
PREDICTIVE CONTROL BY LOCAL VISUAL DATA
Mobile Robot Model Predictive Control Strategies Using Local Visual
Information and Odometer Data
Lluis Pacheco and Ningsu Luo
Institute of Informatics and Applications, University of Girona, Av. Ll. Santaló s/n, Girona, Spain
Keywords: Autonomous mobile robots, computer vision control, system identification, model based control, predictive
control, trajectory planning, obstacle avoidance, robot vision.
Abstract: Nowadays, the local visual perception research, applied to autonomous mobile robots, has succeeded in
some important objectives, such as feasible obstacle detection and structure knowledge. This work relates
the on-robot visual perception and odometer system information with the nonlinear mobile robot control
system, consisting in a differential driven robot with a free rotating wheel. The description of the proposed
algorithms can be considered as an interesting aspect of this report. It is developed an easily portable
methodology to plan the goal achievement by using the visual data as an available source of positions.
Moreover, the dynamic interactions of the robotic system arise from the knowledge of a set of experimental
robot models that allow the development of model predictive control strategies based on the mobile robot
platform PRIM available in the Laboratory of Robotics and Computer Vision. The meaningful contribution
is the use of the local visual information as an occupancy grid where a local trajectory approaches the robot
to the final desired configuration, while avoiding obstacle collisions. Hence, the research is focused on the
experimental aspects. Finally, conclusions on the overall work are drawn.
1 INTRODUCTION
The research presented in this paper addresses to a
kind of differential driven WMRs (wheeled mobile
robots). Nowadays, the computer vision techniques
applied to WMR have solved the problem of
obstacle detection by using different methods as
stereo vision systems, optical flow or DFF (depth
from focus). Stereo vision systems seem to provide
the easiest cues to infer scene depth (Horn, 1998).
The optical flow techniques used in WMR result in
several applications as i.e. structure knowledge,
obstacle avoidance, or visual servoing (Campbell, et
al., 2004). The DFF methods are also suitable for
WMR. For example, three different focused images
were used, with almost the same scene, acquired
with three different cameras
(Nourbakhsh, et al.,
1997). In this work, it is supposed that available
obstacle positions are provided by using computer
vision systems. In this context, the allowed
navigation control signals should achieve the
obstacle avoidance as well as the final desired
coordinates. Scientific community has developed
several studies in this field. Based on the dynamic
window approach with available robot speeds, the
reactive avoidance collisions, safety stop and goal
can be achieved using the dynamic constraints of
WMR (Fox, et al., 1997).
Rimon and Koditschek
(1992) presented the methodologies for the exact
motion planning and control, based on the artificial
potential fields where the complete information
about the free space and goal are encoded. Some
approaches on mobile robots propose the use of
potential fields, which satisfy the stability in a
Lyapunov sense, in a short prediction horizon
(Ögren and Leonard, 2005). The main contribution
of this paper is the use of the visual information as a
dynamic window where the collision avoidance and
safety stop can be planned. Thus, local visual data,
instead of artificial potential fields, are used in order
to achieve the Lyapunov stability. The use of MPC
(model predictive control) with available on-robot
information is possible. Moreover, the local visual
information is used as an occupancy grid that allows
planning feasible trajectories towards the desired
objective. The knowledge of the objective allows the
optimal solution of the local desired coordinates
based on the acquired images. The sensor fusion is
done using visual perception, as the meaningful
source of information in order to accomplish with
the robot tasks. Other data provided by the encoder-
based odometer system are also considered.
259
Pacheco L. and Luo N. (2007).
PREDICTIVE CONTROL BY LOCAL VISUAL DATA - Mobile Robot Model Predictive Control Strategies Using Local Visual Information and Odometer
Data.
In Proceedings of the Fourth International Conference on Informatics in Control, Automation and Robotics, pages 259-266
DOI: 10.5220/0001638102590266
Copyright
c
SciTePress
This paper is organized as follows: Section 1
gives a brief presentation about the aim of the
present work. In the Section 2, the platform is
introduced as an electromechanical system. This
section also describes the experiments to be realized
in order to find the parametric model of the robot
suitable for designing and implementing MPC
methods. In the Section 3, the use of visual data is
presented as a horizon where optimal trajectories can
be planned. Section 4 presents the MPC strategies
used for achieving the path following of the
reference trajectories. In the Section 5, some
conclusions are made with special attention paid into
the future research works.
2 ROBOT AND BASIC CONTROL
METHODS
This section gives some description on the main
robot electromechanical and sensorial systems of the
platform tested in this work. Hence, the WMR
PRIM, available in our lab, has been used in order to
test and orient the research. The experimental
modelling methodologies as well as the model
predictive control are also introduced.
2.1 Electromechanical and Sensorial
System of the Robot
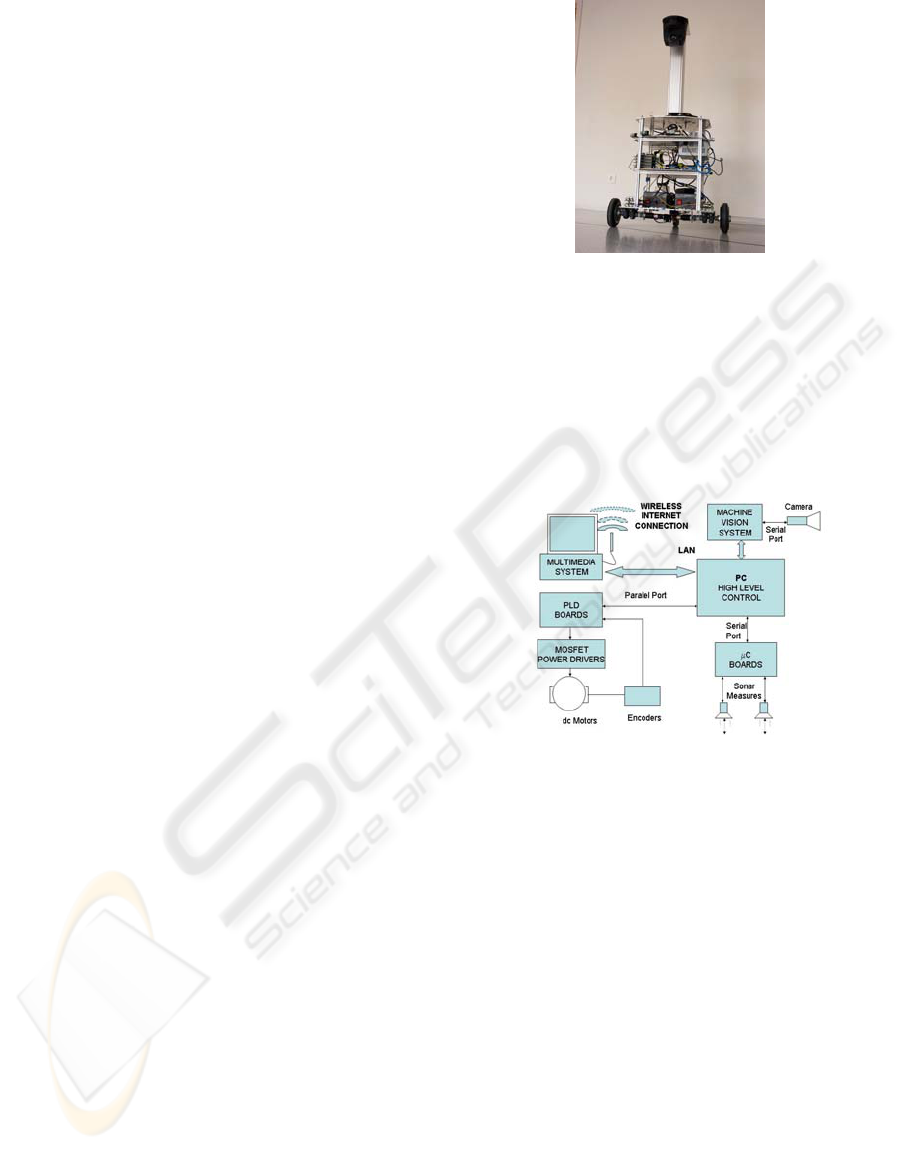
Figure 1 shows the robot PRIM used in the research
work. The mechanical structure of the robot is made
of aluminum, with two independent wheels of 16cm
diameters actuated by two DC motors. The distance
between two wheels is 56.4cm. A third spherical
omni-directional wheel is used to guarantee the
system stability. The maximum continuous torque of
each motor is 131mNm. The proportion of gear
reduction for each motor is 86:1 and thus the total
force actuating on the robot is near 141N. Shaft
encoders with 500 counts/rev are placed at the motor
axes, which provide 43000 counts for each turn of
the wheel. A set of PLD (programmable logic
device) boards is connected to the digital outputs of
the shaft encoders. The printed circuits boards
(PCB) are used to measure the speed of each motor
at every 25ms.
An absolute counter provides the counts in
order to measure the robot position by the odometer
system. Another objective of these boards is to
generate a signal of 23khz PWM for each motor.
The communication between the central digital
can computer and the boards is made through the
thus it parallel port. The speed is commanded by a
byte and generate from 0 to 127 advancing or rever-
Figure 1: The robot PRIM used in this work.
sing speed commands. The maximal speed is near
0.5m/s. A set of microcontroller boards (MCS-51) is
used to read the information available from different
connected sensors. The rate of communication with
these boards is 9600 b/s. Figure 2 shows the
electronic and sensorial system blocks. The data
gathering and the control by digital computer is set
to 100ms.
Figure 2: The sensorial and electronic system blocs.
The system flexibility is increased with the
possibility of connecting with other computer
systems through a local LAN. In this research, it is
connected to a machine vision system that controls a
colour camera EVI-D70P-PAL through the VISCA
RS232-C control protocol. For instance, the camera
configuration used in this work is of a horizontal
field of view of 48º, and a vertical field of 37º. The
focus, pan and tilt remain fixed under present
configuration. Hence, the camera pose is set to
109cm from the floor with a tilt angle of 32º. The
local desired coordinates, obtained by the visual
perception information, are transmitted to the control
unit connecting the USB port to the LAN.
2.2 Experimental Model
The parametric identification process is based on
black box models (Lju, 1989), (Norton, 1986) and
(Van Overschee, Moor, 1996). Thus, the transfer
functions are related to a set of polynomials that
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
260
allow the use of analytic methods in order to deal
with the problem of controller design. The
nonholonomic system dealt with in this work is
considered initially as a MIMO (multiple input
multiple output) system, which is composed of a set
of SISO subsystems with coupled dynamic influence
between two DC motors. The approach of multiple
transfer functions consists in making the
experiments with different speeds. In order to find a
reduced-order model, several studies and
experiments have been done through the system
identification and model simplification.
2.2.1 System Identification
The parameter estimation is done by using a PRBS
(Pseudo Random Binary Signal) as excitation input
signal. It guarantees the correct excitation of all
dynamic sensible modes of the system along the
spectral range and thus results in an accurate
precision of parameter estimation. The experiments
to be realized consist in exciting two DC motors in
different (low, medium and high) ranges of speed.
The ARX (auto-regressive with external input)
structure has been used to identify the parameters of
the robot system. The problem consists in finding a
model that minimizes the error between the real and
estimated data. By expressing the ARX equation as a
lineal regression, the estimated output can be written
as:
θϕ
=y
ˆ
(1)
with being the estimated output vector, θ the
vector of estimated parameters and φ the vector of
measured input and output variables. By using the
coupled system structure, the transfer function of the
robot can be expressed as follows:
y
ˆ
where Y
R
and Y
L
represent the speeds of right and
left wheels, and U
R
and U
L
the corresponding speed
commands, respectively. In order to know the
dynamics of robot system, the matrix of transfer
function should be identified. Figure 3 shows the
speed response of the left wheel corresponding to a
left PBRS input signal.
Figure 3: Left speed output for a left PRBS input signal.
The treatment of experimental data is done
before the parameter estimation. In concrete, it
includes the data filtering, using the average value of
five different experiments with the same input
signal, the frequency filtering and the tendency
suppression. The system is identified by using the
identification toolbox “ident” of Matlab for second
order models. The following continuous transfer
function matrix for medium speed is obtained:
(3)
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⎟
⎟
⎟
⎟
⎠
⎞
⎜
⎜
⎜
⎜
⎝
⎛
++
++
++
++
++
++
++
++
=
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
L
R
L
R
U
U
ss
ss
ss
ss
ss
ss
ss
ss
Y
Y
89.484.5
12.572.111.0
89.484.5
28.041.326.0
89.484.5
32.027.002.0
89.484.5
46.482.435.0
2
2
2
2
2
2
2
2
It is shown by simulation results that the obtained
model fits well with the experimental data.
2.2.2 Simplified Model of the System
This section studies the coupling effects and the way
for obtaining a reduced-order dynamic model. It is
seen from (3) that the dynamics of two DC motors
are different and the steady gains of coupling terms
are relatively small (less than 20% of the gains of
main diagonal terms). Thus, it is reasonable to
neglect the coupling dynamics so as to obtain a
simplified model.
(2)
RRRLRR
LRLLLL
YGGU
YGGU
⎛⎞⎛ ⎞⎛ ⎞
=
⎜⎟⎜ ⎟⎜ ⎟
⎝⎠⎝ ⎠⎝ ⎠
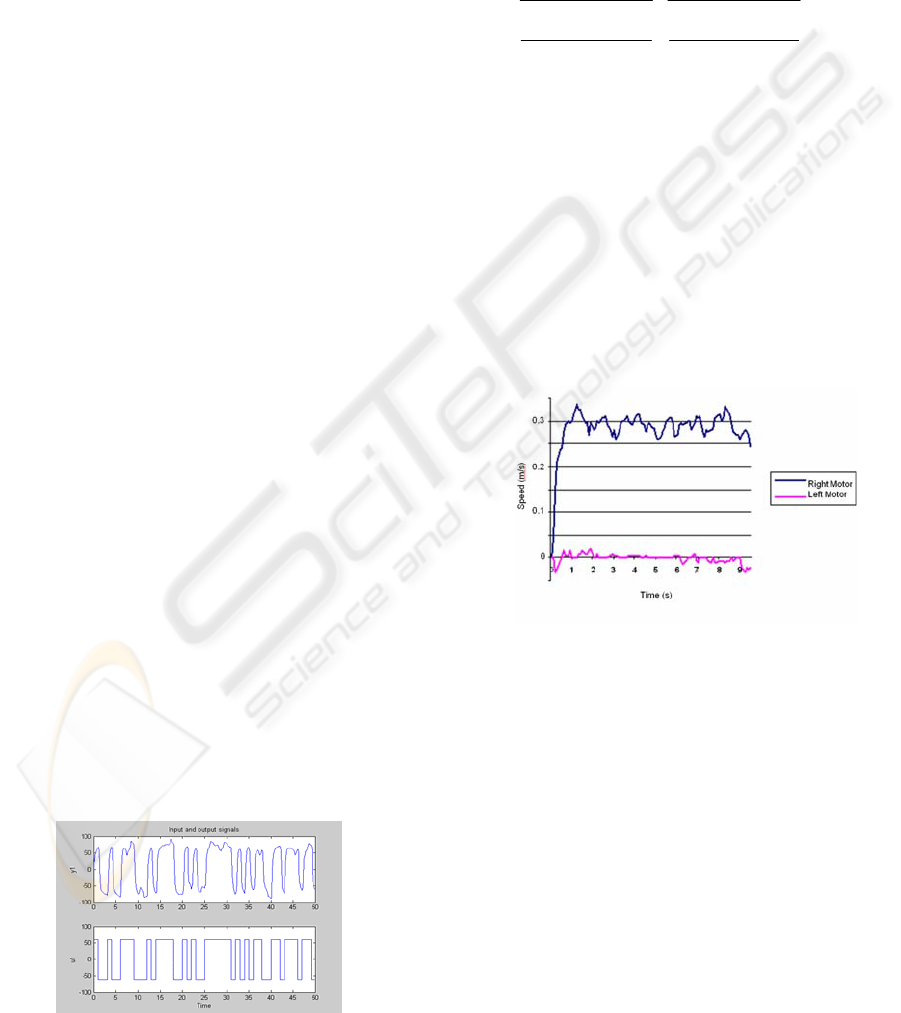
Figure 4: Coupling effects at the left wheel.
In order to verify it from real results, a set of
experiments have been done by sending a zero speed
command to one motor and other non-zero speed
commands to the other motor. In Figure 4, it is
shown a response obtained on the left wheel, when a
medium speed command is sent to the right wheel.
The experimental result confirms the above facts.
The existence of different gains in steady state is
also verified experimentally. Finally, the order
reduction of system model is carried out trough the
analysis of pole positions by using the method of
root locus. Afterwards, the system models are
validated through the experimental data by using the
PBRS input signal. A two dimensional array with
three different models for each wheel is obtained.
Hence, each model has an interval of validity where
the transfer function is considered as linear.
PREDICTIVE CONTROL BY LOCAL VISUAL DATA - Mobile Robot Model Predictive Control Strategies Using Local
Visual Information and Odometer Data
261
2.3 Odometer System Expression
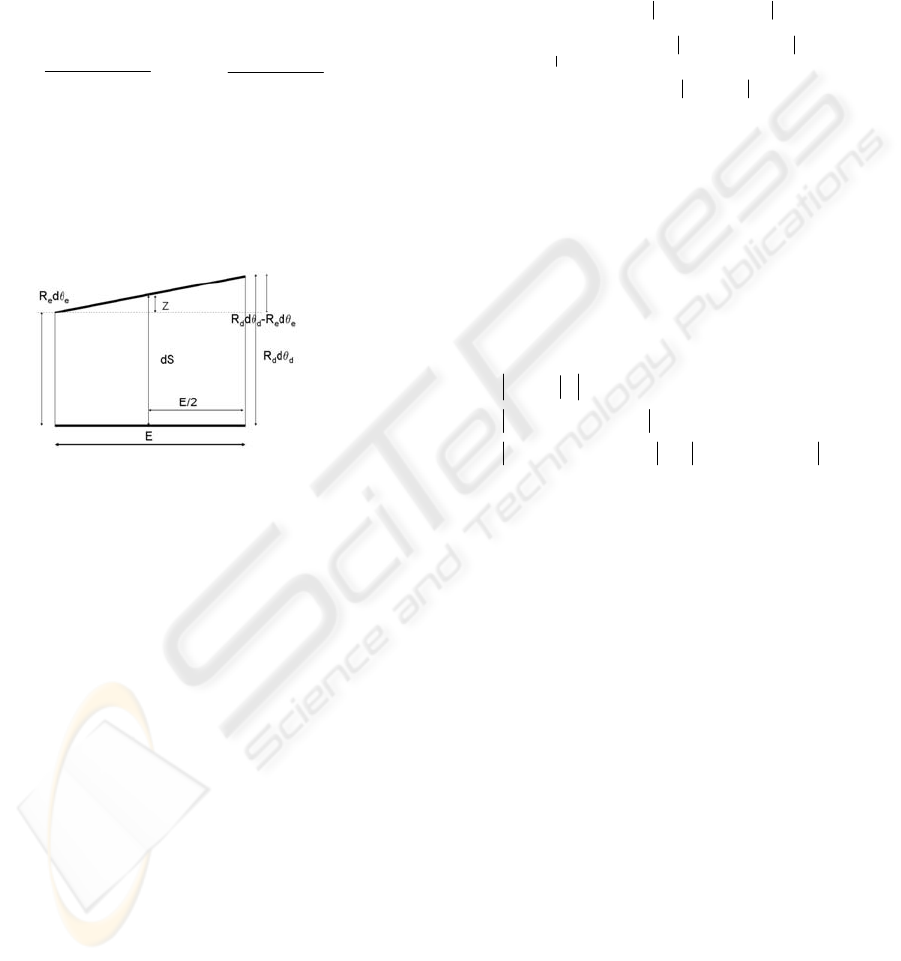
Denote (x, y, θ) as the coordinates of position and
orientation, respectively. The Figure 5 describes the
positioning of robot as a function of the radius of left
and right wheels (R
e
, R
d
), and the angular
incremental positioning (θ
e
, θ
d
), with E being the
distance between two wheels and dS the incremental
displacement of the robot. The position and angular
incremental displacements are expressed as:
The coordinates (x, y, θ) can be expressed as:
Figure 5: Positioning of the robot as functions of the
angular movement of each wheel.
Thus, the incremental position of the robot can be
obtained through the odometer system with the
available encoder information obtained from (4) and
(5).
2.4 Model Predictive Control
The model predictive control, MPC, has many
interesting aspects for its application to mobile robot
control. It is the most effective advanced control
technique, as compared to the standard PID control,
that has made a significant impact to the industrial
process control (Maciejowski, 2002). Recently, real
time mobile robot MPC implementations have been
developed using global vision sensing (Gupta,
Messom et al., 2005). In (Küne, Lages et al., 2005),
it was studied the MPC based optimal control useful
for the case when nonlinear mobile robots are used
under several constraints, as well as the real time
implementation possibilities when short prediction
horizons are used. In general, the global trajectory
planning becomes unfeasible since the sensorial
system of some robots is just local. By using a MPC,
the idea of the receding horizon can deal with the
local sensor information. In this way, it is proposed a
local model predictive control, LMPC, in order to
use the available visual data in the navigation
strategies for the goal achievement.
The MPC is based on minimizing a cost
function, related to the objectives, through the
selection of the optimal inputs. In this case, the cost
function can be expressed as follows:
Denote X
d
=(x
d
,y
d
,
θ
d
) as the desired coordinates. The
first term of (6) is referred to the final desired
coordinate achievement, the second term to the
trajectory to be followed, and the last one to the
input signals minimization. The parameters P, Q and
R are weighting parameters. X(k+n|k) represents the
terminal value of the predicted output after the
horizon of prediction n and X(k+i|k) represents the
predicted output values within the prediction
horizon. The system constrains are also considered:
The limitation of the input signal is taken into
account in the first constraint. The second constraint
is related to the obstacle points where the robot
should avoid the collision. The last one is just a
convergence criterion.
3 THE HORIZON OF LOCAL
VISUAL PERCEPTION
The use of sensor information as a useful source to
build 2D environment models consists of a free or
occupied grid proposed by (Elfes, 1989). The
knowledge of occupancy grids knowledge has been
used for static indoor mapping with a 2D grid
(Thrun, 2002). In other works of multidimensional
grids, multi target tracking algorithms are employed
by using obstacle state space with Bayesian filtering
techniques (Coué et al., 2006). In this work it is
proposed the use of the local visual information
available from the camera as a local map that has
enough information in order to achieve a global
objective. The occupancy grid can be obtained in
real time by using computer vision methods. The use
of the optical flow has been proposed as a feasible
2
eedd
dRdR
dS
θ
θ
+
=
()
4
E
dRdR
d
eedd
θ
θ
θ
−
=
()
()
()
[]
()
[]
()
[]
()
[]
()()
(6) min,
1
0
1
1
0
1
⎪
⎪
⎪
⎪
⎭
⎪
⎪
⎪
⎪
⎬
⎫
⎪
⎪
⎪
⎪
⎩
⎪
⎪
⎪
⎪
⎨
⎧
+++
−+−++
−+−+
=
∑
∑
−
=
−
=
⎭
⎬
⎫
⎩
⎨
⎧
=
−=
+
kikRUkikU
XkikXQXkikX
XknkXPXknkX
mnJ
m
j
T
n
i
d
T
d
d
T
d
j
mj
kikU
(
)
[][]
[][][][]
()
7
,,,,
,,
)1,0[
2
1
⎪
⎪
⎭
⎪
⎪
⎬
⎫
⎪
⎪
⎩
⎪
⎪
⎨
⎧
−≤−
≥−
∈≤+
++
++
ddkkddnknk
ooikik
yxyxyxyx
Gyxyx
GkikU
α
α
()
()
()
θθθ
θθ
θ
θ
d
ddSyy
ddSxx
nn
nnn
nnn
+=
++=
++=
−
−−
−−
1
11
11
5sin
cos
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
262
obstacle avoidance method; as i.e., (Campbell et al.,
2004), in which it was used a Canny edge detector
algorithm that consists in Gaussian filtering and
edge detection by using Sobel filters. Thus, optical
flow was computed over the edges providing
obstacle structure knowledge. The present work
assumes that the occupancy grid is obtained by the
machine vision system. It is proposed an algorithm
that computes the local optimal desired coordinate as
well as the local trajectory to be reached. The
research developed assumes indoor environments as
well as flat floor constraints. However, it can be also
applied in outdoor environments.
This section presents firstly the local map
relationships with the camera configuration and
poses. Hence, the scene perception coordinates are
computed. Then, the optimal control navigation
strategy is presented, which uses the available visual
data as a horizon of perception. From each frame, it
is computed the optimal local coordinates that
should be reached in order to achieve the desired
objective. Finally, the algorithm dealing with the
visual data process is explained. Some involved
considerations are also made.
3.1 Scene Perception
The local visual data provided by the camera are
used in order to plan a feasible trajectory and to
avoid the obstacle collision. The scene available
coordinates appear as an image, where each pixel
coordinates correspond to a 3D scene coordinates. In
the case attaining to this work, flat floor surface is
assumed. Hence, scene coordinates can be computed
using camera setup and pose knowledge, and
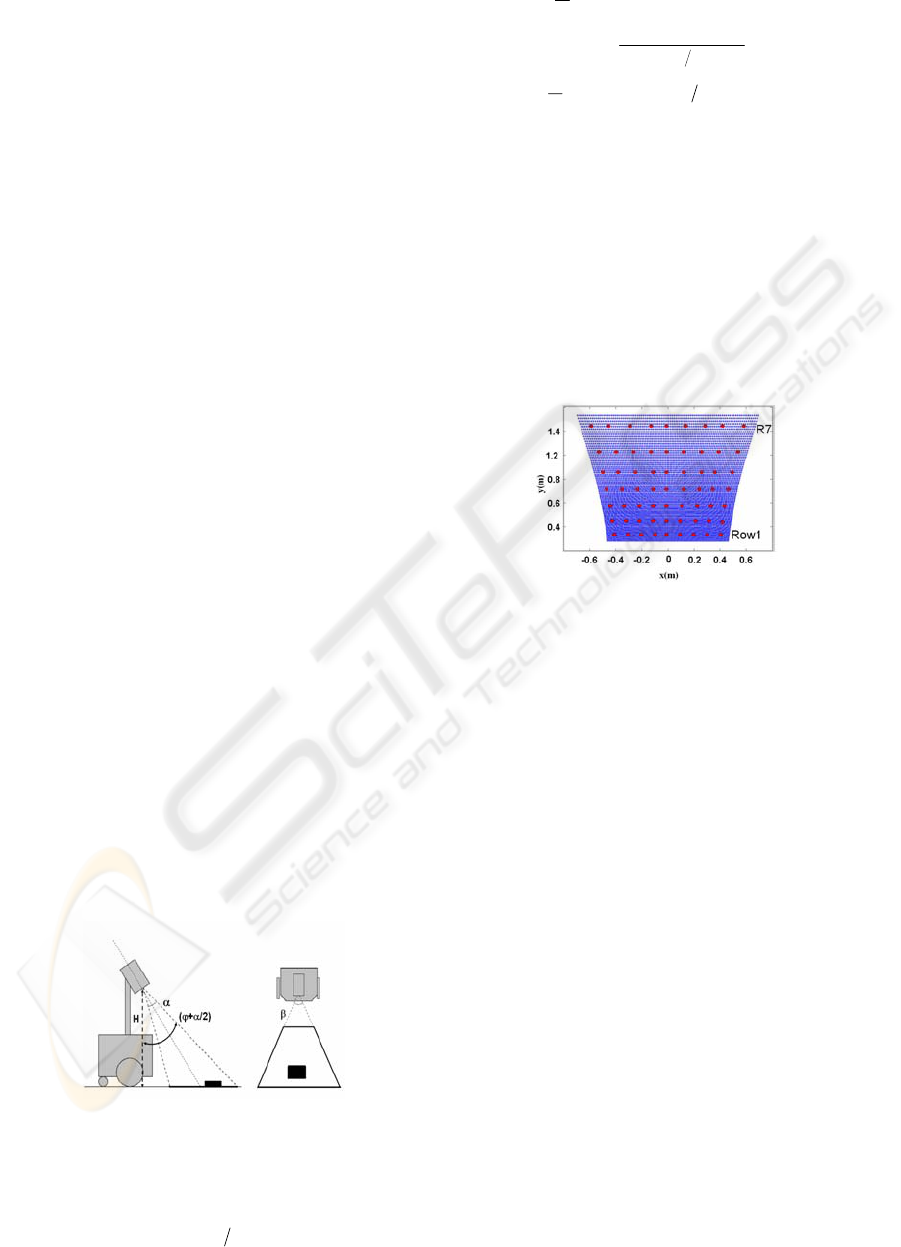
assuming projective perspective. The Figure 6 shows
the robot configuration studied in this work. The
angles
α
,
β
and
ϕ
are related to the vertical and
horizontal field of view, and the tilt camera pose,
respectively. The vertical coordinate of the camera is
represented by H.
Figure 6: Fixed camera configuration including vertical
and horizontal field of view, and vertical tilt angle.
Using trigonometric relationships, the scene
coordinates can be computed:
(
)
(8)
α
α
ϕ
Δ+
−
= 2tanHy
j
(
)
R
R
K
j
≤≤=Δ
j
K0
α
α
()
()
(9)
β
ααϕ
Δ
Δ+−
±= tan
2cos
,
H
x
ji
()
2C
C
K
i
≤≤=Δ
i
K0
β
β
The K
i
and K
j
are parameters used to cover the
image pixel discrete space. Thus, R and C represent
the image resolution through the total number of
rows and columns. It should be noted that for each
row position, which corresponds to scene
coordinates y
j
, there exist C column coordinates x
i,j
.
The above equations provide the available local map
coordinates when no obstacle is detected. Thus,
considering the experimental setup reported in
Section 2, the local on-robot map depicted in Figure
7 is obtained.
Figure 7: Local visual perception free of obstacles, under
96
x72 or 9x7 low resolution grids.
3.2 Local Optimal Trajectory
The available information provided by the camera is
considered as a local horizon where the trajectory is
planned. Hence, a local map with free obstacle
coordinates is provided. In this sense, the available
local coordinates are shown in Figure 7. It is noted
that low resolution scene grids are used in order to
speed up the computing process.
The minimization of a cost function, which
consists in the Euclidean distance between the
desired coordinates and the available local scene
coordinates, can be optimally solved by finding the
local desired coordinates. Hence, the algorithm
explores the image pixels, IMAGE(i,j), considering
just the free obstacle positions. Once the local
desired point is obtained, a trajectory between the
robot coordinates, at the instant when the frame was
acquired, and the optimal scene coordinates is
planned. Thus, the current robot coordinates are
related to this trajectory, as well as to control
methods.
PREDICTIVE CONTROL BY LOCAL VISUAL DATA - Mobile Robot Model Predictive Control Strategies Using Local
Visual Information and Odometer Data
263
3.3 Algorithms and Constraints
In this subsection, some constraints that arise from
the experimental setup are considered. The narrow
field of view and the fixed camera configuration
make necessary that the robot stays oriented towards
the desired coordinates. WMR movements are
planned based on the local visual data, and always in
advancing sense. Hence, the algorithms provide
local desired coordinates to the control unit. If WMR
orientation is not appropriate, the robot could turn
around itself until a proper orientation is found.
Another possibility is to change the orientation in
advancing sense by the use of the trajectory/robot
orientation difference as the cost function computed
over the available visual data. This subsection
proposes the local optimal suggested algorithms that
have as special features an easy and fast
computation. Some methods are presented in order
to overcome the drawback of local minimal failures.
3.3.1 The Proposed Algorithms
The proposed algorithm, concerning to obtaining the
local visual desired coordinates, consists of two
simple steps:
To obtain the column corresponding to best
optimal coordinates that will be the local desired
X
i
coordinate.
To obtain the closer obstacle row, which will be
the local desired Y
j
coordinate.
The proposed algorithm can be considered as a first
order approach, using a gross motion planning over
a low resolution grid. The obstacle coordinates are
increased in size with the path width of the robot
(Schilling, 1990). Consequently, the range of
visually available orientations is reduced by the path
width of WMR. Other important aspects as visual
dead zone, dynamic reactive distance and safety stop
distance should be considered. The dynamic reactive
distance, which should be bigger than the visual
dead zone and safety stop distance, is related to the
robot dynamics and the processing time for each
frame. Moreover, the trajectory situated in the visual
map should be larger than a dynamic reactive
distance. Thus, by using the models corresponding
to the WMR PRIM, three different dynamic reactive
distances are found. As i.e. considering a vision
system that processes 4 frames each second, using a
model of medium speed (0.3m/s) with safety stop
distance of 0.25m and an environment where the
velocity of mobile objects is less than 0.5m/s, a
dynamic reactive distance of 0.45m is obtained.
Hence, the allowed visual trajectory distance will set
the speed that can be reached. The desired local
coordinates are considered as final points, until not
any new optimal local desired coordinates are
provided. The image information is explored starting
at the closer positions, from bottom to upside. It is
suggested to speed up the computing process based
on a previously calculated LUT, (look up table),
with the scene floor coordinates corresponding to
each pixel.
3.3.2 Local Minimal Failures
The local minimal failures will be produced when a
convergence criterion, similar to that used in (7), is
not satisfied. Thus, the local visual map cannot
provide with closer optimal desired coordinates,
because obstacles blocks the trajectory to the goal.
In these situations, obstacle contour tracking is
proposed. Hence, local objectives for contour
tracking are used, instead of the goal coordinates, as
the source for obtaining a path until the feasible goal
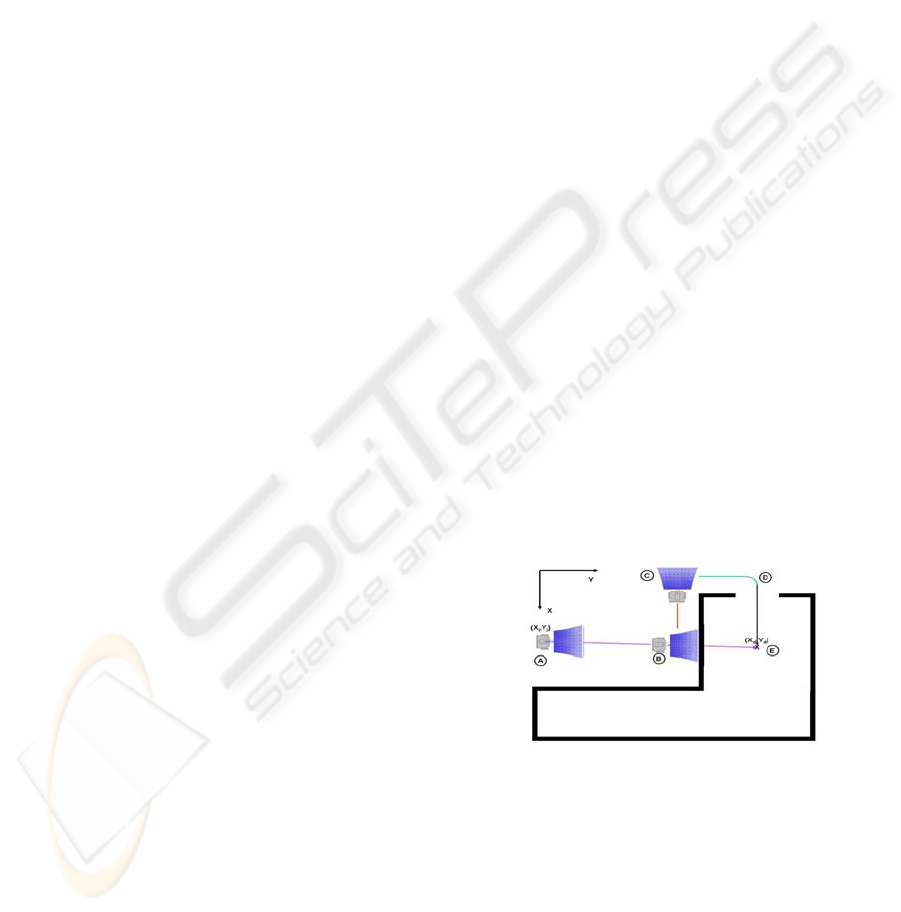
trajectories are found. The Figure 8 shows an
example with local minimal failures. It is seen that
in A, the optimal trajectory is a straight line between
A and E. However, an obstacle is met at B, and local
minimal failure is produced at B. When this is
produced, no trajectory can approach to the desired
goal, (Xd, Yd). Then, obstacle con-tour tracking is
proposed between B and C. Once C is attained, local
minimization along coordinates Y is found and the
trajectory between C and D is planned. From D to E
local minimums are reached until the final goal is
achieved. It should be noted that once B is reached,
the left or right obstacle contour are possible.
However, the right direction will bring the robot to
an increasing Y
j
distance.
Figure 8: Example of local minimal failures produced at B
with A being the starting point and E the desired goal.
The robot follows the desired goals except when the
situation of obstacle contour tracking is produced,
and then local objectives are just the contour
following points. The local minimal failures can be
considered as a drawback that should be overcome
with more efforts. In this sense, the vision
navigation strategies (Desouza, Kak, 2002) should
be considered. Hence, it is proposed the use of
feasible maps or landmarks in order to provide local
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
264

objective coordinates that can be used for guiding
the WMR to reach the final goal coordinates.
4 LMPC ALGORITHMS
This section gives the LMPC algorithms by using
the basic ideas presented in the Section 2. The
LMPC algorithm is run in the following steps:
To read the actual position
To minimize the cost function and to obtain a
series of optimal input signals
To choose the first obtained input signal as the
command signal.
To go back to the step 1 in the next sampling
period
The minimization of the cost function is a
nonlinear problem in which the following equation
should be verified:
()()()
(
)
10 yfxfyxf
β
α
β
α
+≤+
It is a convex optimization problem caused by the
trigonometric functions used in (5), (Boyd,
Vandenberghe, 2004). The use of interior point
methods can solve the above problem (Nesterov,
Nemirovskii, 1994). Among many algorithms that
can solve the optimization, the descent methods are
used, such as the gradient descent method among
others, (Dennis, et al. 1996), (Ortega, et al. 2000).
The gradient descent algorithm has been
implemented in this work. In order to obtain the
optimal solution, some constraints over the inputs
are taken into account:
The signal increment is kept fixed within the
prediction horizon.
The input signals remain constant during the
remaining interval of time
.
The input constraints present advantages such like
the reduction in the computation time and the
smooth behavior of the robot during the prediction
horizon. Thus, the set of available input is reduced to
one value. In order to reduce the optimal signal
value search, the possible input sets are considered
as a bidimensional array, as shown in Figure 9.
Figure 9: Optimal interval search.
Then, the array is decomposed into four zones, and
the search is just located to analyze the center points
of each zone. It is considered the region that offers
better optimization, where the algorithm is repeated
for each sub-zone, until no sub-interval can be
found. Once the algorithm is proposed, several
simulations have been carried out in order to verify
the effectiveness, and then to make the
improvements. Thus, when only the desired
coordinates are considered, the robot could not
arrive in the final point. Figure 10 shows that the
inputs can minimize the cost function by shifting the
robot position to the left.
Figure 10: The left deviation is due to the greater left gain
of the robot.
The reason can be found in (3), where the left motor
has more gain than the right. This problem can be
easily solved by considering a straight-line trajectory
from the actual point of the robot to the final desired
point. Thus, the trajectory should be included into
the LMPC cost function. The Figure 11 shows a
simulated result of LMPC for WMR obtained by
using firstly the orientation error as cost function
and then the local trajectory distance and the final
desired point for the optimization. The prediction
horizons between 0.5s and 1s were proposed and the
computation time for each LMPC step was set to
less than 100ms, running in an embedded PC of
700MHz. In the present research, the available
horizon is provided by using the information of local
visual data. Thus, the desired local points as well as
the optimal local trajectory are computed using
machine vision information.
Figure 11: LMPC simulated results with a 45º trajectory.
5 CONCLUSIONS
This paper has integrated the control science and the
robot vision knowledge into a computer science
environment. Hence, global path planning by using
PREDICTIVE CONTROL BY LOCAL VISUAL DATA - Mobile Robot Model Predictive Control Strategies Using Local
Visual Information and Odometer Data
265

local information is reported. One of the important
aspects of the paper has been the simplicity, as well
as the easy and direct applicability of the
approaches. The proposed methodology has been
attained by using the on-robot local visual
information, acquired by a camera, and the
techniques of LMPC. The use of sensor fusion,
specially the odometer system information, is of a
great importance. The odometer system uses are not
just constrained to the control of the velocity of each
wheel. Thus, the absolute robot coordinates have
been used for planning a trajectory to the desired
global or local objectives. The local trajectory
planning has been done using the relative robot
coordinates, corresponding to the instant when the
frame was acquired. The available local visual data
provides a local map, where the feasible local
minimal goal is selected, considering obstacle
avoidance politics.
Nowadays, the research is focused to implement the
presented methods through developing flexible
software tools that should allow to test the vision
methods and to create locally readable virtual
obstacle maps. The use of virtual visual information
can be useful for testing the robot under synthetic
environments and simulating different camera
configurations. The MPC studies analyzing the
models derived from experiments as well as the
relative performance with respect to other control
laws should also be developed.
ACKNOWLEDGEMENTS
This work has been partially funded the Commission
of Science and Technology of Spain (CICYT)
through the coordinated research projects DPI-2005-
08668-C03, CTM-2004-04205-MAR and by the
government of Catalonia through SGR00296.
REFERENCES
Boyd, S., Vandenberghe, L., 2004. Convex Optimization,
Cambridge University Press.
Campbell, J., Sukthankar, R., Nourbakhsh, I., 2004.
Techniques for Evaluating Optical Flow in Extreme
Terrain, IROS.
Coué, C., Pradalier, C., Laugier, C., Fraichard, T.,
Bessière, P., 2006. Bayesian Occupancy Filtering for
Multitarget Tracking: An Automotive Application,
International Journal of Robotics Research.
Dennis, J.E., Shnabel, R.S., 1996. Numerical Methods for
Unconstrained Optimization and Nonlinear Equations,
Society for Industrial and Applied Mathematics.
DeSouza, G.N., Kak, A.C., 2002. Vision for Mobile Robot
Navigation: a survey, PAMI, 24, 237-267.
Elfes, A., 1989. Using occupancy grids for mobile robot
perception and navigation, IEEE Computer, 22, 46-
57.
Fox, D., Burgard, W., and Thun, S., 1997. The dynamic
window approach to collision avoidance, IEEE Robot.
Autom. Mag. 4, 23-33.
Gupta, G.S., Messom, C.H., Demidenko, S., 2005. Real-
time identification and predictive control of fast
mobile robots using global vision sensor, IEEE Trans.
On Instr. and Measurement, 54, 1.
Horn, B. K. P., 1998. Robot Vision, Ed. McGraw –Hill.
Küne, F., Lages, W., Da Silva, J., 2005. Point stabilization
of mobile robots with nonlinear model predictive
control, Proc. IEEE Int. Conf. On Mech. and Aut.,
1163-1168.
Lju, L., 1989. System Identification: Theory for the User,
ed., Prentice Hall.
Maciejowski, J.M., 2002. Predictive Control with
Constraints, Ed. Prentice Hall.
Nesterov, Y., Nemirovskii, A., 1994. Interior_Point
Polynomial Methods in Convex Programming, SIAM
Publications.
Norton, J. P., 1986. An Introduction to Identification, ed.,
Academic Press, New York.
Nourbakhsh, I. R., Andre, D., Tomasi, C., Genesereth, M.
R., 1997. Mobile Robot Obstacle Avoidance Via Depth
From Focus, Robotics and Aut. Systems, 22, 151-58.
Ögren, P., Leonard, N., 2005. A convergent dynamic
window approach to obstacle avoidance, IEEE T
Robotics, 21, 2.
Ortega, J. M., Rheinboldt, W.C., 2000. Iterative Solution
of Nonlinear Equations in Several Variables, Society
for Industrial and Applied Mathematics.
Rimon, E., and Koditschek, D., 1992. Exact robot
navigation using artificial potential functions, IEEE
Trans. Robot Autom., 8, 5, 501-518.
Schilling, R.J., 1990. Fundamental of Robotics, Prentice-
Hall.
Thrun, S., 2002. Robotic mapping: a survey, Exploring
Artificial Intelligence in the New Millennium, Morgan
Kaufmann, San Mateo, CA.
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
266
