
Structural Damage Localization via
Deep Learning and IoT Enabled Digital Twin
Marco Parola
1a
, Federico A. Galatolo
1b
, Matteo Torzoni
2
, Mario G. C. A. Cimino
1c
and Gigliola Vaglini
1d
1
Department of Information Engineering, University of Pisa, Largo L. Lazzarino 1, Pisa, Italy
2
Department of Civil and Environmental Engineering, Politecnico di Milano, Piazza L. da Vinci 32, Milano, Italy
Keywords: Convolutional Neural Network, IoT, Digital Twin, Structural Health Monitoring.
Abstract: Structural Health Monitoring (SHM) of civil structures using IoT sensors is a major emerging challenge. SHM
aims to detect and identify any deviation from a reference condition, typically a damage-free baseline, to keep
track of the relevant structural integrity. Machine Learning (ML) techniques have recently been employed to
empower vibration-based SHM systems. Supervised ML can provide more information than unsupervised
ML, but it requires human intervention to appropriately label data describing the nature of the damage.
However, labelled data related to damage conditions of civil structures are often unavailable. To overcome
this limitation, a key solution is a Digital Twin relying on physics-based numerical models to simulate the
structural response in terms of the vibration recordings provided by IoT devices during the events of interest,
such as wind or seismic excitations. This paper presents such comprehensive approach to address the damage
localization task by exploiting a Convolutional Neural Network (CNN). Early experimental results related to
a pilot application involving a sample structure, show the potential of the proposed approach and the
reusability of the trained system in presence of varying loading scenarios.
1 INTRODUCTION AND
BACKGROUND
All structures, whether buildings, bridges, oil and gas
pipelines, are subject to several external actions and
sources of degradation that might compromise their
structural performance. This can happen due to a
faulty construction process, lack of quality control, or
unexpected loadings, environmental actions and
natural hazards such as earthquakes. In order to
observe the resulting changes in the structure, and to
quickly react before a major damage occurs, it is
crucial to implement an autonomus damage
identification system. Systematic diagnostic and
prognostic activities allow for timely maintenance
and repair actions, with a direct impact on reducing
operating costs. In the last years, increasingly
sophisticated Structural Health Monitoring (SHM)
a
https://orcid.org/0000-0003-4871-4902
b
https://orcid.org/0000-0001-7193-3754
c
https://orcid.org/0000-0002-1031-1959
d
https://orcid.org/0000-0003-1949-6504
systems have been developed. These systems
constantly measure structural responses to load
solicitations and perform different tasks, such as
damage detection, localization, quantification and
estimation of the impact of environmental effects on
the building (Ye, Jin, & Yun, 2019). A SHM
architecture consists of different layers. In the lowest
layer, a sensor network is installed on the structure
and collects vibrational and environmental data. The
upper layers deal with communication and data
storage. In the analysis layer, the algorithms solving
SHM tasks are implemented. Finally, in the highest
layer the results of these computations are displayed
via reports or web platforms.
Recently, many Machine Learning (ML)
vibration-based strategies have been proposed to
solve different SHM problems. SHM systems based
on ML algorithms are increasingly popular because
of their ability to capture damage-sensitive patterns
Parola, M., Galatolo, F., Torzoni, M., Cimino, M. and Vaglini, G.
Structural Damage Localization via Deep Learning and IoT Enabled Digital Twin.
DOI: 10.5220/0011320600003277
In Proceedings of the 3rd International Conference on Deep Learning Theory and Applications (DeLTA 2022), pages 199-206
ISBN: 978-989-758-584-5; ISSN: 2184-9277
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
199

that traditional algorithms often fail to detect (Wang,
2022). In particular, using Supervised Learning (SL),
the ML system models a relationship based on input-
output pairs, whereas Unsupervised Learning (UL)
finds patterns in the input data that are provided
without a corresponding output label. In structural
engineering, a dominant method of UL is the
Frequency Domain Decomposition (FDD), used for
Modal Analysis (MA). Specifically, MA studies the
dynamic properties of the systems in the frequency
domain. MA uses the overall mass and stiffness of a
structure to find the periods at which it naturally
resonates (Rainieri, Fabbrocino, & Cosenza, 2007).
The outputs of MA are frequency response, modal
shapes and damping. FDD consists of two main steps:
(i) frequency detection and (ii) tracking. Frequency
detection is performed periodically by clustering
algorithms, in order to find frequencies that have
occurred since the previous execution. In the tracking
phase, the frequencies found are combined to create
trends describing the overall properties of the
structure and how they change over time (Fabio,
Ferrari, & Rizzi, 2016).
UL methods detect anomalies or drifts in the
inputs, without providing a clear and explicit
explanation. In order to get explicit information such
as damage location, quantification and type, data
enriched with labels and SL methods are adopted
(Wang, 2022). However, dealing with civil structures,
labeled data related to different environmental
conditions or seismic events are often unavailable. To
overcome this limitation, a key solution is a Digital
Twin (DT) reproducing both structural physics-based
numerical models and input vibrations provided by
IoT devices during the events of interest, such as wind
or seismic forces (Aydemir, Zengin, & Durak, 2020).
A DT consists of three components: a physical
structure in the real world, a digital model of the
structure in a computerized environment, and the
integration of data and information that tie the virtual
and real products together (David, Chris, Aydin,
Jason, & Ben, 2020). For a successful DT
implementation, all related assets need to be properly
defined in order to collect the necessary data. Indeed,
since data modeling and simulation have a non-
negligible cost, efficient tools and methods are
needed. The process in which these tools are defined
and the DT is implemented is called digital
transformation. An important method of the digital
representation of the structure based on computerized
tools, is called Finite Element (FE). FE numerically
solves differential equations of structural
1
https://www.movesolutions.it/deck/
engineering. Since the computational cost associated
to the solution of such numerical models can easily
become prohibitive, in view of a systematic
evaluation for dataset generation purposes a Model
Order Reduction (MOR) strategy is adopted to
computationally speed up the construction of the
necessary data (Rosafalco, Torzoni, Manzoni, &
Mariani, 2021). Subsequently, Supervised Deep
Learning (DL) models can be created with the
generated data, to solve specific SHM tasks.
This paper shows the overall methodology and a
pilot application in the field, based on a
Convolutional Neural Network (CNN) performing
the damage localization task on a sample structure.
Early experimental results show the potential of the
proposed approach, as well as the reusability of the
trained system on varying environmental actions.
The paper is structured as follows. Section 2
covers material and methods, whereas experimental
results and discussions are covered by Section 3.
Finally, Section 4 draws conclusions and future work.
2 MATERIALS AND METHODS
The SHM methodology applied in this work consists
of two main parts: (i) the design and implementation
of the DT used as dataset generator to create a dataset
that reflects realistic environmental effects; (ii) the
damage localization problem via a supervised DL
architecture. Finally, an analysis of the performance
of the DL model is presented, considering different
loading conditions (Yuqian, Chao, Kevin, Huiyue, &
Xun, 2020).
2.1 Digital Twin Development
To faithfully represent a real scenario through a DT,
three aspects are considered: (i) physics-based model
of the structure to be monitored, (ii) the digital
reproduction of low-intensity seismic loads, and (iii)
the introduction of noise components affecting the
IoT sensor networks. The representation of the
physical aspects involves the modeling of the
building and the simulation of a sensor system for the
vibrational IoT data acquisition. Let us consider, in
Figure 1, a pilot example of building to monitor. A
commercial example of IoT system is represented in
Figure 2: a Deck – Dynamic Displacement Sensor
1
. It
is a mono-axial wireless device, which acquires
displacements with an accuracy of 0.01 mm, suitable
for dynamic monitoring.
DeLTA 2022 - 3rd International Conference on Deep Learning Theory and Applications
200
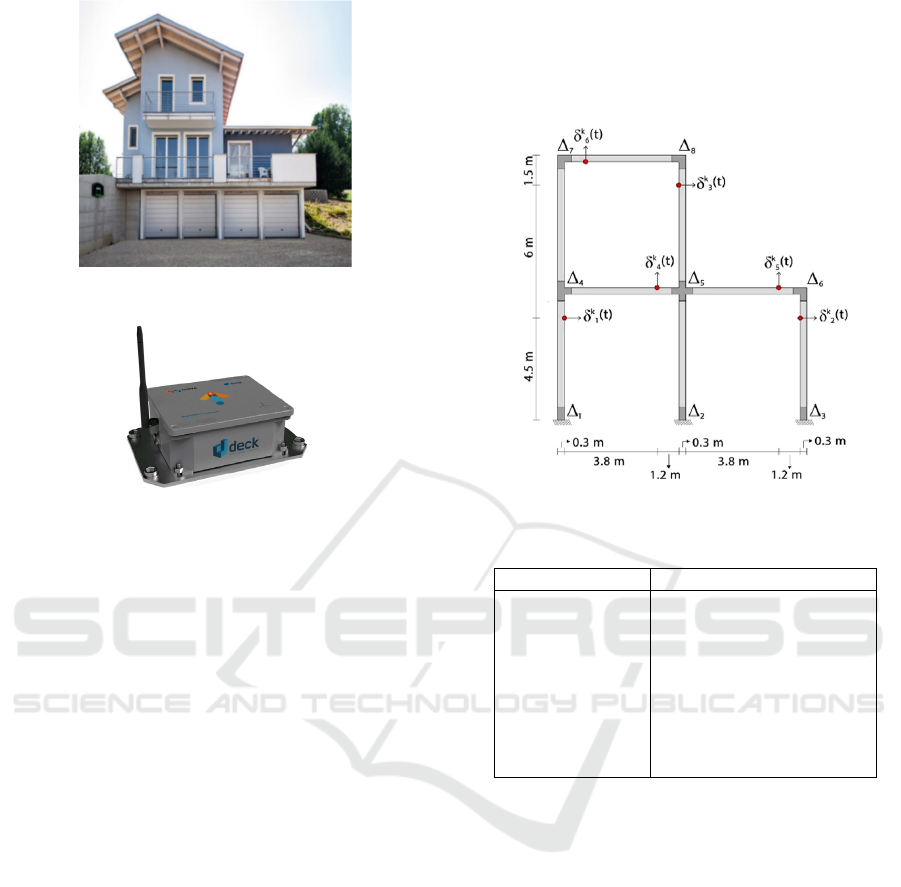
Figure 1: A pilot example of building to monitor.
Figure 2: An example of IoT device: Deck – Dynamic
Displacement Sensor © Move Srl, Italy.
To clearly represent the methodology, a
simplified DT will be illustrated in the following for
the sake of significance. Figure 3 shows a simplified
representation of the DT of the building. Here, the
building is modeled as a two-dimensional (2D) frame,
assuming a plane stress formulation; the geometry has
been discretized in 3450 constant strain triangle finite
elements. In order to reduce the computational burden
of the data generation process, the structural model,
which is based on the FE method, is replaced by a
Reduced-Order Model (ROM) (Torzoni, Rosafalco,
& Manzoni, 2020)
.
Overall, N
s
=6 synchronized
vibrational sensor devices, with sampling rate 25Hz,
have been considered to collect displacements
measurements. Each displacement measure δ
k
(t) has
been prefixed in terms of direction
(vertical/horizontal) and orientation (up/right). The
bottom edges are assumed perfectly clamped to the
ground. The output damage scenarios ∆
i
have been
limited to 9 classes, located on related dark grey areas
in Figure 3, and defined in Table 1. Here, the essential
assumption is the presence of only one damage
location after a seismic event. As a consequence, only
a discrete number N
∆
of damage scenarios are defined
based on mechanical response, loading conditions,
and aging processes. In the DT, damage is modeled
as a localized reduction of stiffness on the selected
regions.
An important aspect concerns the synchronization
between IoT devices, which is a critical requirement
for system operation. Implementing a
synchronization mechanism in a real-world scenario
is not a zero-cost process. Several protocols can be
adopted to guarantee this requirement, depending on
the system type (Yiğitler, Behnam, & Riku, 2020).
Figure 3: A simplified Digital Twin representation.
Table 1: Output damage scenarios.
Damage class Location description
∆
0
Undamaged
∆
1
Ground floor – left
∆
2
Ground floor – mid
∆
3
Ground floor – right
∆
4
1
st
floor - left
∆
5
1
st
floor - mid
∆
6
1
st
floor - right
∆
7
Roof - left
∆
8
Roof - mid
Another important aspect concerns the input
loading condition to which the structure is subject to.
In this work, low intensity seismic loads are
considered; Ground Motion Prediction Equations
(GMPE) adapted from (Paolucci, et al., 2018)
(Sabetta & Pugliese, 1996) have been adopted to
faithfully reproduce this aspect. The main advantage
of GMPE is the ability to generate spectrum-
compatible accelerograms as a function of: local
magnitude Q, epicentral distance R, and site geology.
The following ranges have been considered: Q ∈(4.8,
5.3); R ∈(80, 100) km; rocky conditions. The
parameters
Q
and R have been modelled by uniform
probability density functions.
A vibration record is then generated by evaluating
the model of the structure under the seismic event k.
It consists of displacement measurements δ
k
(t) of
fixed length L=1750, δ
k
(t) ∈
ℝ
L
and refers to a time
period ∆t=70s. An event is detected and recorded by
Structural Damage Localization via Deep Learning and IoT Enabled Digital Twin
201
all N
s
sensors, yielding a seismic event observation
δ
k
i
(t) ∈ℝ
L
⨯
Ns
, i=0,…,N
s.
.
Given an observation δ
k
i
(t) related to a seismic
event k, a damage class Δ
k
∈ℕ is assigned to it,
therefore, a record of our dataset D is defined as a pair
[δ
k
i,
, ∆
k
], i=0,…,N
s
. In Table 1 the N
d
=9 damage
scenarios included the undamaged baseline state,
labeled as d=∆
0
.
A damage level l
k
∈ℝ is also associated with
each event, to represent the intensity of the stiffness
reduction involving the subdomain that is related to
∆
k
; l
k
is sampled by a uniform probability density
function in the range ∈(0.05, 0.25).
The iterative process of simulating the structural
response for varying parameters values is repeated for
N
o
=9999 times D ∈ℝ
L
⨯
Ns
⨯
No
.
2.2 The Seismic Events Dataset
The influence of a generic signal δ
(.)
on a system can
be measured by computing its power
(.)
as shown
in Equation (1). Different components have been
considered to model the various aspects influencing
the sensed data, such as traffic, temperature, pressure,
rain, wind, and so on. (Joaquín, Ana, Jesús, &
Fernando, 2015). All these components contribute to
produce the environmental phenomena that affect the
behaviour of the structure.
To measure the quantity of all components in the
signal, a metric has been defined, i.e., the
Environmental Condition (EC). EC is defined as the
ratio of the power of a seismic signal
and the
power of environmental noise
. In order to avoid
large values to skew the plot, a logarithmic scale has
been applied, computing the EC metric in decibels as
shown in Equation (2). An EC higher than 1 (higher
than 0 dB) denotes more seismic signal than
environmental noise, whereas a ratio equal to infinity
indicates that the environmental noise is equal to zero.
In this paper, the environmental noise introduced
during the training phase is Gaussian, producing
EC=10dB.
(.)
=
δ
(.)
(1)
=10
(2)
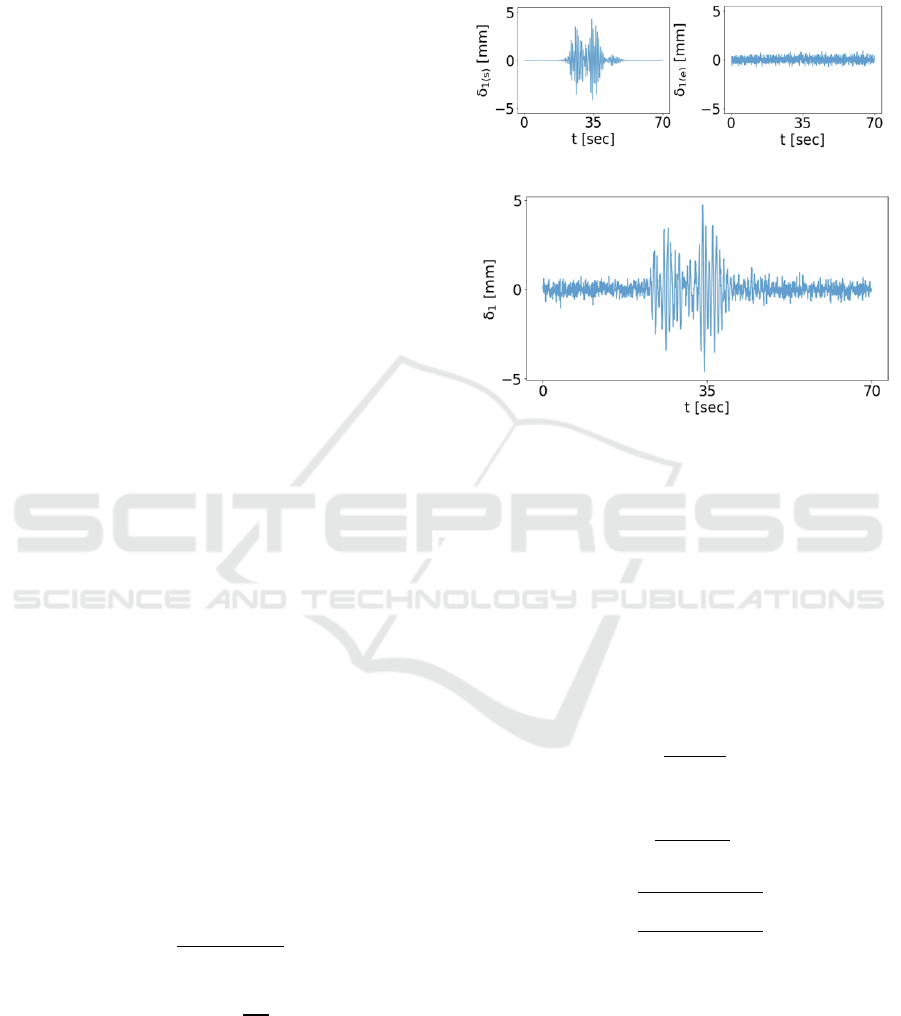
Both seismic signal and environmental noise
powers must be measured at the same or equivalent
points in a system, and within the same system
bandwidth. Figure 4 shows an example of seismic,
environmental signals, together with the integrated
signal.
(a)
(b)
(c)
Figure 4: (a) example of seismic signal detected by sensor
1 during the simulation of seismic events; (b) example of
environmental noise modelling traffic, temperature,
pressure, rain, wind, and so on; (c) the integrated signal.
Data preprocessing has been carried out to
manage the scaling of the data. In particular, a z-score
scaling has been applied for all signals collected from
the same sensor.
More formally, Equations (3), (4) and (5) define
the preprocessing.
=
−
(3)
=
(4)
=
−
(5)
To split the data into training (90%) and test
(10%) sets, the hold-out method is adopted; the
relevant class numerosity for training and test sets is
summarized in Table 2.
DeLTA 2022 - 3rd International Conference on Deep Learning Theory and Applications
202

Figure 5: Data Pipeline.
Figure 6: Convolutional NN architecture.
Table 2: Seismic events dataset composition.
Label Training set Test set
∆
0
994 117
∆
1
1003 108
∆
2
1008 103
∆
3
998 113
∆
4
992 119
∆
5
1001 110
∆
6
998 113
∆
7
1005 106
∆
8
1001 110
2.3 The CNN Architecture
To summarize the data pipeline, Figure 5 shows the
main steps. A Convolutional Neural Network (CNN)
is proposed to perform such classification task. CNN
is a class of NNs that has become dominant in various
domains such as computer vision, signal processing,
speech recognition (Li, Zhang, Zhang, & Wei, 2017)
(Galatolo F. A., 2018) (Galatolo F. A., 2019).
CNN is designed to automatically and adaptively
learn feature hierarchies through backpropagation,
using multiple building blocks such as convolution
layers, pooling layers, and fully connected layers.
This section focuses on the CNN architecture,
illustrated in Figure 6. Specifically, the convolutional
architecture consists of 4 blocks. The first three deal
with feature extraction, whereas the last one performs
the classification task. Each of the first three blocks
consists of a 1D convolutional layer, a 1D max
pooling layer, and a dropout layer; in addition, a
flatten layer is added at the end of the feature
extractor. The classifier block is composed of two
dense layers separated by a dropout one.
Figure 6 shows the hyper parameter values for the
design of each layer. The training is run for 200
epochs, using the Adam optimization algorithm; the
validation set is generated from the training set by
taking 20% of the records.
To avoid overfitting phenomena, an early
stopping condition callback is set. It ends the CNN
training before it has reached the number of allowed
epochs, when the loss computed on the validation set
does not decrease for a number of epochs equal to
patience=10.
The damage location task is modelled as a
multiclass classification problem, where the output
label to be predicted identifies a potential region on
the building. The categorical crossentropy is the loss
function to be minimized during training, used in
multiclass classification tasks. Equation (6) shows
how the loss function can be computed given an
Structural Damage Localization via Deep Learning and IoT Enabled Digital Twin
203

observation, where ∆′
j
is the i-th scalar target value in
the actual vector ∆′ obtained by transforming the
numerical variable ∆ into a categorical one; ∆
′
j
is the
corresponding value in the predicted output.
=−∆′
∆
′
(6)
In order to measure the performances of the
model, three metrics are adopted, accuracy, precision,
and recall, represented in Equation (7), (8) and (9)
respectively.
=
+
+ ++
(7)
=
+
(8)
=
+
(9)
where TP = True Positive, FP = False Positive, TN
= True Negative, and FN = False Negative.
3 EXPERIMENTAL RESULTS
AND DISCUSSION
The overall methodology has been developed on
Google Colab (Bisong, 2019), a free platform based
on the open-source Jupyter project. Both the data
source and the code have been publicly released
(Parola, 2022), to foster collaboration and application
on various infrastructures.
The device used is an NVIDIA Tesla K80 GPU.
The training process ends after 97 epochs due to early
stopping condition, restoring model weights from the
end of the best epoch.
The loss and accuracy on the validation set during
training are shown in Figure 7 and Figure 8,
respectively. From both figures, we can observe that
there are no overfitting phenomena, the curves
computed on training and validation sets have the
same trend. Moreover, we can observe a slightly
irregular trend, due to the presence of dropout layers.
The convolutional model achieves a global
accuracy of 83%. Figure 9 shows the accuracies
through a confusion matrix, while Table 3 shows the
precision and recall values per class.
Figure 7: Loss learning curve.
Figure 8: Accuracy learning curve.
Figure 9: Confusion matrix on test set.
Since the environmental noise level may vary, and
this is not known a priori, an assessment of the model
performance with different noise level of the test set
is carried out, to understand its robustness with
respect to different environmental conditions. Model
testing is repeated 13 times, varying the noise level
and producing the corresponding EC values of the test
set between 1 dB and 25 dB, as shown in Figure 10.
DeLTA 2022 - 3rd International Conference on Deep Learning Theory and Applications
204
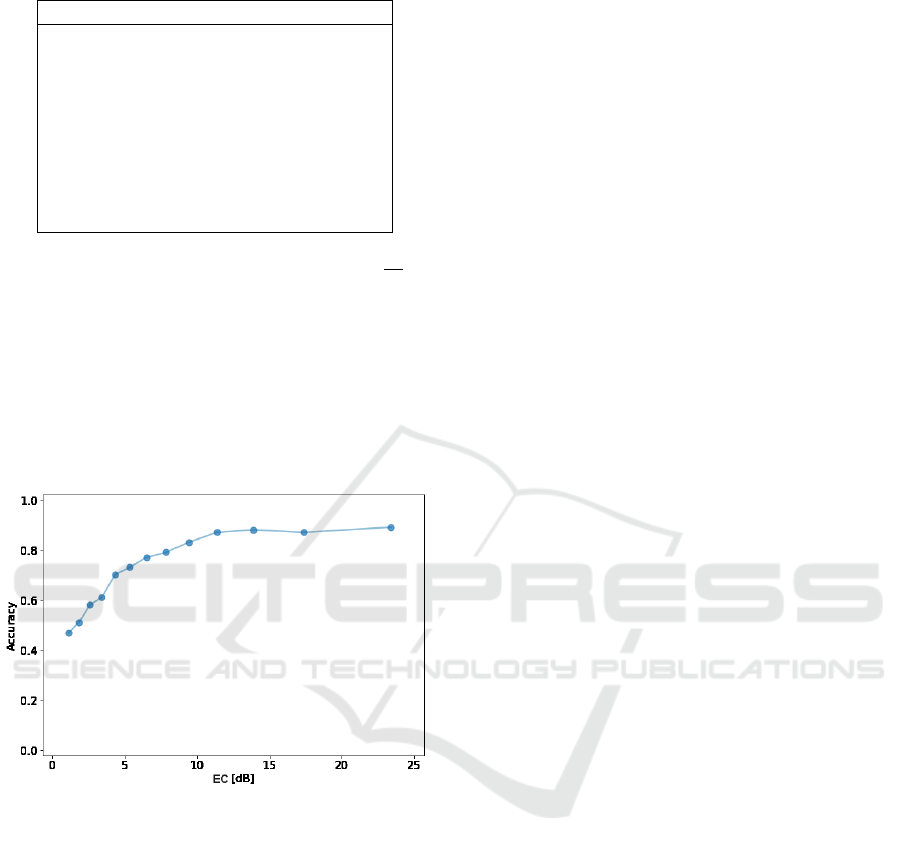
Table 3: Damage localization test results by class.
Class Precision Recall
∆
0
.56 .59
∆
1
.54 .61
∆
2
.95 .88
∆
3
.61 .71
∆
4
.94 .92
∆
5
.99 .97
∆
6
.91 .78
∆
7
1.0 .98
∆
8
1.0 1.0
In Figure 10, we can observe that the
convolutional model is still able to detect damage-
sensitive patterns, despite the increasing amount of
noise in the data. Specifically, by using training data
with EC= 10 dB, good performance is achieved on
test set with EC larger than 10 dB. For test set with
EC lower than 10 DB a decrease in the accuracy value
can be observed. In this application context, the
prediction capability of the damage location is
acceptable as long as the EC value is larger than 5 dB.
Figure 10: Model accuracy on test set varying the EC
values.
4 CONCLUSIONS
In this work, an integrated method made by a
Convolutional Neural Network and a Digital Twin
has been proposed in the context of Structural
Damage Localization. To illustrate the approach, the
Digital Twin of a sample infrastructure is modelled
through a Reduced-Order Model method, together
with the digital model of commercial IoT devices.
The CNN architecture has been also detailed. The
overall pipeline has been developed and publicly
released. Different environmental conditions have
been experimented on testing, to show the
effectiveness of the approach.
This paper represents a preliminary work to show
the potential of the proposed approach. As a future
work, other problem to solve, such as building
affected by simultaneous multiple damages, should
be considered. Further, acceleration sensing should
be taken into account together with displacement, to
support a multimodal monitoring.
ACKNOWLEDGEMENTS
This work has been supported by: (i) the TLC
company Move Srl, Lucca LU, Italy; (ii) a research
team of Politecnico di Milano composed by Alberto
Corigliano, Andrea Manzoni, Luca Rosafalco and
Stefano Mariani; (iii) the Italian Ministry of
Education and Research (MIUR) in the framework of
the CrossLab project (Departments of Excellence).
REFERENCES
Aydemir, H., Zengin, U., & Durak, U. (2020). The digital
twin paradigm for aircraft review and outlook. In AIAA
Scitech 2020 Forum (p. 0553).
Bisong, E. (2019). Bisong, E. (2019). Building machine
learning and deep learning models on Google cloud
platform. Berkeley, CA, USA.
David, J., Chris, S., Aydin, N., Jason, Y., & Ben, H. (2020).
Characterising the Digital Twin: A systematic literature
review. CIRP Journal of Manufacturing Science and
Technology, 29, 36-52.
Fabio, P., Ferrari, R., & Rizzi, E. (2016). Output-only
modal dynamic identification of frames by a refined
FDD algorithm at seismic input and high damping.
Mechanical Systems and Signal Processing, 265-291.
Galatolo, F. A. (2018). Using Stigmergy to Incorporate the
Time into Artificial Neural Networks. Springer, Cham,
pp. 248-258.
Galatolo, F. A. (2019). Using stigmergy as a computational
memory in the design of recurrent neural networks.
arXiv preprint, arXiv:1903.01341.
Joaquín, A., Ana, J., Jesús, U., & Fernando, J. Á. (2015).
Realistic modeling of underwater ambient noise and its
influence on spread-spectrum signals. OCEANS 2015-
Genova, (pp. 1-6) IEEE.
Li, D., Zhang, J., Zhang, Q., & Wei, X. (2017).
Classification of ECG signals based on 1D convolution
neural network. In 2017 IEEE 19th International
Conference on e-Health Networking, Applications and
Services (Healthcom), (pp. 1-6). IEEE.
Paolucci, R., Gatti, F., Infantino, M., Smerzini, C., Özcebe,
A. G., & Stupazzini, M. (2018). Broadband ground
motions from 3D physicsbased numerical simulations
using artificial neural networks. Bulletin of the
Seismological Society of America, 108(3A), 1272-
1286.
Structural Damage Localization via Deep Learning and IoT Enabled Digital Twin
205

Parola, M. (2022). structural_health_monitoring. Tratto da
GitHub:
github.com/MarcoParola/structural_health_monitoring
Rainieri, C., Fabbrocino, G., & Cosenza, E. (2007).
Automated Operational Modal Analysis as structural
health monitoring tool: theoretical and applicative
aspects. p. 479-484.
Rosafalco, L., Torzoni, M., Manzoni, A., & Mariani, S.
(2021). Online structural health monitoring by model
order reduction and deep learning algorithms.
Computers & Structures, 255, 106604.
Sabetta, F., & Pugliese, A. (1996). Estimation of response
spectra and simulation of nonstationary earthquake
ground motions. Bulletin of the Seismological Society
of America, 86(2), 337-352.
Torzoni, M., Rosafalco, L., & Manzoni, A. (2020). A
Combined Model-Order Reduction and Deep Learning
Approach for Structural Health Monitoring under
Varying Operational and Environmental Conditions.
Engineering Proceedings, 2(1), 94.
Wang, X. (2022). Probabilistic machine learning and
Bayesian inference for vibration-based structural
damage identification. Tratto da Polyu electronic
theses: theses.lib.polyu.edu.hk
Ye, X., Jin, T., & Yun, C. (2019). A review on deep
learning-based structural health monitoring of civil
infrastructures. Smart Struct. Syst.
Yiğitler, H., Behnam, B., & Riku, J. (2020). Overview of
time synchronization for IoT deployments: Clock
discipline algorithms and protocols. Sensors, 20(20),
5928.
Yuqian, L., Chao, L., Kevin, I.-K. W., Huiyue, H., & Xun,
X. (2020). Digital Twin-driven smart manufacturing:
Connotation, reference model, applications and
research issues. Robotics and Computer-Integrated
Manufacturing, 61, 101837.
DeLTA 2022 - 3rd International Conference on Deep Learning Theory and Applications
206
