
A Computer Vision Approach to Predict Distance in an Autonomous
Vehicle Environment
Giuseppe Parrotta, Mauro Tropea
a
and Floriano De Rango
b
DIMES Department, University of Calabria, via P. Bucci 39c, 87036 Rende (CS), Italy
Keywords:
Autonomous Vehicles, Autonomous Guide, Computer Vision, Interpolation Technique, Machine Learning.
Abstract:
Autonomous vehicle (AV) is a kind of intelligent car, which is mainly based on the computer and sensor
system inside the car to realize driverless guide. The AVs are cars that recognize the driving environment
without human intervention, assess the risk, plan the driving route and operate on their own. These vehicles are
integrated with a series of sensors and other devices and software like automatic control, artificial intelligence,
visual computing in order to be able to perform driving inside a road. Calculate the correct distance between
vehicle and objects inside its trajectory is important to allow an autonomous guide in safety. So, in this paper
we describe our proposal of predicting this distance in a real scenario through an on-board camera and with
the support of rover, arm platforms and sensors. The proposal is to use an interpolation technique that permits
to predict distance with a good accuracy.
1 INTRODUCTION
An autonomous car, also known as an autonomous ve-
hicle (AV), driverless car or robo-car, is a vehicle ca-
pable of detecting the surrounding environment and
moving through it safely with or without human in-
tervention. By definition, autonomous vehicles are
able to update their maps based on sensor inputs, al-
lowing vehicles to keep track of their position even
when conditions change or when entering environ-
ments unknown to them (Talavera et al., 2021), re-
alizing driverless guide (Mariani et al., 2021). The
research on vehicular networks is most promising in
the last years approaching with the use of the mod-
ern techniques based on artificial intelligence and ma-
chine learning paradigms but also the Cloud, Edge
and Fog computing that aiding vehicles in the com-
putation processes. Moreover, the use of Internet of
Things (IoT) in the vehicular environment is another
important field of study object of different works in
literature (De Rango et al., 2022), (Tropea et al.,
2021). Many studies regard also routing (Fazio et al.,
2013), emission issues (Santamaria et al., 2019a),
channel modeling (Fazio et al., 2015).
Intelligent vehicles have a series of intelligent
agents integrated on multi-sensors that are based on
a
https://orcid.org/0000-0003-0593-5254
b
https://orcid.org/0000-0003-4901-6233
the perception and modeling of the environment, lo-
calization and construction of maps, path planning,
decision-making and motion control. An important
aspect in the AV context is also related to coordination
of group of vehicles forming that so called ”platoon”.
So, opportune coordination protocols have to be stud-
ied as shown in (Palmieri et al., 2019), (De Rango
et al., 2018) and then the execution of multiple tasks
for vehicles that operate in group (Palmieri et al.,
2018).
As it is possible to view in Figure 1 the main op-
erational functions performed by an AV are depicted
and described in the following. The ”perception and
modeling of the environment” module is responsible
for the perception of the structure of the environment,
relying on the support of multiple sensors and cam-
eras, and thus building a model of the surrounding
environment. The template attaches a list of moving
Figure 1: Intelligent vehicles operations.
348
Parrotta, G., Tropea, M. and De Rango, F.
A Computer Vision Approach to Predict Distance in an Autonomous Vehicle Environment.
DOI: 10.5220/0011318400003274
In Proceedings of the 12th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2022), pages 348-355
ISBN: 978-989-758-578-4; ISSN: 2184-2841
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

objects, obstacles, the relative position of the vehi-
cle with respect to the road traveled, the shape of the
road etc. Finally, this module provides the environ-
ment model and the local map to the ”map localiza-
tion and construction” module with the processing of
the initial data and the data provided by vision, lidar
or radar. The ”Localization and construction of the
maps” module uses geometric knowledge in estimat-
ing the position in the map to determine the position
of the vehicle and to interpret the information from
the sensors in order to estimate the geometric loca-
tion in the global map. As a result, this module deter-
mines a global map based on the environment model
and the local map. The “path planning and decision
making” module ensures the vehicle its safe interac-
tion in accordance with the rules of safety, comfort,
vehicle dynamics and environmental context. The last
module ”Motion Control” is responsible of the vehi-
cle movement in the map considering an autonomous
guide in a real environment. So, it executes the com-
mands necessary to travel the planned route, thus pro-
ducing interaction between the vehicle and the sur-
rounding environment.
In this paper, we propose the use of an interpola-
tion technique in order to compute distance between
vehicles and objects in the scene in order to have a
good precision and accuracy in the performed mea-
surements. First of all, throughout the use of machine
learning approach, the vehicle is able to identify the
object in front of it through the use of an on-board
camera, and then, on the basis of the proposed tech-
nique it is able to compute and predict with a good ac-
curacy the distance between itself and the recognized
object in its trajectory. The conducted experiments
are shown and the opportune considerations are ex-
plained in the rest of the paper. The structure of the
paper is the following: Section 2 described briefly the
main literature on autonomous vehicles; Section 3 de-
scribes the concept of obstacles recognition in the ref-
erence context; Section 4 shows the main conducted
experiments and the relative results; finally, the paper
ends with the conclusions provided in Section 5.
2 RELATED WORK
The future car will be able to guide in every con-
text without human intervention. The research in
these years is studying different mechanisms in or-
der to make the autonomous guide a real experi-
ence in a near feature. Six different levels of au-
tonomy are been individuated and nowadays the re-
search effort is related to last level, the level number 5,
that aims to make the guide completely autonomous
thanks to the great progress in technology, robotic and
electronic (Aut, 2022). Autonomous vehicles scan
the environment with techniques such as radar, lidar,
GNSS, and machine vision through on-board camera
(Jim
´
enez et al., 2018). Advanced control systems in-
terpret the information received to identify appropri-
ate routes, obstacles and relevant signs. So, in liter-
ature a lot of works exist that deal with this interest-
ing topic and many of these provide overview on dif-
ferent aspects concerning AVs, their communication
type (Duan et al., 2021), and on the impact that the
AVs will have in our cities (Duarte and Ratti, 2018).
The awareness of the environment is due, other than
different sensors, to camera/cameras placed in front
of the vehicle. A monocular vision for extracting im-
age features used for calculating pixel distance is pro-
posed in (Aswini and Uma, 2019).
In (Salman et al., 2017) the authors propose the
use of stereo camera to measure the distance of an
object and so avoiding obstacles in the navigation of
autonomous vehicles. Their measures are based on
angular distance, distance between cameras, and the
pixel of the image and using the trigonometry for
computing the object distance. In (Park and Choi,
2019) the authors present the detailed design and im-
plementation procedures for an advanced driver as-
sistance system, called ADAS, based on an open
source automotive open system architecture called
AUTOSAR. The main purpose of the work is to pro-
pose, in this type of architecture, a collision warning
system able to detect obstacles on the road. They pro-
vide a set of experimental results that can help de-
velopers to improve the overall safety of the vehic-
ular system. For their experiments actual ultrasonic
sensors and light-emitting diodes (LEDs) connected
to an AUTOSAR evaluation kit has been used with
the integration of a virtual robot experience platform
(V-REP). In (Kim et al., 2021) the authors deal with
the safety issues in an autonomous vehicle system.
They refer to Mobileye, a company that proposed the
RSS (responsibility-sensitive safety) model to prevent
the accidents of autonomous vehicles (Shashua et al.,
2018). This RSS model is a mathematical model that
aids to ensure safety trying to determine whether an
autonomous vehicle is at fault in an accident propos-
ing a safe distance. They propose a mechanism to cal-
culate safe distance for each velocity through the use
of a camera, in particular they calculate lateral and
longitudinal safe distance.
In (El-Hassan, 2020) the authors propose a small-
size prototype of an autonomous vehicle equipped
with low-cost sensors driving on an artificial road
structure. They have tested their experiments using
as obstacles a toy vehicle placed on the road traveled
A Computer Vision Approach to Predict Distance in an Autonomous Vehicle Environment
349

by the prototype. The experiments have shown that
it is able to detect the obstacle and turn to avoid col-
lision remaining on the correct road lane. In (Philip
et al., 2018) the authors study and analyze a smart
traffic intersection management application for auto-
mated vehicles by the point of view of the effect of de-
lay–accuracy trade-off in real-time applications. The
research is pushing also for autonomous electrical ve-
hicles in order to pay attention to the green and energy
consumption with many works that deal with these
topics (De Rango et al., 2020). An overview of the
enabling technology and the architecture of the Cog-
nitive Internet of Vehicles for autonomous driving is
presented in (Lu et al., 2019).
On the basis of the considered literature, in this
work we want to propose an approach to compute and
predict obstacles distance based on on-board camera
that uses an interpolation mechanism able to guaran-
teeing a good accuracy. The experimentation is done
with a real rover equipped with a camera and an ultra-
sonic sensor used for validate the distance calculated
through the on-board camera.
3 OBSTACLES RECOGNITION
In general, in a driving environment, we are inter-
ested in static/dynamic obstacles, road markings, road
signs, vehicles and pedestrians. Consequently, object
detection and tracking are the key parts of environ-
mental perception and modeling. The goal of vehicle
tracking and mapping is to generate a global map by
combining the environmental model, a local map and
global information. In autonomous driving, vehicle
tracking is to estimate the geometry of the road or lo-
cate the vehicle relative to the roads in the conditions
of known maps or unknown maps. Hence, vehicle lo-
cation refers to estimating the road shape and location
by filtering, transforming the vehicle’s location into a
coordinate frame.
In general, the perception and modeling of the sur-
rounding environment takes place in this way: [1.] the
original data is received and collected by the various
sensors; [2.] the different features are extracted from
the original data such as the color of the road (or ob-
jects), the stripes and the outlines of the buildings; [3.]
semantic objects are recognized thanks to the use of
classifiers and consist of stripes, signals, vehicles and
pedestrians; [4.] the driving context and the position
of the vehicle are deduced.
Sensors used for the perception of the surround-
ing environment are divided into two categories: ac-
tive and passive. Active sensors include lidar, radar,
ultrasound and radio, while commonly used passive
sensors are infrared and visual cameras (Wang et al.,
2022). The visual analysis of complex scenes, where
the essence of the objects present cannot be cap-
tured by purely geometric models, is one of the most
difficult challenges in present and future research,
greatly used in video surveillance systems (Santa-
maria et al., 2019b). Robotic perception is related to
many applications in robotics where sensory data and
artificial intelligence/machine learning (AI/ML) tech-
niques are involved.
Nowadays, most robotic perception systems use
machine learning (ML) techniques which can be in
the form of unsupervised learning or supervised clas-
sifiers using features or deep learning neural networks
(e.g., convolutional neural network (CNN)) or even a
combination of multiple methods. Each object pro-
cess receives image data (pixels) from the video sec-
tion of the vision system and continuously generates
a description of the assigned object. In the first phase,
the extraction of the features, the groups of pixels are
combined into features, such as edges or corners. Fea-
ture extraction can be supported by the next higher
level in the processing hierarchy, the 2D object level.
Here, knowledge of the appearance of specific phys-
ical objects is used to generate hypotheses about the
nature of the object itself and the expectations of the
features that should be visible and where they should
appear in the image. Many features can be detected
but they differ on the basis of the distance of the ob-
ject. Greater is this distance lesser defined are the
edge of the image. The study of the structure of an
image is essential to understand how to apply the al-
gorithms that allow to process and interpret the image.
The extraction of the reference points is carried out
through an edge detection algorithm. In order to rec-
ognize the image in the scene, in this paper, we have
used a machine learning approach. So, we are able to
identify the object in front of the vehicle and through
the use of the camera on-board we are able also to
compute the correct distance from the recognized ob-
ject. In the following section, we will describe the
conducted experiments explaining in detail the envi-
ronment and the scene considered for the tests.
4 EXPERIMENTATION
The purpose of the experimental work is to trace
the actual value of the distance between the obsta-
cle placed in front of the rover (model car, see Fig-
ure 2), managing to obtain this data exclusively with
the aid of the video camera (with which the model
car is equipped) and with the support of the instru-
ments offered by OpenCV computer vision libraries
SIMULTECH 2022 - 12th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
350

and APIs for programming TensorFlow neural net-
works. Thanks to this it was possible for each object
placed in front of the camera to recognize and identify
each object with an average accuracy of 70% and to
predict the value of the distance of the obstacle from
the rover.
Figure 2: Rover used for experiments.
4.1 Environment Description
Regarding used hardware, the rover, the Arduino
UNO rev3 and Raspberry Pi4B platforms specially
mounted on the body of a model car equipped with
4 motors that provide traction were used for the de-
velopment and implementation of the embedded au-
tonomous driving system, see Figure 2. From soft-
ware side, instead, the algorithms have been de-
veloped for Arduino through its IDE and the pro-
gramming language Wiring, derived from C and C
++. While for Raspberry, based on the Linux Rasp-
bian operating system, the software was developed in
Python with the help of the Mu IDE. The recognition
algorithms were developed using the OpenCV soft-
ware library and TensorFlow models.
For the rover, being equipped with a camera and
an ultrasonic proximity sensor, a recognition algo-
rithm was developed to be able to identify the ob-
jects in front of them and calculate their distance.
This algorithm was developed in Python and with the
support provided by the OpenCV and TensorFlow li-
braries. The video stream is first initialized by re-
ceiving the images supplied by the camera as input.
The captured frame is normalized and resized with
the support of computer vision (offered by OpenCV),
after which object recognition is performed by an al-
ready trained artificial intelligence in charge of object
recognition only. The tensor outputs the object name
and the recognition accuracy percentage. This infor-
mation is returned to the screen with OpenCV which
also builds the box that frames the object. Further-
more, when the object is recognized, the script cal-
culates the distance value by means of the sensor and
returns this value to the screen as before with the help
of OpenCV. At the end of the analysis of this frame,
we move on to the next one and repeat this process.
The user can also decide to stop the execution of the
algorithm at any time. In the case of object is recog-
nized, this will automatically be surrounded by a box
that delimits the area covered by it and the name and
the percentage of accuracy in the recognition will be
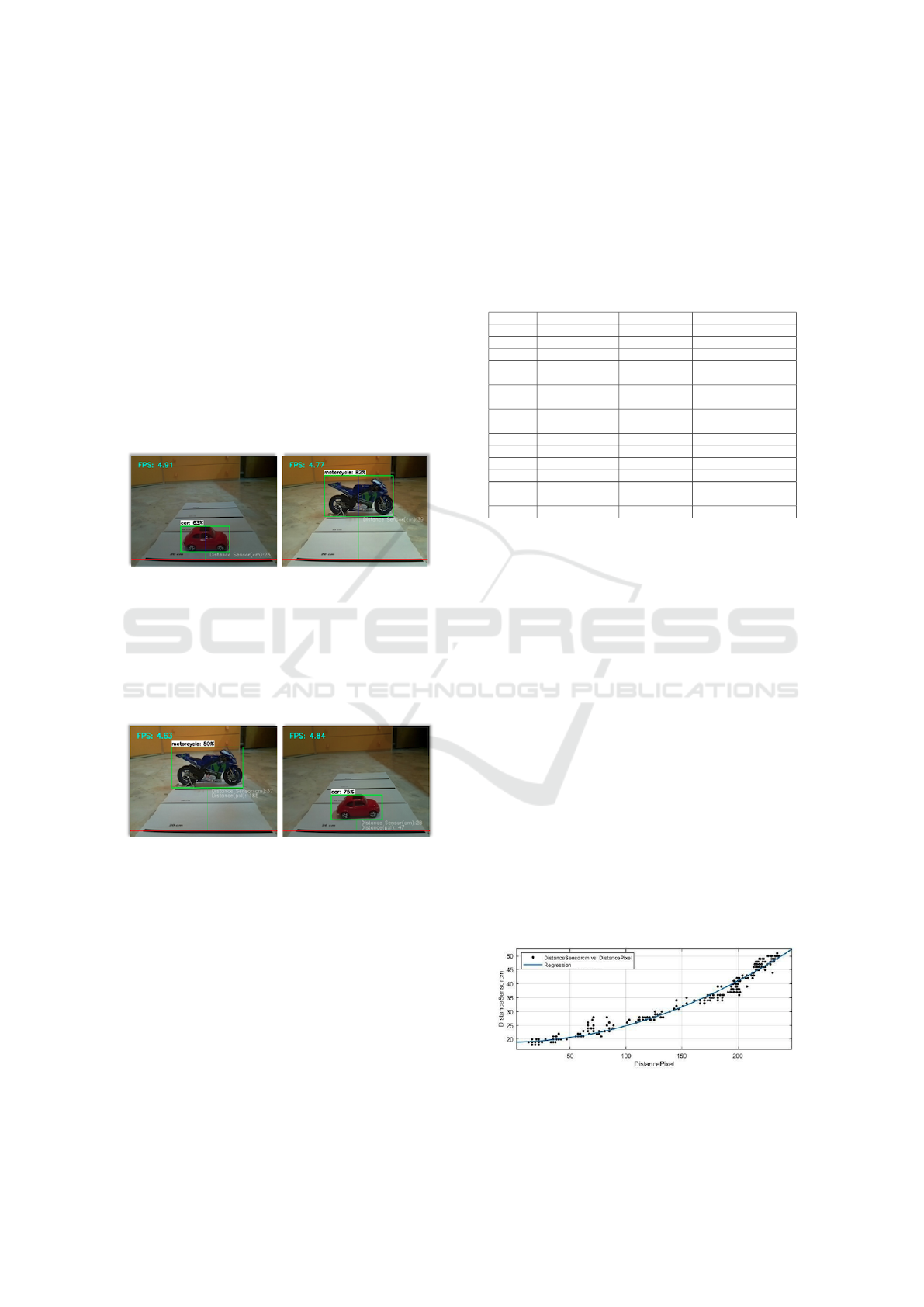
indicated. Pictures in Figure 3 are shown as an exam-
ple of how this recognition system works.
Figure 3: Example of how the recognition algorithm identi-
fies the different objects in the space and indicates the pos-
sible name and percentage of accuracy.
First of all, it was necessary to calibrate the con-
sidered scene thanks to the ultrasonic sensor the rover
is equipped with and which provided a very true and
precise estimate of the distances that are detected, see
Figure 4.
Figure 4: Example of measures performed by sensor and
verified by the use of a rule in order to compute the preci-
sion.
The measurements made by the sensor were ver-
ified with the aid of a rule to certify their accuracy.
On the basis of this, a template was built which con-
A Computer Vision Approach to Predict Distance in an Autonomous Vehicle Environment
351
sists of a print with lines separated from each other
by 10 centimeters which was useful for having at this
stage some real and concrete references of the mea-
surements at the time of future sampling. Then, a ref-
erence in the scene was placed and highlighted with a
red line at a distance of 20 centimeters from the front
of the car. This distance was considered as safety dis-
tance to avoid collisions between the rover and ob-
stacles present in the trajectory. For each frame and
for each recognized object (highlighted by its box)
we have identified the exact center of the rectangle,
called ”C”, that defines a characteristic point of a sin-
gle object, see Figure 5. Once this reference point
has been identified, it is projected on the basis of the
relevant object identification box, and will be defined
hereinafter as ”center of gravity”, see Figure 6.
Figure 5: The center ”C” is projected on the lower edge of
the frame to identify the characteristic point called ”center
of gravity”.
Thus, having found for each object its ”center
of gravity” it was possible to estimate the distance
in pixels between that point and the red safety line
placed in the scene.
Figure 6: The ”center of gravity” permits to estimate the
distance in pixel between the object and the red line (dis-
tance of security).
4.2 Experimental Results
On the basis of the distance obtained in pixels and that
measured by means of the ultrasonic proximity sen-
sor, a Python script was developed which collects and
saves the aforementioned data for each frame in an
Excel sheet useful for subsequent analysis. First, the
Excel file is created which indicates in which columns
the data must be entered and the label assigned for
each. In order to produce and collect data, by means
of the script, various objects were placed in front of
the rover and for each of these it was possible to de-
fine an effective distance measured in centimeters,
which we will call ”Distance Sensor cm” and a dis-
tance from the ”center of gravity” expressed in pixels,
defined as “Distance Pixel”. In Table 1 some exam-
ples from sampling of an object of type ”cell phone”
are reported.
Table 1: Examples taken from sampling of an object of type
”cell phone”.
Date Object Detected Distance Pixel Distance Sensor (cm)
19:10:40 cell phone: 73% 37 19
19:10:40 cell phone: 67% 35 19
19:10:41 cell phone: 64% 33 19
19:10:41 cell phone: 66% 25 19
19:10:41 cell phone: 64% 22 19
19:10:41 cell phone: 66% 22 18
19:10:42 cell phone: 68% 19 18
19:10:42 cell phone: 68% 19 18
19:10:42 cell phone: 68% 19 18
19:10:42 cell phone: 67% 16 20
19:10:42 cell phone: 68% 19 18
19:10:43 cell phone: 67% 22 18
19:10:43 cell phone: 67% 19 18
19:10:43 cell phone: 66% 19 18
19:10:43 cell phone: 66% 22 19
19:10:43 cell phone: 67% 22 19
Hence, the need to find the mathematical relation-
ship by means of a function between the ”distance in
centimeters” data (which is remembered to be the one
measured with the sensor) and the ”distance in pix-
els” data (pixels between the center of gravity and
the safety line). The support offered by Matlab, and
in particular its ”Curve Fitting” application helped
in this case. The data was then imported into the
Workspace with the ”ImportData” function in 2 col-
umn vectors identified by the labels ”DistancePixel”
and ”DistanceSensorCm”. At this point, given these
vectors to ”Curve Fitting”, it was possible to iden-
tify the resulting polynomial interpolation function of
grade 2:
f (x) = p
1
· x
2
+ p
2
· x + p
3
(1)
where p
i
assumes the following values: p
1
=
0.0005112, p
2
= 0.008219, p
3
= 18, 96.
The value of the function f (x) represents the value
of the distance in centimeters calculated varying the
values of x. In this case, these values represent the
values of the distance expressed in pixels.
Figure 7: Quadratic regression function.
Following the function thus obtained from the re-
SIMULTECH 2022 - 12th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
352

lationship between the collected data, it was possi-
ble to add to the script a function for calculating this
distance called ”InterpolationDistance”. For this rea-
son, a second data collection was proposed with the
methodology indicated above and it was possible to
relate the distance in pixels and the measurement of
the distance obtained with the interpolation function,
see Figure 7. For completeness and comparison for
each pair of data, the distance value calculated thanks
to the sensor was also taken into account as a verifi-
cation value. What was obtained is summarized in an
extract from the sampling reported in Table 2.
Table 2: Extract of the sampling on a ”cell phone” object
where the distance value was calculated with the interpola-
tion function.
Date Object Detected Distance Pixel Distance Sensor (cm) Interpolation Grade 2
19:11:15 cell phone: 83% 126 28 28,1114052
19:11:15 cell phone: 82% 126 28 28,1114052
19:11:15 cell phone: 82% 126 28 28,1114052
19:11:16 cell phone: 83% 126 28 28,1114052
19:11:16 cell phone: 82% 126 28 28,1114052
19:11:16 cell phone: 82% 126 28 28,1114052
19:11:16 cell phone: 83% 126 28 28,1114052
19:11:16 cell phone: 82% 126 28 28,1114052
19:11:17 cell phone: 83% 126 29 28,1114052
19:11:17 cell phone: 83% 128 29 28,3875328
19:11:17 cell phone: 83% 130 29 28,6677500
19:11:17 cell phone: 83% 128 29 28,3875328
19:11:17 cell phone: 81% 132 30 28,9520568
From the so obtained data it was possible to com-
pare the value of the distance calculated with the aid
of the sensor and that calculated with the interpolation
function of grade 2, see Figure 8.
Figure 8: Blue curve highlights the distance values com-
puted by sensor while the red curve highlights the distance
values computed with the interpolation function.
Therefore, it can be seen from Figure 8, where the
distance measurement for each sample is related, that
the functions called ”distanceSensor” and ”Interpola-
tionGrade2” are relatively close and close in identify-
ing the actual distance of the object. However, it is
noted that in some intervals, due to possible errors in
the sampling or in the provided estimation, the two
functions settle on different values. Hence, the need
to calculate the percentage error between the results
produced by the two functions. For each sample the
error was calculated in this way:
error percentage =
|sensor value − interpolation value|
sensor value
∗ 100(%) (2)
Lastly, an average of the error was calculated over
the whole sample:
error percentage average =
∑
error percentage value
samples
∗ 100(%) (3)
We have obtained a value of:
error percentage average = 3, 76%. For the
sake of completeness, it was decided to submit the
same data to a higher grade interpolation, with a
cubic regression, so as to verify whether it is more
efficient and whether the consistency between the
calculated distance and that provided by the sensor
is greater than in the previous case, see Figure 9.
We proceeded in the same way seen before and the
function provided by ”Curve Fitting” is the following:
f (x) = p
1
· x
3
+ p
2
· x
2
+ p
3
· x + p
4
(4)
where p
1
= 3, 773e
−6
, p
2
= −0.000914, p
3
=
0.1536 and p
4
= 15.91.
Figure 9: Cubic regression function.
By applying this function to the set of data ob-
tained, it is possible to compare them to the actual
distance measurement provided by the instrument, be-
ing able to state that the distance value obtained in
this way considerably increases the error and provid-
ing wrong data as it is possible to observer in Figure
10.
4.2.1 Error Correction
In order to reduce the sensitive difference that arose
between the actual distance measurement and the one
calculated thanks to the quadratic interpolation func-
tion, it was decided to act as follows.
A Computer Vision Approach to Predict Distance in an Autonomous Vehicle Environment
353

Figure 10: Blue curve highlights the distance values com-
puted by sensor while the red curve highlights the distance
values computed with the interpolation function.
Applying again the methodology seen previously,
it was possible to find a second interpolation function
called ”error correction” of grade 3 and defined as fol-
lows:
f (x) = p
1
· x
3
+ p
2
· x
2
+ p
3
· x + p
4
(5)
where p
1
= 0.001113, p
2
= −0.1083, p
3
= 4, 327
and p
4
= −32.11.
So, we have the following graphic, see Figure 11.
Figure 11: Error correction function: cubic regression.
By applying this error correction function to the
values obtained from the previous interpolation, I ob-
tain results that respond better and are closer to the
real ones calculated by means of the sensor, as can
be seen from the following graphic, Figure 12. An
extract of the sampling of ”cell phone” object is re-
ported in Table 3. Also for this second case series, the
percentage error was calculated on all the samples, in
the same way and with the same methodology seen
in the case of grade 2 interpolation, and its average
was equal to: error percentage average = 3, 2381%.
This result shows the better error percentage consid-
ering also the error correction function.
The drawback of the proposed technique is that it
is not able to guarantee a good distance prediction for
Figure 12: The blue function highlights the distance value
for each sample returned by the sensor, while the orange
function returns the same value calculated with the error
correction function. The two functions were then compared
to identify the goodness of this function.
Table 3: Extract of the sampling on a ”cell phone” object
where the distance value was calculated with the interpola-
tion grade 2 function compared with error correction func-
tion.
Date Object Detected Distance Pixel Distance Sensor (cm) Interpolation Grade 2 ERROR Correction
19:10:51 cell phone: 67% 16 19 19,2223712 18,95365633
19:10:51 cell phone: 68% 16 19 19,2223712 18,95365633
19:10:51 cell phone: 68% 13 19 19,1532398 18,85685519
19:10:51 cell phone: 68% 16 18 19,2223712 18,95365633
19:10:52 cell phone: 68% 19 19 19,3007042 19,06283251
19:10:52 cell phone: 69% 22 20 19,3882388 19,18419679
19:10:52 cell phone: 69% 28 20 19,5909128 19,46264390
19:10:52 cell phone: 71% 35 20 19,8738850 19,84552877
19:10:52 cell phone: 73% 35 21 19,8738850 19,84552877
19:10:53 cell phone: 73% 38 20 20,0104948 20,02795981
19:10:53 cell phone: 73% 38 21 20,0104948 20,02795981
19:10:53 cell phone: 71% 38 20 20,0104948 20,02795981
19:10:53 cell phone: 73% 38 20 20,0104948 20,02795981
19:10:53 cell phone: 73% 40 20 20,1066800 20,15547724
19:10:54 cell phone: 73% 38 20 20,0104948 20,02795981
19:10:54 cell phone: 73% 38 20 20,0104948 20,02795981
19:10:54 cell phone: 71% 37 21 19,9639358 19,96595892
all the recognized objects inside the scene. It needs
different interpolation functions, one for each object
inside the scene of the vehicular environment. This
condition does not permit to have a generalized inter-
polation function able to be utilized on every object in
front the vehicle. So, in order to have a good grade of
accuracy different interpolation functions have to be
identified for each different type of recognized object
inside the vehicular scenario making the approach no
scalable and no efficient to be used in real environ-
ment. A generalized approach is being under study
using different techniques based on machine learning
in order to individuate a generalized approach to be
used in each context.
5 CONCLUSIONS
In this paper we introduce the use of a technique
based on interpolation function for predicting the dis-
tance of objects in front the car equipped with a high
resolution camera. The conducted experiments have
shown the capability of computing correctly this dis-
SIMULTECH 2022 - 12th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
354

tance through the use of on-board camera and how to
predict it using of an interpolation technique. The re-
sults show that the proposed approach is able to guar-
antee a good computing. For the future, it is very in-
teresting to be able of finding a generalized model that
could guarantee and efficient distance estimation for
each object inside the scene. So, for this purpose we
are studying technique based on neural network ap-
proaches that promise to be more precise and reliable
and capable of guaranteeing a generalized model able
to predict object distance for different type of obsta-
cles.
REFERENCES
(2022). Automotive. https://novatel.com/industries/
autonomous-vehicles. [Online; accessed 02-March-
2022].
Aswini, N. and Uma, S. (2019). Obstacle avoidance and dis-
tance measurement for unmanned aerial vehicles us-
ing monocular vision. International Journal of Elec-
trical and Computer Engineering, 9(5):3504.
De Rango, F., Palmieri, N., Yang, X.-S., and Marano, S.
(2018). Swarm robotics in wireless distributed proto-
col design for coordinating robots involved in cooper-
ative tasks. Soft Computing, 22(13):4251–4266.
De Rango, F., Tropea, M., Raimondo, P., and Santamaria,
A. F. (2020). Grey wolf optimization in vanet to man-
age platooning of future autonomous electrical vehi-
cles. In 2020 IEEE 17th Annual Consumer Commu-
nications & Networking Conference (CCNC), pages
1–2. IEEE.
De Rango, F., Tropea, M., Serianni, A., and Cordeschi, N.
(2022). Fuzzy inference system design for promoting
an eco-friendly driving style in iov domain. Vehicular
Communications, 34:100415.
Duan, X., Jiang, H., Tian, D., Zou, T., Zhou, J., and Cao,
Y. (2021). V2i based environment perception for au-
tonomous vehicles at intersections. China Communi-
cations, 18(7):1–12.
Duarte, F. and Ratti, C. (2018). The impact of autonomous
vehicles on cities: A review. Journal of Urban Tech-
nology, 25(4):3–18.
El-Hassan, F. T. (2020). Experimenting with sensors of a
low-cost prototype of an autonomous vehicle. IEEE
Sensors Journal, 20(21):13131–13138.
Fazio, P., Sottile, C., Santamaria, A. F., and Tropea,
M. (2013). Vehicular networking enhancement and
multi-channel routing optimization, based on multi-
objective metric and minimum spanning tree. Ad-
vances in Electrical and Electronic Engineering,
11(5):349–356.
Fazio, P., Tropea, M., Sottile, C., and Lupia, A. (2015).
Vehicular networking and channel modeling: a new
markovian approach. In 2015 12th Annual IEEE Con-
sumer Communications and Networking Conference
(CCNC), pages 702–707. IEEE.
Jim
´
enez, F., Clavijo, M., Castellanos, F., and
´
Alvarez, C.
(2018). Accurate and detailed transversal road section
characteristics extraction using laser scanner. Applied
Sciences, 8(5):724.
Kim, M.-J., Yu, S.-H., Kim, T.-H., Kim, J.-U., and Kim, Y.-
M. (2021). On the development of autonomous vehi-
cle safety distance by an rss model based on a variable
focus function camera. Sensors, 21(20):6733.
Lu, H., Liu, Q., Tian, D., Li, Y., Kim, H., and Serikawa,
S. (2019). The cognitive internet of vehicles for au-
tonomous driving. IEEE Network, 33(3):65–73.
Mariani, S., Cabri, G., and Zambonelli, F. (2021). Coordi-
nation of autonomous vehicles: taxonomy and survey.
ACM Computing Surveys (CSUR), 54(1):1–33.
Palmieri, N., Yang, X.-S., De Rango, F., and Marano, S.
(2019). Comparison of bio-inspired algorithms ap-
plied to the coordination of mobile robots consider-
ing the energy consumption. Neural Computing and
Applications, 31(1):263–286.
Palmieri, N., Yang, X.-S., De Rango, F., and Santamaria,
A. F. (2018). Self-adaptive decision-making mecha-
nisms to balance the execution of multiple tasks for a
multi-robots team. Neurocomputing, 306:17–36.
Park, J. and Choi, B. W. (2019). Design and implementa-
tion procedure for an advanced driver assistance sys-
tem based on an open source autosar. Electronics,
8(9):1025.
Philip, B. V., Alpcan, T., Jin, J., and Palaniswami, M.
(2018). Distributed real-time iot for autonomous ve-
hicles. IEEE Transactions on Industrial Informatics,
15(2):1131–1140.
Salman, Y. D., Ku-Mahamud, K. R., and Kamioka, E.
(2017). Distance measurement for self-driving cars
using stereo camera. In International Conference on
Computing and Informatics, volume 1, pages 235–
242.
Santamaria, A. F., Fazio, P., Raimondo, P., Tropea, M.,
and De Rango, F. (2019a). A new distributed pre-
dictive congestion aware re-routing algorithm for co
2 emissions reduction. IEEE Transactions on Vehicu-
lar Technology, 68(5):4419–4433.
Santamaria, A. F., Raimondo, P., Tropea, M., De Rango,
F., and Aiello, C. (2019b). An iot surveillance sys-
tem based on a decentralised architecture. Sensors,
19(6):1469.
Shashua, A., Shalev-Shwartz, S., and Shammah, S. (2018).
Implementing the rss model on nhtsa pre-crash sce-
narios. Techical Report, Mobileye: Jerusalem, Israel.
Talavera, E., D
´
ıaz-
´
Alvarez, A., Naranjo, J. E., and Olaverri-
Monreal, C. (2021). Autonomous vehicles technolog-
ical trends.
Tropea, M., De Rango, F., Nevigato, N., Bitonti, L., and
Pupo, F. (2021). Scare: A novel switching and col-
lision avoidance process for connected vehicles using
virtualization and edge computing paradigm. Sensors,
21(11):3638.
Wang, C., Wang, X., Hu, H., Liang, Y., and Shen, G. (2022).
On the application of cameras used in autonomous ve-
hicles. Archives of Computational Methods in Engi-
neering, pages 1–21.
A Computer Vision Approach to Predict Distance in an Autonomous Vehicle Environment
355
