
Challenges of Autonomous In-field Fruit Harvesting and Concept of a
Robotic Solution
Tim Tiedemann
1
, Florian Cordes
2
, Matthis Keppner
1
and Heiner Peters
2
1
Department CS, University of Applied Sciences Hamburg, Berliner Tor 7, Hamburg, Germany
2
German Research Center for Artificial Intelligence, Robotics Innovation Center, Bremen, Germany
Keywords:
Agricultural Robotics, Machine Learning, Autonomous Harvesting, Multi-spectral Imaging, Classification.
Abstract:
Since the beginning of humans cultivating plants in fields, agriculture underwent a continuous shift from
purely manual labor over simple machinery to more and more automated processes. Autonomous driving with
navigation and self localization in the field is state of the art. Also, automated machines for fruit processing are
available as well. In cases where the fruit is damageable and varies in size and shape, automated processing is
challenging. One example of such damageable fruits are strawberries. Size, weight, and shape at the optimal
ripeness can vary a lot. Additionally, a change from ripe to overripe occurs relatively quick and is sometimes
hard to recognize. A further challenge when harvesting strawberries is a dense leafage that can cover the fruits
partly or completely. In this paper, a concept of an autonomous in-field strawberry harvesting robot for non-
elevated but ground-raised strawberry plants, with or without a tunnel, is presented. The robot is supposed to
use multi-spectral imaging and machine learning based ripeness classification. Besides the overall concept,
first data of this early-stage project is shown, too.
1 INTRODUCTION
The overall goal of the project presented in this work
is to develop a small scale robotic system for auto-
mated harvesting of strawberries. A small scale robot
can easily scale up to any farm size by being de-
ployed multiple times in parallel, while a lower in-
vestment per unit makes the system also attractive for
smaller farms. The SHIVAA (Strawberry Harvester:
an Innovative Vehicle for Agricultural Applications)
robot will be deployed in open fields alongside human
workers. Initially, we will focus on the picking itself,
however numerous additional use cases have already
been identified and will be elaborated further during
the running project.
1.1 Motivation
Since the beginning of agriculture, mankind sought
for ways to improve the efficiency by increasing the
area of land manageable by one person. Starting
with animal-pulled machinery, over fuel driven multi-
purpose tractors to currently partially self-driving
connected tractors, the complexity and automation in
agriculture increased by time. Generally speaking, a
higher degree of automation in agriculture can lead
to higher efficiency and an improved supply safety.
A combine harvester is a huge machine that allows a
single operator to harvest hundreds of tons of wheat
per day, the current top rate is around 800 t in 8 h.
Yet, there are still fruits and vegetables that are more
labor intensive. Strawberries are a high priced fruit
that up to date needs human labor for harvesting. Ex-
perienced human workers can harvest up to 40 kg per
hour, while the mean value over all workers is more
around 20 kg per hour. With increasing salaries in
countries where workers are classically recruited or
travel restrictions as seen during the COVID-19 pan-
demic crisis, finding human workers for the harvest
gets more and more complicated. Here, a robotic
harvester can fill the gaps from missing human work
force.
1.2 Challenges
Many challenges exist for full automation of agricul-
tural processes in general. Focusing on sensitive fruit
such as strawberries puts further challenges in terms
of careful handling while picking and deploying the
fruit. Furthermore, aiming for a robotic harvesting in
standard outdoor fields without special adaptations to
the harvester leads to more problems that need to be
508
Tiedemann, T., Cordes, F., Keppner, M. and Peters, H.
Challenges of Autonomous In-field Fruit Harvesting and Concept of a Robotic Solution.
DOI: 10.5220/0011321300003271
In Proceedings of the 19th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2022), pages 508-515
ISBN: 978-989-758-585-2; ISSN: 2184-2809
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

solved. Figure 1 shows a standard strawberry field
covered with tunnels (with eight ridges each tunnel).
The left photo shows the field in autumn. Strawberry
plants can have leaves effectively hiding the fruit-to-
be-harvested from sensors on a robot. Here, mech-
anisms to exhibit the fruits to a sensor need to be
developed. In Figure 1 (right) the field in spring is
shown. Some fruits are not visible in the camera im-
age, others are partially covered. All the challenges
need to be tackled while guaranteeing a speedy oper-
ation. Clearly, a robot with a worse picking quota than
human workers will stand no chance of being widely
adopted by the market.
1.3 Related Work
Robotic systems which are capable of harvesting
strawberries autonomously have already been pre-
sented by multiple research groups. Some presented
robots were designed for elevated-trough cultures
where the strawberry plants are grown in a trough el-
evated at between 50 cm to 100 cm above ground.
Feng et al. describe a mobile robot platform with a 6-
DOF manipulator and sonar-based navigation (Feng
et al., 2012).
Ge et al. use a similar environment of elevated-
trough cultures and describe very detailed the image
based fruit detection and localization (Ge et al., 2019).
Xiong et al. designed and evaluated different straw-
berry harvesting robots. While some tests of a previ-
ous version were carried out in tunnels and on sandy
ground, they focus on elevated-trough (“table-top”)
cultures in the later publication (Xiong et al., 2020).
However, they show interesting results and insights,
e.g., regarding the gripper, regarding picking in clus-
ters of strawberries, and regarding varying lighting
conditions.
Hayashi et al. present an evaluation of their sys-
tem in a field-test. The environment is an evaluated-
trough setting, too. Interesting is their comparison
of machine and human assessment of the strawber-
ries’ maturity and their solution concept focusing at
night operation and allowing task-sharing with human
workers (Hayashi et al., 2010).
To achieve a similar picking speed as a human
picker, it may be necessary to use dual arm manipula-
tion. (Le Flecher et al., 2019) described a visual pre-
dictive control strategy for two arms sharing a com-
mon work space. An interesting agricultural robot,
which combines several approaches to navigate au-
tonomously in a field was proposed in (Post et al.,
2017), even if it is not explicitly about strawberry har-
vesting. A number of robots have already been pub-
lished that are able to navigate in the open field and
perform manipulation tasks autonomously, e.g. the
robots Artemis (Schwender et al., 2014) and Coyote
(Sonsalla et al., 2015). However, these systems are
not specialized enough for rapid crop manipulation
and consequently too slow for use in the strawberry
field.
Most of the papers listed deal with the cultivation
of strawberries on elevated-trough cultures or cover
only partial aspects of the overall process necessary
for strawberry harvesting. However, the target envi-
ronment of the robot concept described in this work
is non-elevated, ground-based and dam-raised straw-
berry plants, outdoors, with or without tunnels.
Currently, there are several pre-product solutions
of robots for harvesting strawberries. One example
is the Agrobot
1
, which makes use of up to 24 arms
working in parallel. It is stated, that the robot is suit-
able for table cultures as well as free field strawber-
ries. The company Harvest Croo Robotics provides
a comparable system
2
, with 16 arms working in par-
allel. The system can scan a fruit in a 360
◦
view to
assess the ripeness. A visual system is used to locate
the fruit prior to picking it from the plant. Systems
for table cultures are the Rubion
3
developed by the
company Octinion and the Dogtooth
4
robot with two
picking arms.
Finally, work focusing on multi-spectral or hyper-
spectral image classification has been published, too.
Multi-spectral image based classification is used in
several applications. UV, visual, and SWIR 2D im-
ages are used by Tiedemann et al. for the classifica-
tion of a large range of different materials in coarse-
waste recycling (Tiedemann et al., 2021). For applica-
tions in agriculture Pasolli et al. give a good overview
of studies and methods. There, airborne and satel-
lite data collection in the spectral range of 400 nm
to 2,500 nm dominate but terrestrial collections and
the methods (which are good candidates for the straw-
berry classification) are discussed, too (Pasolli et al.,
2018). Devassy and George compare different re-
gression models for the estimation of the firmness
of strawberries using hyperspectral imaging (Devassy
and George, 2021).
Klaoudatos et al. present a non-mobile system
consisting of a standard 6-DOF manipulator, a fin ray
gripper, and a vision system that was tested in labora-
tory only. However, the vision system gives interest-
ing insights by an implementation that uses classical
image processing on red and green channels only plus
depth information from a Kinect sensor (Klaoudatos
1
https://www.agrobot.com/e-series; as of 2022-04
2
https://www.harvestcroorobotics.com/; as of 2022-04
3
https://picking.technology/; as of 2022-04
4
https://dogtooth.tech/; as of 2022-04
Challenges of Autonomous In-field Fruit Harvesting and Concept of a Robotic Solution
509

Figure 1: Left: Photo of an outdoor strawberry field with an 8-row tunnel, taken in autumn (Tiedemann, 2022b, under CC-BY
4.0). Right: Lower view position between the ridges, taken in spring (Tiedemann, 2022a, under CC-BY 4.0).
et al., 2019).
Although many of the pre-product solutions pro-
vide promising approaches, two major drawbacks
stand out in our opinion. Solutions that already work
in the field are mostly very large and complex ma-
chines that, although performance still needs to be
improved, require a large investment volume. Smaller
systems, with lower barriers to investment, have so far
been limited to specific types of cultivation such as
table crops and their performance is far too slow for
widespread use, yet. And a general solution for stan-
dard non-elevated/non-table-top fields is still missing.
2 PROPOSED ROBOTIC
CONCEPT/SOLUTION
2.1 Requirements
A detailed list of all the requirements we found in
workshops and discussions with farm owners is be-
yond the scope of this paper. However, the most im-
portant requirements are summarized as follows
• operation in open field, all weather conditions
possible: rain, heat, frost, mud, dust,... an IP rat-
ing of IP65 shall be reached.
• row width is different on different farms. Cur-
rent setpoint is 1 m row width, needs to be easily
adaptable
• experienced human pickers can pick 40 kg of
strawberries per hour, the mean is around 20 kg.
Given the mean weight of a strawberry, the rover
shall reach around 25 harvested strawberries per
minute.
• a payload capacity of 90 kg for the final system
shall be reached. 90 kg of ripe fruits are to be ex-
pected per row in high season.
2.2 Overall Concept
2.2.1 General Platform Concept
The general robotic concept forsees a four wheeled
rover system, roughly the size of a table. Four legs
will be used to reach a platform height well above the
strawberry plants. Two manipulation arms with spe-
cific gripper elements are mounted to the robot such
that they can operate below the main platform. All
four wheels will be actively driven, while only the
two hind wheels are steerable in order to reduce the
number of actively actuated joins as far as possible.
A detailed description of the current system design is
provided in Section 2.3.
2.2.2 Concept of Operation
For start of operations, the robot is deployed by a hu-
man at the strawberry field. Once enabled, the hu-
man operator navigates the robot to the first row to be
harvested using a remote control unit. After manual
placement, the robot is standing with its body over
the first strawberry plants. By enabling the harvesting
mode, the robot starts its operational loop:
1. detect strawberries
2. extract gripping poses for
(a) ripe strawberries
(b) foul/overripe fruits
3. harvest all strawberries below robot using linear
drivable manipulation arms
4. put ripe fruit into selling boxes / overripe fruit into
waste bin
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
510

5. if end of row is not reached move platform for-
ward one body length begin at 1., else
6. execute row change and start at 1.
2.2.3 Scenarios
The overall objective of the project is to enable the
SHIVAA system to move mostly autonomously in the
strawberry field and harvest strawberries. The robot
should be deployed in an outdoor field, possibly with
humans working in close vicinity of the robot.
The system includes a base platform which can
move around the field on wheels. The current con-
cept forsees 4 driven wheels, two of which are also
steerable, see also Section 2.3. The base platform
is equipped with one or more manipulators, each of
which can in turn hold a gripper as an end-effector.
For detecting ripe strawberries, the platform and/or
the manipulators are equipped with suitable imaging
sensor technology. Additional sensor technology on
the platform enables self-localization in the field and
reliable tracking of the strawberry rows. The platform
is also equipped with a receptacle for empty straw-
berry crates, which are ready loaded with hulls.
The demonstration scenario intended for SHIVAA
follows the concept of operations as described in Sec-
tion 2.2.2. After manual deployment at the first row,
the rover autonomy is initiated and the robot starts
picking strawberries. The rover drives forward a full
body length and initiates a detection cycle. The poses
of the ripe fruits to be harvested and the foul fruits
to be sorted out are extracted and sent as two indi-
vidual lists to the manipulation planner. After plan-
ning the manipulator trajectory, harvesting of a fruit is
conducted, before a new manipulation plan is issued.
Once all fruit are harvested or sorted out beneath the
current robot position, the rover drives forward a body
length and the cycle starts over again.
Further scenarios investigated are (i) leave pick-
ing: The leaves of the plants are to be reduced be-
fore the harvesting season. This might help the plants
to build better fruits, reduce humidity and hence fun-
gal attack and consequently the use of fungicide. (ii)
Mowing between the rows: On farms where there is
grass in between the rows of strawberries, the robot
can be used to keep the grass short. (iii) keeping track
of ripeness: while driving through the rows (during
harvest or other tasks) the robot can take the ripeness
of the fruits to project an expected harvest for the next
time frame. A forecast of the harvested amount of the
next week can help setting efforts and prices.
2.3 Robotic Platform
The SHIVAA system is intended to be a small, cost-
effective system for harvesting strawberries on dam
cultures in the open field (see Figure 2). The unloaded
weight of the system is limited to max. 120 kg, so
that it can be carried by four persons if necessary. To
allow autonomous operation of the system for at least
3 hours, the robot is equipped with a 1.5 kWh Li-Ion
battery.
The robot can move forward on four actively
driven wheels with a top speed of min. 6 km/h and
a preliminary estimated nominal torque of each drive
of 35 Nm. To allow various steering modes the rear
wheels are equipped with individually controllable
steering actuators. Because of the layout of the dam
crops the track width is fixed to exactly one meter
with a wheelbase of approximately two meters. To
compensate ground unevenness up to at least 100 mm
by the undercarriage the rear legs are coupled via a
differential.
Strawberry picking is performed on both sides and
below the robot, so that the lower face of the central
body must be at least 0.8 m above ground level to en-
sure a wide enough manipulation area.
Two manipulator arms, each equipped with a grip-
per, are used for picking and manipulating fruit. Since
a manipulation space of at least one meter along the
strawberry row is to be covered on both sides of the
dam in order to be able to statistically compensate for
non-uniform growth, the manipulators can be moved
on linear guides along the sides of the robot.
The further kinematic chain of each manipulator
consists of three DOF arranged in a plane orthogonal
to the longitudinal axis of the robot, and an additional
rotation around the central axis of the end effector.
The reach of one manipulator is approximately 0.8 m,
with the length of the upper and lower arm segments
being 0.4 m each. The manipulator arms follow a low
inertia design principle to allow fast movements with
high accelerations between picking and placement lo-
cations. To achieve this, all four drives are shifted
to the base of the robot so that their mass does not
need to be accelerated except along the linear guide.
The drives are kinematically coupled to the arm base.
The torque is transmitted to the respective joints via
belt drives, with the more distant joints being coupled
from joint to joint. Because the axis of rotation of the
fourth DOF is not in the same plane as the other joint
axes, the third and fourth DOF are coupled differen-
tially. The movement of these two DOF is therefore
dependent on the interaction of the same two drives.
A plastic bevel gear is used for the differential cou-
pling. Figure 3 shows a schematic view of the arm
Challenges of Autonomous In-field Fruit Harvesting and Concept of a Robotic Solution
511
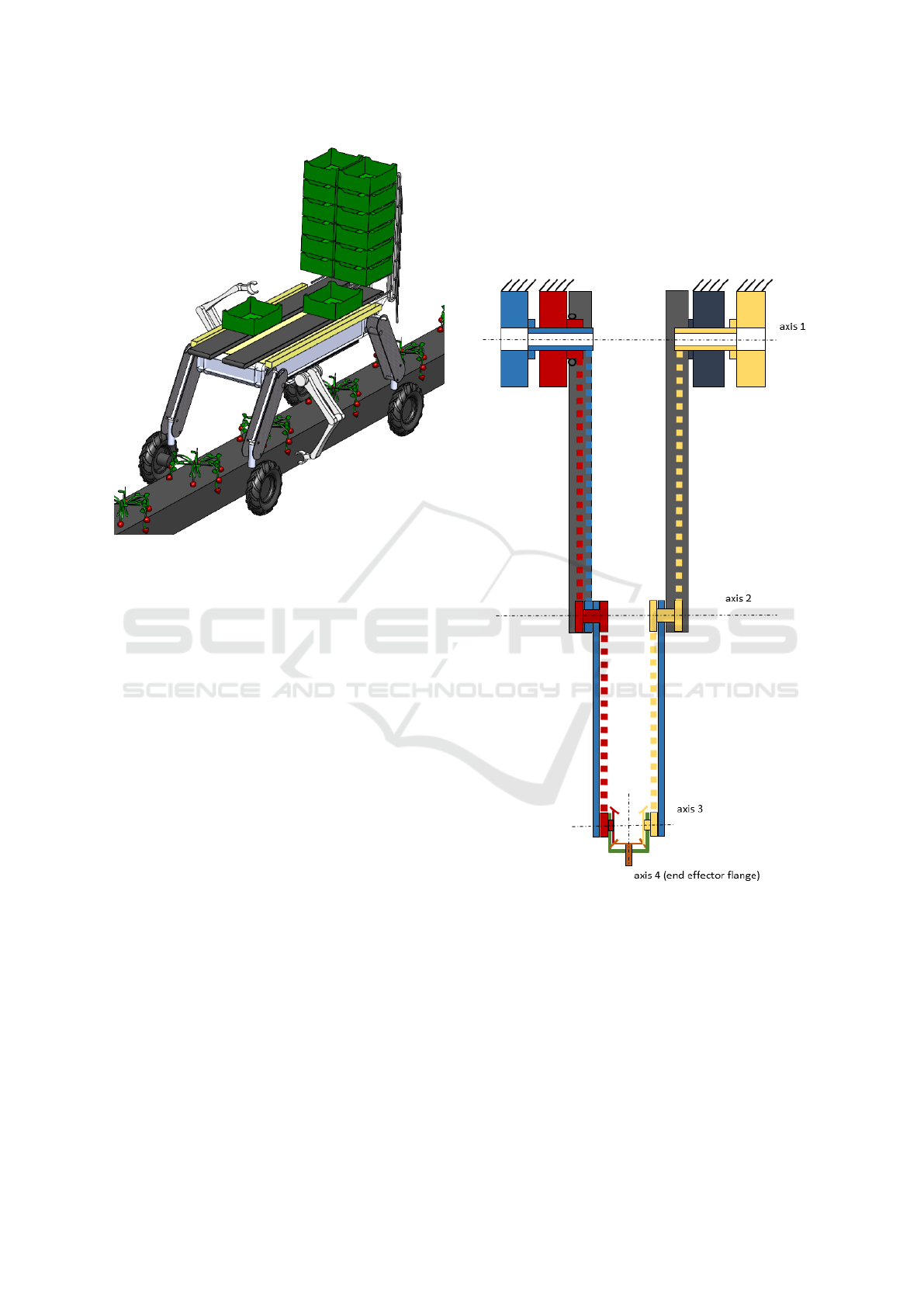
Figure 2: Mechanical concept of the proposed strawberry
picking robot.
actuation concept.
The actuation of the arm DOF is done by BLDC di-
rect drives. External rotor motors are used for this
purpose. The transmission to the respective joint axis
is performed by up to two belt gear stages with a
total reduction ratio of up to 1:6. The transmission
ratio is selected according to the respective nominal
torque requirements, whereby the same motor is used
for each degree of freedom.
The picking process takes place independently on
both sides of the robot, with the fruit being picked be-
low the robot and placed directly into provided boxes
above the robot. Each fruit thus only needs to be
touched once, minimizing the risk of damage to the
fruit. Due to the limited linear travel speed of the
manipulators along the longitudinal axis of the robot,
the deposit boxes are moved along on conveyor belts
to follow the manipulator position. Full boxes can
be transported to the back of the robot while empty
boxes are supplied from a storage system on the robot.
Fruits that have been classified as overripe or bad
fruits during image recognition are not placed in the
boxes but in depositories along the robots flanks.
In order to keep the inertia of the entire manip-
ulator as low as possible, especially the end effector
should apply minimal weight. In this case the end ef-
fector will probably be a gripper with a maximum of
two DOF, whereby the fruit is first sucked in and held
in the center of the gripper by a vacuum system so
that, in a second step, the fruit can be easily enclosed
by the gripper. Separating the fruits from the plant oc-
curs by a combined pulling and twisting motion with
the help of the manipulator arm. The required un-
der pressure system can be placed in the central robot
body, so that only a pneumatic tube and the electric
wiring has to be transferred through the arm.
Figure 3: Schematic representation of the arm actuation,
where the black motor actuates axis 1, the blue motor actu-
ates axis 2, and the red and green motor are coupled differ-
entially to axes 3 and 4. If they rotate in the same direction,
the end effector rotates around axis 3. If they rotate in the
contrary direction, the end effector rotates around axis 4.
2.4 Sensor Setup for Fruit Detection
and First Data
The tasks the sensory system of the robot has to fulfill
are (1) the detection of strawberries within the robot’s
workspace, (2) the classification of the strawberries in
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
512

ripe, not yet ripe, and overripe, and (3) the localiza-
tion of the ripe and the foul strawberries (both have
to be harvested and will be put into different boxes).
Optionally, a detection of leaves could be a task for
the robot in case leaves have to be removed or pushed
aside by the robot. And finally, one additional de-
mand might be that the system needs to be run ei-
ther at night (compare (Hayashi et al., 2010)) with
controlled but fully artificial lighting or at day time –
with brighter environmental lighting but varying with
dawn, dusk, and weather conditions.
For the solution of several classification tasks in
agriculture and other applications a combination of
visual images (sometimes with a separate “red-edge”
channel) and near-infrared (NIR) images are used –
sometimes extended by UV and/or short-wave in-
frared (SWIR) images (Tiedemann et al., 2021). In a
first phase, sample data of ripe, not ripe, damaged and
overripe strawberries is collected in 17 spectra from
250 nm to 1,550 nm. Based on the first data collec-
tion a subset of the 17 spectra is selected for the final
prototype and is evaluated in a second phase. The up
to 17 2D-images are used together for the detection
and classification task. If a strawberry is detected and
needs to be harvested, its position relative to the robot
is determined using a further sensor. For this task a
time-of-flight (TOF-) camera, a stereo camera, or a li-
dar will be used. The selection of the sensor to be used
in this task is done based on tests in the first project
phase.
The multi-spectral imaging (MSI) data sets are
collected with three different cameras (UV camera,
visual camera, SWIR camera) and with different spec-
tral filters. Figure 4 shows an exemplary overview of
one MSI data set.
To analyze and to visualize the relation between
single spectral components and the classification of
ripeness, false color images can be used. In Figure 5
an example is depicted with the spectral images of
845 nm, 1,450 nm, and with an image taken by the
SWIR camera with no filter as components red, green,
and blue, respectively. At the bottom right strawberry
a defective/foul area can be recognized quite easily.
The actual advantages of MSI can be utilized fully
when all available spectral images (dimensions) are
used. However, this data is hard to study and to
understand for humans. E.g., the false color image
uses only 3 of the 17 dimensions. However, to clas-
sify ripe from non-ripe from overripe strawberries and
from other parts of the plants, machine learning (ML)
based methods will be applied and studied. These
methods use all 17 dimensions and are supposed to
be able to classify correctly between the classes men-
tioned above. First tests will be carried out with sup-
port vector machines (SVM) which were dominating
classification tasks until deep methods as the convo-
lutional neural networks (CNN) showed better perfor-
mance in several applications. However, these were
high-dimensional classification task like image clas-
sification with hundreds or thousands dimensions and
with local relations between input dimensions. It is
expected that such properties need not to be used in
the classification task in this project, thus, no object
classification / no classification of a whole strawberry.
Rather, a classification on single pixel basis is planned
as a first step, using only the 17 gray values of the dif-
ferent spectra. In a second step pixel classifications
can be grouped by size and class leading to an ordered
list of strawberries of different classes and sizes.
To get a first impression of the task the classifier
has to solve, again a visualization with only up to
four dimensions is helpful. Besides more elaborated
and complex methods as principle component analy-
sis (PCA) or t-SNE visualization, a simple projection
from the 17-dimensional to a three-dimensional space
can give interesting insights. Figure 6 shows a projec-
tion on the dimensions 324 nm, 740 nm, and 1,550 nm
with the color as fourth dimension encoding the class
of the pixel as labeled ground truth. There, the back-
ground (blue) can be separated clearly from the rest,
stem and leaves (yellow and green) are harder to sep-
arate (but could be possible), the brown non-ripe area
and the black (defective part) area are close to the red
(healthy and ripe) area but seems to be separable.
These first results of the data analysis give a good
reason to start with simple classification methods as
SVM or a simple multi-layer perceptron (MLP). Fur-
thermore, clustering, followed by a feature selection
and dimensionality reduction study will be next steps.
As a preparation for the next following step, a
first data collection in the field has been carried out.
Figure 7 shows the camera setup placed between the
ridges (dams). Four cameras have been used there
to collect multi-spectral data: (1) a UV camera, (2)
a SWIR camera, (3) a visual camera without an in-
ternal IR filter, and (4) a standard visual camera with
IR filter. The first three cameras were consecutively
equipped with different filter configurations to take
separate images per spectral band. The fourth cam-
era was used to take a visual reference image.
Next steps in this early project state are the pre-
processing of the collected data, a manual analysis of
the data and running first classification tests.
Challenges of Autonomous In-field Fruit Harvesting and Concept of a Robotic Solution
513
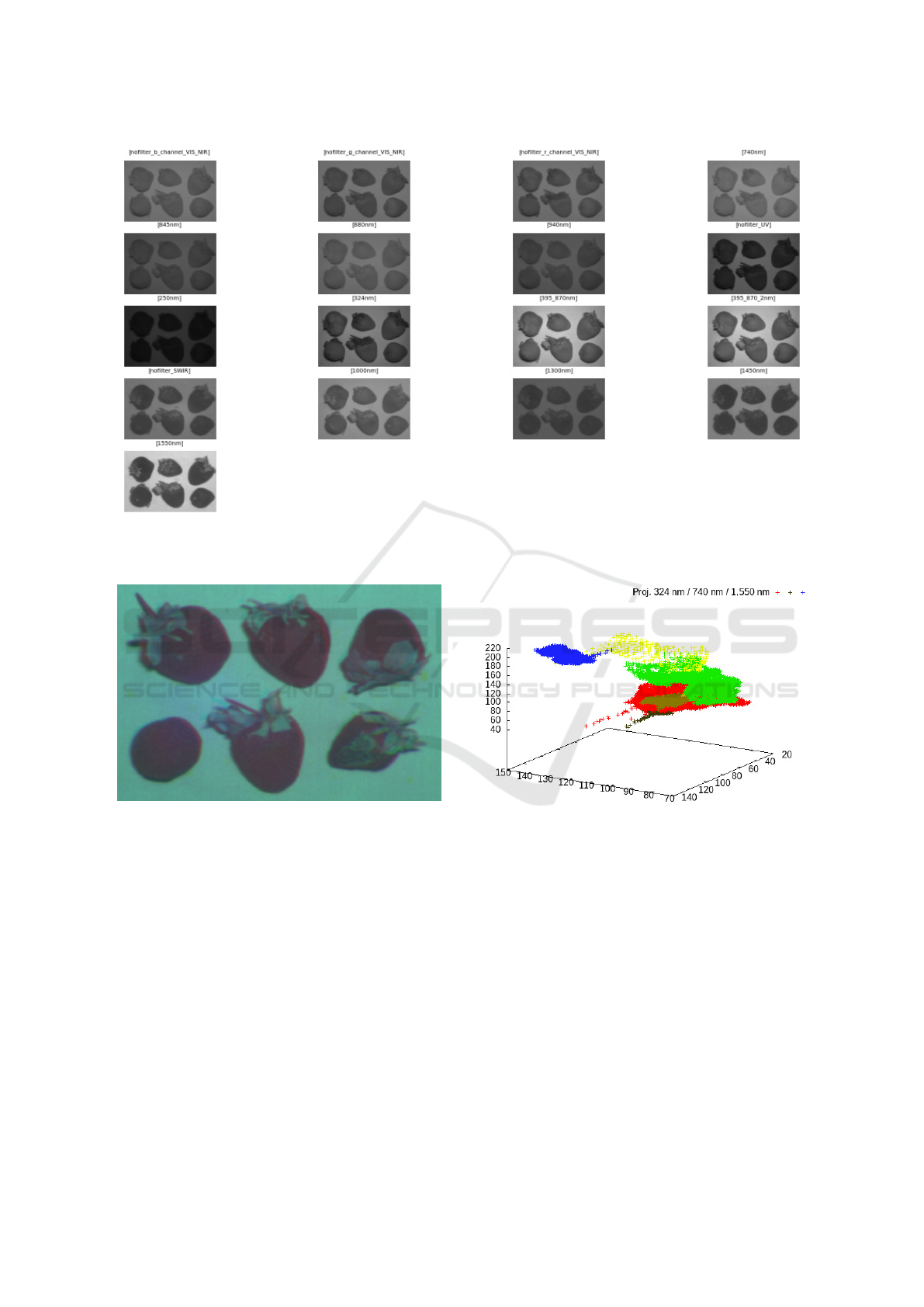
Figure 4: Overview of all images taken of a single scene. The images were taken with one of three cameras (UV, SWIR,
visual) and with one of multiple filters (or with no filter) in the range of 250 nm to 1,550 nm. The set of all images is used as
a single multi-spectral imaging (MSI) data set.
Figure 5: Example of a false color image.
3 SUMMARY AND OUTLOOK
This work presents a concept for an in-field ground-
based dam-raised strawberry harvesting robot, its me-
chanical setup, its sensor equipment, and planned
classification methods. Furthermore, first collected
data is shown and very first results of a data analy-
sis are discussed.
The next steps cover (1) the system specification,
(2) the mechanical design process in different steps
and (3) further in-field data collections. A set of
potentially applicable machine learning classification
methods will be evaluated using the data collection
sets.
Figure 6: Projection on three axes of a sample data set. Blue
is background, green are leaves, red is the strawberry fruit
in a healthy state, yellow is the stem. Especially interesting
are (1) the brown area within the red area which is a non-
ripe strawberry and the small black part below the red area
which is taken from a defective part.
ACKNOWLEDGEMENTS
The activities described in this paper are part of the
project RoLand with support from the Federal Min-
istry of Food and Agriculture (BMEL) by decision of
the German Bundestag. The Federal Office for Agri-
culture and Food (BLE) provides coordinating sup-
port for artificial intelligence (AI) in agriculture as
funding organisation, grant number 28DK103A20 /
28DK103B20 / 28DK103C20.
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
514

Figure 7: Setup used for a first in-field data collection. A
rigid frame carries four cameras used to collect the multi
spectral data. In this setting the frame is placed between the
ridges.
REFERENCES
Devassy, B. M. and George, S. (2021). Estimation of straw-
berry firmness using hyperspectral imaging: a com-
parison of regression models. Journal of Spectral
Imaging, 10.
Feng, Q., Wang, X., Zheng, W., Qiu, Q., and Jiang, K.
(2012). New strawberry harvesting robot for elevated-
trough culture. International Journal of Agricultural
and Biological Engineering, 5(2):1–8.
Ge, Y., Xiong, Y., Tenorio, G. L., and From, P. J.
(2019). Fruit localization and environment percep-
tion for strawberry harvesting robots. IEEE Access,
7:147642–147652.
Hayashi, S., Shigematsu, K., Yamamoto, S., Kobayashi, K.,
Kohno, Y., Kamata, J., and Kurita, M. (2010). Eval-
uation of a strawberry-harvesting robot in a field test.
Biosystems engineering, 105(2):160–171.
Klaoudatos, D. S., Moulianitis, V. C., and Aspragathos,
N. A. (2019). Development of an experimental straw-
berry harvesting robotic system. In ICINCO (2), pages
437–445.
Le Flecher, E., Durand-Petiteville, A., Cadenat, V., and Sen-
tenac, T. (2019). Visual predictive control of robotic
arms with overlapping workspace. In International
Conference on Informatics in Control, Automation
and Robotics (ICINCO).
Pasolli, E., Prasad, S., Crawford, M. M., and Tilton, J. C.
(2018). Advances in hyperspectral image classifica-
tion methods for vegetation and agricultural cropland
studies. In Hyperspectral Indices and Image Classifi-
cations for Agriculture and Vegetation, pages 67–104.
CRC Press.
Post, M. A., Bianco, A., and Yan, X. T. (2017). Au-
tonomous navigation with ros for a mobile robot in
agricultural fields. In 14th International Conference
on Informatics in Control, Automation and Robotics
(ICINCO).
Schwender, J., Roehr, T. M., Haase, S., Wirkus, M., Manz,
M., Arnold, S., and Machowinski, J. (2014). The
artemis rover as an example for model based engi-
neering in space robotics. In ICRA Workshop on Mod-
elling, Estimation, Perception and Control of All Ter-
rain Mobile Robots.
Sonsalla, R. U., Akpo, J. B., and Kirchner, F. (2015). Coy-
ote iii: Development of a modular and highly mo-
bile micro rover. In Proc. of the 13th Symp. on Ad-
vanced Space Technologies in Robotics and Automa-
tion (ASTRA-2015).
Tiedemann, T. (2022a). Outdoor Strawberry Field
in Tunnel, View Between Ridges. figshare. doi
https://doi.org/10.6084/m9.figshare.19929950.v1.
Tiedemann, T. (2022b). Strawberry Field, 8-
Row Tunnel, in Autumn. figshare. doi
10.6084/m9.figshare.19929332.v1.
Tiedemann, T., Keppner, M., Runge, T., V
¨
ogele, T.,
Wittmaier, M., and Wolff, S. (2021). Concept of
a robotic system for autonomous coarse waste re-
cycling. In Proceedings of the 18th International
Conference on Informatics in Control, Automation
and Robotics-ICINCO, pages 493–500. INSTICC,
SciTePress.
Xiong, Y., Ge, Y., Grimstad, L., and From, P. J. (2020). An
autonomous strawberry-harvesting robot: Design, de-
velopment, integration, and field evaluation. Journal
of Field Robotics, 37(2):202–224.
Challenges of Autonomous In-field Fruit Harvesting and Concept of a Robotic Solution
515
