
EXTRACTING TERRAIN MORPHOLOGY
A New Algorithm and a Comparative Evaluation
Paola Magillo, Emanuele Danovaro, Leila De Floriani, Laura Papaleo and Maria Vitali
Department of Information and Computer Science, University of Genova, Via Dodecaneso, 35, 16146 Genova, Italy
Keywords:
Terrain models, Triangulated Irregular Networks, morphological structure.
Abstract:
We consider the problem of extracting morphology of a terrain represented as a Triangulated Irregular Network
(TIN). We propose a new algorithm and compare it with representative algorithms of the main approaches
existing in the literature to this problem.
1 INTRODUCTION
Extracting and representing morphological informa-
tion is a very relevant issue in order to develop auto-
matic tools for gaining and maintaining knowledge of
terrain models which are widely used in GIS applica-
tions, Virtual Reality and so on.
A terrain model is a scalar field, i.e., a function
f (x,y) (usually called height function) defined on a
domain D. Often, f is known only at a finite set of
sampled points and it is approximated through a dis-
crete digital model: a Regular Square Grid (RSG) if
the sampled points are regularly spaced, and a Tri-
angulated Irregular Network (TIN) if they are irreg-
ularly sampled. Both RSGs and TINs provide accu-
rate representations terrains, but they fail in capturing
the morphological structure defined by critical points
(pits, peaks, passes), and integral lines, like (ridges,
valleys). On the contrary, a morphological terrain de-
scription is compact and supports a knowledge-based
approach to analyze, visualize and understand a ter-
rain dataset, as required, for instance, in visual data
mining applications.
In the last decades, there has been a lot of research
focusing on extracting critical features (points, lines
or regions) from images or terrain data described by
an RSG, or a TIN. More recent works in computa-
tional geometry concentrate on representing the mor-
phology of terrains through a decomposition of the
terrain surface into regions bounded by critical points
(minima, maxima, saddle points) and integral lines.
These techniques are rooted in Morse theory and try
to simulate the decomposition of a terrain induced by
C
2
Morse functions in the discrete case.
In this paper, we propose a new algorithm for ex-
tracting morphological information (in the form of the
stable and unstable Morse complexes) from a terrain
model described by a TIN, which is simple, requires
no floating point calculations, and can manage special
configurations such as flat triangles and edges. We
also present a comprehensive study of analogous ex-
isting methods and propose a set of experiments in
order to evaluate our approach.
Recall that a TIN basically consists of a triangula-
tion Σ covering the field domain D of the height func-
tion f , having its vertices at the sampled points. In
a triangulation, two nearby triangles can only touch
each other by sharing a vertex, or a common edge.
On each triangle t in Σ, function f is approximated as
a linear interpolant of the height values sampled at the
three vertices of t
1
.
In the remainder of this paper, Section 2 intro-
duces some basic background notions; Section 3 dis-
cusses related works; Section 4 presents our novel al-
gorithm; Section 5 introduces three representative al-
gorithms that we have implemented for comparison,
and Section 6 presents an experimental evaluation of
our novel algorithm compared to these three methods.
Finally, Section 7 draws some concluding remarks.
1
Note that RSGs can be reduced to TINs by triangulat-
ing each square into two triangles.
13
Magillo P., Danovaro E., De Floriani L., Papaleo L. and Vitali M. (2007).
EXTRACTING TERRAIN MORPHOLOGY - A New Algorithm and a Comparative Evaluation.
In Proceedings of the Second International Conference on Computer Graphics Theory and Applications - GM/R, pages 13-20
DOI: 10.5220/0002076200130020
Copyright
c
SciTePress

2 BACKGROUND
Morse theory is a powerful tool to capture the topo-
logical structure of a scalar field in the continuum
(Smale 1960). Let f be a C
2
real-valued function de-
fined over a domain D ⊆ R
2
. A point p ∈ R
2
is called
a critical point of f if and only if the gradient of f
vanishes at p. The function f is a Morse function
if and only if the Hessian matrix H
p
f of the second
derivatives of f at a critical point p is non-singular
(its determinant is 6= 0): basically, if all its critical
points are non-degenerate. This implies that the criti-
cal points of a Morse function are isolated. The num-
ber of negative eigenvalues of H
p
f is called the index
of a critical point p. In 2D, a non-degenerate critical
point p of a Morse function f can be of three types:
a minimum (pit), a saddle, or a maximum (peak), if p
has index 0, 1 or 2, respectively. An integral line of
a function f is a maximal path which is everywhere
tangent to the gradient vector field. It is emanating
from a critical point or from the boundary of D, and
it reaches another critical point or the boundary of D.
An integral line which connects a maximum to a sad-
dle, or a minimum to a saddle, is called a separatrix
line
2
.
Integral lines that converge to a maximum, a sad-
dle and a minimum form a 2-dimensional (region),
1-dimensional (line) and 0-dimensional (point) cell,
respectively, and they are called unstable manifolds.
Integral lines that originate from a minimum, a sad-
dle and a maximum form a 2-, 1- and 0-dimensional
cell, respectively, and they are called stable mani-
folds. The stable (unstable) manifolds are pair-wise
disjoint cells and form a complex, since the boundary
of every cell is the union of lower-dimensional cells.
They are called stable and unstable Morse complexes,
respectively. Figure 1(a) shows a decomposition of
the domain of a scalar field into a stable Morse com-
plex.
A Morse function f is a Morse-Smale function
when the stable and the unstable manifolds intersect
only transversally. In two dimensions, this means that
the stable and unstable 1-manifolds (lines) cross when
they intersect, and the crossing points are saddles.
A Morse-Smale complex is the complex defined
by the intersection of the stable and unstable Morse
complexes for a function f which is a Morse-Smale
function. The 1-skeleton of a Morse-Smale complex
consists of the critical points and the separatrix lines
joining them, and it is called a critical net (see Figure
2
In Geographic Information Systems (GISs), separa-
trix lines that connect minima to saddles are usually called
ravine, or valley lines, while those that connect saddles to
maxima are called ridge lines.
(a)
(b)
Maximum
Minimum
Saddle
Figure 1: (a) An example of a stable Morse complex (the 2-
manifolds correspond to the minima). (b) The Morse-Smale
complex. Its 1-skeleton is the critical net.
Figure 2: Edge labelled T-D is steeper than edge labelled
S-D. Numbers denote vertex heights.
1 (b)).
The surface network (Pfaltz 1976; Schneider and
Wood 2004) used in Geographic Information Systems
(GISs) for morphological terrain modeling, is essen-
tially the critical net.
3 RELATED WORK
Several algorithms have been proposed in the litera-
ture for decomposing the domain of a scalar field f
(as a terrain model) into an approximation of a Morse
complex (or of a Morse-Smale complex). They either
fit a C
1
or C
2
surface on a terrain model, or simulate a
Morse-Smale complex (a Morse complex) in the dis-
crete case. By assuming that no two adjacent vertices
in the TIN have the same height, they ensure that the
critical points are isolated, as in the Case of C
2
Morse
functions (Edelsbrunner et al. 2001).
A Morse (Morse-Smale) complex can also be de-
fined using the concepts related to watershed tranform
(Meyer 1994; Vincent and Soille 1991; Roerdink and
Meijster 2000; Mangan and Whitaker 1999; Stoev
and Strasser 2000). The watershed transform in the
C
2
case provides a decomposition of a the domain of
a function f into open regions of influence associated
to the minima, called catchment basins. Catchment
basins can be described in terms of topographic dis-
tance (Meyer 1994). In the 2D case, if the function f
is a Morse function, the catchment basins of the min-
ima are essentially 2-manifolds of the stable Morse
complex. Through a change in the sign of the Morse
function f , the 2-manifolds (associated to the max-
ima) of the unstable Morse complex can be extracted.
In order to build a structural representation of a
GRAPP 2007 - International Conference on Computer Graphics Theory and Applications
14

given scalar field f , all the existing methods extract
critical points of f as a first step of the global proce-
dure. The most common approach to compute criti-
cal points examines, for each vertex p in the TIN, the
neighbors points (sharing with p and edge) and com-
putes the height difference between every point and
p. If all differences are positive (p is lower than its
neighbors), then p is a minumum. If all differences
are negative (p is higher than its neighbors), then p
is a maximum. If the number of sign changes of such
difference, while traversing p’s neighbors in ciclic or-
der, is two, then p is a regular, i.e., non-critical point.
If the number of sign changes is four, then p is a sad-
dle; if it is more than four, then p is a multiple saddle.
This technique is used by almost all the algorithms,
with the exception of (Bajaj and Shikore 1998).
Existing algorithms for extracting an approxima-
tion of a Morse (Morse-Smale) complex can be clas-
sified according to: the input they consider (namely
RSG or TIN), the output they produce (namely an ap-
proximation of a Morse-Smale complex or of a Morse
complex) and the algorithmic technique they choose.
Here, we have classified them into boundary-based or
region-based techniques (Comic et al. 2005).
Boundary-based techniques basically extract an
approximation of the critical net, by computing the
critical points and then tracing the integral lines, start-
ing from saddle points (Bajaj et al. 1998; Schnei-
der 2005; Takahashi et al. 1995; Edelsbrunner et
al. 2001; Bajaj and Shikore 1998; Bremer et al.
2003; Pascucci 2004). Region-based techniques ex-
tract a discrete approximation of the stable and unsta-
ble Morse complexes, by starting from minima and
maxima and letting a region grow until a given con-
dition is reached (Danovaro et al. 2003a; Danovaro
et al. 2003b; Meyer 1994; Vincent and Soille 1991;
Mangan and Whitaker 1999). We included watershed
algorithms in the latter class since they are region-
based in nature.
In Section 5 we present our implementations of
some representative algorithms of the above tech-
niques. All algorithms, with the exception of the
watershed approach, require that the three vertices
of a triangle have distinct heights. This is gener-
ally achieved, when necessary, by perturbation of the
height values.
4 THE STD ALGORITHM
In this section we present our novel algorithm, that
we called STD, for extracting the 2-manifolds (asso-
ciated with the minima) of a stable Morse complex for
a (Morse) function f defined on a TIN. The algorithm
is region-based in nature since it starts from the min-
ima and lets the 2-manifolds of the Morse complex
grow as long as it is possible.
We first describe the algorithm under the assump-
tion that no two vertices of the terrain have the same
height. Successively, we relax this assumption and
show how to deal with flat triangles, and triangles
having one flat edge.
4.1 Basic Version of the Algorithm
The STD algorithm performs three main steps:
1. Classify the vertices of each triangle t in the TIN,
based on their heights.
2. Extract the minima of the function in the TIN.
3. For each minimum p, construct the stable 2-
manifold by iteratively adding triangles to it.
Vertex classification and Extraction of local min-
ima. For each triangle t in the TIN, the highest,
middle, and lowest vertex are labeled as Source (S),
Through (T), and Drain (D), respectively.
By this STD configuration of the vertices we ba-
sically simulate the gradient direction of t in the dis-
crete case. Note that this labelling does not assume
any kind of interpolation (linear or higher-order) on
triangles or edges of the mesh. Edge labelled S-D is
not necessarily the edge of steepest descent. In Figure
2 the steepest descent is at edge labelled T-D.
The local minima identification is very simple:
they are found as those vertices labeled D in all their
incident triangles.
Construction of the stable 2-manifolds. For each
minimum p, the stable 2-manifold γ
p
associated with
p is initialized with all triangles of the TIN which are
incident in p. Successively, an iterative phase starts
in which, at each step, the algorithm decides if a tri-
angle t, externally adjacent to one edge e of the cur-
rent perimeter of γ
p
, can be added to γ
p
. The ratio-
nale for this decision takes the following issues into
account: (i) the choice must reflect the intuition that
water flows from a higher to a lower height, (ii) the
choice must be deterministic, i.e., a triangle t cannot
be included into different 2-manifolds, depending on
the order in which minima are processed.
The algorithm maintains the invariant that, if a tri-
angle t has been included into γ
p
, then the edge of t
labelled T-D is not on the boundary of γ
p
.
4.2 Inclusion of a Triangle
Let e be an edge of the current perimeter of γ
p
, and
t be the triangle externally adjacent to e. The deci-
sion whether to include t into γ
p
or not, is based on
EXTRACTING TERRAIN MORPHOLOGY - A New Algorithm and a Comparative Evaluation
15

(a) (b)
Figure 3: Case 1 (a) and Case 2 (b). Arrows denote water
flow. Green triangles are included.
the STD configuration of its vertices. There are three
possible cases.
Case 1. If the vertex v of t opposite to e is labelled D
in t, then we do not include t into γ
p
. See Figure 3 (a).
This is according to the intuition that water cannot
exit t through e, since it naturally flows towards v.
Triangle t will be included when we will reach it from
another edge, and Case 2 or 3 will hold.
Case 2. If the vertex v of t opposite to e is labelled
S in t, then we include t into γ
p
. See Figure 3 (b). In-
tuitively, water tends to flow across t and reach vertex
v
0
, endpoint of e, which is labelled D in t. The ques-
tion is whether it will exit t through e (in that case
t belongs to γ
p
) or through the edge of t labelled S-
D. Now, we explain why we have decided that water
passes through edge e.
Let t
0
be the triangle belonging to γ
p
and adjacent
to t along e, and let v
0
be the vertex of t
0
opposite to e.
Note that, for the invariant, e cannot be labelled T-D
in t
0
(equivalently, v
0
cannot be labelled S).
If e is labelled S-T in t
0
, then water enters t
0
through e, therefore it must exit from t through e.
If e is labelled S-D in t
0
, then water exits t
0
through its edge e
0
labelled T-D (it cannot exit
through the other edge, since it is labelled S-T, and
it must exit from one edge different from e otherwise
t
0
would not have been included in γ
p
). Therefore wa-
ter that flows across t and reaches vertex v (which is
labelled D in both t and t
0
) turns around v
0
, enters t
0
,
and finally exits t
0
through e
0
.
Note that the invariant is maintained: edge e (la-
belled T-D in the newly included triangle t) is inside
the updated 2-manifold γ
p
.
Case 3. If the vertex v of t opposite to e is labelled
T in t, then the situation is more complex. Certainly,
water flows to vertex v
0
, endpoint of e, which is la-
belled D in t. Then, will it exit from t into γ
p
through
edge e, or will it exit t through its edge e
0
labelled T-D,
towards the 2-manifold existing on the other side?
Starting from t, we explore the maximal fan of tri-
angles having their lowest vertex in v
0
(i.e., v
0
is la-
belled D in all such triangles). Let w be the vertex
(a) (b) (c)
Figure 4: (a) Case 3 with non-empty set of included trian-
gles; green triangles are included. (b) Case 3 with empty
the set of included triangles. (c) Inclusion of the remaining
triangles of the fan by applying Case 2 from edge e
1
.
of maximum height among the vertices of such trian-
gles. The part of the fan starting from t and going up
to edge v
0
w is included into γ
p
. See Figure 4 (a). The
other part of the fan will be later included into the 2-
manifold existing on the other side. Note that, if w is
the same as the vertex labelled S in t, then no triangle
is included. See Figure 4 (b).
The invariant is maintained since the edges re-
maining on the boundary of the updated 2-manifold
γ
p
are v
0
w, and edges opposite to v
0
: none of them is
labelled T-D. In fact, edges opposite to v
0
are labelled
S-T in the just included triangles, and edge v
0
w is la-
belled S-D in both adjacent triangles.
Note that the management of Case 3 does not in-
terfere with Case 2. In fact, the edge e
1
marking the
other side of the fan may be labelled T-D in its ad-
jacent triangle t
1
belonging to the fan. In this case,
when reached from e
1
, t
1
will be included into the 2-
manifold γ
q
existing on the other side of e
1
. The trian-
gle adjacent to t
1
along the other edge of t
1
incident in
v
0
may be in the same situation (and thus be included
in γ
q
as well), and so on. Thus, a whole fan of tri-
angles, starting from t
1
, is included into γ
q
. But this
fan must end at edge w, because the opposite vertex
to v
0
w is labelled T in the next triangle. Thus, there is
no interference between Case 3 applied from edge e,
and Case 2 repeatedly applied starting from edge e
1
.
See Figure 4 (c).
4.3 Time Complexity
It can be easily shown that every triangle t of the TIN
is examined at most three times, one from each edge,
before being included into some 2-manifold. Thus,
the worst-case time complexity of our algorithm is
O(n) where n is the number of TIN vertices. The
only non-trivial part in this statement is showing that,
in Case 3, a triangle can be in a traversed fan, with-
out being included, at most once during the whole al-
gorithm. The triangles of the fan, which are not in-
cluded, are those located beyond edge v
0
w. The same
fan may be traversed from the opposite side, while
GRAPP 2007 - International Conference on Computer Graphics Theory and Applications
16

growing another 2-manifold γ
q
. Since we will be tra-
versing the same fan in the opposite way, in that situ-
ation exactly those triangles, that were not previously
included, will be found before edge v
0
w, and will be
included into γ
q
.
4.4 Management of Special Cases
Now, we explain how the STD algorithm deals with
flat triangles, and triangles with a flat edge.
In a preprocessing step, we find edge-connected
areas of flat triangles, and vertex-connected networks
of flat edges that are not edge- or vertex-incident into
a flat triangle. Such areas / networks are candidate to
act as 1- or 2-dimensional local minima. Let h be the
height of a flat area or network. Let h
0
be the min-
imum height of the third vertices of triangles exter-
nally adjacent to the perimeter of the flat area, or in-
cident into edges of the network. If h
0
> h then the
flat area / network is treated as a local minimum: its
2-manifold is initialized with all the triangles of the
flat area, or with all triangles incident in the flat net-
work, and it is expanded in the same way as other
2-manifolds.
A flat area that is not a local minimum (i.e., h
0
< h)
is assigned to the 2-manifold containing the triangle
t
0
, externally adjacent to the flat area, whose third ver-
tex has height h
0
. If t
0
is not unique, then we choose
the 2-manifold corresponding to the lowest local min-
imum (if unique), or arbitrarily (otherwise).
During the algorithm, triangles with a flat edge
may be examined to test whether they can be included
into a growing 2-manifold. For such purpose, Cases
1,2, and 3 introduce some exceptions when triangle t
has a flat edge.
An exception may arise in Case 1, when the oppo-
site vertex v, labelled D, is endpoint of the flat edge
of t. In this case, we consider triangle t
0
which is ad-
jacent to t along its flat edge. If edge e
0
is higher than
the third vertex of t
0
, we do not include t (no excep-
tion). If edge e
0
is lower than the third vertex of t
0
,
then this is an exception: we construct the fan of tri-
angles incident into the vertex of t which is labelled
D, and proceed in the same way as in Case 3.
Another exception arises in Case 2, when the op-
posite vertex v, labelled S, is endpoint of the flat edge
of t. In this case, the two non-flat edges of t, e and
e
0
, are in the same situation. We must decide whether
to include t into γ
p
from e, or to include t into the 2-
manifold that will reach t from edge e
0
. We construct
the fan of triangles incident into the vertex of t which
is labelled D, and proceed as in Case 3.
In Case 3, the constructed fan cannot include flat
triangles, and cannot include triangles with a flat
edge, when the flat edge belongs to a local minimum
network. If we find one of these cases, then we stop
extending the fan.
Case 3 takes the edge v
0
w, connecting the cen-
ter v
0
of the fan with its upper point w, as the edge
where to split the fan and assign its triangles to the 2-
manifolds existing on the two sides of the fan. Now,
vertex w of maximum height may not be unique. Let
w
1
, w
2
, ... w
M
(M > 1) be the vertices having the max-
imum height, sorted in counterclockwise order along
the fan. We split the fan at edge v
0
w
i
where i is the
integer result of division M/2.
5 REPRESENTATIVE
MORPHOLOGY ALGORITHMS
We have implemented a number of algorithms that we
have chosen as representative of the approaches exist-
ing in the literature (Section 3).
5.1 A Boundary-based Algorithm
Our implementation of a boundary-based approach,
inspired by (Edelsbrunner et al. 2001; Takahashi et
al. 1995), extracts the Morse-Smale complex from a
TIN by computing the critical net, in two basic steps:
1. Extract the critical points and unfold multiple
saddles.
2. Compute the 1-cells of the complex by starting
from the saddle points, and tracing two paths of
steepest descent and two paths of steepest ascent,
which stop at minima and maxima, respectively.
Starting from each (simple) saddle p, the algo-
rithm computes the four lines belonging to the crit-
ical net which are incident in p. At each step, the
path is extended by adding the edge corresponding to
the maximum positive [negative] slope, until a maxi-
mum [minimum] is found. In the implementation we
present in this paper we refer only to the stable Morse
complex: for each saddle we trace two lines which
follow the maximum positive slope and stop when
two maxima are found.
5.2 A Region-based Algorithm
We have presented in (Danovaro et al. 2003a) an al-
gorithm for computing both the stable and unstable
Morse complexes for a TIN. The algorithm can be
sketched into two main steps:
1. Extract minima and maxima.
EXTRACTING TERRAIN MORPHOLOGY - A New Algorithm and a Comparative Evaluation
17

2. Compute the stable (unstable) Morse complex by
applying a region-growing procedure. This proce-
dure adds triangles to a 2-manifold iteratively.
For extracting the stable Morse complex, the algo-
rithm computes the gradient for each triangle t in M,
and the angles between the gradient and the normal
vector at each edge of t (pointing outwards from the
triangle). The edges of t corresponding to the largest
and to the smallest angle are marked as exit and en-
trance, respectively.
A 2-manifold γ
p
of the stable complex is initial-
ized with the triangles incident in a local minimum p.
At a generic step, γ
p
is extended by adding a new tri-
angle t sharing an edge e with γ
p
, provided that e is an
entrance for t and an exit for the triangle t
0
in γ
p
shar-
ing edge e with t. The unstable complex is computed
in a completely symmetric way.
5.3 A Watershed Algorithm
We have implemented the watershed algorithm based
on simulated immersion (Vincent and Soille 1991).
Our implementation is applicable to TINs with flat
edges and/or flat triangles and it consists of mainly
three macro-steps:
1. Sort the vertices in increasing order with respect
to the height value.
2. Perform the flooding step level by level, starting
from the minima: this labels every vertex as be-
longing to a 2-manifold associated to a minimum.
3. Assign triangles to basins based on the labels of
their vertices.
The flooding step assigns a distinct label to each
minimum m and to the vertices of its associated 2-
manifold γ
m
. Those vertices, where two 2-manifolds
meet are instead labeled as watershed vertices. At
each iteration, a height value h (initially, the mini-
mum height) is considered. All vertices with the same
height h are first given a neutral label. Then those ver-
tices whose neighbors have been labeled during the
previous iteration are processed in order to assign the
label of a 2-manifold γ
m
to them.
To assign the label to a vertex p, we examine
the neighbor vertices of p. If they all belong to the
same 2-manifold γ
m
or are watershed points, then p
is marked as belonging to γ
m
. If they belong to two
or more different 2-manifolds, then p is marked as a
watershed point. The same operations is recursively
repeated on the neighbors points of the just labeled
vertices which have a neutral label (i.e., height = h).
Vertices at height h that are not connected to any
previously processed vertex still have the neutral la-
EGGS (6561 vertices) MARCY (1000 vertices)
Figure 5: Two of the test TINs.
bel. Such vertices belong to a set of new minima at
level h, and get a new label.
Finally, we label each triangle t. If all the vertices
of t, that are not watershed points, belong to the same
2-manifold γ
m
, then we assign the triangle to γ
m
. If
two vertices belong to different 2-manifolds, then t is
assigned to the 2-manifold related to the vertex with
the lowest height.
6 EXPERIMENTS
The goal of this section is to measure the quality of the
results of the STD algorithm proposed in this paper,
as well as evaluating the degree of uncertainty in mor-
phology computation, i.e., to which extent the current
algorithms are able to provide consistent results. We
perform different experimental comparisons on both
real and synthetic datasets by using our STD algo-
rithm, the boundary-based (BND), the region-based
(REG), and the watershed (WTS) algorithm described
in Section 5.
Algorithm STD is of course very different from
BND; STD and WTS have in common the idea of
growing 2-manifolds from local minima; REG is sim-
ilar in approach, but (i) uses the gradient, and (ii) it
builds a 2-manifold in pieces which are then glued to-
gether, while STD builds every 2-manifold directly,
thanks to the mechanism of fans (Case 3).
We show results using two different terrains: (i)
EGGS, a synthetic terrain built by sampling a func-
tion which is a combination of two planes and 64
gaussian surfaces, and (ii) MARCY representing part
of a real terrain model provided with the US Geolog-
ical Survey in which heights have been perturbed in
order to remove flat edges.
We have three TINs for EGGS, corresponding
to different sampling resolutions (6,561, 25,921, and
103,041 vertices), and three TINs for MARCY, corre-
sponding to approximations of the terrain at different
resolutions (1,000, 5,000 and 10,000 vertices). See
GRAPP 2007 - International Conference on Computer Graphics Theory and Applications
18
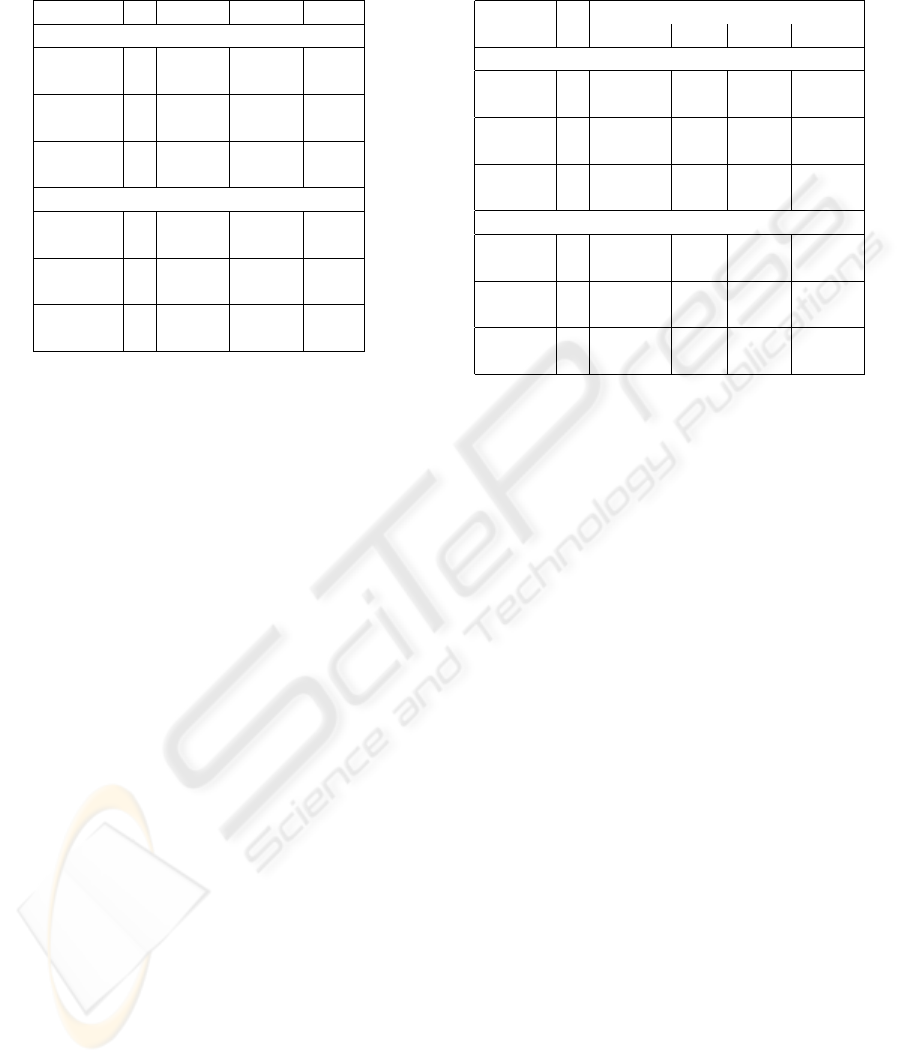
Table 1: Triangles (t) and percentage of terrain area (a) as-
signed to a different 2-manifold in the new STD algorithm
and in one of the other three methods.
# triang. BND REG WTS
EGGS
12,800 t 398 669 71
a 3.11 5.23 0.55
51,200 t 1934 2,721 62
a 3.78 5.31 0.12
204,800 t 14,828 14,488 112
a 7.24 7.07 0.55
MARCY
1,910 t 107 98 39
a 3.89 2.95 1.64
9,788 t 554 690 151
a 4.73 6.10 1.31
19,602 t 1,802 2,066 356
a 9.20 10.54 1.82
Figure 5. Some images of the computed stable Morse
complexes are in Figures 7 and 6.
Table 1 evaluates the difference in the results be-
tween our new STD algorithm and the other three.
This also provides a measure of the uncertainty of re-
sults. In general, the STD algorithm tends to be closer
to the watershed method.
Table 2 reports the quantity of TIN surface whose
classification results uncertain (i.e., assigned to the 2-
manifold of different minima in different algorithms).
The various algorithms may disagree in their results
up to an extent between 0.5% and 10.5% of the total
TIN surface.
It may be surprising that algorithms differ so much
in their results: up to 9% of the terrain area may be as-
signed to four different minima by the four considered
approaches. It is also difficult to judge which one is
more correct, because a ground thruth is only avail-
able for C
2
functions, and not for TINs. Indeed, all
existing methods only approximate Morse (or Morse-
Smale) theory in the discrete case, through simplifi-
cations, conventions, and heuristics.
7 CONCLUDING REMARKS
We have proposed a new algorithm for computing
the stable (unstable) Morse complex for a TIN ter-
rain model. We performed experiments on both real
and synthetic datasets in order to demonstrate the be-
havior of the STD algorithm with respect to other al-
gorithms, as well as the intrinsic uncertainty of stable
manifolds computation at this stage of research. We
showed that our STD algorithm behaves quite well
Table 2: Triangles (t) and percentage of terrain area (a) as-
signed to a unique 2-manifold, or to 2, 3 and 4 different
2-manifolds, by the four algorithms.
# # of different 2-manifolds
triang. 1 2 3 4
EGGS
12,800 t 11,963 42 397 398
a 93.46 0.33 3.10 3.11
51,200 t 48,221 42 1,003 1,934
a 94.18 0.08 1.96 3.78
204,800 t 184,608 48 5,316 14,828
a 90.14 0.02 2.60 7.24
MARCY
1,910 t 1,744 13 46 107
a 94.18 0.64 1.31 3.87
9,788 t 8,835 56 343 554
a 90.26 0.57 3.50 5.66
19,602 t 17,114 149 537 1,802
a 87.31 0.76 2.74 9.19
for all the test datasets and that it provides intuitively
good results. Moreover, our algorithm is very sim-
ple, and requires no floating-point calculations since
it uses only numerical comparisons.
Morphology algorithms that can be extended to
higher dimensions have a special interest from the sci-
entific community. Our STD algorithm is as simple as
the boundary-based approach and, unlike it, seem to
be more easily extensible to higher dimensions. For
instance, in 3D we label the four vertices of each tetra-
hedron and have four cases to be managed.
Finally, (Danovaro et al. 2003a) present a
morphology-based multi-resolution terrain model, to
encode different levels of approximation of a Morse-
Smale complex. We plan to use the STD algorithm in
this context.
ACKNOWLEDGEMENTS
This work has been partially supported by the Eu-
ropean Network of Excellence AIM@SHAPE (con-
tract n. 506766), by the National Science Foundation
(grant CCF-0541032), by the MIUR-FIRB project
SHALOM (contract n. RBIN04HWR8) and by the
MIUR-PRIN project on “Multi-resolution modeling
of scalar fields and digital shapes”.
EXTRACTING TERRAIN MORPHOLOGY - A New Algorithm and a Comparative Evaluation
19

STD BND REG WTS
Figure 6: The boundary of the stable Morse complex computed by the four algorithms on the EGGS. terrain (6561 vertices).
STD BND REG WTS
Figure 7: The boundary of the stable Morse complex computed by the four algorithms on the MARCY. terrain (1000 vertices).
REFERENCES
C. L. Bajaj, V. Pascucci, and D. R. Shikore. Visualization
of scalar topology for structural enhancement. In Pro-
ceedings IEEE Visualization’98, pages 51–58. IEEE
Computer Society, 1998.
C. L. Bajaj and D. R. Shikore. Topology preserving data
simplification with error bounds. Computers and
Graphics, 22(1):3–12, 1998.
P.-T. Bremer, H. Edelsbrunner, B. Hamann, and V. Pascucci.
A multi-resolution data structure for two-dimensional
Morse functions. In Proceedings IEEE Visualization
2003, pages 139–146. IEEE Computer Society, 2003.
L. Comic, L. De Floriani, and L. Papaleo. Morse-Smale de-
composition for modeling terrain knowledge. In Spa-
tial Information Theory: International Conference,
volume 3693 of Lecture Notes in Computer Science,
pages 426–444, 2005.
E. Danovaro, L. De Floriani, P. Magillo, M. M. Mesmoudi,
and E. Puppo. Morphology-driven simplification and
multi-resolution modeling of terrains. In Proceed-
ings ACM-GIS 2003 - The 11th International Sym-
posium on Advances in Geographic Information Sys-
tems, pages 63–70. ACM Press, 2003.
E. Danovaro, L. De Floriani, and M. M. Mesmoudi. Topo-
logical analysis and characterization of discrete scalar
fields. In Theoretical Foundations of Computer Vision,
Geometry, Morphology, and Computational Imaging,
volume 2616 of Lecture Notes on Computer Science,
pages 386–402. Springer Verlag, 2003.
H. Edelsbrunner, J. Harer, and A. Zomorodian. Hierarchical
Morse complexes for piecewise linear 2-manifolds. In
Proceedings 17th ACM Symposium on Computational
Geometry, pages 70–79. ACM Press, 2001.
A. Mangan and R. Whitaker. Partitioning 3D surface
meshes using watershed segmentation. IEEE Trans-
action on Visualization and Computer Graphics,
5(4):308–321, 1999.
F. Meyer. Topographic distance and watershed lines. Signal
Processing, 38:113–125, 1994.
V. Pascucci. Topology diagrams of scalar fields in scien-
tific visualization. In Topological Data Structures for
Surfaces, pages 121–129. John Wiley and Sons Ltd,
2004.
J. L. Pfaltz. Surface networks. Geographical Analysis,
8:77–93, 1976.
J. Roerdink and A. Meijster. The watershed transform:
definitions, algorithms, and parallelization strategies.
Fundamenta Informaticae, 41:187–228, 2000.
B. Schneider. Extraction of hierarchical surface networks
from bilinear surface patches. Geographical Analysis,
37:244–263, 2005.
B. Schneider and J. Wood. Construction of metric surface
networks from raster-based DEMs. In Topological
Data Structures for Surfaces, pages 53–70. John Wi-
ley and Sons Ltd, 2004.
S. Smale, Morse Inequalities for a Dynamical System, Bul-
letin of American Mathematical Society, 66: 43–49,
1960.
S. L. Stoev and W. Strasser. Extracting regions of interest
applying a local watershed transformation. In Pro-
ceedings IEEE Visualization’00, pages 21–28. IEEE
Computer Society, 2000.
S. Takahashi, T. Ikeda, T. L. Kunii, and M. Ueda. Al-
gorithms for extracting correct critical points and
constructing topological graphs from discrete geo-
graphic elevation data. Computer Graphics Forum,
14(3):181–192, 1995.
L. Vincent and P. Soille. Watershed in digital spaces: an
efficient algorithm based on immersion simulation.
IEEE Transactions on Pattern Analysis and Machine
Intelligence, 13(6):583–598, 1991.
GRAPP 2007 - International Conference on Computer Graphics Theory and Applications
20
