ing algorithm’s performance.
REFERENCES
Alur, R., Devietti, J., and Singhania, N. (2018). Block-
size independence for gpu programs. In International
Static Analysis Symposium, pages 107–126. Springer.
Brandt, A., Mohajerani, D., Maza, M. M., Paudel, J., and
Wang, L. (2019). Klaraptor: A tool for dynamically
finding optimal kernel launch parameters targeting
cuda programs. ArXiv, Vol. CoRR abs/1911.02373.
ICSOFT 2022 - 17th International Conference on Software Technologies
600

Cheng, J., Grossman, M., and McKercher, T. (2014). Pro-
fessional CUDA c programming. John Wiley & Sons.
Connors, T. A. and Qasem, A. (2017). Automatically select-
ing profitable thread block sizes for accelerated ker-
nels. In The 19th International Conference on High
Performance Computing and Communications; the
15th International Conference on Smart City; the 3rd
International Conference on Data Science and Sys-
tems (HPCC/SmartCity/DSS), pages 442–449. IEEE.
Cui, X. and Feng, W.-c. (2021). Iterml: Iterative machine
learning for intelligent parameter pruning and tuning
in graphics processing units. Journal of Signal Pro-
cessing Systems, 93(4):391–403.
Guerfi, I., Kriaa, L., and Sa
¨
ıdane, L. A. (2020). An efficient
gpgpu based implementation of face detection algo-
rithm using skin color pre-treatment. In The 15th In-
ternational Conference on Software Technologies (IC-
SOFT 2020), pages 574–585.
Hu, W., Han, L., Han, P., and Shang, J. (2020). Auto-
matic thread block size selection strategy in gpu par-
allel code generation. In International Symposium on
Parallel Architectures, Algorithms and Programming,
pages 390–404. Springer.
Liu, X. and Andelfinger, P. (2017). Time warp on the gpu:
Design and assessment. In Proceedings of the 2017
ACM SIGSIM Conference on Principles of Advanced
Discrete Simulation, pages 109–120.
Mohajerani, D. (2021). Parallel arbitrary-precision integer
arithmetic. Electronic Thesis and Dissertation Repos-
itory. 7674. https://ir.lib.uwo.ca/etd/7674.
Mukunoki, D., Imamura, T., and Takahashi, D. (2016).
Automatic thread-block size adjustment for memory-
bound blas kernels on gpus. In 2016 IEEE 10th Inter-
national Symposium on Embedded Multicore/Many-
core Systems-on-Chip (MCSOC), pages 377–384.
IEEE.
NVIDIA, C., editor (2021a). CUDA C++ BEST PRAC-
TICES GUIDE, volume Version 11.5. https:
//docs.nvidia.com/cuda/cuda-c-best-practices-guide/
index.htm.
NVIDIA, C., editor (2021b). CUDA C++ PRO-
GRAMMING GUIDE, volume Version 11.5.
https://docs.nvidia.com/cuda/pdf/CUDA\ C\
Programming\ Guide.pdf.
Torres, Y., Gonzalez-Escribano, A., and Llanos, D. R.
(2012). Using fermi architecture knowledge to speed
up cuda and opencl programs. In 2012 IEEE 10th
International Symposium on Parallel and Distributed
Processing with Applications, pages 617–624. IEEE.
Torres, Y., Gonzalez-Escribano, A., and Llanos, D. R.
(2013). ubench: exposing the impact of cuda block
geometry in terms of performance. The Journal of Su-
percomputing, 65(3):1150–1163.
Tran, N.-P., Lee, M., and Choi, J. (2017). Parameter
based tuning model for optimizing performance on
gpu. Cluster Computing, 20(3):2133–2142.
Viola, P. and Jones, M. (2001). Rapid object detection us-
ing a boosted cascade of simple features. In Proceed-
ings of the 2001 IEEE computer society conference on
computer vision and pattern recognition. CVPR 2001,
volume 1, pages I–I. IEEE.
Towards Automatic Block Size Tuning for Image Processing Algorithms on CUDA
601
