
Sitar: A Cycle-based Discrete-Event Simulation Framework for
Architecture Exploration
Neha Karanjkar
1 a
and Madhav Desai
2
1
Indian Institute of Technology Goa, India
2
Indian Institute of Technology Bombay, India
Keywords:
Simulation Framework, Discrete-Event, Cycle-based, Open-source, Parallel, C++.
Abstract:
Sitar is an open-source framework for modeling discrete-event, discrete-time systems. It consists of a modeling
language and a lightweight simulation kernel. Sitar is specifically targeted for architecture-level modeling and
fast simulation of computer systems, though it can be used for other kinds of discrete-time systems as-well.
The modeling language allows the description of a system’s structure as an interconnection of hierarchical,
concurrent entities. The behavior of each entity can be described in an imperative manner using constructs such
as time-delays, conditional wait statements, fork-join concurrency and loops. C++ code can be embedded
directly into the description in a well-defined manner, allowing the modeler to use the flexibility and object-
oriented features of C++. A model written in this language gets translated to C++ code, which can in-turn be
compiled with the simulation kernel to obtain a single simulation executable, or can be linked with external
libraries for co-simulation. The simulation kernel uses a two-phase, cycle-based execution algorithm, and
has been parallelized using OpenMP for fast and scalable simulation on modern multi-core systems. The
framework provides several features to ease the modeling effort, such as in-built logging, syntax highlighting
and systematic error reporting for the Sitar language. In this paper, we describe the design and architecture of
Sitar, and briefly discuss our experience with its use for multi-core design exploration studies.
1 INTRODUCTION
Simulation plays a key role in system-level design ex-
ploration and optimization of modern computer sys-
tems. The systems to be modeled are often very large
and complex, and therefore initial design exploration
makes use of models written at a high level of ab-
straction. Creating such models necessitates frame-
works that can support fast, efficient and scalable sim-
ulations, while also being expressive enough to ease
modeling and debugging effort.
Most simulators used in computer architecture re-
search provide the user parametrized models of com-
ponents such as processors, caches, and interconnects
built directly using a high-level programming lan-
guage such as C/C++ or Java (Akram and Sawalha,
2019). Although these programming languages allow
modular descriptions, they have no built-in features
for describing system structure (as an interconnection
of concurrent entities) or the behavior of entities with
respect to simulation time. Therefore such simulators
a
https://orcid.org/0000-0003-3111-1435
bundle together the model description along with cus-
tom code for advancement of simulation time.
When the focus is on creating new models rather
than using pre-existing configurable models provided
by simulators, discrete-event modeling frameworks
may be used. Discrete-event frameworks can be
broadly divided into Event-Driven and Cycle-based
(also known as Time-stepped) based on the simula-
tion approach. An event-driven approach requires the
use of a global Event Queue (often implemented as
a Priority queue data structure) for keeping track of
dynamically scheduled events, sorted by their time-
stamp. Time advancement is performed by directly
updating the simulation time variable to the time-
stamp of the earliest scheduled, unprocessed event
in the queue. All events scheduled at this time are
processed one-by-one. Actions or state-updates to be
triggered by the occurrence of an event are executed
using callbacks. On the other hand, a cycle-based ap-
proach assumes that all activities in the system oc-
cur only at integer multiples of some fixed time unit.
Time advancement occurs in fixed-size steps. At each
time-step, active entities/processes may be executed
142
Karanjkar, N. and Desai, M.
Sitar: A Cycle-based Discrete-Event Simulation Framework for Architecture Exploration.
DOI: 10.5220/0011320000003274
In Proceedings of the 12th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2022), pages 142-150
ISBN: 978-989-758-578-4; ISSN: 2184-2841
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

to update model state. Cycle-based simulation is par-
ticularly suited to systems that naturally have a fixed
time-step (such as clocked digital systems, discrete-
time queues and computer networks).
An event-driven approach may be more efficient
for simulating systems where the frequency of activi-
ties vary widely over time or across components in the
system. However it is fundamentally difficult to paral-
lelize the event-driven simulation algorithm, although
there exists a large body of research in this direction
(Fujimoto, 1990). This is because the event queue
either needs to be shared across multiple parallel pro-
cesses/threads, or divided in a coherent manner. The
difficulty also arises because the time increments are
dynamically computed and are not known up-front.
VHDL, Verilog and SystemC (OSCI, 2021) are
some examples of discrete-event frameworks that al-
low modeling of system structure and behavior of
concurrent entities with respect to simulation time.
While VHDL and Verilog are meant for detailed
hardware-level modeling, SystemC has been used
for hardware-level, Register-Transfer-Level(RTL) as-
well-as system-level simulations (Fummi et al., 2008)
and is designed to support incremental transition from
abstract descriptions to detailed hardware-level mod-
els.
For building purely architecture-level models of
large clocked systems for rapid design exploration,
SystemC may not be the best choice. This is be-
cause SystemC uses an event-driven simulation ap-
proach which is fundamentally difficult to parallelize.
SystemC was intended to also support hardware-level
modeling and provides constructs such as signals. (A
signal is essentially a state variable which when up-
dated, can automatically trigger activity in other com-
ponents that are sensitive to the signal.) Although
parallelization of SystemC simulations using paral-
lel discrete-event (PDES) algorithms has been ex-
plored (D
¨
omer et al., 2012) the achievable speedup is
low for most benchmarks. General-purpose discrete-
event simulation frameworks such as SimPY (SimPY,
2021) typically do not provide any special constructs
for modeling system structure and use event-driven
approach since their primary focus is on model-
ing flexibility. A cycle-based simulation approach
can be easier to parallelize and is often well-suited
for architecture-level modeling of clocked-systems.
Cycle-based simulation has been used in libraries
such as Cascade (Grossman et al., 2013) and Sys-
temCASS(Buchmann and Greiner, 2007), which is a
cycle-accurate variant of the SystemC kernel.
This paper describes Sitar - a framework for mod-
eling discrete-event, discrete-time systems. It con-
sists of a modeling language and a cycle-based sim-
ulation kernel. The design of Sitar is driven by the
goal of supporting fast, scalable and parallel simu-
lation, while also being expressive enough to ease
modeling and validation effort. Its key design feature
is a two-phase, cycle-based simulation algorithm
which makes the simulation efficient and easy to par-
allelize.
Sitar has been in development since 2013. It
was initially developed as an internal tool, specif-
ically targeted for creating architecture-level mod-
els of Multi-core systems for design exploration.
Subsequently the design and simulation kernel were
improved and simplified, retaining the most useful
features to create Sitar Version 2.0 which is avail-
able as open-source under an MIT licence. The
online repository is present at the following url:
https://nehakaranjkar.github.io/sitar/.
The main focus of this paper is on presenting the
design and architecture of Sitar, along with its ratio-
nale. We first summarize the differentiating aspects
of Sitar in the following paragraphs. In Section 2, we
present an overview of Sitar, describe its underlying
execution model and discuss the parallel simulation
strategy. In Section 3 we present an overview of the
Sitar modeling language, using illustrative examples.
The framework has been used for creating a detailed
cycle-accurate model of a multi-core system for de-
sign exploration studies. In Section 4 we describe our
experience and the performance and scalability ob-
served for this use case. We present a summary and
discuss future work and conclusions in Section 5.
1.1 Related Work
The differentiating aspects of Sitar in the context of
other cycle-based simulation frameworks are summa-
rized below:
• Sitar uses a two-phase cycle-based execution
model (described in detail in the next section)
which makes it possible to execute components of
the model in parallel, in a deterministic way.
Parallel execution is non-trivial because the exact
order in which the individual components in the
model are executed can affect the results, leading
to a race condition. In frameworks such as Cas-
cade (Grossman et al., 2013) and SystemCASS
(Buchmann and Greiner, 2007), deterministic ex-
ecution is achieved by first building a static de-
pendency graph between the components. The be-
havior of components in each cycle is executed in
this statically-computed order. If there are loops
in this dependency graph, the components within
the loop are executed multiple times until conver-
gence.
Sitar: A Cycle-based Discrete-Event Simulation Framework for Architecture Exploration
143

This is not the approach used in Sitar. In Sitar,
each cycle is divided into two phases. Individual
components (modules) are allowed to perform in-
put and state-update actions in the first phase, and
output actions exclusively in the second phase.
Parallel execution is performed simply by map-
ping these components to separate threads, which
synchronize at the end of every phase. Conse-
quently, the order of execution among individual
threads does not affect the results. A similar two-
phase approach has been reported in the Hornet
Multi-core simulator (Ren et al., 2012). How-
ever, Hornet is not a modeling framework. Rather,
it is a specific configurable model of a multicore
system. Sitar is a framework and a language for
modeling cycle-based systems and can be used for
modeling any kind of discrete-time system.
• Another important aspect that differentiates Sitar
from frameworks such as SystemC is that Sitar
provides a rich, custom modeling language. De-
scriptions in this language can be translated au-
tomatically to more verbose C++ code. In con-
trast, SystemC is a C++ library. Constructs such
as time-delays are to be expressed in SystemC us-
ing macros. This often leads to verbose model
descriptions that may be difficult to maintain or
debug. The utility and conciseness of the model-
ing language is illustrated by examples in Section
3.
2 ARCHITECTURE
2.1 Overview
The Sitar framework consists of a modeling language
and a lightweight, cycle-based simulation kernel. A
system in Sitar can be described as a set of modules
(which are behavioral entities or active processes in
the system) communicating over channels called nets.
All modules are assumed to run concurrently on a
global clock. The language provides a means for de-
scribing the system structure (as an interconnection of
modules) in a hierarchical and modular way. The be-
havior of each module can be described in an impera-
tive manner as a sequence of statements. The state-
ments include conditional and unconditional time-
delays, branch and loop constructs, parallel blocks
and instantaneous code blocks. In addition, C++
code can be embedded into a module description in
a straightforward and well-defined manner. Descrip-
tions written in this language get translated to C++
code and can be compiled to get a simulation exe-
cutable. Listing 1 shows a simple example and its
//A hello−world example
module Top
behavior
$ log<<endl<<"Hello World!"; $;
wait(2,0); //wait 2 clock cycles
$ log<<endl<<"Hello again!"; $;
wait(3,0); //wait 3 clock cycles
$ log<<endl<<"Bye!"; $;
stop simulation;
end behavior
end module
//Output:
//
// (0,0)TOP :Hello World!
// (2,0)TOP :Hello again!
// (5,0)TOP :Bye!
// simulation stopped at time (5,0)
Listing 1: A Hello-World Example.
simulation output. The Sitar language parser/transla-
tor has been built using Antlr V3 (Parr, 2009). It trans-
lates each module description into a C++ class. The
generated classes inherit methods from the simulation
kernel to allow execution of their behavior. They can
be compiled along with the simulation kernel code to
obtain a single simulation executable, or linked to ex-
ternal models (such as processor front-ends) for co-
simulation using direct function calls or through inter-
process communication.
The Sitar framework includes systematic support
for logging. The logging mechanism is implemented
using C++’s std::ostream library. Individual mod-
ules can send their logs to a common stream or sepa-
rate streams. A module instance’s hierarchical name
and the time-stamp are prefixed automatically to each
log message. The logging can be enabled/disabled
at compile-time or run-time, and the framework also
provides fine-grained control to enable/disable log-
ging for specific modules during simulation. This fea-
ture is quite useful when debugging very large sys-
tems or long simulations. By enabling logging for
only specific modules in the system under specific
conditions, it is possible to generate a focussed ac-
tivity trace without having to change the model code.
The simulation kernel is cycle-based and uses
a two-phase execution algorithm for deterministic
simulation. It has been parallelized using OpenMP
for fast simulation on shared-memory multi-core sys-
tems. Individual modules or a group of modules can
be mapped to separate OpenMP threads that synchro-
nize at fixed time-steps. The execution model and
parallelization are described in detail in the following
paragraphs.
2.2 Execution Model
The basic components in a Sitar system are modules
and nets. Modules are behavioral entities in the sys-
SIMULTECH 2022 - 12th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
144

tem and nets are channels of communication between
them. All modules run concurrently on a single clock.
A module can communicate with another module via
transfer of data tokens (which are packets of informa-
tion) over a net connecting the two modules. Each net
provides a fixed amount of FIFO buffering for data
tokens. Nets are passive components, and their state
can change only upon input or output actions by mod-
ules. A module’s interface to a net is called a port. A
port can either be an inport or an outport. Each net
is connected to exactly one inport and one outport.
Modules can be hierarchical, containing instances of
other modules. The system description must contain
a single module named Top which represents the top-
level module in the hierarchy to be instantiated for
simulation. Modules can optionally have a behavior
block which describes the behavior of the model over
time. Figure 1 illustrates a system with four modules
contained inside the Top module.
A
B
C
tokens
outport inport
net
D
Top
module
Figure 1: Example of a system in Sitar.
Simulation is cycle-based and uses a two-phase exe-
cution algorithm. In this algorithm, each clock cycle
is divided into two phases : phase 0 and phase 1. A
module is allowed to input tokens from a net in phase
0 only, and output tokens to a net in phase 1 only.
Thus the state-updates to a net occur in a race free (de-
terministic) manner. This restriction leads to a simple
simulation algorithm that is easy to parallelize. In this
simulation algorithm, in each phase, the behavior of
each module in the system is executed exactly once,
as follows:
cycle = 0
while (cycle < total_simulation_cycles)
{
phase=0
for each module m :
m.execute_behavior(cycle,phase)
phase=1
for each module m :
m.execute_behavior(cycle,phase)
cycle=cycle+1
}
The two phase approach avoids race conditions in
simulation as the result does not depend on the or-
der of execution among modules. This is the key for
enabling straightforward parallelization. To perform
parallel simulation, the set of modules may be divided
and mapped to different threads running concurrently
and synchronizing at the end of each phase. It is
important that between any pair of modules that are
mapped to separate threads, the communication must
occur solely via nets, and not through other shared
variables in an ad-hoc manner. Updating the state of a
net by input/output from modules need not be placed
within a critical section, as the algorithm guarantees
that at-most one module will update the net in a single
phase.
As a consequence of the two-phase execution, the
propagation of information from one module to an-
other over a net incurs a delay of at-least one clock
cycle. This is similar to the communicating Moore-
machines paradigm. If there are cycles in the struc-
ture (for example, the loop via modules A, B and C
in Figure 1), and if the restriction of 1-cycle delay
is not applied, events can propagate from input of a
module, to its output, and back to its input instan-
taneously, requiring multiple executions of module
behavior within a cycle until convergence, or neces-
sitating building a dependency graph and executing
module behavior in the order of dependency. (The
later approach is in-fact used by the Cascade frame-
work (Grossman et al., 2013).) The two-phase restric-
tion imposed by Sitar leads to an efficient, easy-to-
parallelize simulation.
Instantaneous communication or instantaneous
dependency loops between concurrent components in
the system can be modeled by placing these concur-
rent components within a single module as parallel
branches of a fork-join construct. The modeling lan-
guage supports this via procedures and parallel
constructs as described in Section 3 (see Listings 4
and 5 as examples). These concurrent branches can
be executed multiple times until convergence within a
single module. The execution order of individual par-
allel components within a module’s behavior block is
fixed (determined by the order of component declara-
tions in the model), and thus cannot lead to race con-
ditions.
The simulation kernel has been parallelized using
OpenMP. The division of the set of modules and their
mapping to OpenMP simulation threads can be dy-
namically determined using OpenMP’s default sched-
uler or statically specified by the modeler for a bal-
anced work-division.
Sitar: A Cycle-based Discrete-Event Simulation Framework for Architecture Exploration
145

3 MODELING LANGUAGE
In this section, we present an overview of the Sitar
modeling language using illustrative examples. The
language is case-sensitive, and supports embedding
of C++ code at several places in a well-defined man-
ner. The basic design units in a sitar description are
modules and procedures. Modules are the basic struc-
tural entities that can be instantiated independently.
A module can be hierarchical (containing instances
of other modules) and can optionally also have a be-
havior block, describing its behavior with time as a
sequence of statements. A procedure describes a se-
quence of actions that can be invoked from within the
behavior block of a module or from within another
procedure (nesting of procedures is allowed). This
construct is meant for making behavior descriptions
modular and reusable. A design unit can be defined
once and instantiated multiple times.
3.1 Describing System Structure
The modeling language supports description of sys-
tem structure (interconnection and hierarchy of mod-
ules) and attributes such as capacities of nets and
widths of ports (to model communication bandwidth).
A module can contain instances of other modules,
declared using the submodule keyword. Module
descriptions can be parameterized, and multiple in-
stances can be created with different parameter val-
ues. Generation of regular structures such as arrays
of modules and nets and their connections in a regu-
lar pattern is supported via generate constructs. This
is similar to, and inspired from the generics and
generate constructs in VHDL language. These as-
pects are illustrated by an example of a Shift-Register
model in Listing 2 where the number of stages and
delay of each stage are parameterized.
3.2 Describing Module Behavior
The behavior of a module can be described within
a behavior block as a sequence or statements sep-
arated by semicolons. The statements execute one by
one and can be of two types:
• Atomic Statements: These can be C++ code
snippets, wait(duration), conditional wait
until (condition) or simulation control state-
ments that are used for stopping the simulation of
a particular module or the entire system upon cer-
tain conditions.
• Compound Statements: are statements that can
in-turn contain a nested sequence of any state-
ments. Examples of compound statements are
// The system consists of a Producer and a Consumer
// connected via a ShiftRegister. The number of stages and
// delay of each stage of the ShiftRegister are parameters.
module Top
//Instantiate a shift register
//with 3 stages, and a per−stage delay of 1
submodule S : ShiftRegister<3,1>
//Instantiate the Producer and Consumer
submodule P : Producer
submodule C : Consumer
//Connect the Producer and Consumer
//to the two ends of the ShiftRegister
P.out port => S.n[0]
C.in port <= S.n[3]
end module
module ShiftRegister
//declare module parameters
//and their default values
parameter int N = 1 //number of stages
parameter int DELAY = 1 //delay of each stage
//The ShiftRegister consists of N stages
submodule array stage[N] : Stage<DELAY>
//N+1 nets to connect all stages
net array n[N+1] : capacity 1
//connect the stages via nets
for i in 0 to (N − 1)
stage[i].in port <= n[i]
stage[i].out port => n[i+1]
end for
end module
module Stage
parameter int DELAY = 1
inport in port
outport out port
behavior
// describe the behavior of each stage
//...
end behavior
end module
Listing 2: A Shift Register model in Sitar.
do-while loops, if-else statement, parallel
blocks and procedures.
Listing 3 shows examples of some of these statements
used inside a behavior block. C++ code snippets de-
limited by dollar $ characters can be used for embed-
ding C++ code into a description. The embedded code
gets pasted as-is in the generated C++ classes at vari-
ous locations. Inside a behavior block, it can be used
as an atomic statement or an expression. Code snip-
pets prefixed by incl, decl and init can be used to
add code to the header section, declarations region in
the class body or the class constructor of a module
respectively.
Parallel Block Statements: are used for model-
ing fork-join concurrency within a module. A parallel
block is a compound statement containing nested se-
quences (separated by || symbols) that are concur-
SIMULTECH 2022 - 12th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
146

//An example showing atomic and compound statements
module Top
behavior
//Declare a variable. This becomes a data member
decl $int x;$;
//This goes into the constructor
init $x=0;$;
//An atomic statement to read user−input
$ std::cout<<"\nEnter a number:";
std::cin>>x;$;
//An if−else statement containing
//nested do−while and other statements
if($x%2==0$) then
//Enter this branch if x is even
//Print the time in every phase
//until time exceeds 3.
do
wait(0,1); //wait for one phase
$std::cout<<"\nTIME="<<current_time;$;
while($current_time<=time(3,0)$) end do;
stop simulation;
else
//Enter this branch if x is odd
//stop simulation after 2 cycles
wait (2,0);
stop simulation;
end if;
end behavior
end module
// Output:
// Enter a number:4
//
// TIME=(0,1)
// TIME=(1,0)
// TIME=(1,1)
// TIME=(2,0)
// TIME=(2,1)
// TIME=(3,0)
// TIME=(3,1)
// simulation stopped at time (3,1)
Listing 3: An example showing Atomic and Compound
statements in Sitar.
rently active. Listing 4 shows an example and its
output. As shown in this example, there can be de-
pendencies between the branches of a parallel block.
In the implementation, each branch may be executed
multiple times in a single phase until convergence.
The entire parallel block terminates once all of the
constituent sequences terminate or until a stop state-
ment is encountered. Procedures are a useful feature
in Sitar meant for modular description. A Procedure
encapsulate a sequence of statements that need to be
invoked multiple times or at multiple locations in a
description. They can have local variables and pa-
rameters, similar to a module. A procedure defini-
tion also gets translated to C++ class. An instance of
this class becomes a data member of the module in-
voking it. An example is shown in Listing 5. Other
features such as the use of data-tokens, logging con-
trol and simulation control statements are described
with examples in the user manual available inside the
//An example showing Parallel block statement
module Top
behavior
decl $bool x;$;
init $x=false;$;
wait(1,0);
[
//This is the first branch
wait (2,0);
do
$x=true;$; //Set x
$log<<endl<<"In branch A, set x";$;
wait until($x==false$);
while(1) end do;
||
//This is the second branch
do
wait until($x==true$);
wait(1,0);
$x=false;$; //Reset x
$log<<endl<<"In branch B, reset x";$;
while(1) end do;
||
//This is the third branch
wait(4,0);
stop simulation;
];
end behavior
end module
// Output:
//
// (3,0)TOP :In branch A, set x
// (4,0)TOP :In branch B, reset x
// (4,0)TOP :In branch A, set x
// (5,0)TOP :In branch B, reset x
// (5,0)TOP :In branch A, set x
// simulation stopped at time (5,0)
Listing 4: A Parallel block statement.
online repository (Karanjkar and Desai, 2022). The
repository also includes a syntax specification for the
language and Syntax highlighting support for the Vim
text editor tool.
4 USE-CASE
In this section we discuss a particular use-case of Sitar
and describe the modeling experience and simulation
performance/speedup obtained.
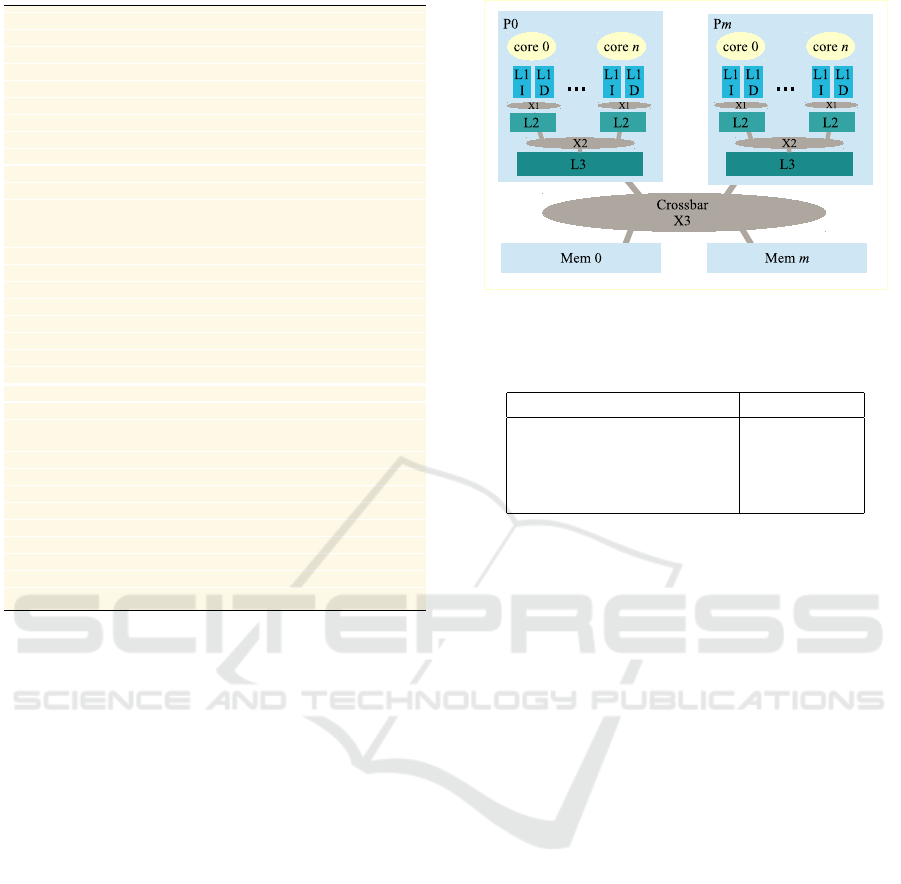
System Model: The Sitar framework was used for
creating a cycle-accurate, parameterized model of a
Multi-core system for design exploration studies. The
system is illustrated in Figure 2. It consists of m pro-
cessors, with n cores per-processor (where m and n are
model parameters). The processors are connected to
m memory modules, forming an m-way Non-Uniform
Memory Access (NUMA) configuration. Each core
implements the Sparc V8 instruction set. The cache
subsystem comprises per-core split L1 I/D caches, a
per-core unified L2 cache, and a shared L3 cache. Co-
herency is maintained using a hierarchical directory-
Sitar: A Cycle-based Discrete-Event Simulation Framework for Architecture Exploration
147
//Definition of a procedure
//that performs some action periodically
procedure MyProcedure
parameter int PERIOD=1
behavior
do
wait(PERIOD,0);
$cout<<"\nTIME="<<current_time;$;
$cout<<"in Procedure "<<instanceId();$;
while(1) end do;
end behavior
end procedure
module Top
//Create two instances of the
//Procedure with different periods
procedure p1 : MyProcedure<1>
procedure p2 : MyProcedure<2>
behavior
//run p1 and p2 in parallel,
//stop simulation after 5 cycles.
[run p1 || run p2 || wait(5,0); stop simulation;]
end behavior
end module
// Output:
// TIME=(1,0)in Procedure p1
// TIME=(2,0)in Procedure p1
// TIME=(2,0)in Procedure p2
// TIME=(3,0)in Procedure p1
// TIME=(4,0)in Procedure p1
// TIME=(4,0)in Procedure p2
// TIME=(5,0)in Procedure p1
// simulation stopped at time (5,0)
Listing 5: A Procedure block.
based MESI protocol. Interconnect between succes-
sive levels in the memory hierarchy is a full-crossbar
(labeled X in Figure 2) with parametrized link delays.
Architectural components in the memory subsys-
tem (such as caches, memory modules and intercon-
nect switches) are modeled at the functional as well
as cycle-accurate timing levels. Thus, the timing of
loads/stores and coherence requests flowing through
the memory subsystem is modeled in detail. The
cores are in-order and all instructions other than load-
s/stores are assumed to execute in one cycle. The
model can run binaries compiled for Sparc V8. In
the implementation, the purely functional aspects of
the model (such as the instruction decoder, the co-
herence protocol etc) are described as C++ classes.
This code is imported into the Sitar module descrip-
tion of components such as cores and caches to cre-
ate a cycle-accurate model. The modeling language
features such as generate statements, parameters
and procedures were found to be highly useful in
making the description modular and configurable.
The number of cores, cache configurations and the
delay parameters in every module can be config-
ured at the time of instantiation. Each module de-
scription is instrumented with detailed logging state-
ments. The Logging can be selectively enabled/dis-
Figure 2: Multi-core system modeled using Sitar.
Table 1: NAS benchmark kernels used as workload and
their problem sizes.
Kernel Problem Size
Embarrassingly Parallel (EP) 2
16
Multigrid (MG) 16
3
3-D FFT PDE solver (FT) 32
3
Integer Sort (IS) 2
14
+ 2
12
abled for specific modules, supporting focussed de-
bugging. The model has been validated thoroughly
using unit tests for individual components and shared-
memory benchmarks for the whole model. For all
simulations results discussed in the following para-
graphs, the number of processors in the model(m) and
the number of cores per-processor(n) are set to 2 and
4 respectively, to model an 8-core system.
Workload: Four kernels from the NAS parallel
benchmark suite (NPB)(Bailey et al., 1991) are used
as workload running on the 8-core model. The kernels
and their problem sizes are listed in Table 1. Each ker-
nel is 1 to 2 million instructions long.
Host Configuration: Simulations were performed on
a 3.3 GHz Intel machine with 4 physical cores, run-
ning Linux (Ubuntu 18.04). The real time for simu-
lating the execution of the complete benchmark kernel
on the 8-core model was measured for parallel simu-
lations using 1,2 and 4 OpenMP threads to measure
the speedup.
Speedup and Performance: Table 2 summarizes
the performance and the speedup obtained for each
of the benchmark workloads. The results indicate
that a decent speedup is possible with minimal addi-
tional modeler effort for parallelizing the simulations.
A more detailed scalability evaluation on a many-
core system for benchmark designs is necessary and
planned as future work.
SIMULTECH 2022 - 12th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
148

Table 2: Simulation time and Speedup obtained for simulat-
ing the execution of NAS benchmark kernels on the multi-
core cycle-accurate simulation model.
Workload
(Sim Cycles)
Simulation time in seconds
and (Speedup)
1 thread 2 threads 4 threads
EP (9781300) 954 (1x) 622 (1.5x) 442 (2.2x)
FT(16578568) 1710 (1x) 1112 (1.5x) 855 (2x)
IS(1434771) 156 (1x) 102 (1.5x) 78 (2x)
MG(13728356) 1452 (1x) 944 (1.5x) 726 (2x)
5 SUMMARY AND
CONCLUSIONS
This paper presented Sitar- an open-source cycle-
based modeling framework. The key design aspects
of Sitar are summarized here:
1. Cycle-base, Two-phase Execution: The two-
phase, cycle-based execution algorithm used by
Sitar makes the simulation deterministic and easy
to parallelize. Sitar differs from other cycle-based
tools such as Cascade as it uses a two-phase sim-
ulation algorithm. The two-phase approach elim-
inates the need for building a static dependency
graph of the components to determine the order
of execution among modules. However, there are
two execution iterations required in every clock
cycle, which may lead to some performance over-
heads.
2. Lightweight Simulation Kernel The two-phase
approach makes the simulation kernel simple and
extremely lightweight in terms of code size. The
kernel comprises about 1000 lines of C++ code,
inclusive of comments. Consequently the trans-
lated model code which inherits from the simula-
tion kernel classes is also small. The kernel has
no external dependencies. The translated code
can be compiled to run on any system that sup-
ports the gcc compiler and OpenMP. The only de-
pendency that Sitar has is in the translation phase
as the translator uses the Antlr V3 library. The
Antlr V3 runtime library is bundled along with the
Sitar distribution and gets installed automatically
by Sitar’s installation scripts. The Sitar transla-
tion and compilation scripts are written for being
run from a Linux terminal, and are well-tested on
Ubuntu 18.04 and Ubuntu 20.04.
3. Domain Specific Modeling Language Frame-
works such as SystemC or Cascade are C++ li-
braries. The modeler invokes the modeling con-
structs via C++ macros defined by the framework.
This may sometimes lead to verbose model de-
scriptions. Sitar consists of a modeling language
that provides several features for easing modeling
effort and may produce more concise and readable
model descriptions. The descriptions get trans-
lated to readable C++ code. The translated code
contains line numbers of the corresponding sitar
source code to help in debugging compilation-
time errors in the embedded C++ code. On the
downside, a new user would need to learn the
modeling language instead of being able to de-
scribe the model solely using a popular program-
ming language like C++ or Python.
4. Fine-grained Logging Support: The built-in
logging support was found to be one of the most
useful features for creating and validation of the
Multi-core model. The modeler can instrument
each module with detailed log statements. During
simulation, it is often desired to view logs from
only certain components or during a certain time
period in a very long simulation. Saving all logs
to a file for later filtering is difficult, as the full log
files can quickly reach an enormous size. Thus
the fine grained logging control provided in Sitar
becomes highly useful for large, complex models.
Logs from different modules can be enabled/dis-
abled as and when needed. The log streams from
each module can be sent to a single file/screen or
can also be redirected to separate files if neces-
sary. Further, all logging can be disabled at com-
pile time if required for a fast simulation in design
exploration experiments.
In this paper, we briefly discussed the perfor-
mance and scalability observed for a particular use
case of multi-core modeling. However, a detailed per-
formance review of Sitar and performance compari-
son with other frameworks such as SystemC is neces-
sary and is planned as future work.
REFERENCES
Akram, A. and Sawalha, L. (2019). A Survey of Computer
Architecture Simulation Techniques and Tools. IEEE
Access, 7:78120–78145.
Bailey, D. H., Barszcz, E., Barton, J. T., Browning, D. S.,
Carter, R. L., Dagum, L., Fatoohi, R. A., Freder-
ickson, P. O., Lasinski, T. A., Schreiber, R. S., Si-
mon, H. D., Venkatakrishnan, V., and Weeratunga,
S. K. (1991). The NAS Parallel Benchmarks Sum-
mary and Preliminary Results. In Proceedings of the
1991 ACM/IEEE Conference on Supercomputing, Su-
percomputing ’91, New York, NY, USA. ACM.
Buchmann, R. and Greiner, A. (2007). A fully static
scheduling approach for fast cycle accurate systemC
Sitar: A Cycle-based Discrete-Event Simulation Framework for Architecture Exploration
149

simulation of MPSoCs. In 2007 Internatonal Confer-
ence on Microelectronics, pages 101–104.
D
¨
omer, R., Chen, W., and Han, X. (2012). Parallel dis-
crete event simulation of transaction level models. In
17th Asia and South Pacific Design Automation Con-
ference, pages 227–231.
Fujimoto, R. M. (1990). Parallel Discrete Event Simulation.
Communications of the ACM, 33(10):30–53.
Fummi, F., Quaglia, D., and Stefanni, F. (2008). A
SystemC-based framework for modeling and simula-
tion of networked embedded systems. In 2008 Forum
on Specification, Verification and Design Languages,
pages 49–54.
Grossman, J., Towles, B., Bank, J. A., and Shaw, D. E.
(2013). The role of Cascade, a cycle-based simulation
infrastructure, in designing the Anton special-purpose
supercomputers. In 2013 50th ACM/EDAC/IEEE De-
sign Automation Conference (DAC), pages 1–9.
Karanjkar, N. and Desai, M. (2022). Sitar:
Online repository and documentation
(https://nehakaranjkar.github.io/sitar/).
OSCI (2021). SystemC - The language for System-level de-
sign, modeling and verification (https://systemc.org/).
Parr, T. (2009). Antlr V3 -ANother Tool for Language
Recognition (http://www.antlr3.org).
Ren, P., Lis, M., Cho, M. H., Shim, K. S., Fletcher, C. W.,
Khan, O., Zheng, N., and Devadas, S. (2012). Hornet:
A cycle-level multicore simulator. IEEE Transactions
on Computer-Aided Design of Integrated Circuits and
Systems, 31(6):890–903.
SimPY, T. (2021). SimPY - Discrete-Event Simulation for
Python (https://simpy.readthedocs.io).
SIMULTECH 2022 - 12th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
150
