
FROM DIOID ALGEBRA TO P-TIME EVENT GRAPHS
Mohamed Khalid DIDI ALAOUI
Philippe DECLERCK
LISA FRE 2656 CNRS
ISTIA, 62, Av Notre Dame du Lac, 49000 Angers, France
Keywords:
(min,max,+) functions, cycle-time vector, fixed point, P-time event graphs.
Abstract:
The (max,+) algebra is usually used to model Timed event graph. In this paper, we show that P-time event
graphs which extend Timed event graph, can be modelled using maximum, minimum and addition operations.
The result is a new model called interval descriptor system where the time evolution is not strictly deterministic
but belongs to intervals. The cycle-time vector allows us to to check its correct behaviour and to verify the
existence of a state trajectory. Particularly, it detects the presence of token-deads which can generate a dead-
lock.
1 INTRODUCTION
Discrete Event Dynamic Systems can represent a
great number of processes characterized as being con-
current, asynchronous, distributed or parallel, such as
flexible manufacturing systems, multiprocessor sys-
tems or transportation networks. In such systems
the behaviour depends on complex interactions of the
timing of various discrete events. The topical alge-
bra is an important field of mathematical and anal-
ysis techniques of these models. The (max,+) al-
gebra makes it possible to analyse the Timed Event
Graphs and many results are available like spectral
theory and control synthesis. In this paper, a new class
of systems is studied for which the time evolution is
not strictly deterministic but belongs to intervals. At
each step, the lower and upper bounds depends on the
maximization, minimization and the addition opera-
tions simultaneously. The symbol ⊕ stands for the
maximum operation while ∧ corresponds to the min-
imum operation. The operation ⊕ has the neutral el-
ement ε = −∞ whereas ∧ has the neutral element
T = +∞. The notations ⊗ and ¯ corresponds to the
usual addition with the following convention: T ⊗ε =
ε and T ¯ ε = T. The expression a ⊗ b and a ¯ b are
identical if at least either a or b is a finite scalar.
We propose to analyse the following implicit model
called interval descriptor system. The evolution of the
system is described by the following equations where
f
+
and f
−
are (min, max, +) functions. The interpre-
tation of each variable is as follows: like the ”dater”
type in (max,+) algebra, each variable x
i
(k) repre-
sents the date of the kth firing of transition x
i
.
x(k) = x(k) ∧ f
+
(x(k), ..., x(k − m), u(k)
, ..., u(k − m))
x(k) = x(k) ⊕ f
−
(x(k), ..., x(k − m), u(k)
, ..., u(k − m))
with x(k) = ² for k ≤ 0
(1)
The vector u is the input and m is the horizon. We
can also introduce the output y by y(k) = C ⊗ x(k).
To simplify the writing, the matrix C will be chosen
to make a direct correspondence between some com-
ponent of x
i
(k) and a component of output y
i
(k) in a
natural manner. Consequently, some columns can be
null but each row contains only one element e = 0
and ε elsewhere. This equality will not be used in this
paper. The functions f
+
() and f
−
() represent respec-
tively an upper and lower bound of x whose trajectory
is between these bounds. Particularly, if the lower
bound defined by f
−
is a (max, +) function and the
upper bound is infinite, the classical (max, +) systems
can be obtained after some classical manipulations.
In this paper, we give in a first part some preliminar-
ies and important fixed-point theorems. We then in-
troduce a class of interval descriptor system and show
that P-time event graphs can be modelled under this
form. Finally, we analyze the correct behaviour of p-
330
Khalid DIDI ALAOUI M. and DECLERCK P. (2004).
FROM DIOID ALGEBRA TO P-TIME EVENT GRAPHS.
In Proceedings of the First International Conference on Informatics in Control, Automation and Robotics, pages 332-337
DOI: 10.5220/0001137403320337
Copyright
c
SciTePress

time event graphs and particulary the synchronization
of transitions.
2 PRELIMINARIES
The partial order denoted 6 is defined as follows: x 6
y ⇐⇒ x ⊕ y = y ⇐⇒ x ∧ y = x ⇐⇒ x
i
6 y
i
, for i
from 1 to n in <
n
. Notation x < y means that x 6 y
and x 6= y.
Definition 2.1 A dioid D is complete if it is closed
for infinite sums and the distributivity of the multipli-
cation with respect to addition extends to infinite sums
: (∀ c ∈ D ) (∀ A ⊆ D) c ⊗ (
L
x∈A
x) =
L
x∈A
c ⊗ x
For example,
<
max
= (< ∪ {−∞} ∪ {+∞}, ⊕, ⊗)
is complete.
The set of n.n matrices with entries in a complete
dioid D endowed with the two operations ⊕ and ⊗
is also a complete dioid which is noted D
n.n
. The
elements of the matrices in the (max, +) expressions
(respectively (min, +) expressions) are either finite or
ε ((respectively T ). We can deal with nonsquare ma-
trices if we complete by rows or columns with entries
equals to ε ( respectively T). The different operations
operate as in the usual algebra: The notation ¯ refers
to the multiplication of two matrices in which the ∧
operation is used instead of ⊕.
(A ⊕ B)
ij
= A
ij
⊕ B
ij
,
(A ∧ B)
ij
= A
ij
∧ B
ij
,
(A ⊗ B)
ij
=
n
L
k=1
A
ik
⊗ B
kj
(A ¯ B)
ij
=
n
V
k=1
A
ik
¯ B
kj
In (⊕, ⊗) algebra, Kleene’s star is defined by:
A
∗
=
+∞
L
i=0
A
i
. Respectively, in (∧, ¯) algebra,
Kleene’s star is defined by: A
∗
=
+∞
V
i=0
A
i
Noted as G(A), an induced graph of a square ma-
trix A is deduced from this matrix by associating
- a node i to the column i and line i
- an arc from the node j towards the node i if A
ij
6=
ε.
Theorem 2.2 (F. Baccelli and Quadrat, 1992)
Given A and B in a complete dioid and consider
the equation x = A ⊗ x ⊕ B and the inequality
x > A ⊗ x ⊕ B . Then, for these expressions :
A
∗
⊗ B is the least solution ; every solution x ver-
ifies x = A
∗
⊗ x ; T is the greatest solution of the
inequality.
Theorem 2.3 Given A and B in a complete dioid
and consider the equation x = A ¯ x ∧ B and the
inequality x 6 A¯x∧B . Then, for these expressions
: A
∗
¯ B is the greatest solution ; every solution x
verifies x = A
∗
¯ x ; ε is the least solution of the
inequality.
The left ⊗ residuation of b by a is defined by:
a\b = max{x ∈ D such that a ⊗ x 6 b}. Respec-
tively, in (∧, ¯) algebra, the left ¯ residuation of b
by a is defined by: a\
0
b = min{x ∈ D such that
a ¯ x > b}.
Given A and B two matrices in a complete dioid,
the residuation of B ( dimensions n.q ) by A (dimen-
sions n.p) is clearly expressed in the other dioid:
A\B = (−A)
t
¯ B and A\
0
B = (−A)
t
⊗ B with
t: transpose.
Lemma 2.4 part1 (F. Baccelli and Quadrat, 1992) We
have the following equivalences: x ≥ ax ⇔ x =
a
∗
x ⇔ x ≤ a \ x ⇔ x = a
∗
\ x
3 INTERVAL DESCRIPTOR
SYSTEM AND COMPATIBILITY
3.1 Cycle time and compatibility
Now, we introduce the definitions of cycle time,
eigen-vector, eigen-value and ultimately affine
regime (Cheng and Zheng, 2002)(Gaubert and Gu-
nawardena, 1998). These notions are relevant to the
(min, max, +) functions but not always to the topical
functions. Some connections can be established
between these concepts. Addition + is defined by:
∀λ ∈ <, ∀x ∈ <
n
, λ + x = (λ + x
1
, ..., λ + x
n
)
t
(t:
transpose)
Definition 3.1 A min-max function of type (n, 1)
is any function f : <
n
→ <
1
, which can be written
as a term in the following grammar:
f = x
1
, x
2
, · · · x
n
| f + a | f ∧ f | f ⊕ f where a is
an arbitrary real number (a ∈ <)
We consider dynamics of the form:
x(k) = f(x(k − 1)) , ∀k > 1
x(0) = ξ ∈ <
n
where f is a (min, max, +) function of type (n, n)
<
n
→ <
n
. The set of min − max function of type
(n, m) is noticed D
∗
(n, m).
Definition 3.2 The cycle time vector is defined by
χ(f) = lim
k→∞
x(k)/k if it exists. It does not depend
on ξ.
Definition 3.3 An eigen-vector x and its associated
eigen-value λ ∈ <, if they exists, verify f(x) = λ+x
Definition 3.4 The pair (η, v) ∈ (<
n
)
2
is an ulti-
mately affine regime of f if there exists an integer K
such that ∀k > K , f(v + kη) = v + (k + 1)η.
Corollary 3.5 (J. Cochet-Terrasson and Gunawar-
dena, 1999) Any function in D
∗
has a cycle time.
FROM DIOID ALGEBRA TO P-TIME EVENT GRAPHS
331

Moreover, χ(f)= η, for all ultimately regimes (η, v)
∈ (<
n
)
2
of f.
In the following theorems, the notion of cycle time
which always exists in D
∗
makes it possible to check
the existence of a solution of different inequalities and
equalities.
Theorem 3.6 (Gaubert and Gunawardena, 1998)
Let f ∈ D
∗
. The two following conditions are equiv-
alent:
(i) It exists a finite x such that x 6 f(x)
(ii) χ(f) > 0
Theorem 3.7 Let f ∈ D
∗
. The two following con-
ditions are equivalent:
(i) It exists a finite x such that x > f(x)
(ii) χ(f) 6 0
From the two previous theorems 3.6 and 3.7, we
deduce directly the following result.
Theorem 3.8 Let f ∈ D
∗
. The two following con-
ditions are equivalent:
(i) It exists a finite x such that x = f(x)
(ii) χ(f) = 0
A set S of min-max functions is rectangular if for
all G, G
0
∈ S, and for all i = 1, ..., n the function
obtained by replacing the i-th component of G by the
i-th component of G
0
belongs to S. We denote by
rec(S) the rectangular closure of a set S, which is fi-
nite when S is finite. Let S, T be rectangular max and
min representations, respectively, of f. Since min-
max functions are monotone,
L
g∈T
χ(g) 6 χ(f) 6
V
h∈S
χ(h)
The duality conjecture states that the extreme sides
coincide. It was proved in (Gaubert and Gunawar-
dena, 1998)
χ(f) =
V
h∈S
χ(h) =
L
g∈T
χ(g)
Theorem 3.9 (J. Cochet-Terrasson and Gunawar-
dena, 1999) Let f ∈ D
∗
and suppose that
S, T ∈ D
∗
are rectangular and, respectively, a max-
representation and a min-representation of f . The fol-
lowing conditions are equivalent.
1. f has a fixed point with f(x) = x + h.
2.
V
h²S
χ(h) = h
3.
L
g²T
χ(g) = h
Remark : The theorem 3.8 can be considered as a
corollary of the theorem 3.9 when h equals 0.
3.2 Generalized Upper Bound
Constraint and Lower Bound
Constraint forms.
In the aim of reducing the size of the expressions, the
system 1 can classically be transformed in reduced
form by increasing the vector state. With an abuse
of notation, we keep the same notation for x, f
−
and
f
+
to alleviate the notation. From the system 1, we
deduce:
x(k) 6 f
+
(x(k), x(k − 1), u(k))
x(k) > f
−
(x(k), x(k − 1), u(k))
As f
+
and f
−
are (min, max, +) functions, the
above form is more general that the ”UBC” (Upper
Bound Constraint) where f
+
is a max-only function
(see (Walkup and Borriello, 1998) for more details).
We can call the above forms respectively, ”GUBC”
(Generalized Upper Bound Constraint) and ”GLBC”
(Generalized Lower Bound Constraint). As the above
theorems 3.6, 3.7 and 3.8 can only be applied to the
forms x 6 f(x) , x > f (x) or x = f(x) where
f ∈ D
∗
, we must consider special cases. As the type
of the system 1 is defined by the types of the functions
f
+
and f
−
, we can characterize the model by the cou-
ple (type of f
−
, type of f
+
). The type ((min, max,
+), (min, max, +)) represents the more general case
for the system 1 . Under the assumption of the exis-
tence of a solution, they define corresponding classes
of compatible interval descriptor systems. In the next
sections, we will only consider the ((max, +), (min,
+)) type and show that the p-time event graphs can be
modelled under this form.
3.3 ((max, +), (min, +)) type
We consider the following system 3.3 of ((max, +),
(min, +)) type :
f
−
(z(k)) =
1
L
i=0
A
−
i
⊗ x(k − i) ⊕ B
−
⊗ u(k) and
f
+
(z(k)) =
1
V
i=0
A
+
i
¯ x(k − i) ∧ B
+
¯ u(k). (3.3)
Theorem 3.10 The system 3.3 is compatible in the
horizon [k − 1, k] if and only if the cycle time of the
following function g
+
is greater than or equals zero.
g
+
(z(k) =
f
+
(z(k)) ∧ A
−
0
\ x(k)
A
−
1
\ x(k)
B
−
\ x(k)
with z(k) =
Ã
x(k)
x(k − 1)
u(k)
!
Theorem 3.11 The system 3.3 is compatible in the
horizon [k − 1, k] if and only if the cycle time of the
following function g
−
is lower than or equals zero.
g
−
(z(k) =
f
−
(z(k)) ⊕ A
+
0
\
0
x(k)
A
+
1
\
0
x(k)
B
+
\
0
x(k)
Corollary 3.12 If the system 3.3 is compatible in
the horizon [k − 1, k], then the following are equiva-
lent.
1. The cycle time of the following function g
+
is
greater than or equals zero.
ICINCO 2004 - SIGNAL PROCESSING, SYSTEMS MODELING AND CONTROL
332

2. the cycle time of the following function g
−
is
lower than or equals zero.
Finally, the final inequality set presents the form
g
−
(z(k)) ≤ z(k) ≤ g
+
(z(k)). The system of ((max,
+), (min, +)) type is reduced to a (−∞, (min, +))
(respectively ((max, +), +∞))) type and can be an-
alyzed by the theorem 3.10 (respectively the theorem
3.11). If the cycle time verifies the corresponding
condition of existence, it describes a compatible in-
terval descriptor system.
We propose now a generalization of the preceding
theorems on a wider horizon [k, k + h].
Theorem 3.13 The system 3.3 is compatible in the
horizon [k, k + h] if and only if the cycle time of the
function g
+
h
(z(k)) is greater than or equals zero.
z(k) =
x(k)
.
.
.
x(k + h − 1)
x(k + h)
u(k)
.
.
.
u(k + h − 1)
u(k + h)
, g
+
h
(z(k)) =
f
+
(x(k), x(k − 1), u(k))
.
.
.
f
+
(x(k + h − 1), x(k + h − 2), u(k + h − 1))
f
+
(x(k + h), x(k + h − 1), u(k + h))
T
.
.
.
T
T
∧ M
t
\ z(k) ∧ z(k + 1)
with M =
µ
M
11
M
12
M
21
M
22
¶
,
M
11
=
A
−
0
A
−
1
· · · T
T
.
.
.
.
.
.
.
.
.
.
.
. A
−
0
A
−
1
T · · · A
−
0
, M
21
=
B
−
T · · · T
T
.
.
.
.
.
.
.
.
. B
−
T · · · B
−
and M
12
= M
22
= T
Proof
For 0 ≤ j ≤ h we have :
(
x(k + j) ≤ f
+
(x(k + j), x(k + j − 1), u(k + j))
x(k + j − 1) ≤ x(k + j)
u(k + j − 1) ≤ u(k + j)
and A
−
0
⊗ x(k + j) ⊕ A
−
1
⊗ x(k + j − 1) ⊕ B
−
⊗
u(k + j) ≤ x(k + j)
we use the lemma 2.4, we arrive to :
⇐⇒
x(k + j) ≤ A
−
0
\ x(k + j)
x(k + j − 1) ≤ A
−
1
\ x(k + j)
u(k + j) ≤ B
−
\ x(k + j)
let x(k) = ² for k ≤ 0
A concatenation of the two last systems gives the fol-
lowing form : ∀ 0 ≤ j ≤ h
x(k + j) ≤
f
+
(x(k + j), x(k + j − 1), u(k + j))
∧A
−
0
\ x(k + j)∧
A
−
1
\ x(k + j + 1) ∧ x(k + j + 1)
u(k + j) ≤ B
−
\ x(k + j) ∧ u(k + j + 1)
and
x(k + h)
≤ f
+
(x(k + h), x(k + h − 1), u(k + h))
∧A
−
0
\ x(k + h)
u(k + h) ≤ B
−
\ x(k + h)
Lastly, the above system can be reduced to the
following form where the function g
+
h
is described in
the body of the theorem.
z(k) ≤ g
+
h
(z(k))
4 P-TIME PETRI NETS AND
ACCEPTABLE FUNCTIONING
4.1 Modelling
The p-time Petri nets make it possible to model the
discrete event dynamic systems with time constraints
of stay of the tokens inside the places. We associate
for each place a temporal interval.
Definition 4.1 (p-time Petri nets) The formal defi-
nition of p-Time PN is given by a pair < R, IS >
where R is a marked Petri nets
IS : P −→ (Q
+
∪ {0}) × (Q
+
∪ {∞})
p
i
−→ IS
i
= [a
i
, b
i
] with 0 ≤ a
i
≤ b
i
IS
i
is the static interval of residence time or dura-
tion of a token in place p
i
. The value a
i
is the min-
imum residence duration that the token must stay in
the place p
i
. Before this duration, the token is in state
of unavailability to firing the transition t
j
. The value
b
i
is a maximum residence duration after which the
token must thus leave the place p
i
. If not, the sys-
tem is found in a token-dead state. We conclude that
the token is available to firing the transition t
j
in the
interval time [a
i
, b
i
].
We will express the interval of shooting of each
transition from the system which will guarantee an
acceptable functioning. The assumption of function-
ing FIFO of the transition x
i
guarantees the condition
of non overtaking of the tokens between them. We
consider S the set of all input places to transition x
i
.
FROM DIOID ALGEBRA TO P-TIME EVENT GRAPHS
333
For the p-time PNs, the evolution is described by the
following inequations :
x
i
(k) ≥
L
j∈S
(x
j
(k − m
j
) + a
j
)
with a
i
the lower bound of an upstream place of x
i
and m the number of tokens present in an upstream
place of x
i
and
x
i
(k) ≤
V
j∈S
(x
j
(k − m
j
) + b
j
)
with b
i
the upper bound of an upstream place of x
i
.
In this part, we study p-time event graphs which is
an example of ((max, +), (min, +)) type of interval
descriptor system.
Remarks : - If one of the m tokens of a place p
l
dies
before firing transition x
i
, this death is translated
in the state equations. The new model becomes :
L
j∈S−{p
l
}
(x
j
(k − m
j
) + a
j
) ⊕ (x
j
(k − m
j
− 1) +
a
l
) ≤ x
i
(k) ≤
V
j∈S−{p
l
}
(x
j
(k−m
j
)+b
j
)∧(x
j
(k−
m
j
− 1) + b
l
)
- If we divide up each place which contains m to-
kens in m places, with one token by place, we can
obtain the equations on a shorter horizon. Only the
upstream place of x
i
has temporization [a, b]. For the
others, they have all the null time interval [0, 0].
4.2 Analysis of transition
synchronization in an horizon
The Petri nets make it possible to analyze several be-
havioral or structural properties related to the systems
which they model. We consider one of these behav-
ioral properties, the liveness which ensures the system
not to reach a state of blocking. This property depends
on initial marking. A state of blocking in PNs occurs
when we reach a marking which does not allow the
firing of any transition. Now we give the formal defi-
nition of liveness.
Definition 4.2 (liveness of a transition) A
transition x
i
is live for an initial marking M
0
if,
for any marking M
j
accessible since M
0
there is a
sequence of firing S starting from M
j
which includes
the transition x
i
Definition 4.3 (liveness of a petri net) For a given
initial marking, a PN is live if for any accessible
∀ M ∈ E(M
0
), ∀ p ∈ P, ∃ S Á M
S
−→ M
0
and t
∈ S
Classically, one of the methods which allow to
check liveness is analysis by enumeration. This
approach consists in building the coverability graph if
the number of markings is finished, or in building the
coverability tree if the number of markings is infinite.
For temporal PNs, checking and making study of the
liveness property becomes more difficult since the
latter depends not only on initial marking but also
on the intervals of times related to the graph. It thus
proves that the use of the method by enumeration
is very difficult. Indeed, the passage of a state to
another is related either to the firing of a transition or
to the evolution from time. Thus, a consequence is
combinative explosion of the coverability graph.
As p-time event graphs can be modelled under ((max,
+),(min, +)) interval descriptor system, we propose to
apply the results presented in the part 3 to detect any
non-synchronization of transitions in an horizon. The
following definition of acceptable functioning on an
horizon will allow us to express easier the approach.
In a practical point of view, the deaths of token
represent the lost of ressources and must naturally be
avoid. Consequently, if we check the acceptable func-
tioning, we guarantee a correct behaviour. Moreover,
we can deduce that the corresponding system is live
on the same horizon. Let us notice that the reverse
is not true: the existence of a non-synchronization
of a transition entails the death of at least one token
but the liveness of the petri net can be ensured by the
other tokens.
Definition 4.4 (acceptable functioning) We call an
acceptable functioning of a p-time PN any dynamic
evolution of the system without leading to a mark-
dead state or a blocking state.
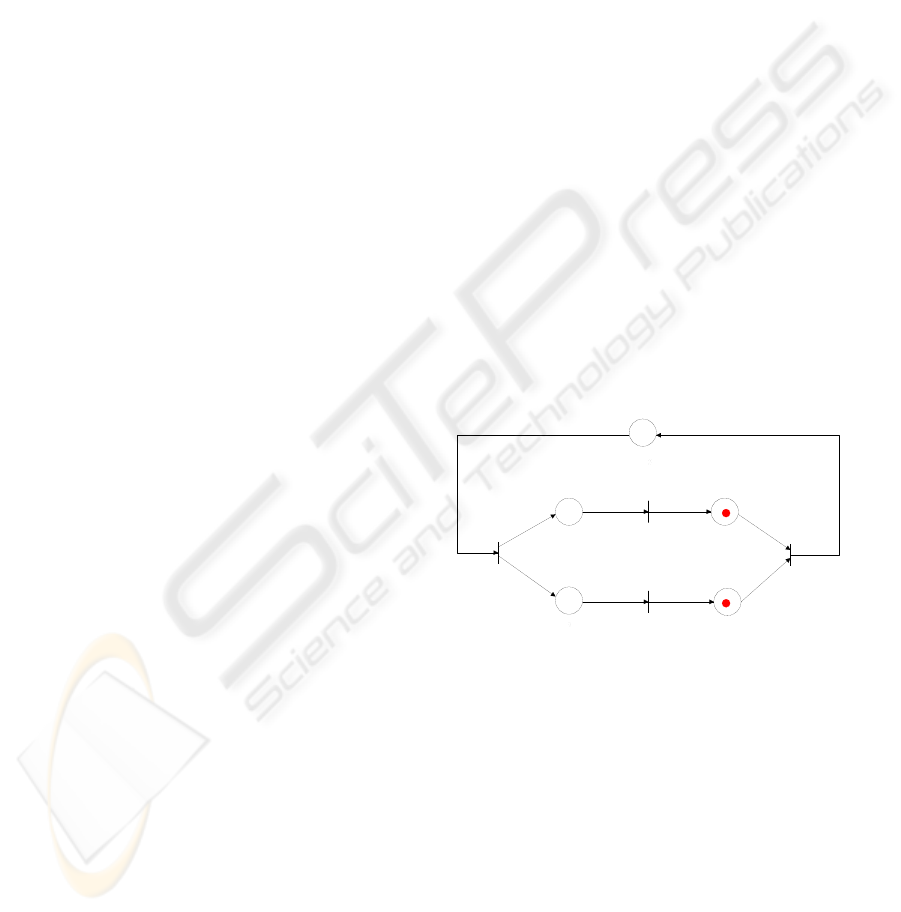
[ a
1
b
1
]
[ a
2
b
2
] [ a
4
b
4
]
[ a
3
b
3
]
x
1
x
2
P
1
P
4
P
3
P
2
x
3
x
4
[ a
5
b
5
]
P
5
Figure 1: a p-time event graph (autonomous case)
Example
We consider the example of the figure 1 which will
enable us to illustrate our approach. Initially we can
check easily that the logical graph (without taking ac-
count of temporizations) is quite live. By considering
temporizations related to each place, we can note that
in spite of an initial marking which ensures the live-
ness of the logical graph, the temporal graph can be
in a state of total blocking. Showing these behaviours,
several cases can arise while acting on the bounds of
the intervals related to the places.
The first step of our approach is to model the system
by recurring state equations in the following form:
ICINCO 2004 - SIGNAL PROCESSING, SYSTEMS MODELING AND CONTROL
334

x
2
(k) + a
5
≤ x
1
(k) ≤ x
2
(k) + b
5
(x
3
(k − 1) + a
3
) ⊕ (x
4
(k − 1) + a
4
) ≤ x
2
(k)
≤ (x
3
(k − 1) + b
3
) ∧ (x
4
(k − 1) + b
4
)
x
1
(k) + a
1
≤ x
3
(k) ≤ x
1
(k) + b
1
x
1
(k) + a
2
≤ x
4
(k) ≤ x
1
(k) + b
2
(2)
The second step consists to divide up the system 2,
and to put it in the form x ≤ f(x). Thus we arrive at
the following system:
x
1
(k) ≤ (x
2
(k) + b
5
) ∧ (x
4
(k) − a
2
)
∧(x
3
(k) − a
1
)
x
1
(k + 1) ≤ (x
2
(k + 1) + b
5
) ∧ (x
4
(k + 1)
−a
2
) ∧ (x
3
(k + 1) − a
1
)
.
.
.
x
4
(k) ≤ (x
2
(k) − a
4
) ∧ (x
1
(k) + b
3
)
x
4
(k + 1) ≤ (x
1
(k + 1) + b
3
)
Case 1:
Now we present the first case where we fix the
bounds of the intervals as follows : [a
1
b
1
] = [0, 1],
[a
2
b
2
] = [5, 6], [a
3
b
3
] = [0, 1], [a
4
b
4
] = [0, 1] and
[a
5
b
5
] = [3, 4].
We calculate the spectral vector of f, and we apply
the theorem 3.13. We arrive at the following results:
χ(x
2
(1)) =
1
2
χ(x
1
(1)) =
1
2
χ(x
2
(2)) = −
3
4
χ(x
1
(2)) = −
3
4
We notice that χ
µ
x
2
(1)
x
1
(1)
¶
≥ 0 and
χ
µ
x
2
(2)
x
1
(2)
¶
< 0
The system is live for the first step (k = 1). It
after loses its tokens (dead tokens) and its liveness
property is not assured any more.
Case 2:
A second case is to consider these intervals such as
[a
3
b
3
]∩ [a
4
b
4
] = ∅. The calculation of the spectral
vector will enable us to show the non-liveness of
the system in this case. We consider the following
temporizations : [a
1
b
1
] = [3, 4], [a
2
b
2
] = [3, 4], [a
3
b
3
] = [1, 2], [a
4
b
4
] = [6, 7] and [a
5
b
5
] = [4, 5]. We
obtain the following results :
χ(x
2
(1)) = −
12
5
χ(x
1
(1)) = −
12
5
Then, in this case, the synchronization cannot be
make to firing transition x
2
for the first time. The
two tokens will die, the system is in state of blocking
from the beginning because χ
µ
x
2
(1)
x
1
(1)
¶
< 0.
5 CONCLUSION
In this paper, we have introduced a new model, the in-
terval descriptor system based on (min, max, +) func-
tions and we have shown that p-time event graphs can
be modelled in this form. The analysis of the spectral
vector makes it possible to study the correct synchro-
nization of the transitions. We have applied our ap-
proach to an example in section 4. A perspective will
be to specify the token-deads and then to analyse the
complete liveness of the model. We will show that
each token-dead produces a variation in the model
which contains the conditions of its own evolutions.
REFERENCES
Cheng, Y. and Zheng, D.-Z. (2002). On the cycle time of
non-autonomous min-max systems. In IEEE.
F. Baccelli, G. Cohen, G. O. and Quadrat, J. (1992). Syn-
chronization and linearity. An Algebra for Discrete
Event Systems. Wiley, New York.
Gaubert, S. and Gunawardena, J. (1998). the duality the-
orem for min-max functions. In CRAS, t. 326, S
´
erie
I43-48.
J. Cochet-Terrasson, S. G. and Gunawardena, J. (1999). A
constructive fixed point theorem for min-max func-
tions. In Dynamics and Stability of Systems, Vol. 14
N
◦
4, 407-433.
Walkup, E. A. and Borriello, G. (1998). A general linear
max-plus solution technique. In Idempotency, pub-
lisher Jeremy Guawardena.
FROM DIOID ALGEBRA TO P-TIME EVENT GRAPHS
335
