
Gear Wheels based Simulation of Crawlers for Mobile Robot Servosila
Engineer
Ruslan Gabdrahmanov
1 a
, Tatyana Tsoy
1 b
, Yang Bai
2 c
, Mikhail Svinin
2 d
and Evgeni Magid
1,3 e
1
Intelligent Robotics Department, Kazan Federal University, 35 Kremlin Street, Kazan, Russian Federation
2
College of Information Science and Engineering, Ritsumeikan University, Biwako-Kusatsu Campus 1-1-1 Nojihigashi,
Kusatsu, Japan
3
HSE University, 34 Tallinskaya Street, Moscow, Russian Federation
Keywords:
Rescue Robot, Crawler Robot, ROS, Modelling, Gazebo.
Abstract:
In a process of research, it is beneficial to test new theories and early stage developments in virtual worlds of
an adequate realistic simulation before starting real world experiments. While modelling of wheeled mobile
robots is well-studied and typically does not imply significant difficulties, a realistic modelling of a crawler
robot is a complicated task. This paper discusses several existing approaches for a crawler robot modelling in
Gazebo simulator and presents a new approach, which approximates each crawler with a set of gear wheels.
We compared several approaches for Servosila Engineer crawler robot modelling in Gazebo by their climb-
ing capabilities, velocity, acceleration and real time factor parameters with regard to the real robot. The
comparison results demonstrated that the new approach is feasible in terms of CPU load and provides a better
approximation to the real robot performance. Moreover, it successfully eliminated an issue of a crawler seizure
while climbing sharp edges of obstacles, which is typical for pseudo-wheels based approaches.
1 INTRODUCTION
An unmanned ground vehicle (UGV) is a mobile
robot of any type that moves through its operational
environment along various types of support surfaces,
which might range from a flat surface to a rough
debris-like terrain. A UGV is a most widely used type
of a robot for a variety of real world tasks.
A crawler (or tracked) robot is a sub-type of mo-
bile robots that use different types of tracks as run-
ning gear. Crawler robots are employed when a task
requires an extended mobility of a vehicle, includ-
ing such tasks as planetary exploration, mining and
urban search and rescue (USAR). Typically, crawler
robots have higher level of manoeuvrability relatively
to wheeled robots of similar size and power, but are
inferior in terms of velocity and energy efficiency on
a flat surface.
a
https://orcid.org/0000-0001-9276-2034
b
https://orcid.org/0000-0002-5715-7768
c
https://orcid.org/0000-0003-1080-1939
d
https://orcid.org/0000-0003-2459-2250
e
https://orcid.org/0000-0001-7316-5664
An urban search and rescue (USAR) robotics is a
most obvious example of an application that demands
a high level of a robot manoeuvrability.
USAR was introduced at the end of the 20th cen-
tury as a separate branch of a field robotics, which
concentrates on mechanics of rescue robots, their nav-
igation, mapping and other classic tasks of robotics as
well as interaction of a human with a robot, all being
viewed through a prism of rescue related tasks. One
of the main tasks of USAR robotics is to search for
victims in partially damaged or completely destroyed
man-made structures. Therefore, a typical USAR task
environment for a UGV contains piles of trash and
debris formed by building materials, furniture, vari-
ous appliances, household and office items that make
it difficult to observe, localize and map the environ-
ment (Safin et al., 2021; Malov et al., 2019).
Simulations are widely used in many areas of
robotics, including design and construction of a robot,
control algorithms development, education, demon-
strations, etc. (Yakovlev et al., 2015). They allow
creating virtual models of robots and a broad variety
of environments (Sheh et al., 2014; Simakov et al.,
2019), while targeting to achieve a high level of real-
Gabdrahmanov, R., Tsoy, T., Bai, Y., Svinin, M. and Magid, E.
Gear Wheels based Simulation of Crawlers for Mobile Robot Servosila Engineer.
DOI: 10.5220/0011355200003271
In Proceedings of the 19th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2022), pages 565-572
ISBN: 978-989-758-585-2; ISSN: 2184-2809
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
565

ism in behavior of these virtual models (Borisov et al.,
2016). Simulations in robotics are employed for many
reasons, including a typically very high cost of a real
world errors relatively to virtual world errors (Sha-
balina et al., 2019) and the ease of reproducing test
cases (Timperley et al., 2018).
Gazebo is a simulator that was designed specif-
ically for simulating robots and their environ-
ment (Foundation, 2021). Gazebo is fully compat-
ible with Robot Operating System (ROS) (Quigley
et al., 2009), allowing to create and use robot models
with ROS-based control systems without additional
labor. Other popular robotics simulators include We-
bots (Prabhakar et al., 2020), VRep (recently known
as CoppeliaSim (Yumbla et al., 2020)) and others. We
selected the Gazebo simulator because of its com-
patibility with ROS and high-quality physics, which
are the most important characteristics for our task of
a highly manoeuvrable crawler robot modelling and
model validation. There are several tools available
in Gazebo that are suitable for the implementation of
the running gear of robots, however, most of them are
intended for simulating wheeled or walking robots.
Since there is no ready-made template solution for
simulating active tracks, several different home-made
tool-based approximations were previously used by
researchers to simulate tracks of a crawler robot while
employing conventional wheeled robot approaches.
In this paper we present a new method of mod-
elling a crawler using geared pseudo wheels. The
approach demonstrated a stable behaviour and an ac-
ceptable performance in terms of a CPU and memory
load, which were indirectly measured via real time
factor (RTF) of Gazebo simulator while using RTF=1
for the real robot as a base benchmark. Moreover,
the resulting model performance parameters became
close to the real Servosila Engineer robot parameters
relatively to its previous models.
The rest of the paper is organized as follows. Sec-
tion 2 overviews existing solutions, including the ones
that were previously proposed by out team. Section 3
describes our new approach for the gear wheels based
simulation of crawlers and Section 4 presents a com-
parison of the real robot and four different models.
Finally, we conclude in Section 5.
2 EXISTING SOLUTIONS
At the time of writing this paper, there exists a number
of methods to simulate crawler robots’ chassis. These
methods could be divided into three main groups: a
brute-force generic acceleration, a wheel-based ap-
proach and a segmental tracks approach. Each ap-
proach has particular advantages and disadvantages,
which are described in this section.
2.1 Brute-force Generic Acceleration
A brute acceleration force is applied directly to a
robot chassis or to robot tracks, while a mobile part
of the chassis (tracks) is modelled with skid runners
or passive fixed wheels. This method is the most pro-
ductive in terms of CPU and memory use (and thus
RTF), and is easy to implement. Yet, its correspon-
dence to a real physical robot model is questionable.
This approach could allow to achieve a relatively real-
istic behavior of a robot model solely on a flat surface,
but in other cases the behavior of the model does not
correspond to the real robot (Pecka et al., 2017).
2.2 Wheel-based Approaches
This approach uses standard fixed wheels (Shabalina
et al., 2018) in order to approximate a robot track. The
wheels could be visible when they completely replace
a rubber or a metal track, or they could be presented
in a virtual form. In the virtual form, the user sees a
visualization of a track while wheels, often referred
as pseudo-wheels, are responsible for physical inter-
action with environment. In both cases, wheels are
arranged in such a way that allows repeating a shape
of real robot tracks. Moreover, wheels could partially
overlap with each other while the physics of such col-
lisions between the wheels is ignored. We distinguish
two most popular wheel-based approaches as a single
line of large fixed wheels (further refereed as a line-
of-wheels) and a large number of fixed wheels that are
distributed along a track (further refereed as a circum-
ferential wheels).
Line-of-wheels approach (LWA) forms a struc-
ture where all wheels are located on a single straight
line. These are standard fixed wheels of a diame-
ter, which is equal to a height of a track. Wheels
could virtually overlap each other without consider-
ing the inter-wheel collision physics (Figure 1) or
could be arranged without physical intersections (Fig-
ure 2, (Pecka et al., 2017)).
LWAs, especially with a small number of large
size wheels, look attractive in terms of simulation
performance (CPU, memory, RTF) and development
complexity. Yet, these approaches are suitable only
for a flat surface, since a robot can unnaturally get
stuck while climbing an obstacle if a sharp part of the
obstacle gets between wheels (Sokolov et al., 2016)
(Figure 4, 5). Increasing a number of intersecting
wheels partially solves the problem (Pecka et al.,
2017), however, more wheels inevitably reduce per-
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
566
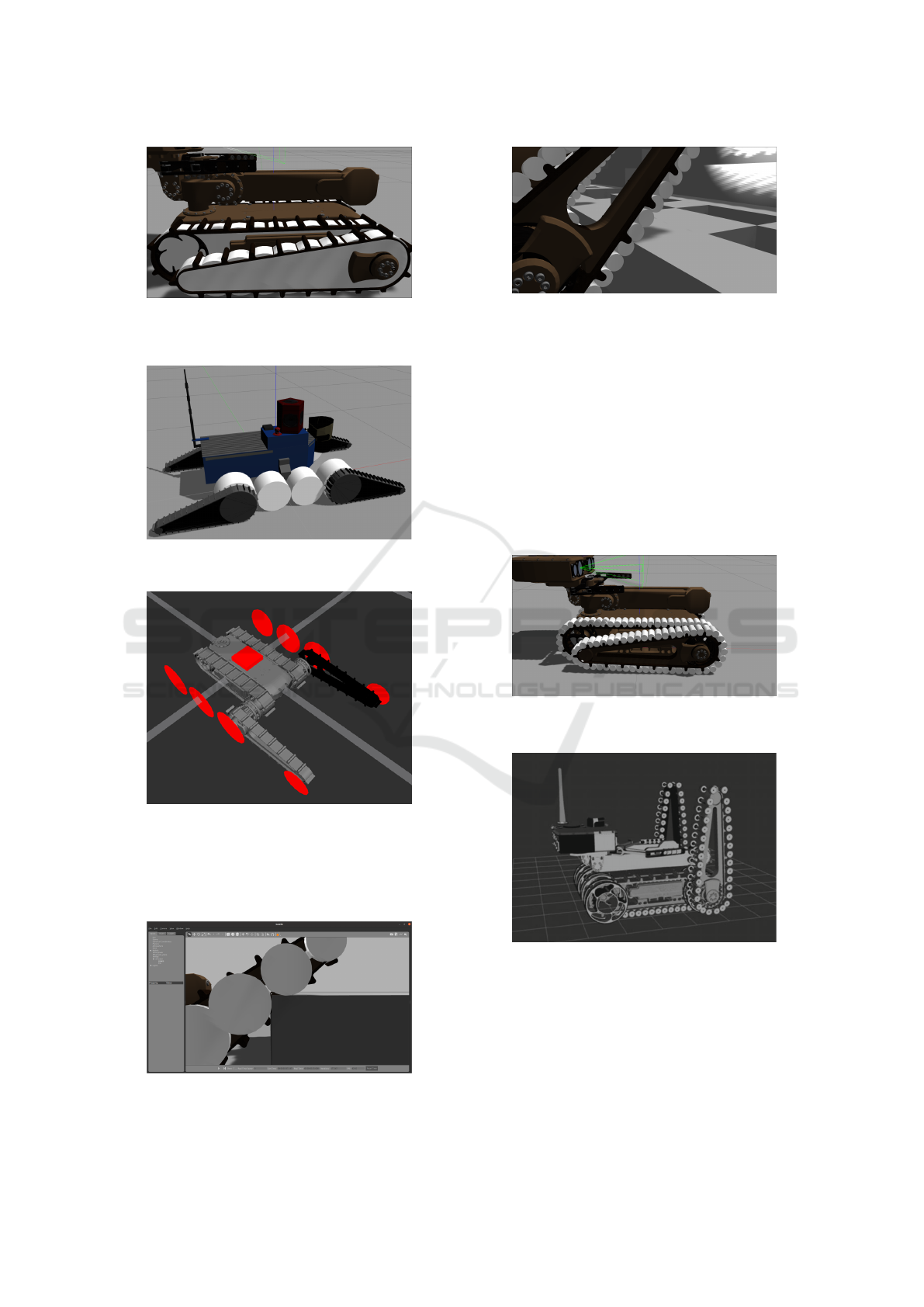
Figure 1: Line-of-wheels approach with large virtual self-
intersecting wheels (one of optional models constructed by
the authors).
Figure 2: Line-of-wheels approach with large real non-
intersecting wheels (Pecka et al., 2017).
Figure 3: Line-of-wheels approach with large vir-
tual non-intersecting wheels with broad spaces between
wheels (Sokolov et al., 2016).
formance, while the robot could still get stuck in a
similar way, especially if it has a large mass.
Figure 4: LWA: A robot with large wheels gets stuck on a
sharp corner of an obstacle.
Figure 5: CWA: a robot with small wheels gets stuck on a
sharp corner of an obstacle.
Circumferential wheels approach (CWA) em-
ploys a large number of wheels that are placed along
a perimeter of each track. The wheels have typi-
cally equal radius, which is significantly smaller than
a height of tracks (Figure 6, 7). Such implementation
achieves greater similarity in terms of geometry with-
out intersecting wheels, but suffers from poor simu-
lation performance associated with a large number of
wheels. It is also worth mentioning hybrid versions,
which use wheels of varying sizes in order to simulate
a track (Figure 8).
Figure 6: CWA: tightly packed small non-intersecting
wheels.
Figure 7: CWA: small wheels with spaces in-between
(Moskvin and Lavrenov, 2020).
2.3 Segmental Tracks
In this approach a track is assembled from rectangular
or more complex shape segments, which are linked
into a single chain by passive connections. he seg-
ments are stretched between at least two active rollers
Gear Wheels based Simulation of Crawlers for Mobile Robot Servosila Engineer
567

(a) The real robot.
(b) A hybrid model of the robot in USARSim.
Figure 8: Talon crawler robot and it’s model in USAR-
Sim (Pepper et al., 2007).
from front and rear edges of a chassis and are held
there using simulation physics or programmatically
(Figure 9, 10). Additional passive or active rollers
could be employed. Theoretically, such approach is
the most reliable since it has an almost absolute geo-
metric similarity, but, as a rule, it has a low produc-
tivity (Morita et al., 2018).
Considering the three approaches descried in this
section, segmental tracks seem to be the most attrac-
tive for developing a crawler model in terms of sim-
ilarity with a real robot since geometrically such im-
plementation is the closest one to real tracks. How-
ever, low computational efficiency and low stabil-
ity of this method make it unsatisfactory in prac-
tice (Sokolov et al., 2017; Kenwright and Morgan,
2012). Moreover, a robot with segmental tracks can
also get stuck if a sufficiently sharp or small obstacle
gets into a gap between track’s segments
Figure 9: Dynamic segmental tracks (Morita et al., 2018).
Figure 10: Another implementation of segmantal
tracks (Sokolov et al., 2017).
3 GEAR WHEELS BASED
SIMULATION
We propose a new approach of a track modelling,
which employs virtual gear wheels. Using such mod-
ification for LWA with large wheels could drastically
solve the problem of getting stuck without sacrificing
computational performance. We added lugs to a stan-
dard fixed wheel model, which are similar to those
found on most real tracks. We refer such wheel as a
gear wheel although it does not actually repeat a shape
of a real gear (Figure 11).
As a starting point, we used a model of Servosila
Engineer robot that was previously created by our
team (Moskvin and Lavrenov, 2020) using CWA with
small wheels, referred as pseudo-wheels. This model
is demonstrated in Figure 7: the white circles are the
pseudo-wheels (which are standard fixed wheels) and
the black track is just a texture that forms a visual rub-
ber track without any physics behind it. The actual
physics of interaction with an environment (support-
ing plane) is delegated to the pseudo-wheels, which
could be switched on/off for visualization. Next, all
small pseudo-wheels were replaced by the new gear
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
568

Figure 11: Single gear wheel.
wheels with of approximately the same size (Figure
12).
For virtual testing of the new track model con-
cept as well as for further comparative testing with
other models we employed a random step environ-
ment (RSE), or random stepfield, which provides a
good approximation of an uneven terrain (Jacoff et al.,
2008). The new model achieved a declared by the
manufacturer passability and got rid of the issue of
seizure while climbing sharp edges of obstacles.
Unfortunately, the obtained RTF of the new
model is not acceptable for a comfortable use of the
model (Abbyasov et al., 2020). In the attempt to im-
prove the model performance in the terms of RTF, we
constructed another model that uses LWA with large
gear wheels, which have a similar size and shape of
protrusions to those of the real robot (Figure 13).
Figure 12: Servosila Engineer robot model with CWA and
small gear wheels.
Figure 13: Servosila Engineer robot model with LWA and
large gear wheels.
Initial angular position of each wheel is calculated
using the following relationship:
x = θ/3 ∗ n (1)
where θ is an angle between two nearest segments
drawn from a center of a wheel to a most distant (from
the wheel center) point of a protrusion on the wheel
(Figure 14); n is a counting number of a wheel - the
counting starts from n=1 for a last (rearmost) wheel
of each side of a simulated track.
Figure 14: Angle θ for an initial position calculation.
This approach allows avoiding an excessive un-
natural shaking of the robot in motion due to a syn-
chronous rotation of the non-round wheels. The ra-
dius of a wheel for odometrical data processing is
set as a radius of a circumscribed circle for the gear
wheel.
Gear wheels allowed to (almost completely) solve
the problem of a crawler seizure while climbing sharp
edges of obstacles that is caused by standard fixed
wheels. The wheels protrusions allow a robot model,
similarly a real crawler robot, to ”cling” to an obsta-
cle surface at climbing and to achieve manoeuvrabil-
ity characteristics that closely correspond to the real
robot. However, due to their shape, the protrusions
complicate odometry and create a robot shaking ef-
fect while moving on a flat surface. Nevertheless,
the shaking effect corresponds to a real crawler robot
shaking, which brings the model behavior closer to
the real robot.
The LWA large wheels implementation also
showed a sufficient manoeuvrability and climbing
abilities without seizure. Comparatively to the CWA
small wheels model, the RTF was significantly im-
proved achieving 0.6 for static cases and 0.5 for
dynamic cases when the new robot model travels
through a RSE. Moreover, the LWA large wheels
model is featured with a high degree of geometry sim-
ilarity with the real robot.
Gear Wheels based Simulation of Crawlers for Mobile Robot Servosila Engineer
569
4 COMPARISON OF MODELS
For virtual testing a number of typical for urban
search and rescue environments were constructed in
a form of a random step environment and four differ-
ent models of Servosila Engineer were validated with
the same settings in a teleoperational mode.
Table 1: Real robot dynamic characteristics.
Characteristic Real
robot
Declared by
the manu-
facturer
Max. linear velocity 0,4 m/s
a
1,39 m/s
Max. rotation velocity 8,5 rpm -
Max. elevation angle 45° 35°
Stopping distance with
max. linear velocity
1 cm -
a
We assume the velocity is limited by a low-level con-
troller.
4.1 Virtual Testing
Virtual tests of the models were carried out using typ-
ical obstacles of RSE, 20 runs per each robot and en-
vironment. The results are presented in Table 2.
Table 2: Obstacle tests.
Obstacle
type
Percentage of successful runs (%)
CWA
model
LWA
model
Model with
gear wheels
Random
RSE
0 15% 100%
Horizontal
barrier
0 10% 100%
Diagonal
barrier
0 0 40%
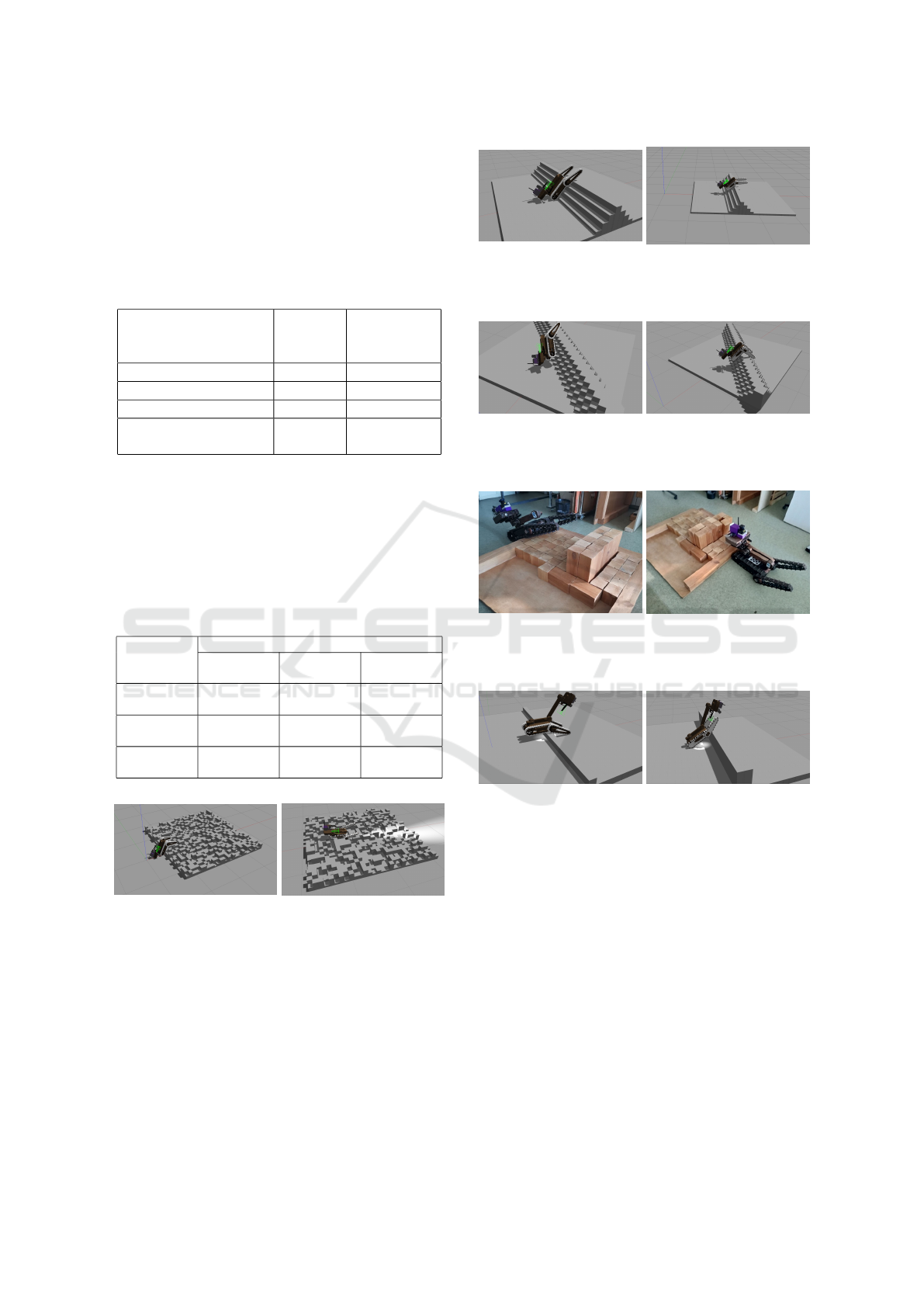
(a) CWA standard fixed
wheels.
(b) CWA gear wheels.
Figure 15: Robot models on a randomly generated RSE.
The dynamic characteristics and passable obstacle
height of the new and previous robot models, and the
real robot were measured with virtual and real envi-
ronment tests that were performed in a teleoperational
mode (Figure 18 a, b; Figure 19 a, b). The results are
presented in Table 3.
(a) CWA standard fixed
wheels.
(b) CWA gear wheels.
Figure 16: Robot models on RSE with a horizontal barrier.
(a) CWA standard fixed
wheels.
(b) CWA gear wheels.
Figure 17: Robot models on RSE with diagonal barrier.
(a) Real robot overcomes 20
cm barrier (begin).
(b) Real robot overcomes 20
cm barrier (end).
Figure 18: Real robot on RSE with horizontal barrier.
(a) Robot model with CWA
overcomes 10 cm barrier.
(b) Robot model with gear
LWA overcomes 20 cm bar-
rier.
Figure 19: Robot models on RSE with horizontal barriers.
4.1.1 Results
The real robot parameters in Table 1 and performance
in RTF were used as a benchmark for the virtual tests,
which were described in the previous subsection. The
results of the tests are presented in Tables 2 and 3.
Virtual testing revealed the following qualitative
characteristics of the proposed gear wheel based ap-
proaches:
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
570

Table 3: Comparison of models and real robot.
Model Max veloc-
ity
Max obstacle
height
b
Max angular
velocity
Max braking
distance
Acceleration RTF
Real robot 0,4 m/s
c
20 cm
d
8,5 rpm 0,02 m 0,2 m/s
2
1.0
CWA, small
standard
fixed wheels
0,5 m/s 10 cm 4 rpm 1 m 0,1 m/s
2
0.2
LWA, large
standard
fixed wheels
0,4 m/s 15 cm 2 rpm 1 m 0,1 m/s
2
0.65
CWA, small
gear wheels
0,4 m/s 20 cm
d
2 rpm 0,5 m 0,1 m/s
2
0.18
LWA, large
gear wheels
0,4 m/s 20 cm
d
4 rpm 0,3 m 0,2 m/s
2
0.65
b
A parallelepiped obstacle on a flat surface. The robot moves without rocking or any other tricks that allow to overcome a
higher obstacle.
c
Presumably the velocity is limited programmatically on a low-level. In the robot specifications, the manufacturer announces
a maximal velocity of 5 km/h, which is 1,39 m/s
d
Technically, it is possible to overcome a height of up to 60 cm, but this requires to employ certain movement patterns and
balance control, which is very difficult in a teleoperational mode.
• The models correspondence with dynamics and
geometry of the real robot is significantly higher
than for any previously developed standard fixed
wheels solutions. Yet, a model that could be
constructed using segmental method might allow
achieving even a better correspondence.
• The robot seizure problem while climbing sharp
edges of obstacles is eliminated.
• The performance in terms of Gazebo simulation
RTF is acceptable for LWA large gear wheels,
while the implementation for CWA small gear
wheels should be improved.
5 CONCLUSIONS
While modelling of wheeled mobile robots is well-
studied and typically does not imply significant dif-
ficulties, a realistic modelling of a crawler robot is
a complicated task. This paper discussed several
existing approaches for a crawler robot modelling
in Gazebo simulator and presented a new approach,
which approximates each crawler with a set of gear
wheels. We compared several approaches for Ser-
vosila Engineer crawler robot modelling in Gazebo
by their climbing capabilities, velocity, acceleration
and real time factor parameters with regard to the real
robot. The real robot parameters and performance
were used as a benchmark for the tests. For virtual
testing a number of typical for urban search and res-
cue environments were constructed and four different
models of Servosila Engineer were validated with the
same settings in a teleoperational mode. The compar-
ison results demonstrated that two new gear wheels
based approaches are feasible in terms of CPU load
and provide a better approximation to the real robot
performance. Moreover, they successfully eliminated
an issue of a crawler seizure while climbing sharp
edges of obstacles, which is typical for pseudo-wheels
based approaches.
As a part of our future work we plan to take a
deeper look at the physics of the model relatively
to the real robot and to consider typical issues of a
crawler robot slipping and turning.
ACKNOWLEDGEMENTS
This paper has been supported by the Kazan Federal
University Strategic Academic Leadership Program
(”PRIORITY-2030”). The third and forth authors ac-
knowledge the support of the Japan Science and Tech-
nology Agency, the JST Strategic International Col-
laborative Research Program, Project No. 18065977.
REFERENCES
Abbyasov, B., Lavrenov, R., Zakiev, A., Yakovlev, K.,
Svinin, M., and Magid, E. (2020). Automatic tool for
gazebo world construction: from a grayscale image to
a 3d solid model. In 2020 IEEE International Con-
ference on Robotics and Automation (ICRA), pages
7226–7232. IEEE.
Borisov, A., Kuznetsov, S., Mamaev, I., and Tenenev, V.
(2016). Describing the motion of a body with an el-
liptical cross section in a viscous uncompressible fluid
Gear Wheels based Simulation of Crawlers for Mobile Robot Servosila Engineer
571

by model equations reconstructed from data process-
ing. Technical Physics Letters, 42(9):886–890.
Foundation, O. S. R. (2021). Gazebo official site.
http://gazebosim.org/.
Jacoff, A., Downs, A., Virts, A., and Messina, E. (2008).
Stepfield pallets: Repeatable terrain for evaluating
robot mobility. In Proceedings of the 8th Workshop
on Performance Metrics for Intelligent Systems, pages
29–34.
Kenwright, B. and Morgan, G. (2012). Practical introduc-
tion to rigid body linear complementary problem (lcp)
constraint solvers. In Algorithmic and Architectural
Gaming Design: Implementation and Development,
pages 159–201. IGI Global.
Malov, D., Edemskii, A., and Saveliev, A. (2019). Proactive
localization system as a part of a cyberphysical smart
environment. In 2019 International Conference on In-
dustrial Engineering, Applications and Manufactur-
ing (ICIEAM), pages 1–5. IEEE.
Morita, S., Hiramatsu, T., Niccolini, M., Argiolas, A., and
Ragaglia, M. (2018). Kinematic track modelling for
fast multiple body dynamics simulation of tracked
vehicle robot. In 2018 23rd International Confer-
ence on Methods & Models in Automation & Robotics
(MMAR), pages 910–915. IEEE.
Moskvin, I. and Lavrenov, R. (2020). Modeling tracks and
controller for servosila engineer robot. In Proceed-
ings of 14th International Conference on Electrome-
chanics and Robotics “Zavalishin’s Readings”, pages
411–422. Springer.
Pecka, M., Zimmermann, K., and Svoboda, T. (2017). Fast
simulation of vehicles with non-deformable tracks. In
2017 IEEE/RSJ International Conference on Intelli-
gent Robots and Systems (IROS), pages 6414–6419.
IEEE.
Pepper, C., Balakirsky, S., and Scrapper, C. (2007). Robot
simulation physics validation. In Proceedings of the
2007 Workshop on Performance Metrics for Intelli-
gent Systems, pages 97–104.
Prabhakar, M., Paulraj, V., Dhanraj, J. A., Nagarajan, S.,
Kannappan, D. A. K., and Hariharan, A. (2020). De-
sign and simulation of an automated guided vehicle
through webots for isolated covid-19 patients in hos-
pitals. In 2020 IEEE 4th Conference on Information &
Communication Technology (CICT), pages 1–5. IEEE.
Quigley, M., Conley, K., Gerkey, B., Faust, J., Foote, T.,
Leibs, J., Wheeler, R., Ng, A. Y., et al. (2009). Ros: an
open-source robot operating system. In ICRA work-
shop on open source software, volume 3, page 5.
Kobe, Japan.
Safin, R., Lavrenov, R., and Mart
´
ınez-Garc
´
ıa, E. A. (2021).
Evaluation of visual slam methods in usar applica-
tions using ros/gazebo simulation. In Proceedings of
15th International Conference on Electromechanics
and Robotics” Zavalishin’s Readings”, pages 371–
382. Springer.
Shabalina, K., Sagitov, A., and Magid, E. (2018). Compar-
ative analysis of mobile robot wheels design. In 2018
11th International Conference on Developments in
esystems Engineering (dese), pages 175–179. IEEE.
Shabalina, K., Sagitov, A., Su, K.-L., Hsia, K.-H., and
Magid, E. (2019). Avrora unior car-like robot in
gazebo environment. In International Conference on
Artificial Life and Robotics, pages 116–119.
Sheh, R., Jacoff, A., Virts, A.-M., Kimura, T., Pellenz,
J., Schwertfeger, S., and Suthakorn, J. (2014). Ad-
vancing the state of urban search and rescue robotics
through the robocuprescue robot league competi-
tion. In Field and service robotics, pages 127–142.
Springer.
Simakov, N., Lavrenov, R., Zakiev, A., Safin, R., and
Mart
´
ınez-Garc
´
ıa, E. A. (2019). Modeling usar maps
for the collection of information on the state of the en-
vironment. In 2019 12th International Conference on
Developments in eSystems Engineering (DeSE), pages
918–923. IEEE.
Sokolov, M., Afanasyev, I., Lavrenov, R., Sagitov, A.,
Sabirova, L., and Magid, E. (2017). Modelling
a crawler-type ugv for urban search and rescue in
gazebo environment. In Artificial Life and Robotics
(ICAROB 2017), International Conference on, pages
360–362.
Sokolov, M., Lavrenov, R., Gabdullin, A., Afanasyev, I.,
and Magid, E. (2016). 3d modelling and simulation of
a crawler robot in ros/gazebo. In Proceedings of the
4th International Conference on Control, Mechatron-
ics and Automation, pages 61–65.
Timperley, C. S., Afzal, A., Katz, D. S., Hernandez, J. M.,
and Le Goues, C. (2018). Crashing simulated planes is
cheap: Can simulation detect robotics bugs early? In
2018 IEEE 11th International Conference on Software
Testing, Verification and Validation (ICST), pages
331–342. IEEE.
Yakovlev, K., Baskin, E., and Hramoin, I. (2015). Grid-
based angle-constrained path planning. In Joint Ger-
man/Austrian Conference on Artificial Intelligence
(K
¨
unstliche Intelligenz), pages 208–221. Springer.
Yumbla, F., Yumbla, E. Q., and Moon, H. (2020). The bi-
oloid gp robot with different configurations for simu-
lation in v-rep controlled by the robot operating sys-
tem (ros). In 2020 6th International Conference on
Control, Automation and Robotics (ICCAR), pages
54–58. IEEE.
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
572
