
Analysis of the Squat Exercise from Visual Data
Fatma Youssef
1 a
, Ahmed B. Zaky
2,3 b
and Walid Gomaa
4,5 c
1
Computer Science Engineering, Egypt-Japan University of Science and Technology, Alexandria, Egypt
2
Computer Science and Information Technology Programs (CSIT),
Egypt Japan University of Science and Technology, Egypt
3
Shoubra Faculty of Engineering, Benha University, Benha, Egypt
4
Cyber Physical Systems Lab, Egypt Japan University of Science and Technology, Egypt
5
Faculty of Engineering, Alexandria University, Alexandria, Egypt
Keywords:
Exercise Assessment, Deep Learning, Transfer Learning.
Abstract:
Squats are one of the most frequent at-home fitness activities. If the squat is performed improperly for a
long time, it might result in serious injuries. This study presents a multiclass, multi-label dataset for squat
workout evaluation. The dataset collects the most typical faults that novices make when practicing squats
without supervision. As a first step toward universal virtual coaching for indoor exercises, the main objective
is to contribute to the creation of a virtual coach for the squat exercise. A 3d position estimation is used to
extract critical points from a squatting subject, then placed them in a distance matrix as the input to a multi-
layer convolution neural network with residual blocks. The proposed approach uses the exact match ratio
performance metric and is able to achieve 94% accuracy. The performance of transfer learning as a known
machine learning technique is evaluated for the squat activity classification task. Transfer learning is essential
when changing the setup and configuration of the data collection process to reduce the computational efforts
and resources.
1 INTRODUCTION
Physical activity is critical for our overall health.
Regular exercise strengthens our muscles and bones,
making daily tasks simpler. It reduces the risk of
heart disease and aids in the maintenance of normal
blood pressure. The impact of regular exercise on
our immune system is also noticeable. Exercise also
aids in the reduction of stress, anxiety, and depres-
sion (Abou Elmagd, 2016; Reiner, Niermann, Jekauc,
& Woll, 2013; Garber et al., 2011; Ohuruogu, 2016;
Schuch et al., 2016).
Due to the COVID-19 pandemic, it is now normal
to undertake workouts at home (Kaur, Singh, Arya,
& Mittal, 2020). Squat is one of the workouts that
have a significant impact on muscular building and
can be done at home because it requires no equip-
ment or a lot of space and is just dependent on one’s
weight (F
¨
uz
´
eki, Groneberg, & Banzer, 2020).
However, exercising at home without supervision
a
https://orcid.org/0000-0002-6286-9698
b
https://orcid.org/0000-0002-3107-5043
c
https://orcid.org/0000-0002-8518-8908
may be risky and lead to serious injury, especially
for strength exercises such as squats. Performing
squats incorrectly several times raises the risks of
lower limbs and trunk injury (Lorenzetti et al., 2018).
Thus, it is necessary to have an automated software
system to monitor people while working out at home.
The model should provide users with immediate feed-
back on their performance and mistakes. This sys-
tem’s goal is to assist individuals in preventing in-
juries when performing squats and to ensure that they
get the most out of their fitness workout (Liao, Vakan-
ski, & Xian, 2020; Ogata, Simo-Serra, Iizuka, &
Ishikawa, 2019).
There are various techniques to monitor individ-
uals while they undertake workouts using sensing
modalities such as RGB cameras, inertial measure-
ment sensors, depth cameras, infrared cameras, etc.
However, the most accessible and affordable way to
monitor people while performing exercises is by us-
ing a single monocular camera that can be found on
all mobile phones (Str
¨
omb
¨
ack, Huang, & Radu, 2020;
Ogata et al., 2019).
In this work, the main objective is to assess the
Youssef, F., Zaky, A. and Gomaa, W.
Analysis of the Squat Exercise from Visual Data.
DOI: 10.5220/0011347900003271
In Proceedings of the 19th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2022), pages 79-88
ISBN: 978-989-758-585-2; ISSN: 2184-2809
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
79

quality of squat exercises and identify the type of
mistake(s), if any, in the performed squat. De-
spite the numerous datasets in the literature related
to activity recognition in general, such as UCF101
Dataset (Soomro, Zamir, & Shah, 2012) and HMDB
Dataset (Kuehne, Jhuang, Garrote, Poggio, & Serre,
2011), or particularly to exercise recognition, such as
the MM-Fit Dataset (Str
¨
omb
¨
ack et al., 2020), there
are a few datasets for exercise assessment such as KI-
MORE Dataset (Capecci et al., 2019), Functional Se-
nior Fitness dataset (Bernardino et al., 2016) and Sin-
gle Individual Dataset (Ogata et al., 2019). KIMORE
Dataset (Capecci et al., 2019) and Functional Senior
Fitness dataset (Bernardino et al., 2016) aim to as-
sess the quality of rehabilitation exercises and the fit-
ness level of elderly people respectively. While Sin-
gle Individual Dataset (Ogata et al., 2019) assesses
the squat exercise in particular into seven categories,
six of them for bad squat and one for good squat. The
dataset contains only one subject performing squats
to produce a specific type of mistake each time.
The lack of datasets for squat assessment moti-
vated us to develop a dataset called EJUST-SQUAT-
21. EJUST-SQUAT-21 Dataset is an extension of the
work presented by Fayez, Sharshar, Hesham, Eld-
ifrawi, and Gomaa (2022) by increasing the number
of video samples and adding proper annotation for
various classification tasks. The details of the dataset
will be described in section 3.
In contrast to the previous datasets, the EJUST-
SQUAT-21 Dataset features a variety of users practic-
ing squats without being instructed on how to do them
correctly; consequently, the errors in their squats are
natural. Since users do squats without instruction, it
is usual for them to make many mistakes, producing
the EJUST-SQUAT-21 Dataset multiclass multilabel.
The videos in EJUST-SQUAT-21 Dataset had a
substantial difference in clothing and lighting circum-
stances, so the proposed approach uses pose esti-
mations to minimize these dependencies and create
a skeleton pose for the user executing squats. The
Ogata et al. (2019) concept is used to encode each
video’s skeletal positions in a distance matrix that rep-
resents the Euclidean distance between key points. In
order to classify the mistake in the performed squat,
the computed distance matrix of each video is used as
an input to a convolution neural network described in
section 4.2.
Various publicly accessible benchmark datasets
are used in addition to our dataset. Transfer learn-
ing is applied across various datasets to evaluate our
system’s robustness to various setups and configura-
tions while also decreasing the computing resources
needed for end-to-end training. Our technique can run
in real-time, so it may be embedded in mobile devices
and provide immediate feedback to users while they
execute squat workouts. The following are our main
contributions:
• Expanding the work of Fayez et al. (2022) by con-
centrating on the visual data acquired from partic-
ipants performing squats with the goal of increas-
ing the amount of video samples and creating suit-
able annotations in order to use the dataset for dif-
ferent levels of squat evaluation.
• Using the collected dataset to accurately classify
the squat workout error.
• Operating and validating transfer learning for dif-
ferent squat classification models across several
datasets. Review activity recognition and squat
workout evaluation.
The paper is organized as follows: Section 1 is
an introduction. Section 2 describes the related work
in pose estimation, activity recognition, and exer-
cise assessment. Section 3 describes the collected
dataset. Section 4 introduces the proposed approach
and deep neural network architecture. The experi-
mental work done to measure the model performance
on the EJUST-SQUAT-21 Dataset and the utilization
of transfer learning using different datasets is detailed
in section 5. Section 6 summarizes the achieved re-
sults of the performed experiments. Finally, Section 7
concludes the paper by referring to future research di-
rections that may be pursued.
2 RELATED WORK
2.1 Pose Estimation
Many tracks of research in activity recognition and
exercise evaluation rely on the skeleton pose of the
person as input to the model to avoid any dependen-
cies on human clothes, lighting conditions, or back-
ground. Hence, the effectiveness of classification de-
pends on the extracted skeletal pose. As a result, it
is critical to utilize a very precise and reliable pose
estimate approach.
There are many 2d and 3d pose estimations in the
literature. OpenPose (Cao, Hidalgo, Simon, Wei,
& Sheikh, 2019) is a powerful 2d pose estimation
method. The 2d keypoints locations extracted by
OpenPose can be utilized to generate 3d pose esti-
mates (Martinez, Hossain, Romero, & Little, 2017).
In addition, the 3d Pose estimates can be generated
using only monocular RGB camera (Mehta et al.,
2017; Popa, Zanfir, & Sminchisescu, 2017). More-
over, the shape and 3d pose estimates can be directly
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
80

extracted from raw images (Kanazawa, Black, Jacobs,
& Malik, 2018a). Bazarevsky et al. (2020) pro-
posed BlazePose 3d pose estimation which generate
33 keypoints in real-time. The BlazePose model con-
sists of an encoder-decoder network for heatmaps and
an encoder network to regress the keypoints coordi-
nates. The heatmap branch is only used during train-
ing which makes the model inference time small. The
model is trained on a large collected dataset for fitness
exercises. It outperforms OpenPose (Cao et al., 2019)
pose estimation in terms of accuracy and speed.
2.2 Activity Recognition based on Pose
Estimation
The action recognition task is inextricably linked to
pose estimation. Many researchers used posture esti-
mation to improve activity identification accuracy and
vice versa. Using a spatial-temporal And-Or graph
model, Nie, Xiong, and Zhu (2015) developed an
approach that integrates the classification of the per-
formed action with the estimate of body parts’ loca-
tions while doing that activity. Their method outper-
formed previous works, confirming the strong rela-
tion between pose estimation and action recognition.
Iqbal, Garbade, and Gall (2017) proposed a pictorial
structure model for pose estimation and action classi-
fication. By starting with uniform action prior, they
used the pose estimated in each frame to update the
prior, then utilized the updated prior for generating
refined poses.
Posture-based Convolution Neural Network de-
scriptors (P-CNN) were suggested by Ch
´
eron, Laptev,
and Schmid (2015) for action recognition, and they
used pose estimation. Patches of human body parts, as
well as their optical flow, are sent into P-CNN. RGB
CNN and flow CNN, respectively, are supplied with
them. After aggregation and normalization, the out-
put of each branch is coupled to construct a P-CNN
descriptor that is trained using linear SVM to catego-
rize the action done.
Str
¨
omb
¨
ack et al. (2020) introduced MM-Fit
Dataset, which consists of a collection of data from
different modalities such as inertial sensor data col-
lected from smartwatches, smartphones, and earbuds,
2d and 3d pose estimates from a Multiview RGB-D
camera. They trained each modality separately us-
ing a stacked convolution autoencoder to extract the
important features from each modality. For inertial
data, the autoencoder architecture consists of 1D con-
volution. For the collected videos, they used 3d pose
estimates from Martinez et al. (2017) and used cylin-
drical coordinates as suggested by Ke, Bennamoun,
An, Sohel, and Boussaid (2017) to be input to the
autoencoder because it is less sensitive to the back-
ground and illumination variation. They arranged the
data of 3d pose estimation into 3d images. The au-
toencoder architecture used for the 3d pose estimates
employed 2d convolutions instead of 1d convolutions.
After training each unimodal, they stacked the la-
tent layer representation of each to train a fully con-
nected multimodal autoencoder. Then, the latent layer
of this latter autoencoder is used as input for fully
connected network to classify between 10 different
exercises, which are squats, lunges, bicep curls, sit
ups, pushups, and tricep extensions, dumbbell rows,
jumping jacks, dumbbell shoulder press, and lateral
shoulder raises. The whole architecture is trained
end-to-end to perform this classification. The pro-
posed model utilizes the 3d pose estimates convolu-
tion autoencoder branch in transfer learning between
the MM-Fit Dataset and EJUST-SQUAT-21 Dataset,
as described in Section 5.2.
2.3 Exercise Assessment
The main goal of our research is to classify squat ex-
ercise performance. One method is to use Kinect to
retrieve the key points of the subject’s skeleton stance
while executing squats, then compute the joint angles
and compare them to the standard using the program
proposed by Vybornyi, Rozaliev, and Orlova (2017).
This issue is closely related to the evaluation of physi-
cal rehabilitation. Liao et al. (2020) presented a deep
neural network model that takes as input a series of
skeletal joint positions recorded by the sensory sys-
tem for a person executing 10 workouts such as deep
squats. Sub-convolutional networks are used to han-
dle spatial information in joint displacement, while
recurrent layers are used to capture temporal relation-
ships. They used Gaussian Mixture Model (GMM)
log-likelihood as a performance metric. The network
outputs a prediction for the quality score of the per-
formed exercise.
To distinguish between squatting, standing, and
stopping, Hung, Liu, and Chang (2020) employed
a convolution neural network. Depth cameras and a
marker-based motion tracking system are used to cap-
ture the input data. The latter was utilized as a bench-
mark for determining classification accuracy. Ogata
et al. (2019) collected a dataset using single ordi-
nary camera; then keypoints were extracted using 3d
pose estimation (Kanazawa, Black, Jacobs, & Malik,
2018b). The extracted keypoints are used to compute
the distance matrix for each video where each col-
umn in the matrix captures the distance between key-
points in each frame. The distance matrix is consid-
ered as the input to the model architecture, which is
Analysis of the Squat Exercise from Visual Data
81

composed of multiple convolution layers and residual
blocks (He, Zhang, Ren, & Sun, 2016). The output
of the network is a softmax layer with 7 neurons cor-
responding to 7 different classes of squat error. The
proposed model uses the same architecture with some
modifications described in Section 4.2 to train our
model.
3 DATASETS
3.1 EJUST-SQUAT-21 Dataset
The EJUST-SQUAT-21 Dataset is an expansion of the
dataset collected in (Fayez et al., 2022). Their gath-
ered dataset is a bimodal dataset of 27 participants
executing squats utilizing both visual and inertial data
streaming. The majority of the respondents in the
sample are men, except the exception of 3 African
ladies, who are recorded while exercising for cultural
reasons. The respondents’ ages range from 18 to 25
years old. Except for the female recordings, which
were taken indoors at the gymnasium hall, most of
the data were obtained outdoor at the Egypt Japan
University of Science and Technology Campus. The
subjects were asked about their level in performing
squats, and their answers varied from beginners to ex-
perts. Each subject in the dataset was asked to wear 9
IMU sensors distributed among his body, and perform
squats around 6 times in two recording sessions with-
out any supervision to make the dataset representable
of the common mistakes that the subject may make
at home without the presence of a trainer. The differ-
ence between the recording sessions of the subject is
only in his direction with respect to the camera, either
facing the camera (frontal view) or side (lateral) view.
The camera used in the data collection is RGB mobile
camera.
The main objectives of the EJUST-SQUAT-21
Dataset are utilizing the visual data gathered (Fayez
et al., 2022) to increase the number of videos avail-
able for training a classification model and creating
relevant annotations for the videos so that they could
be used to assess the performed squat on various lev-
els. In order to fulfill the first objective, each video is
divided into many shorter ones, each including only
one squat repetition. This necessitates knowledge of
the start frame of each squat repetition, as well as the
original video’s cutting points. The subject is in a
standing posture at the start of each squat repetition.
As a result, his knee angles exceed 150 degrees. Cal-
culating the subject’s knee angle in each frame and
retrieving the frame numbers where the subject is in
a standing position, the model uses the extracted joint
locations of BlazePose (Bazarevsky et al., 2020) pose
estimation to calculate the knee angle. By represent-
ing each squat exercise in one video, the number of
videos in the dataset is increased, and their length is
made equal, 50 frames per video, to be suitable as
input to our model described in section 4. Figure 1
shows examples of EJUST-SQUAT-21 Dataset with
its annotation.
(a)
(b)
(c)
(d) (e)
(f)
Figure 1: (a) Good Squat. (b) Bad Squat (Heels move off
the ground). (c) Bad Squat (Hips are not parallel to the
ground). (d) Bad Squat (Distance between feet is less than
the distance between shoulders). (e) Bad Squat (Knees ex-
ceed feet and heels move off the ground). (f) Bad Squat
(Foot externally rotated and Inward knees).
Annotation of each video in the dataset is created
with the help of a professional trainer to clarify the
type of mistake(s), if any, in the performed squat.
Six common mistakes are discovered: less space be-
tween the feet than shoulders, knees beyond the feet,
heels off the ground, incorrect foot rotation, hips not
aligned with the ground, or inward knees.
In order to achieve our second objective, three dis-
tinct annotations are given for three different levels of
squat evaluations. First, EJUST-SQUAT-21 Dataset
videos are divided into two 2 classes: excellent squats
(no mistakes) and poor squats (at least one of the mis-
takes listed above). With this annotation, we are able
to test our model’s capacity to discriminate between
good and bad squats. Second, the videos are divided
into three 3 classes based on the degree of the subject
performing squats: beginner (doing squats with sev-
eral mistakes), intermediate (doing squats with one
minor mistake), and expert (squatting without any
mistakes). Third, the dataset is labeled to specify the
type of mistake made. The dataset has 7 different la-
bels, 6 for a bad squat and one for a good squat. These
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
82

different labels are shown in Table 1 with the num-
ber of videos in each label. There may be more than
one mistake in the squat exercise. Therefore, EJUST-
SQUAT-21 is a multi-label dataset. Table 2 shows
the number of videos with their corresponding multi-
label.
Table 1: Description of Labels in EJUST-SQUAT-21
Dataset.
Label Label Description Number of videos
1 Distance between feet is less than distance between shoulders 87
2 Knees exceed feet 98
3 Heels move off ground 78
4 Foot externally rotated 15
5 Hips are not parallel to the ground 139
6 Inward knees 54
7 Good 200
Table 2: Labels in EJUST-SQUAT-21 Dataset.
Label 1 Label 2 Label 3 Label 4 Label 5 Label 6 Label 7 Total number of Videos
0 0 0 0 0 0 1 200
0 0 0 0 0 1 0 32
0 0 0 0 1 0 0 100
0 0 0 0 1 1 0 17
0 0 0 1 0 0 0 10
0 0 0 1 0 1 0 5
0 1 0 0 0 0 0 8
0 1 1 0 0 0 0 56
0 1 1 0 1 0 0 22
1 0 0 0 0 0 0 75
1 1 0 0 0 0 0 12
3.2 More Datasets for More Efficiency
The effectiveness of the proposed approach is proven
by using three datasets. EJUST-SQUAT-21 Dataset,
Single Individual Dataset (Ogata et al., 2019), and
MM-Fit Dataset (Str
¨
omb
¨
ack et al., 2020), to measure
the effectiveness of transfer learning between them.
The Single Individual Dataset consists of a sin-
gle individual performing squat to order to make a
specific error. There are seven distinct classes in
the dataset, six of which are connected to bad squat
and one to good squat. Inward knees, round backs,
wrapped backs, upwards heads, shallowness, and
frontal knees are the six forms of squat errors.
The MM-Fit Dataset is a multimodal dataset for
single-person activity recognition. The modalities
used in the dataset are 2d and 3d pose estimates
from RGB-D camera and accelerator and gyroscope
from smartwatches, earbuds, and smartphones. The
subjects in the dataset performed 10 different exer-
cises: squats, sit-ups, lunges, sitting dumbbell shoul-
der press, bicep curls, push-ups, jumping jacks, stand-
ing dumbbell rows, dumbbell lateral shoulder raises,
and sitting overhead dumbbell triceps extensions.
4 PROPOSED APPROACH
The proposed method is based on the work presented
by Ogata et al. (2019). Figure 2 shows an overview
of the whole architecture. Given the video of the sub-
ject performing squats, the skeletal pose of the subject
is extracted for each frame using BlazePose pose esti-
mation (Bazarevsky et al., 2020). Using the keypoints
in the skeletal pose, a difference matrix representing
the Euclidean distance between each pair of joints in
each frame is computed. The difference matrix used
as an input to a convolution neural network that per-
forms a binary, trinary, or the seven classes. The aim
of classification is distinguishing between good and
bad squats, determining the level of the subject per-
forming squats, whether it is beginner, intermediate
or advanced, or specifying the mistake(s) in the per-
formed squats.
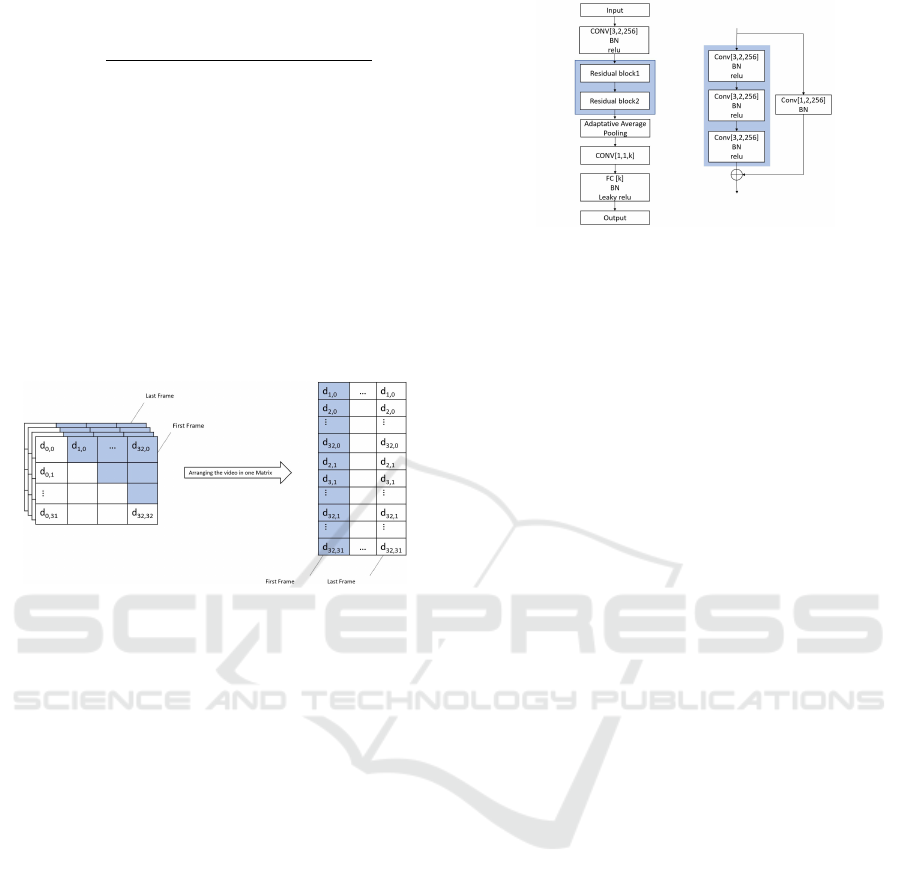
Figure 2: Overview of the whole architecture.
4.1 3D Pose Estimation and Difference
Matrix
The pose estimation technique described in
BlazePose (Bazarevsky et al., 2020) is used. It
generates 33 keypoints for a single person in
real-time. Figure 3 shows the generated keypoints.
Figure 3: Keypoints generated by BlazePose (Bazarevsky
et al., 2020).
For each frame, BlazePose pose estimation gener-
ates 33 keypoints, they are arranged into a difference
matrix where each element d
i, j
equals the Euclidean
Analysis of the Squat Exercise from Visual Data
83
distance between joint i and joint j.
d
i, j
=
2
q
(x
i
− x
j
)
2
+ (y
i
− y
j
)
2
+ (z
i
− z
j
)
2
(1)
So, each frame will be represented in a 33 × 33
matrix. The unique elements in each matrix can be
found in its upper triangular or lower triangular, so
there are only (33 ∗ 32)/2 = 528 unique elements in
each matrix. By flattening (vectorizing) the unique el-
ements of each matrix in a column vector and stack-
ing them together, the final distance matrix for a video
will have dimensions of 528 ×N, where N is the num-
ber of frames in a video. Figure 4 shows the con-
struction of the difference matrix where the shaded
elements are the unique elements in each frame.
Figure 4: Difference Matrix.
4.2 Network Architecture
The same architecture shown in (Ogata et al., 2019) is
used with two modifications. First, only two resid-
ual blocks instead of four blocks to reduce overfit-
ting. Second, one additional fully connected layer
followed by batch normalization and LeakyReLU ac-
tivation before the output layer. The dimensions of
the fully connected and output layers depend on the
classification task of the performed squat. In the case
of training on EJUST-SQUAT-21 Dataset, two neu-
rons are used in these layers to classify the performed
squats into good or bad. Three neurons are used to
classify the performed squats into beginner, interme-
diate, and expert. Seven neurons are used to deter-
mine the mistakes in the performed squats. For any
other dataset, Seven neurons are used in these layers.
5 EXPERIMENTS
The network architecture shown in Figure 5 is used
and AdaDelta optimizer as in (Ogata et al., 2019) with
a batch size of 32. Various experiments are performed
utilizing multiple datasets.
Figure 5: Network architecture where k represents the num-
ber of classes which can be 2, 3, or 7 based on the goal of
classification.
5.1 EJUST-SQUAT-21 Dataset/Single
Individual Dataset
To measure the performance on EJUST-SQUAT-21,
four experiments are implemented. The first three
experiments perform end-to-end training on EJUST-
SQUAT-21 Dataset to perform binary, trinary, and
multi-label classification, respectively. The goal of
the fourth experiment is to measure the effect of trans-
fer learning from the Single Individual Dataset to
EJUST-SQUAT-21 Dataset. A pretrained model on
the Single Individual Dataset (Ogata et al., 2019),
then used the final weights as initialization for train-
ing the model on EJUST-SQUAT-21 Dataset to per-
form multi-label classification.
Two experiments are performed to measure the
performance on the Single Individual Dataset. In the
first experiment, end-to-end training is implemented.
In the second experiment, a pretrained model based
on EJUST-SQUAT-21 Dataset is used. As an initial-
ization, the final weights are utilized for training/fine-
tuning the model on the Single Individual Dataset to
measure the effect of transfer learning from EJUST-
SQUAT-21 Dataset to the Single Individual Dataset.
5.2 MM-fit/EJUST-SQUAT-21/Single
Individual Datasets
Another experiment is performed utilizing the MM-
Fit Dataset. As mentioned in section 2.2, the MM-Fit
Dataset is a multimodal dataset where each modal-
ity is trained separately using an autoencoder, then
stacked together and trained end-to-end for activity
recognition. The model is implemented based on the
training of the 3d pose estimation modality using au-
toencoder. The architecture of the autoencoder used
in (Str
¨
omb
¨
ack et al., 2020) is shown in Figure 6a.
the autoencoder is trained on the 3d pose estima-
tion modality in the MM-Fit Dataset for 25 epochs
to extract the features that distinguish between differ-
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
84
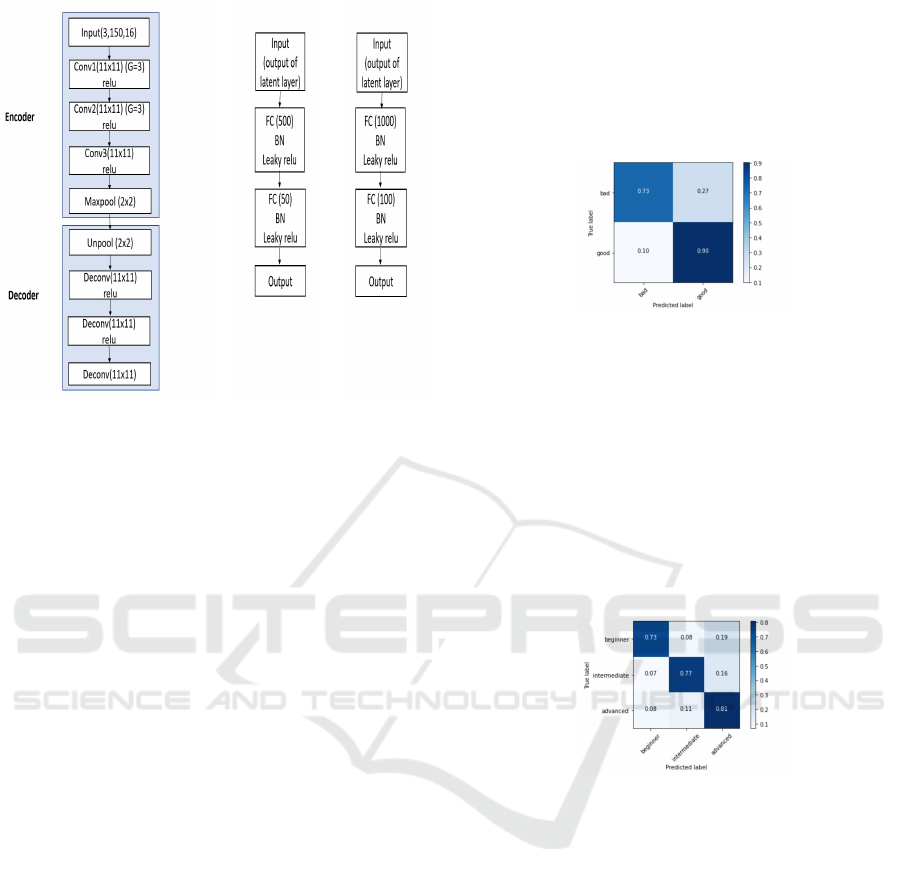
(a)
(b)
(c)
Figure 6: (a) MM-Fit Architecture. (b) EJUST-SQUAT-21
Dataset Classifier. (c) Single Individual Dataset Classifier.
ent exercises. Then, the encoder part of the network
is used to extract the features in EJUST-SQUAT-21
Dataset, as well as the Single Individual Dataset sep-
arately without training. For each dataset, the output
of the latent layer is passed to a fully connected neural
network to classify the mistake in the squat exercise
into seven different categories. In the case of EJUST-
SQUAT-21 Dataset, there may be more than one mis-
take in the exercise, hence, multi-label. Whereas
in the Single Individual Dataset (Ogata et al., 2019)
there is only one mistake in each video or no mistake
(good squat); hence, single label. The classification
performance of the EJUST-SQUAT-21 Dataset using
exact match ratio, while using the accuracy for the
Single Individual Dataset.
6 RESULTS
The classification of squats in EJUST-SQUAT-21
Dataset (two classes): good or bad, The model train-
ing is described in section 4.2 with 2 neurons in the
last two layers for 100 epochs (manually fixed). In
order to overcome the problem of imbalanced data, a
weighted cost function is used to penalize the error in
classifying bad squats twice as much as the error in
classifying good squats. The model achieved 96% ac-
curacy using 10-fold cross-validation. Figure 7 shows
the resulted confusion matrix from the addition of the
confusion matrix of each fold, then normalizing the
final matrix.
The confusion matrix shows that most misclas-
sification is due to misclassifying the bad squat to
good squat. That is because the number of good squat
videos in the dataset is larger than the number of bad
squat videos. Also, bad squat videos vary much de-
pending on the type and number of mistakes, so the
model can easily classify the bad squat with one mis-
take as a good one.
Figure 7: Normalized confusion matrix for squat classifica-
tion into good or bad squat.
To classify the player’s level into beginner, inter-
mediate, and expert, the experiment mentioned above
is repeated on EJUST-SQUAT-21 Dataset with 3 soft-
max neurons in the last layer achieving 92% accuracy.
Figure 8 shows the normalized confusion matrix. The
confusion matrix shows that the model is more con-
fident in predicting the advanced class than the inter-
mediate and beginner class because both classes con-
tain significant variations of the type and number of
errors.
Figure 8: Normalized confusion matrix for squat player’s
level classification into beginner, intermediate, and expert.
Training the network architecture shown in Fig-
ure 5 using EJUST-SQUAT-21 Dataset for 83 epochs
with early stopping criterion to classify the type of
mistake(s) in squat, if any, the model achieved 94%
accuracy using 5-fold stratified cross-validation. The
stratified cross-validation was used to take into ac-
count the imbalanced dataset. The ratio of exact
match is used to measure the model’s accuracy, con-
sidering the prediction is correct only if all the labels
match the actual target. Hamming loss is used to as-
sess the performance of our model. The average loss
is 0.015.
For the rest of the paper, EJUST-SQUAT-21 Dataset
is used with multi-label annotation to classify the type
of the mistake in squats unless otherwise mentioned.
In addition, the number of epochs used for training is
determined based on early stopping criterion except
otherwise mentioning.
Analysis of the Squat Exercise from Visual Data
85

Pretraining the model on the Single Individual
Dataset, then fine-tuning on EJUST-SQUAT-21 yields
an accuracy of 90% in only 38 epochs compared to an
accuracy of 94% in case of end-to-end training for 83
epochs.
Whereas pretraining on the MM-Fit Dataset
achieves 88% accuracy in 200 epochs (manually
fixed) using the following approach. First, the au-
toencoder architecture shown in Figure 6a is used to
pretrain the 3d pose estimation modality in MM-Fit
Dataset (Str
¨
omb
¨
ack et al., 2020). Second, the en-
coder part of the network is used as a feature extractor
for EJUST-SQUAT-21. Third, the latent layer output
is passed to the classification network shown in Fig-
ure 6b. Table 3 summarizes the results achieved on
EJUST-SQUAT-21 Dataset.
In comparison to end-to-end training, pretraining
on the Single Individual Dataset has a significant im-
pact, as it allows the EJUST-SQUAT-21 Dataset to
reach its best accuracy in less than half the number of
epochs with a loss of just 4% of accuracy. The high
similarity between these datasets is the reason behind
this. They are both for squat evaluation and classi-
fication into 6 types of mistakes or no mistakes, with
some common errors in the datasets like inward knees
and frontal knees.
Compared to the significant effect of pretraining
on Single individual Dataset, pretraining the model
on MM-Fit Dataset has a poor effect on the model’s
accuracy because MM-Fit Dataset is specified for ex-
ercise recognition in general, not particularly squat.
The task of classifying Single Individual Dataset
into 7 disjoint classes that represent the type of mis-
take, end-to-end training is implemented using the
model architecture shown in Figure 5. The dataset
is divided into 60% training, 10% validation, and
30% test, The model achieved 80% accuracy in 60
epochs. Whereas the accuracy achieved when divid-
ing the dataset into 80% training, 10% validation, and
10% test is 87%. The results show that the model
needs more training data to reach higher accuracy.
The Single Individual Dataset is used for the rest
of the experiments, with 80% − 10% − 10% split.
When a pretraining process is applied to the model
shown in Figure 5 on EJUST-SQUAT-21, then fine-
tuning on the Single Individual Dataset (Ogata et al.,
2019), the model achieved an accuracy of 80.2% in
54 epochs compared to 87% accuracy in case of end-
to-end training for 60 epochs.
The results show that transfer learning from Single
Individual Dataset to EJUST-SQUAT-21 Dataset has
less impact on accuracy compared to transfer learning
from EJUST-SQUAT-21 Dataset to Single Individual
Dataset. The reason for that is that the classification
task for EJUST-SQUAT-21 Dataset is more complex
since it is multi-label. Hence, pretraining the model
on it increases its ability to perform multi-class clas-
sification on the Single Individual Dataset.
The model achieved 73% accuracy when train-
ing a simple fully connected neural network shown
in Figure6a on the extracted features from the Sin-
gle Individual Dataset from the encoder part of the
autoencoder architecture shown in Figure 6c after be-
ing trained on the MM-Fit Dataset (Str
¨
omb
¨
ack et al.,
2020).
The above results are summarized in Table 3.
7 CONCLUSIONS and FUTURE
WORK
In this paper, utilization of the visual part of the
dataset collected in (Fayez et al., 2022) is proposed, in
addition to increasing the data samples and providing
proper annotation for various levels of squat assess-
ment. The results introduced show the effectiveness
of using 3d pose estimation as input to the model.
The deep model architecture described in (Ogata et
al., 2019) is used with major modifications to increase
the model generalizability. The approach is tested
on two squat assessment datasets: EJUST-SQUAT-21,
and the Single Individual Dataset. The results show
that the model can achieve remarkable accuracy, even
with stringent performance metrics over multi-label
outputs. The effect of transfer learning was inves-
tigated in the experiments by pretraining the model
on one dataset and then fine-tuning it on the other.
Transfer learning between both datasets saves train-
ing time while slightly lowering test accuracy, accord-
ing to the findings. The data collecting process, also
shows promise in the difficulty of transferring mod-
els across various settings and configurations. The
efficiency of the transfer learning approach is com-
pared across activity recognition datasets such as the
MM-Fit Dataset and squat assessment datasets, like
the EJUST-SQUAT-21 Dataset and the Single Individ-
ual dataset.
In the future, more data can be collected, includ-
ing more workout exercises, as well as achieving di-
versity in the subjects participating in the data col-
lection process so that they span a wide range of
ages and gender. Such exercises need to be anno-
tated in terms of correctness and the types of mis-
takes incurred while performing them. Disentangle-
ment (Zhang, Tran, Liu, & Liu, 2020) will be used
to extract the relevant features in each performed ex-
ercise and make the system more robust to variations
in the steady skeletal pose of different subjects in the
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
86
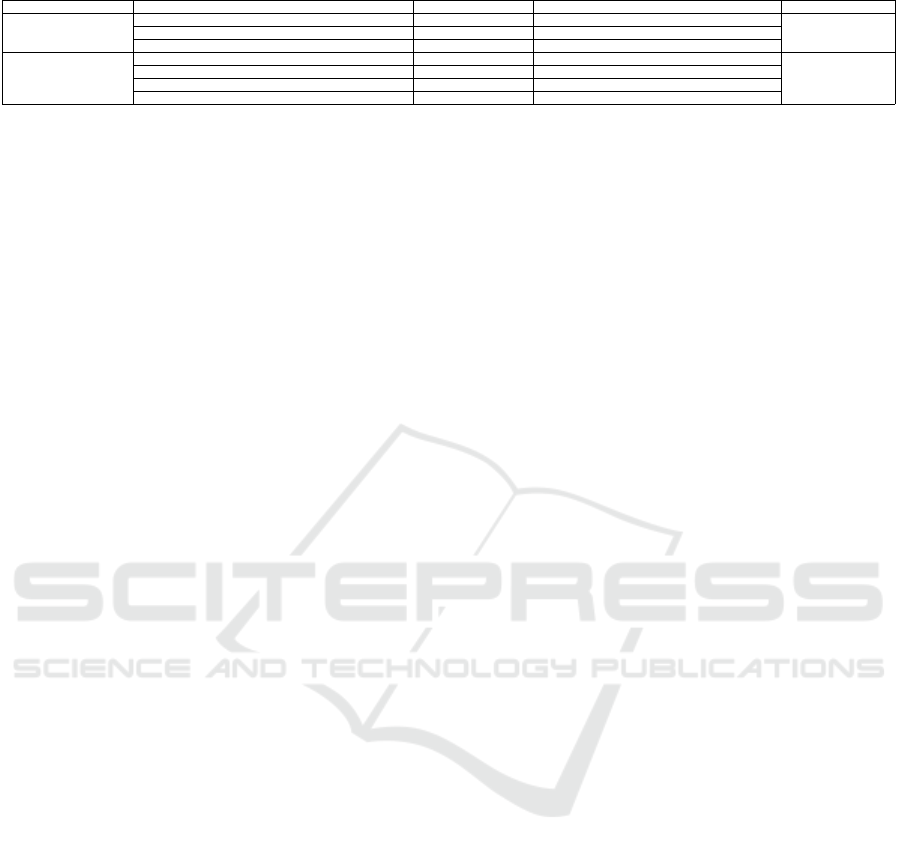
Table 3: Results on EJUST-SQUAT-21 Dataset and Single Individual Dataset.
Training Dataset Pretraining Dataset Number of Epochs Accuracy Type of classification
EJUST-SQUAT-21 dataset
- 83 (end-to-end training) 94% (5-Fold Cross Validation)
multi-label multi-classSingle Individual Dataset for 60 epochs (Ogata et al., 2019) 38 (fine-tuning) 90.3% (5-Fold Cross Validation)
MM-Fit Dataset (Str
¨
omb
¨
ack et al., 2020) for 25 epochs 200 (fine-tuning) 88% (5-Fold Cross Validation)
Single Individual Dataset
- 60 (end-to-end training) 87% (80%-10%-10% training-validation-test split)
multi-class
- 60 (end-to-end training) 80% (60%-10%-30% training-validation-test split)
EJUST-SQUAT-21 for 83 epochs 54 (fine-tuning) 80.2% (80%-10%-10% training-validation-test split)
MM-Fit Dataset (Str
¨
omb
¨
ack et al., 2020) for 25 epochs 120 (fine-tuning) 73% (80%-10%-10% training-validation-test split)
dataset. A wide range of tasks will need to be done,
including the recognition of the exercise, the level of
performance, the mistakes done, etc. Transfer learn-
ing will play a major role as well in the effectiveness
of developing such a virtual coaching system.
ACKNOWLEDGEMENTS
This work is funded by the Information Technol-
ogy Industry Development Agency (ITIDA), Infor-
mation Technology Academia Collaboration (ITAC)
Program, Egypt – Grant Number (ARP2020.R29.2
- VCOACH: Virtual Coaching for Indoors and Out-
doors Sporting).
REFERENCES
Abou Elmagd, M. (2016). Benefits, need and importance
of daily exercise. Int. J. Phys. Educ. Sports Health,
3(5), 22–27.
Bazarevsky, V., Grishchenko, I., Raveendran, K., Zhu, T.,
Zhang, F., & Grundmann, M. (2020). Blazepose:
On-device real-time body pose tracking. arXiv
preprint arXiv:2006.10204.
Bernardino, A., Vismara, C., i Badia, S. B., Gouveia,
´
E.,
Baptista, F., Carnide, F., . . . Gamboa, H. (2016).
A dataset for the automatic assessment of func-
tional senior fitness tests using kinect and physiolog-
ical sensors. In 2016 1st international conference
on technology and innovation in sports, health and
wellbeing (tishw) (pp. 1–6).
Cao, Z., Hidalgo, G., Simon, T., Wei, S.-E., & Sheikh, Y.
(2019). Openpose: realtime multi-person 2d pose
estimation using part affinity fields. IEEE transac-
tions on pattern analysis and machine intelligence,
43(1), 172–186.
Capecci, M., Ceravolo, M. G., Ferracuti, F., Iarlori, S.,
Monteri
`
u, A., Romeo, L., & Verdini, F. (2019). The
kimore dataset: Kinematic assessment of movement
and clinical scores for remote monitoring of physical
rehabilitation. IEEE Transactions on Neural Systems
and Rehabilitation Engineering, 27(7), 1436–1448.
Ch
´
eron, G., Laptev, I., & Schmid, C. (2015). P-cnn:
Pose-based cnn features for action recognition. In
Proceedings of the ieee international conference on
computer vision (pp. 3218–3226).
Fayez, A., Sharshar, A., Hesham, A., Eldifrawi, I., & Go-
maa, W. (2022). Vals: A leading visual and inertial
dataset of squats. In 2022 16th international con-
ference on ubiquitous information management and
communication (imcom) (pp. 1–8).
F
¨
uz
´
eki, E., Groneberg, D. A., & Banzer, W. (2020). Physi-
cal activity during covid-19 induced lockdown: rec-
ommendations. Journal of Occupational Medicine
and Toxicology, 15(1), 1–5.
Garber, C., Blissmer, B., Deschenes, M., Franklin, B., Lam-
onte, M., Lee, I.-M., . . . Swain, D. (2011, 07). Quan-
tity and quality of exercise for developing and main-
taining cardiorespiratory, musculoskeletal, and neu-
romotor fitness in apparently healthy adults: Guid-
ance for prescribing exercise. Medicine and science
in sports and exercise, 43, 1334-59. doi: 10.1249/
MSS.0b013e318213fefb
He, K., Zhang, X., Ren, S., & Sun, J. (2016). Deep residual
learning for image recognition. In Proceedings of
the ieee conference on computer vision and pattern
recognition (pp. 770–778).
Hung, J.-S., Liu, P.-L., & Chang, C.-C. (2020). A deep
learning-based approach for human posture classifi-
cation. Proceedings of the 2020 2nd International
Conference on Management Science and Industrial
Engineering.
Iqbal, U., Garbade, M., & Gall, J. (2017). Pose for action -
action for pose. 2017 12th IEEE International Con-
ference on Automatic Face & Gesture Recognition
(FG 2017), 438-445.
Kanazawa, A., Black, M. J., Jacobs, D. W., & Malik, J.
(2018a). End-to-end recovery of human shape and
pose. In Proceedings of the ieee conference on
computer vision and pattern recognition (pp. 7122–
7131).
Kanazawa, A., Black, M. J., Jacobs, D. W., & Malik, J.
(2018b). End-to-end recovery of human shape and
pose. 2018 IEEE/CVF Conference on Computer Vi-
sion and Pattern Recognition, 7122-7131.
Kaur, H., Singh, T., Arya, Y. K., & Mittal, S. (2020). Phys-
ical fitness and exercise during the covid-19 pan-
demic: a qualitative enquiry. Frontiers in psychol-
ogy, 11, 2943.
Ke, Q., Bennamoun, M., An, S., Sohel, F., & Boussaid, F.
(2017). A new representation of skeleton sequences
for 3d action recognition. In Proceedings of the ieee
conference on computer vision and pattern recogni-
tion (pp. 3288–3297).
Kuehne, H., Jhuang, H., Garrote, E., Poggio, T., & Serre,
T. (2011). Hmdb: a large video database for human
motion recognition. In 2011 international confer-
ence on computer vision (pp. 2556–2563).
Liao, Y., Vakanski, A., & Xian, M. (2020, Feb.). A deep
learning framework for assessing physical rehabilita-
tion exercises. IEEE Transactions on Neural Systems
and Rehabilitation Engineering, 28(2), 468-477.
Lorenzetti, S., Ostermann, M., Zeidler, F., Zimmer, P.,
Analysis of the Squat Exercise from Visual Data
87

Jentsch, L., List, R., . . . Schellenberg, F. (2018).
How to squat? effects of various stance widths, foot
placement angles and level of experience on knee,
hip and trunk motion and loading. BMC Sports Sci-
ence, Medicine and Rehabilitation, 10(1), 1–11.
Martinez, J., Hossain, R., Romero, J., & Little, J. J. (2017).
A simple yet effective baseline for 3d human pose
estimation. In Proceedings of the ieee international
conference on computer vision (pp. 2640–2649).
Mehta, D., Rhodin, H., Casas, D., Fua, P., Sotnychenko,
O., Xu, W., & Theobalt, C. (2017). Monocular 3d
human pose estimation in the wild using improved
cnn supervision. In 2017 international conference
on 3d vision (3dv) (pp. 506–516).
Nie, B. X., Xiong, C., & Zhu, S.-C. (2015). Joint ac-
tion recognition and pose estimation from video. In
2015 ieee conference on computer vision and pattern
recognition (cvpr) (p. 1293-1301). doi: 10.1109/
CVPR.2015.7298734
Ogata, R., Simo-Serra, E., Iizuka, S., & Ishikawa, H.
(2019). Temporal distance matrices for squat classi-
fication. In Proceedings of the ieee/cvf conference on
computer vision and pattern recognition workshops
(pp. 0–0).
Ohuruogu, B. (2016). The contributions of physical activity
and fitness to optimal health and wellness. Journal
of Education and Practice, 7, 123-128.
Popa, A.-I., Zanfir, M., & Sminchisescu, C. (2017). Deep
multitask architecture for integrated 2d and 3d hu-
man sensing. In Proceedings of the ieee confer-
ence on computer vision and pattern recognition (pp.
6289–6298).
Reiner, M., Niermann, C., Jekauc, D., & Woll, A. (2013).
Long-term health benefits of physical activity–a sys-
tematic review of longitudinal studies. BMC public
health, 13(1), 1–9.
Schuch, F. B., Vancampfort, D., Richards, J., Rosenbaum,
S., Ward, P. B., & Stubbs, B. (2016). Exercise as a
treatment for depression: a meta-analysis adjusting
for publication bias. Journal of psychiatric research,
77, 42–51.
Soomro, K., Zamir, A. R., & Shah, M. (2012). Ucf101: A
dataset of 101 human actions classes from videos in
the wild. arXiv preprint arXiv:1212.0402.
Str
¨
omb
¨
ack, D., Huang, S., & Radu, V. (2020). Mm-
fit: Multimodal deep learning for automatic exercise
logging across sensing devices. Proceedings of the
ACM on Interactive, Mobile, Wearable and Ubiqui-
tous Technologies, 4(4), 1–22.
Vybornyi, A. I., Rozaliev, V. L., & Orlova, Y. A. (2017).
Controlling the correctness of physical exercises
performance. In Iv international research confer-
ence” information technologies in science, manage-
ment, social sphere and medicine”(itsmssm 2017)
(pp. 233–237).
Zhang, Z., Tran, L., Liu, F., & Liu, X. (2020). On learn-
ing disentangled representations for gait recognition.
IEEE Transactions on Pattern Analysis and Machine
Intelligence.
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
88
