
Smart Autonomous Part Displacement System based on Point Cloud
Segmentation
Eber Lawrence Souza Gouveia
1a
, Rupal Srivastava
1b
, Maulshree Singh
1c
, Sean Lyons
1d
,
Eddie Armstrong
2e
and Declan Devine
1f
1
Materials Research Institute, Technological University of the Shannon: Midlands Midwest, Athlone, Ireland
2
Johnson & Johnson, Advanced Technology Centre, University of Limerick, Limerick, Ireland
Keywords: Manufacturing Line, Smart System, Pick and Place Task, Computational Vision, Robot Operating System.
Abstract: Robotic arms are widely used in manufacturing lines to automate the manipulation of products, providing
many advantages, such as increasing production and minimizing labour costs. However, most robotic arms
operate in a controlled environment, executing predefined movements. Such a feature prevents the robot arm
from working in an environment where multiple product types are in different placements. In this way, this
concept paper describes the development of a smart robotic system capable of performing an autonomous
pick-and-place task of injected moulded parts from the first conveyor belt to the next, based on its spatial data
obtained from a 3D scanner. After obtaining the digital point cloud from the moulded part, the PointNet deep
learning model was used to segment and then extract the spatial position of its sprue, which is one of the
common structures of any moulded part. Finally, the robotic arm combined with its end-effector can pick up
these parts regardless of their shape, orientation, and size. The system proposed is composed of three
components, i.e., the IRB 1200 robotic arm from ABB, the PhoXi 3D Scanner from Photoneo, and the two-
finger gripper PB-0013 from Gimatic. Moreover, all system components were interconnected using Robot
Operating System as middleware. This concept paper discusses the setup and plan for the same.
1 INTRODUCTION
In recent years Industry 4.0 concept has become
popular, and many industries are changing their
factory process to adapt to this new concept. A few
years ago, terms such as Artificial Intelligence (AI),
robotics, cloud, Internet of Things (IoT), smart
factory were unknown to a large part of society.
However, due to the advances in technology, these
terms have become part of our activities of daily
living (Lasi et al., 2014; Oztemel & Gursev, 2020).
Such a term is also known as the fourth industrial
revolution, considering that it was a breakthrough in
industrial manufacturing (Lasi et al., 2014).
Industry 4.0 raises new meaningful concepts to
the industry process, making it more automated,
a
https://orcid.org/0000-0003-3766-2043
b
https://orcid.org/0000-0002-3127-4982
c
https://orcid.org/0000-0003-4788-1231
d
https://orcid.org/0000-0003-1998-070X
e
https://orcid.org/0000-0001-9396-210X
f
https://orcid.org/0000-0002-1364-5583
intelligent, and interconnected. Such features are
possible due to terms mentioned before, such as IoT,
smart factory, and cloud manufacturing. These
concepts enable various parts of a production line to
be interconnected controlled virtually (Ghobakhloo,
2020; Roblek et al., 2016). Moreover, industry 4.0
seeks to achieve new advantages compared to the
previous concepts, e.g., creation of new business
models, integrated and real-time operations, cost
reduction, energy savings, optimization of natural
resources, and reduction of errors (Bai et al., 2020;
Maskuriy et al., 2019; Oláh et al., 2020). In this way,
industry 4.0 brings opportunities to the current
business model for large and small companies.
Industrial robots are other elements that play a
fundamental role in Industry 4.0. More specifically,
Gouveia, E., Srivastava, R., Singh, M., Lyons, S., Armstrong, E. and Devine, D.
Smart Autonomous Part Displacement System based on Point Cloud Segmentation.
DOI: 10.5220/0011353100003271
In Proceedings of the 19th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2022), pages 549-554
ISBN: 978-989-758-585-2; ISSN: 2184-2809
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
549
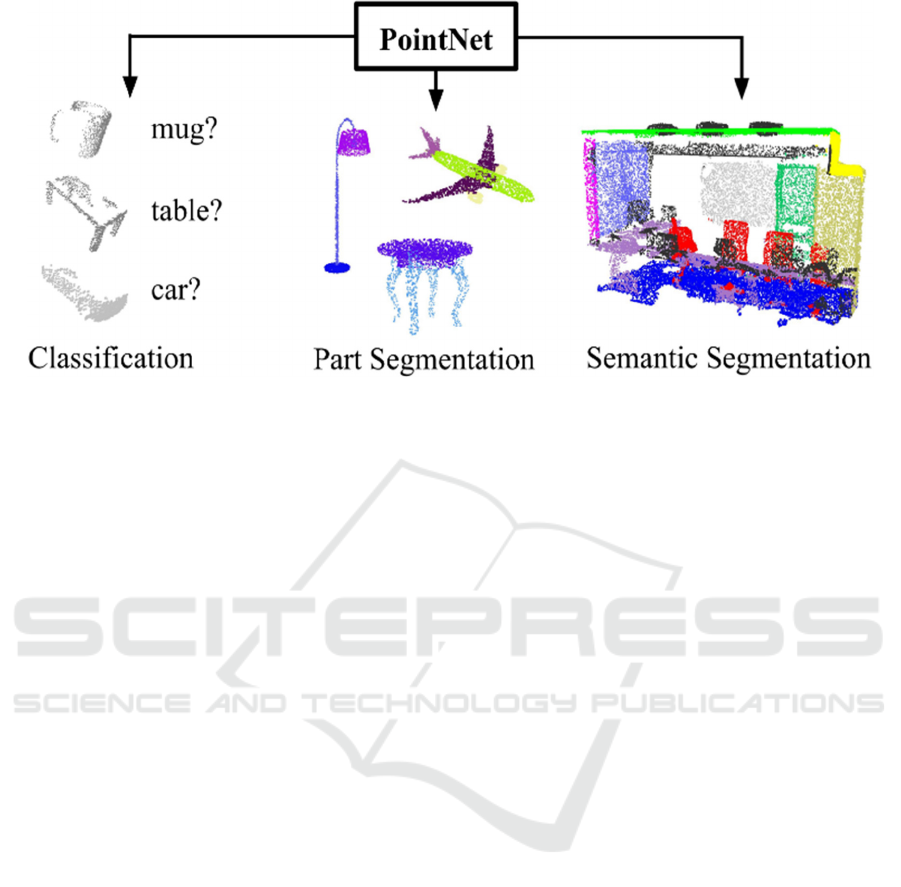
Figure 1: Applications of PointNet. Source: (Qi et al., 2016).
when it comes to pick-and-place tasks in
manufacturing lines, our focus is on robotic arms.
Robotic arms are widely used in factories to automate
the manipulation of products, providing many
advantages, such as increasing production and
minimizing labour costs (Borkar, 2017; Li et al.,
2018; Prabhakar et al., 2021; Ramanathan S et al.,
2020). Although they have been present in
manufacturing lines since the third industrial
revolution, robotic arms are even more robust in
Industry 4.0, becoming more intelligent, productive,
flexible, versatile, safer, and collaborative (Bahrin et
al., 2016). Therefore, robotic arms are becoming a
key component in the operation of smart factories as
they can complete cooperative tasks intelligently
(Ruchiand Goel & Pooja Gupta, 2020).
Pick and place robots have been present in
factories for decades due to their precision, high
speed, and cost‐effectiveness in repetitive tasks
compared to manual workers (Chettibi et al., 2004;
Perumaal & Jawahar, 2013). When incorporated with
Industry 4.0 features, these robots bring many
advantages for managing product manufacturing
lines, e.g., creating autonomous production lines.
However, most robotic arms present in the current
factories operate in a controlled environment,
executing predefined, repetitive movements and are
frequently referred to as ‘pick and place’ robots due
to their limited functionality. Such a feature prevents
the robot arm from working in conditions where
exists multiple product types in different placements.
Hence, this presented factory limitation provides the
opportunity for developing more intelligent
manufacturing line control systems.
In this article, we present the concept of a novel
smart robotic system capable of performing an
autonomous identification and displacement of
injected moulded parts based on their point cloud
obtained from a 3D scanner. After getting the point
cloud from the moulded part, the PointNet deep
learning model is used to extract the coordinates of
the part sprue, which is the general structure of any
moulded part. Finally, the robotic arm combined with
its end-effector must pick up this part regardless of its
shape, orientation, and size. The proposed system is
part of a manufacturing line, and it is composed of
three main components, i.e., the IRB 1200 robotic
arm from ABB (ABB, n.d.), the PhoXi 3D Scanner
from Photoneo (Photoneo, n.d.), and the PB-0013
pneumatic two-finger gripper from Gimatic (REF).
Moreover, all system components were
interconnected using Robot Operating System (ROS)
as middleware (Willow Garage et al., n.d.).
2 POINTNET NEURAL
NETWORK
PointNet is a neural network approach that deals with
point clouds. Unlike other methods that require image
grids or 3D voxels, the PointNet neural network
directly consumes point clouds, i.e., turning the
process highly efficient and effective (Qi et al., 2016).
Figure 1 shows the three possible applications of the
PointNet: classification, part segmentation and
semantic segmentation.
Point clouds have many applications, such as the
representation of the physical environment inside a
virtual one through the data obtained from sensors.
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
550

Such application is widely seen in autonomous
systems that constantly need information about the
physical environment.
With the substantial increase in autonomous
systems, it becomes crucial to understand how to
work with point clouds. Therefore, PointNet neural
network has been a breakthrough in computer vision
due to its broad number of applications in many areas,
such as robotics and autonomous systems.
3 AUTONOMOUS PART
IDENTIFICATION AND
DISPLACEMENT SYSTEM
SETUP
As conveyed before, the autonomous part
displacement step of the manufacturing line is
composed of three components which are the robotic
arm, the pneumatic gripper, and the 3D scanner.
These components and their key features are
described in the sections below. Furthermore, the
IRC5 controller is another fundamental part of this
system once it controls external sensors and devices
through its I/O ports. Thus, it is also described with
more details in the next section.
Figure 2: Pick-and-place step components assembled in the
manufacturing line. (A) ABB 1200 robotic arm, (B) PhoXi
3D scanner, and (C) PB-0013 pneumatic two-finger
gripper.
3.1 IRB1200 Robotic Arm (A)
The IRB 1200 - 5/90 is the robotic arm used in the
presented manufacturing line. This robot has a reach
of 700 mm and can carry up to 5 kg of payload. Such
resources make this robotic arm ideal for a wide range
of industrial applications, including the proposed pick
and place task of moulded parts described in this
article.
3.2 PhoXi 3D Scanner (B)
The PhoXi S 3D Scanner from Photoneo is the
component designated for adding computer vision to
the manufacturing line, i.e., getting the point cloud of
the moulded parts. Such a scanner is ideal for high-
resolution, high-precision scanning of static scenes.
Its structured light projection technique provides
output in the form of point clouds for quick location
of any aimed object part.
3.3 PB-0013 Pneumatic Gripper (C)
The Gimatic PB-0013 is the End-Effector which is
attached to the robotic arm. Since it is a pneumatic
gripper, a compressor combined with a 3/2-way valve
is responsible for its actuation. Moreover, this gripper
is based on spring return, being normally open with a
closing grip torque of 80 N.cm at 6 bar pressure for
each jaw.
3.4 IRC5 Compact Controller
The IRC5 compact controller is the core component
of the presented system since it controls the I/O ports
and connects the robotic arm to ROS scripts. The
IRC5 compact controller uses the ABB’s RAPID
robot programming language. Despite being a high-
level programming language, RAPID has some
notable features, such as the possibility of connecting
it to other languages via socket.
4 METHODOLOGY
4.1 Hardware Overview
Figure 3 shows the hardware diagram representing
how the system components are interconnected. The
core component is the IRC5 compact controller,
which its function is to interconnect the system
components via I/O ports. Moreover, the controller is
connected to the laptop using a Local Area Network
(LAN) port, allowing its connection to ROS scripts
via socket.
The compressor, the 3/2-way valve, the robotic
arm and the end-effector compose the pneumatic side
of the system. First, a pneumatic hose connects the
compressor to the valve. Next, a second hose
connects the valve to a pneumatic input port of the
robotic arm. This port allows the airflow inside the
Smart Autonomous Part Displacement System based on Point Cloud Segmentation
551
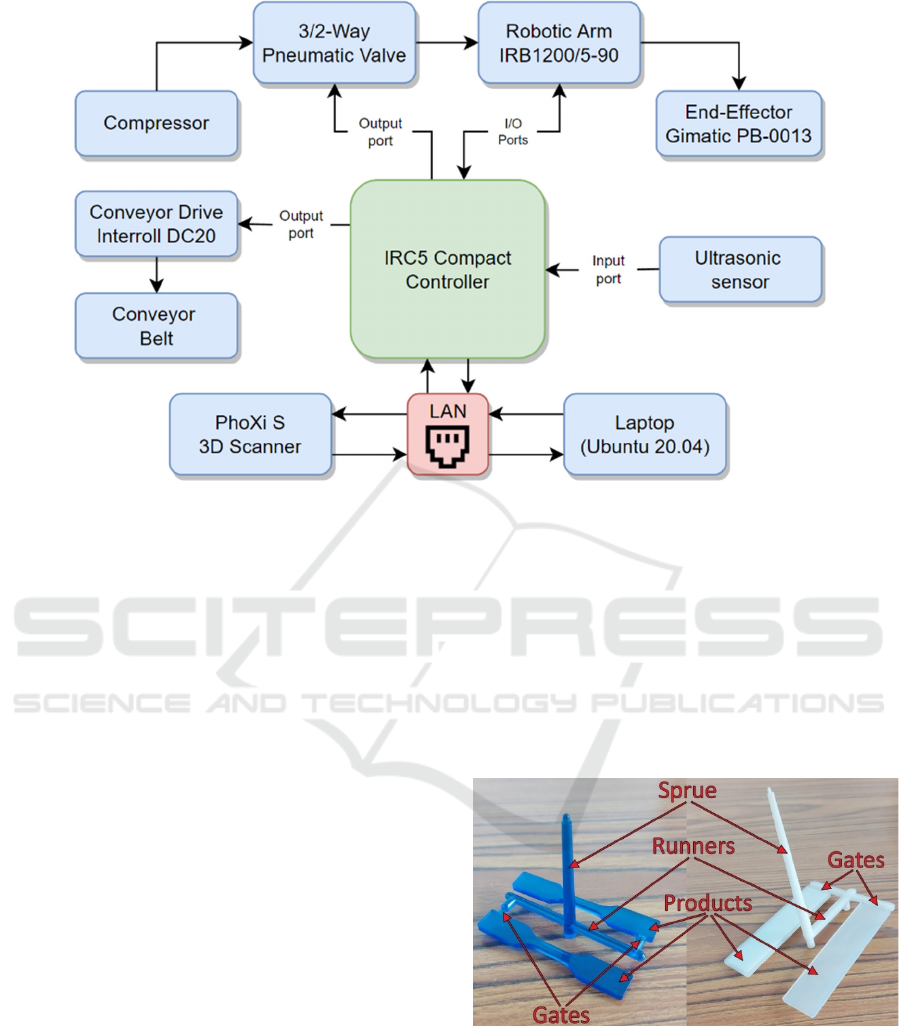
Figure 3: System hardware overview.
robot, which has its pneumatic output port near
the robot tip. Finally, the last hose connects this
output port to the End-effector, closing the pneumatic
circuit. Moreover, a twenty-four volts output port
connects the pneumatic valve to the IRC5 compact
controller for switching whether the pressure is
released or suppressed.
The conveyor belt has a constant velocity and
uses another twenty-four volts output port of the
IRC5 compact controller to control whether this
conveyor belt is turned on or off. Moreover, an
ultrasonic sensor detects moulded parts going through
the conveyor belt, i.e., this sensor sends a high-level
signal to the controller via its input port every time a
moulded part goes through the conveyor belt. On the
other hand, the 3d scanner is the last part of the
hardware structure and is one of the most
fundamental components. The LAN port connects
this scanner to the laptop, allowing the execution of
its commands via ROS scripts, such as starting a new
scan or managing previous scans.
4.2 System Control Description
This system is being developed for performing on
manufacturing lines of moulded parts comes out from
injection machines. In this way, it is considered that
all objects placed in the conveyor belt have the
structure of a moulded part, i.e., sprue, runners, gates,
and products. Figure 4 shows two examples of
moulded parts and their structure parts.
Figure 5 shows the system flowchart,
representing the main steps of the autonomous part
displacement task. At the initial stage, the conveyor
belt starts and remains on until the ultrasonic sensor
detects a moulded part on this conveyor. Next, the
conveyor belt stops placing the moulded part below
the 3D scanner, getting the object point cloud through
its scan. Then, the scanner sends this point cloud to
the ROS scripts, starting the displacement stage of the
process.
Figure 4: Examples of injected moulded parts, showing
their standard components, i.e., sprue, runner, gate and
products.
The processing stage consists of the extraction of
information from the scanned object. More
specifically, the extraction of the sprue coordinates of
this moulded part. The first step of this processing
consists of segmenting the point cloud into the sprue,
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
552

Figure 5: Autonomous pick-and-place process flowchart.
runners, gates, and products. In this way, the system
uses the PointNet algorithm for realizing this
segmentation since it is state-of-the-art in object
segmentation, fitting the aims of this work.
The PointNet model training is one of the biggest
challenges when dealing with this approach.
However, it is intended to create a dataset using the
ATOS Core 200 3D scanner, getting a precise and
reliable scan of a set of moulded parts. Finally, the
PointNet model will be trained and evaluated with
point clouds of moulded parts in real-time.
After the system starts to segment and then gets
the sprue coordinates, the End-effector attached to the
robotic arm must pick the moulded part by its sprue,
transferring it to the next conveyor belt or other
auxiliary process steps. This stage uses ROS-
Industrial and MoveIt [20] packages from ROS to
perform the robotic arm navigation. Using ROS-
Industrial is possible to control the robotic arm
sending the target coordinates. Moreover, MoveIt can
manage the navigation process, finding the best route
and avoiding collision points with the environment.
Finally, all the core steps occurring in the physical
layer are also represented digitally inside the Rviz
platform, allowing the visualization of these steps in
real-time using a computer.
5 DISCUSSION
The development of the proposed system is still
ongoing, and preliminary results will be presented
soon. Meanwhile, advances have been made in the
hardware assembly, interconnecting different system
parts, such as controlling the pneumatic valve and the
conveyor belt via the I/O ports of the IRC5 compact
controller. Furthermore, a digital representation of the
robotic arm, the 3D scanner and the conveyor belt
were created and then organized inside Rviz,
mimicking the physical manufacturing line.
Although the proposed system is being developed
for working in a manufacturing line of moulded parts,
it is vital to highlight that such an approach might be
spread for other scenarios using different objects
instead injected moulded parts. Owing to the
combination of the PointNet algorithm with 3D
vision, it is possible to highly increase the autonomy
of industrial processes, such as the gripping of objects
placed in a conveyor belt.
6 CONCLUSIONS
The current manuscript presents a conceptual
framework for an intelligent system for autonomous
part identification and displacement capable of self-
adjusting itself according to the injected moulded part
displacement on the conveyor belt. This feature
ensures the development of a more robust system that
is highly sensitive to the object's variations in its
shape and dimensions while working autonomously
with no or minimum human involvement. Moreover,
PointNet networks are state-of-the-art when dealing
with point cloud classification and segmentation,
making this network a suitable tool for pick-and-place
tasks in manufacturing lines.
ACKNOWLEDGEMENTS
This publication emanated from the research
conducted with the support of the Science Foundation
Ireland (SFI), Grant Number SFI 16/RC/3919, co-
funded by the European Regional Development Fund,
The Technological University of the Shannon
Presidents Doctoral Scholarship and Johnson &
Johnson.
REFERENCES
ABB. (n.d.). IRB-1200-5-90. Retrieved January 2, 2022,
from https://new.abb.com/products/robotics/industrial-
robots/irb-1200
Bahrin, M. A. K., Othman, M. F., Azli, N. H. N., & Talib,
M. F. (2016). Industry 4.0: A review on industrial
automation and robotic. In Jurnal Teknologi (Vol. 78,
Issues 6–13). https://doi.org/10.11113/jt.v78.9285
Bai, C., Dallasega, P., Orzes, G., & Sarkis, J. (2020).
Industry 4.0 technologies assessment: A sustainability
perspective. International Journal of Production
Smart Autonomous Part Displacement System based on Point Cloud Segmentation
553

Economics, 229. https://doi.org/10.1016/j.ijpe.2020.10
7776
Borkar, V. (2017). Develpoment of Pick and Place Robot
for Industrial. International Research Journal of
Engineering and Technology (IRJET), 4(9).
Chettibi, T., Lehtihet, H. E., Haddad, M., & Hanchi, S.
(2004). Minimum cost trajectory planning for industrial
robots. European Journal of Mechanics, A/Solids,
23(4).
https://doi.org/10.1016/j.euromechsol.2004.02.006
Ghobakhloo, M. (2020). Industry 4.0, digitization, and
opportunities for sustainability. In Journal of Cleaner
Production (Vol. 252). https://doi.org/10.1016/
j.jclepro.2019.119869
Lasi, H., Fettke, P., Kemper, H. G., Feld, T., & Hoffmann,
M. (2014). Industry 4.0. Business and Information
Systems Engineering, 6(4). https://doi.org/10.1007/
s12599-014-0334-4
Li, Y., Huang, T., & Chetwynd, D. G. (2018). An approach
for smooth trajectory planning of high-speed pick-and-
place parallel robots using quintic B-splines.
Mechanism and Machine Theory, 126. https://doi.org/
10.1016/j.mechmachtheory.2018.04.026
Maskuriy, R., Selamat, A., Ali, K. N., Maresova, P., &
Krejcar, O. (2019). Industry 4.0 for the construction
industry-How ready is the industry? Applied Sciences
(Switzerland), 9(14). https://doi.org/10.3390/app9142
819
Oláh, J., Aburumman, N., Popp, J., Khan, M. A., Haddad,
H., & Kitukutha, N. (2020). Impact of industry 4.0 on
environmental sustainability. Sustainability
(Switzerland), 12(11). https://doi.org/10.3390/su1211
4674
Oztemel, E., & Gursev, S. (2020). Literature review of
Industry 4.0 and related technologies. In Journal of
Intelligent Manufacturing (Vol. 31, Issue 1).
https://doi.org/10.1007/s10845-018-1433-8
Perumaal, S. S., & Jawahar, N. (2013). Automated
trajectory planner of industrial robot for pick-and-place
task. International Journal of Advanced Robotic
Systems, 10. https://doi.org/10.5772/53940
Photoneo. (n.d.). PhoXi 3D Scanner S. Retrieved January 2,
2022, from https://www.photoneo.com/products/
phoxi-scan-s/
Prabhakar, M., Paulraj, V., Karthi Kannappan, D. A.,
Dhanraj, J. A., & Ganapathy, D. (2021). Remote
Controlled Pick and Place Robot. IOP Conference
Series: Materials Science and Engineering, 1012(1).
https://doi.org/10.1088/1757-899x/1012/1/012003
Qi, C. R., Su, H., Mo, K., & Guibas, L. J. (2016). PointNet:
Deep Learning on Point Sets for 3D Classification and
Segmentation. CoRR, abs/1612.00593. http://arxiv.org/
abs/1612.00593
Ramanathan S, Akash V, Arun Prasad V, & Venkat Rahul
M. (2020). Pick and Place Robot for Surface Mounting
Devices. International Research Journal on Advanced
Science Hub, 2(8). https://doi.org/10.47392/irjash.20
20.97
Roblek, V., Meško, M., & Krapež, A. (2016). A Complex
View of Industry 4.0. SAGE Open, 6(2).
https://doi.org/10.1177/2158244016653987
Ruchiand Goel, & Pooja Gupta. (2020). Robotics and
Industry 4.0. In A. Nayyar Anand and Kumar (Ed.), A
Roadmap to Industry 4.0: Smart Production, Sharp
Business and Sustainable Development (pp. 157–169).
Springer International Publishing. https://doi.org/10.10
07/978-3-030-14544-6_9
Willow Garage, Stanford Artificial Intelligence Laboratory,
& Open Robotics. (n.d.). ROS - Robot Operating
System. Retrieved January 2, 2022, from
https://www.ros.org/
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
554
