
Motion Planning for Mobile Robots using the Human Tracking Velocity
Obstacles Method
Zolt
´
an Gyenes
1 a
, Ilshat Mamaev
2 b
, Dongxu Yang
2
, Emese Gincsain
´
e Sz
´
adeczky-Kardoss
1 c
and Bj
¨
orn Hein
2 d
1
Department of Control Engineering and Information Technology, Faculty of Electrical Engineering and Informatics,
Budapest University of Technology and Economics, M
˝
uegyetem rkp. 3., H-1111 Budapest, Hungary
2
Intelligent Process Automation and Robotics Lab, Karlsruhe Institute of Technology (KIT), Karlsruhe, Germany
Keywords:
Mobile Robot, Motion Planning, Autonomous System, Human Tracking.
Abstract:
Human-robot interaction is playing an increasingly important role in everyday life and we can expect an even
bigger explosion in the use of robots in the future. One such use is where a mobile robot needs to follow the
human. The main objective of this paper is to introduce a novel motion planning algorithm for mobile robots,
which can be used to enable the robot to follow a human while maintaining a given distance. The motion
planning algorithm has to take into account obstacles in the workspace of the robot at each sampling time and
to generate a collision-free motion for the agent.
1 INTRODUCTION
Mobile robots are becoming more prominent in our
daily lives. There are already commercially avail-
able street delivery robots (Valdez et al., 2021; Jung,
2020), wide range of applications for warehouse
robots (Ch’ng et al., 2020), and service robots in
healthcare industry (Reiser et al., 2009). Fueled by
advances in artificial intelligence, the developments
in autonomous mobile robotics with co-existence of
humans and robots, have opened new challenges in
motion planning and control. Collision avoidance and
person following are the most basic tasks in mobile
robotics, ensuring safety of the robotic application
and comfortable human robot interaction.
In this paper, we propose an approach to mobile
robot motion control for person-following with dy-
namic collision avoidance combining directive circle
and velocity obstacles methods.
The rest of the paper is structured in the following
way: Section 2 presents selected related work, con-
sidering the motion planning algorithms for mobile
robots. In Section 3, the novel motion planning al-
gorithm is introduced. After that, in Section 4, the
a
https://orcid.org/0000-0003-1803-7146
b
https://orcid.org/0000-0003-2546-7304
c
https://orcid.org/0000-0002-7789-6402
d
https://orcid.org/0000-0001-9569-5201
simulation results are presented. Later on, in Section
5, the paper will be summarized.
2 RELATED WORK
In this Section, human tracking and motion planning
algorithms for mobile robots will be presented.
2.1 Human Detection and Tracking
Object tracking is one of the classical tasks in com-
puter vision. Due to the recent advances in AI-based
object detection, tracking-by-detection has attracted
interest in this field. The Simple Online and Realtime
Tracking (SORT) was introduced by (Bewley et al.,
2016) in 2016 and extended with deep association
metric in 2017 (Wojke et al., 2017). The latter ap-
proach was tuned for pedestrian detection and outper-
formed other tracking algorithms (Xiang et al., 2015;
Yang and Jia, 2016). Another approach is based on
decomposition the person tracking process to several
parts, using threshold segmentation and morphologi-
cal operations for detection, Kalman filter algorithm
for tracking and Hungarian algorithm for the data as-
sociation algorithm (Qian et al., 2020). A tracking
framework called EagerMOT fuses all available ob-
ject observations originating from 2D and 3D detec-
484
Gyenes, Z., Mamaev, I., Yang, D., Szádeczky-Kardoss, E. and Hein, B.
Motion Planning for Mobile Robots using the Human Tracking Velocity Obstacles Method.
DOI: 10.5220/0011318200003271
In Proceedings of the 19th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2022), pages 484-491
ISBN: 978-989-758-585-2; ISSN: 2184-2809
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

tors via a two-stage association procedure. The first
stage associates object detections from different sen-
sor modalities, while in the second stage, a tracking
formulation that allows to update track states is em-
ployed (Kim et al., 2021). Another sensor fusion
approach (Ali et al., 2013) utilizes stereo camera to
extract body and face features and uses LiDAR for
extraction of legs features, combining these features
to classify the target person. However, it only works
when target faces towards the robot, which is a limi-
tation for person following task. For multiple object
tracking (MOT) a single-shot network for simultane-
ously detecting objects and extracting tracking fea-
tures is applied to real-time calculation (Guo et al.,
2020). Some models also learn to manage to track life
circles in a data-driven approach (Chiu et al., 2021).
In an approach, a marker-based solution was in-
troduced for the tracking task (Lenain et al., 2018a).
At this method not only the magnetic but also the op-
tical and acoustic and inertial tracking are described
and also evaluated.
2.2 Motion Planning Methods
The Directive circle (DC) method designs a collision-
free, near-optimal path for a mobile robot to chase
another mobile robot by avoiding moving obstacles.
Finding the shortest path to the another mobile robot
is the first step at the algorithm. Then, the collision-
free directions of the robot are computed using the
velocity vectors and the Directive Circle (Masehian
and Katebi, 2007). The collision-free path closest to
the optimal path is then found. These subtasks are
repeated one after the other until the two objects meet.
A novel potential field based motion planning
method was introduced where a switching strategy
can be used between the attractive potential of the tar-
get and a novel helicoidal potential field (Fedele et al.,
2017). The helicoidal potential field helps to bypass
an obstacle that has a motion around the agent.
The motion planning algorithms can be used also
for Off-road mobile robots (Lenain et al., 2018b).
A novel motion planning method was introduced for
four wheel steering mobile robot that allows the mo-
tion capacity with respect to a normal car-like mobile
robot, while the friction can be reduced.
The main concept of the Velocity Obstacles algo-
rithm (VO) (Fiorini and Shiller, 1998) is to select a
velocity vector that would result in a collision-free
motion for the agent if the position and velocity in-
formation of the obstacles is known at every sampling
time.
B
i
defines the obstacles (i = 1...m where m de-
fines the actual number of obstacles that occur in the
Figure 1: Velocity Obstacles method.
workspace of the agent) and the agent is A.
All velocity vectors of the agent can be calculated
that would cause a collision between the obstacle (B
i
)
and robot (A) in a future time, this sets are the VO
i
cones:
VO
i
= { v
A
| ∃ t : p
A
+ v
A
t ∩ p
Bi
+ v
Bi
t 6= 0} (1)
where v
A
and v
Bi
are the velocity vectors and p
A
and
p
Bi
are the positions of the agent and the obstacle. As
an assumption, both the robot and the obstacles are
disk-shaped and the velocities of the obstacles and the
agent are unchanged until t.
The whole VO can be determined as the union of
the different VO
i
sets if there are more obstacles as:
VO = ∪
m
i=1
VO
i
(2)
Figure 1 represents an example where a moving
obstacle is in position p
B1
and it has velocity v
B1
at the current time. There is a static obstacle in the
workspace with position p
B2
. The two VO areas are
depicted with blue color.
After calculating the VO
i
sets, the Reachable Ve-
locities (RV) can be determined that consist every v
A
velocity vector of the agent that is reachable consid-
ering the previously selected velocity vector. After
the subtraction of the VO from the RV the Reachable
Avoidance Velocities (RAV) can be received.
3 HUMAN TRACKING
VELOCITY OBSTACLES
METHOD
In this Section, the Human Tracking Velocity Obsta-
cles (HTVO) motion planning algorithm is introduced
where the Directive Circle and the Velocity Obstacles
methods are combined and extended. Using this novel
Motion Planning for Mobile Robots using the Human Tracking Velocity Obstacles Method
485

Figure 2: Precheck algorithm.
method, the human tracking and obstacle avoidance
aspects can be considered at the same time, generat-
ing a collision-free motion for the agent in the dy-
namic workspace.
3.1 Precheck Algorithm
At the beginning of the algorithm, it has to be se-
lected, which obstacles play the less role in the mo-
tion of the agent so which VO
i
could be eliminated
from the workspace of the robot at the sampling time.
This step could be called Precheck algorithm.
In Figure 2, the Precheck algorithm is shown.
Two different aspects can be considered while se-
lecting the obstacle to be discarded:
• which obstacle will be reached in the longest time
in the workspace of the robot
• at that time, how large will be the distance be-
tween the robot and the obstacle.
So for every obstacle, the minimum time and dis-
tance must be calculated when the agent and the ob-
stacle are closest to each other during their motion.
t
min
A,Bi
=
−(p
A
− p
Bi
)(v
A
− v
Bi
)
||v
A
− v
Bi
||
, (3)
where t
min
A,Bi
presents the time interval when the robot
and the obstacle will be nearest to each other. If the
value of this parameter is a negative number, then it
was in the past. ||.|| represents the secondary norm.
Between the agent and the obstacle, the minimal
distance can be calculated:
d
min
A,Bi
= ||(p
A
+ v
A
t
min
A,Bi
) − (p
Bi
+ v
Bi
t
min
A,Bi
)||,
(4)
So only those obstacles must be considered that
fulfill the next equation:
0 < t
min
A,Bi
< 2 ∗ T
precheck
AND
d
min
A,Bi
< v
max
∗ T
precheck
(5)
Figure 3: Virtual target and Directive Circle in HTVO.
where v
max
means the maximum velocity that the
robot can reach and T
precheck
is a parameter of the
algorithm that must be tuned. This parameter can
be setted using apriori knowledge. Our experiments
showed that if the value of the T
precheck
parameter is
too small, it generates not a smooth path for the agent.
3.2 Velocity Selection for the Robot
For the human tracking and collision avoidance task,
a novel motion planning algorithm, the Human Track-
ing Velocity Obstacles method can be used which is
based on the combination of Directive circle and the
Velocity Obstacles. Both the obstacles and the hu-
man are represented with circles. In that case, a vir-
tual target must be introduced which is always behind
the real target position (the human that the agent fol-
lows). The distance between the real and the virtual
target position is always constant. In Figure 3, goal
presents the real goal position, v
goal
is the velocity
vector of the human and goalV is the virtual target
position with v
goalV
velocity vector with an end point
of N which is the same velocity vector as the human
has (v
goalV
= v
goal
). The distance between the human
and the virtual target position is the constant Dsafety.
The robot is in position p
A
. The DC circle is pre-
sented with green color which represents a circle with
a radius of the maximum velocity v
max
of the agent.
M denotes the end point of the velocity v
goalV
if it
starts from p
A
. Where M − N section intersects the
DC circle, it will be the velocity vector of the robot
which will generate a motion for the agent resulting
in reaching the virtual target position. This velocity
vector must be selected for the robot if it is in the RAV
set, considering the RV and VO sets in the workspace.
A grid based velocity map is introduced to the RV
set so if the desired velocity vector is not in the RAV
set, then a grid-based velocity selection can be used.
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
486

Figure 4: VOs for HTVO.
In Figure 3, the presented method can be seen.
There are several situations that can be considered
in the velocity selection method (similarly to (Mase-
hian and Katebi, 2007)):
• If there are no intersection point between the DC
and the MN section then the human tracking task
is not solvable because the robot cannot select a
velocity vector that is large enough to reach the
virtual target position
DC ∩ MN =
/
0 (6)
• If there is one intersection point between the DC
and the MN section (p
1
), then it is the solution for
the velocity selection task.
DC ∩ MN = p
1
(7)
v
A
= p
1
(8)
• If there are two intersection points between the
DC and the MN section (p
1
and p
2
), then that
point must be selected which is closer to point N:
DC ∩ MN = {p
1
, p
2
} (9)
v
A
= argmin
p
i
||N − p
i
|| (10)
• If there are two intersection points between the
DC and the MN section (p
1
and p
2
), and N is sit-
uated between these two points, then N must be
selected as the velocity vector of the agent. This
situation can occur when the robot will reach the
virtual target position in the next time step:
DC ∩ MN = {p
1
, p
2
} AND N ∈ p
1
p
2
(11)
v
A
= N (12)
Figure 5: Steps of the HTVO algorithm.
• If the human stands in a position and it has no ve-
locity vector, then the virtual goal is also a static
point. In that case, the robot has to reach the vir-
tual goal position as fast as it is possible. The ve-
locity vector can be calculated as:
v
A
=
goalV − p
A
||goalV − p
A
||
· min(v
max
, ||goalV −p
A
||),
(13)
• If the desired velocity vector that would cause an
appropriate virtual target reaching is not in the
RAV set, then the nearest velocity vector must be
selected from the introduced grid.
DC ∩ MN 6∈ RAV (14)
v
A
= argmin
v
Grid(i)
||(DC ∩ MN) − v
Grid(i)
||,
(15)
where every grid point must be investigated.
In Figure 4, a situation is represented where the
velocity vector which would result the best human
tracking solution is not reachable, so the nearest grid
point will be selected for the agent from the RAV set.
The grid points are the red x-s and the RAV set is pre-
sented with the yellow area.
Motion Planning for Mobile Robots using the Human Tracking Velocity Obstacles Method
487

Figure 6: Simulation result in MATLAB, there is one ob-
stacle in the workspace.
3.3 Visibility Check
In every sampling time, it must be investigated whe-
ther the human that the robot has to follow is visible or
not. If it is visible than the velocity selection method
can be used that was introduced in Section 3.2. The
human is visible if minimum one point is observable
from itself using a sensor (e.g.: LiDAR). If the human
is not visible, the agent stops until the robot receives
information from the human again.
In Section 4, there will be an example, where the
human is not visible.
In Figure 5, the steps of the HTVO algorithm can
be seen. After calculating the VO-s and RAV sets, it
must be checked whether there are available veloc-
ity vectors in the RAV or not. If no, then the motion
planning for the mobile robot is not executable and
the agent stops. If the RAV set is not empty, then the
visibility check is the next step. If the Human is not
visible, then the agent must stop, on the other hand,
if it is visible, then the velocity vector for the robot
can be calculated using the HTVO method. Using this
velocity vector for one time step, the whole method
should execute again until the end of the motion is
not reached.
4 SIMULATION RESULTS
In this section, the simulation results of the Human
Tracking Velocity Obstacles are presented. In every
simulation, the motion planning of an omnidirectional
robot is presented, that follows the human.
4.1 MATLAB Simulation
The motion planning algorithm was implemented first
in MATLAB environment. In every simulation result,
the obstacles have constant velocity vectors. In Fig-
ure 6, there is one obstacle in the workspace of the
robot which crosses the line between the robot and
the human. The obstacle is presented with blue cir-
cle with velocity vector v
B1
and the human (moving
person) is a lila circle with velocity vector v
p1
. The
robot is shown as a green circle with velocity vector
v
A
. The robot has always the opportunity to select the
velocity vector which will result in the human track-
ing method. In the middle of the motion, the human
is not visible because of the obstacle. In that case the
robot slows down and continues the motion only if the
human is visible again. The average running time is
0.0016 s, so the introduced method can be also used
in real time scenarios. The simulations were tested
using the following environment:
• Processor: Intel(R) Core(TM) i5-3320M CPU @
2.60 GHz
• Operation system: Win10, 64 bites
• Memory (RAM): 8,00 GB
• MATLAB 2021a
The motion of the robot can be seen in the following
video (Gyenes, 2022a).
4.2 ROS-Gazebo Simulation
ROS (Robot Operating System) is an open source
software development kit for robotics applications. It
provides developers in a variety of industries with a
standard software platform to aid in research and pro-
totyping, deployment and production.
Robot simulation is a necessary tool in testing
the results of the motion planning algorithms. Well-
designed simulators can quickly test algorithms, de-
sign models, perform tests, and train AI systems
using real-world scenarios. Gazebo provides the
ability to accurately and efficiently simulate robotic
populations in complex indoor and outdoor environ-
ments. To integrate ROS with stand-alone Gazebo, a
set of ROS packages offer wrappers for Stand-alone
Gazebo. They provide the essential interfaces to sim-
ulate robots in Gazebo with ROS messages, services
and dynamic reconfiguration.
Since in simulation phase, we do not receive data
from real sensor while the controller needs the posi-
tion and velocity information of target and obstacle as
input, two nodes are created in ROS to publish needed
information of goal and obstacle respectively. After-
wards the controller node subscribes the essential data
of virtual objects and then calculates the output ac-
cording to the programmed algorithm and finally pub-
lishes velocity command. The introduced solution of
the ROS graph can be seen in Figure 7.
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
488

Figure 7: ROS graph of the motion planning method.
Figure 8: The robot follows the person while an another
person passes the path.
Two scenarios were tested in ROS-Gazebo envi-
ronment.
1. The mobile robot follows a person who walks
along a straight-line trajectory, while another per-
son (as an obstacle) passes by, which makes the
goal invisible to the mobile robot. In this case, the
robot would stop moving according to the intro-
duced algorithm until it could receive the infor-
mation of its goal again after the obstacle moved
away. The presented example can be seen in Fig-
ure 8. Figure 9 left side represents the path of the
robot and the human that the agent follows. It can
be seen that the robot stops when the other per-
son crosses the line and after that follows the tar-
get person. The right side of the picture shows the
distance between the human and the robot, and the
desired distance and the minimum keeping dis-
tance. It can be seen that during the motion, the
distance will be even smaller until the desired dis-
tance is reached. There is a little offset between
the desired and the actual distance in the end of
the motion, it is because the actuators and the de-
lays of the system but it does not influence the so-
lution of the motion planning method. The motion
of the robot can be seen in the following video as
well (Gyenes, 2022b).
2. The mobile robot follows a goal person who walks
along a straight-line trajectory, while a static ob-
stacle stays between the target and robot. The goal
person is still visible to robot although this obsta-
cle exists. In this case the robot should manage
to get around the obstacle generating an evasive
maneuver and continues to track its target.
This case can be seen in Figure 10.
The path of the the motion can be seen in Fig-
ure 11, where an evasive maneuver is generated
considering the static obstacle and after that, the
target person is followed. On the right side of
this figure, the distance can be seen between the
agent and the person, which reaches the desired
distance during the motion of the agent. In both
examples, the human tracking task can be reached
while the collision avoidance task is solved. The
result of the motion can be seen in the following
video (Gyenes, 2022c).
5 CONCLUSIONS
In this work, a novel motion planning algorithm was
introduced for mobile robots where the human track-
ing method can be executed with considering the col-
lision avoidance method at the same time. With this
method, the agent can reach and keep a given distance
to the target person and result in a collision-free mo-
tion in dynamic environment. The novel motion plan-
ning method was tested and validated in two differ-
ent environments in different test-cases. As a future
work, the introduced method would be tested on an
omnidirectional mobile robot (with four omnidirec-
tional wheels). The introduced algorithm can be also
compared with an another human tracking algorithm
based on Model Predictive Control (MPC). The intro-
duced method could be used in the future in different
real case situations (e.g. hospitals, airports) where it
could help the people everyday life.
Motion Planning for Mobile Robots using the Human Tracking Velocity Obstacles Method
489
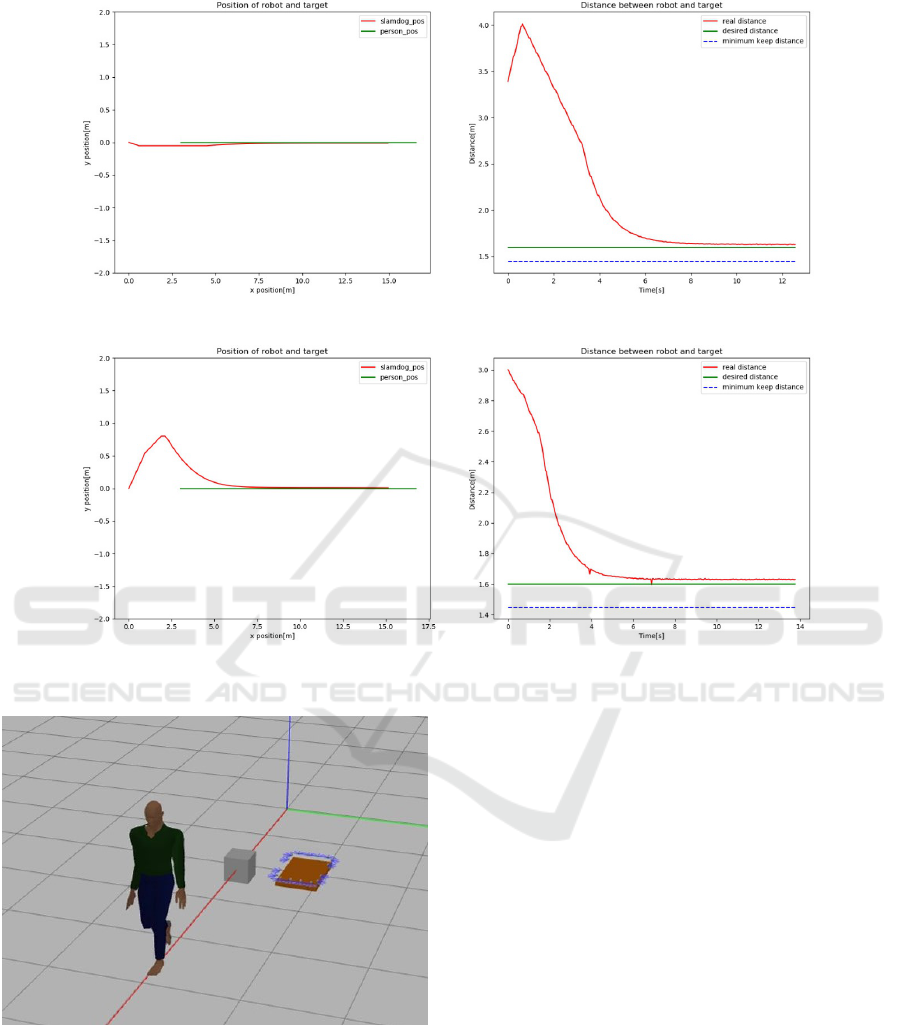
Figure 9: The path and the distance of the robot and the target.
Figure 11: The path and the distance of the robot and the target in the case if there is a static obstacle between the robot and
the human.
Figure 10: The robot follows the person while a static ob-
stacle is in the workspace.
ACKNOWLEDGEMENTS
The research was supported by the DAAD Short-term
Research Scholarship. Additionally, the research re-
ported in this paper is part of project no. BME-NVA-
02, implemented with the support provided by the
Ministry of Innovation and Technology of Hungary
from the National Research, Development and Inno-
vation Fund, financed under the TKP2021 funding
scheme.
REFERENCES
Ali, B., Iqbal, K. F., Ayaz, Y., and Muhammad, N. (2013).
Human detection and following by a mobile robot us-
ing 3D features. In 2013 IEEE International Confer-
ence on Mechatronics and Automation, pages 1714–
1719. ISSN: 2152-744X.
Bewley, A., Ge, Z., Ott, L., Ramos, F., and Upcroft, B.
(2016). Simple online and realtime tracking. In 2016
IEEE International Conference on Image Processing
(ICIP), pages 3464–3468.
Chiu, H.-K., Li, J., Ambrus¸, R., and Bohg, J. (2021).
Probabilistic 3D Multi-Modal, Multi-Object Track-
ing for Autonomous Driving. In 2021 IEEE In-
ternational Conference on Robotics and Automation
(ICRA), pages 14227–14233. ISSN: 2577-087X.
Ch’ng, C.-H., Liew, S.-Y., Wong, C.-S., and Ooi, B.-Y.
(2020). An Efficient Multi-AMR Control Framework
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
490

for Parcel Sorting Centers. In 2020 IEEE Sensors Ap-
plications Symposium (SAS), pages 1–6.
Fedele, G., D’Alfonso, L., Chiaravalloti, F., and D’Aquila,
G. (2017). Path planning and obstacles avoidance
using switching potential functions. In Proceedings
of the 14th International Conference on Informat-
ics in Control, Automation and Robotics - Volume 2:
ICINCO,, pages 343–350. INSTICC, SciTePress.
Fiorini, P. and Shiller, Z. (1998). Motion planning in dy-
namic environments using velocity obstacles. The in-
ternational journal of robotics research, 17(7):760–
772.
Guo, E., Chen, Z., Fan, Z., and Yang, X. (2020). Real-time
Detection and Tracking Network with Feature Shar-
ing. In 2020 IEEE International Conference on Vi-
sual Communications and Image Processing (VCIP),
pages 519–522. ISSN: 2642-9357.
Gyenes, Z. (2022a). Icinco conference paper, simulation in
matlab. https://youtu.be/SKNefY399Co. Accessed on
2022/04/21.
Gyenes, Z. (2022b). Icinco conference paper, simulation
in ros-gazebo (1). https://youtu.be/FZFnf7xBhAk.
Accessed on 2022/04/21.
Gyenes, Z. (2022c). Icinco conference paper, simulation in
ros-gazebo (2). https://youtu.be/1xABzIMZ3uc.
Jung, J. (2020). Woowa Brothers to Debut New Dilly Drive
at End of Year. https://www.koreatechtoday.com/woo
wa-brothers-to-debut-new-dilly-drive-at-end-of-yea
r/. Section: Food Service.
Kim, A., O
ˇ
sep, A., and Leal-Taix
´
e, L. (2021). EagerMOT:
3D Multi-Object Tracking via Sensor Fusion. In 2021
IEEE International Conference on Robotics and Au-
tomation (ICRA), pages 11315–11321. ISSN: 2577-
087X.
Lenain, R., Nizard, A., Deremetz, M., Thuilot, B., Papot,
V., and Cariou, C. (2018a). Path tracking of a bi-
steerable mobile robot: An adaptive off-road multi-
control law strategy. In Proceedings of the 15th In-
ternational Conference on Informatics in Control, Au-
tomation and Robotics - Volume 2: ICINCO,, pages
163–170. INSTICC, SciTePress.
Lenain, R., Nizard, A., Deremetz, M., Thuilot, B., Papot,
V., and Cariou, C. (2018b). Path tracking of a bi-
steerable mobile robot: An adaptive off-road multi-
control law strategy. In Proceedings of the 15th In-
ternational Conference on Informatics in Control, Au-
tomation and Robotics - Volume 2: ICINCO,, pages
163–170. INSTICC, SciTePress.
Masehian, E. and Katebi, Y. (2007). Robot motion planning
in dynamic environments with moving obstacles and
target. International Journal of Mechanical Systems
Science and Engineering, 1(1):20–25.
Qian, Y., Shi, H., Tian, M., Yang, R., and Duan, Y. (2020).
Multiple Object Tracking for Similar, Monotonic Tar-
gets. In 2020 10th Institute of Electrical and Elec-
tronics Engineers International Conference on Cyber
Technology in Automation, Control, and Intelligent
Systems (CYBER), pages 360–363. ISSN: 2379-7711.
Reiser, U., Connette, C., Fischer, J., Kubacki, J., Bubeck,
A., Weisshardt, F., Jacobs, T., Parlitz, C., H
¨
agele, M.,
and Verl, A. (2009). Care-O-bot® 3 - creating a prod-
uct vision for service robot applications by integrating
design and technology. In 2009 IEEE/RSJ Interna-
tional Conference on Intelligent Robots and Systems,
pages 1992–1998. ISSN: 2153-0866.
Valdez, M., Cook, M., and Potter, S. (2021). Humans and
robots coping with crisis – Starship, Covid-19 and
urban robotics in an unpredictable world. In 2021
IEEE International Conference on Systems, Man, and
Cybernetics (SMC), pages 2596–2601. ISSN: 2577-
1655.
Wojke, N., Bewley, A., and Paulus, D. (2017). Simple on-
line and realtime tracking with a deep association met-
ric. In 2017 IEEE International Conference on Image
Processing (ICIP), pages 3645–3649.
Xiang, Y., Alahi, A., and Savarese, S. (2015). Learning
to Track: Online Multi-object Tracking by Decision
Making. In 2015 IEEE International Conference on
Computer Vision (ICCV), pages 4705–4713, Santiago,
Chile. IEEE.
Yang, M. and Jia, Y. (2016). Temporal dynamic appearance
modeling for online multi-person tracking. Computer
Vision and Image Understanding, 153:16–28.
Motion Planning for Mobile Robots using the Human Tracking Velocity Obstacles Method
491
