
LINUX MOBILE
A Platform for Advanced Future Mobile Services
Frode Sivertsen
Dept. of Telematics, Norwegian University of Science and Technology
O.S. Bragstads Plass 2E, N-7491 Trondheim, Norway
Ivar Jørstad
Ubisafe, Bjølsengata 15, N-0468 Oslo, Norway
Do van Thanh
Telenor R&D, Snarøyveien 30, N-1331 Fornebu, Norway
Keywords: Linux Mobile, Embedded Systems, Soft Real-Time kernel, Application Development Platforms.
Abstract: Linux has for some time been the operating system of choice for many types of embedded devices (e.g.
network devices like routers, as well as multimedia devices like set-top-boxes). Currently, Linux is also
gaining momentum as an operating system for mobile phones. This paper studies what it takes to make
Linux "go mobile", i.e., what adaptations are necessary to make the Linux kernel fit as a mobile operating
system, what is the architecture of such a platform, and what are the major benefits.
1 INTRODUCTION
Linux already exists in several commercial
distributions targeted for embedded platforms and
currently has about 23% of the world market share
on mobile phones, even though this number
provided by The Diffusion Group can be disputed.
(The Diffusion Group, 2006) (Blandford, 2006)
With the development of the handheld device
hardware, Linux is of particularly interest. It has
been ported to several hardware architectures for
years, it has one of the most stable kernels, and the
functionalities of the handheld devices are growing
to be more and more similar to that of a “regular”
PC. Major embedded Linux vendors such as
MontaVista, and Trolltech are serving more and
more customers with development environments
partially based on proprietary software every day.
During the first half of 2007 one of the most
anticipated releases of a Linux driven mobile phone
will be ready for shipping, the Neo1973 from First
International Computing, FIC. Linux is nothing new
as a mobile phone operating system, but this is the
first mobile phone which will be shipped with
completely open source software based on the
OpenMoko platform. (Cheap, hackable Linux
smartphone due soon, 2006) (OpenMoko: The
World’s First Integrated Open Source Mobile
Communications Platform (n.d.).)
Many in the handheld operating system
community favours Linux as the de-facto operating
system for handheld devices to be, because of its
openness, flexibility, broad developer base, and its
modularity. They predict a new value added feature
in the next generation of mobile phones where the
applications may become the ringing tones of today
(Purdy, 2007).
With the release of the 2.6 kernel of Linux, it has
gone further in providing real-time services but yet
keeping the advances features compared to regular
real-time operating systems. Linux positions itself
with the advantages from both the real-time
operating systems and the microkernel operating
systems. Compared to its major competitors, being
Symbian and Windows, it has its already mentioned
advantages, but the performance is just as good as
that of the mobile targeted operating system of
Symbian (Benchmark clocks OMAP2420 graphics
on Linux, Symbian, 2006).
246
Sivertsen F., Jørstad I. and van Thanh D. (2007).
LINUX MOBILE - A Platform for Advanced Future Mobile Services.
In Proceedings of the Second International Conference on Wireless Information Networks and Systems, pages 230-237
DOI: 10.5220/0002149302300237
Copyright
c
SciTePress

These are just some of the reasons why it is
believed that Linux actually has the potential to
become the de-facto mobile operating system of the
future phones.
2 INTRODUCING LINUX
The components that form Linux do not change
much whether they run on a server, a workstation, or
a mobile phone. The Linux kernel is what is referred
to as a monolithic kernel. Basically it consists of an
architecture-dependent low-level interface that
interacts with the hardware. However, it provides a
hardware-independent API to the higher layers (i.e
application layer and libraries) through high-level
abstractions which can have a constant code base.
The high-level abstractions are processes, files,
sockets, signals etc.
Figure 1: The architecture of a generic Linux system.
(Yaghmour, 2003).
The interpretation components such as file
systems and network protocols are used to
understand how to interact with the devices present
on the platform. Many standards have been
developed throughout the years, and because of its
many portings, Linux supports more than its
competing operating systems.
On top of the high-level abstractions one find the
libraries that acts as standardized API’s for the
application layer, since the services exported by the
kernel are often unfit to be used directly by the
applications.
(Yaghmour, 2003) This is, as already
mentioned, one of the areas where Linux has its
strength. C, C++, Perl, Java etc. are languages easily
supported by the Linux kernel through various
libraries. This can be custom fit, regulating the size
of the operating system footprint.
For the graphical user interface Linux supports
several window managers and graphical libraries.
The X Window System, X11, which usually runs on
most desktop distributions is quite large, requires 8
MB of RAM and was originally made as a
client/server application. The most used open source
window managers for handheld devices are
Nanowindows, formerly known as Microwindows,
and Matchbox. In contrast to their “big brother”
X11, they have reduced resource requirements.
Other window managers intended for embedded
devices exist as well. (Embedded Linux Graphics
Quick Reference Guide, (n.d.).)
The window managers usually use graphical
libraries such as Nano-X, Qt/Embedded, and GTK+
possibly with GTK-DFB and GTK-X, to provide the
GUI. Trolltech, the makers of Qt, have a rather
complex license model while GTK+ is completely
GPL licensed.
3 LINUX AS A SOFT REAL-TIME
OPERATING SYSTEM
Regular real-time operating systems are mainly
made for MMU-less processors with a flat address
space with no memory protection between the kernel
and its running applications. This means that the
kernel, the kernel subsystems, and the applications
share the same address space and must therefore be
made foolproof to avoid crashing the system. This
makes adding new software difficult. The system
must also be brought down to do this.
A microkernel provides a very small operating
system footprint which offers only the most basic
services such as scheduling, interrupt handling, and
message passing. The rest of the operating system,
such as file systems, device drivers, and networking
stack, runs as applications with their own private
address space. The microkernel is dependent on well
defined APIs for communication with the operating
system and robust message-passing schemes
between processes. Only that way might real-time
services and modularity be ensured.
Linux is built up by several subsystems that can
be dynamically loaded into the kernel, such as the
file systems. This, however, do not make it a
microkernel-based operating system. The kernel still
interacts with the drivers using direct system calls,
and not through message passing between processes.
Message passing between processes can be very
resource consuming and is regarded as one of the
major drawbacks of microkernel operating systems.
The dynamically loadable kernel module are pieces
of kernel code that are not directly included or
LINUX MOBILE - A Platform for Advanced Future Mobile Services
247

linked in the kernel, but can be inserted and removed
from the running kernel at almost any time.
Any new code intended for the Linux kernel
goes through a great deal of testing regarding design,
functionality, and performance before it gets
accepted into the mainline kernel releases. Hence,
this trying process has looked after the advantages of
“regular” real-time operating systems and made it
one of the most stable pieces of software. At the
same time it has kept the advantage of the memory
protection to individual kernel subsystems provided
in microkernels, but avoided the resource consuming
message passing. These are some the reasons why
Linux have become so popular (Raghavan, Lad and
Neelakandan, 2005).
3.1 User Mode and Kernel Mode
The monolithic kernel of Linux has a distinction
between kernel and user mode execution states to
secure the memory protection. A process in User
mode can not enter kernel programs or kernel data
structures directly. The User mode programs issue
system calls to enter Kernel mode. The time before a
system call is being served depend on the interrupt
signal sent from the process to the CPU and its
actions according to the interrupt (Bowet and Cesati
2001:1-34).
3.2 Re-entrancy
The Linux kernel is re-entrant, meaning that several
processes may be executing in Kernel Mode at the
same time. Only one process can progress at the
time in a uniprocessor system, but others may be
waiting for the completion of some I/O request or
the CPU. To provide re-entrancy, the functions must
only modify local variables, not global ones.
The kernel may also include non-re-entrant
functions that use locking to ensure that only one
process can execute that function at a time. These
processes may then modify global variables. If an
interrupt occurs, the kernel is able to suspend the
running process even if it is in Kernel Mode. This
ensures a higher throughput for the device
controllers that issue interrupts. While the kernel
handles the interrupt, the device controller may
perform other tasks.
The re-entrancy influences the organization of
the kernel and its kernel control path which denotes
the sequence of instructions executed by the kernel,
being an interruption, a system call or an exception.
Normally the kernel would execute these tasks one
by one, from the first to the last. However, during
handling interrupts and exceptions, the kernel can
interleave one process in Kernel Mode to run a
process required by the first one or run another
process until the first one can be continued due to
waiting on an I/O operation. Re-entrancy requires
the implementation of interprocess communication,
which will be described shortly (Bowet, D P. and
Cesati, M., 2001:1-34).
3.3 Process Address Space
Each process runs in its private address space. When
a process is running in User Mode it has its own
private stack, data, and code areas. When operating
in Kernel Mode, those are different.
Since the kernel is re-entrant, several different
processes may be executed in turn, each with its own
kernel control path. These paths have their own
stack. But processes may also share address space.
This is done automatically by the kernel to save
memory. For instance, when two different users use
the same editor, the program is only loaded into
memory once. The data are not shared in this case,
so it must not be confused with shared memory,
which will be described later (Bowet and Cesati
2001:1-34).
3.4 The Soft Real-Time 2.6 Kernel
It is possible to categorize Real-Time operating
systems into two camps; those which support Soft
Real-Time responsiveness and those which support
Hard Real-Time responsiveness. Real-Time
responsiveness can be defined as “the ability of a
system to respond to external or clock events within
a bounded period of time.”(Singh, 2004) The 2.6
kernel of Linux is regarded as a Soft Real-Time
operating system, where determinism is not critical.
That is, a fast response is desirable, but an
occasional delay does not cause malfunction. This is
the contrary to a Hard Real-Time operating system,
such as a flight control system, where a deadline
never may be missed.
Soft Real-Time responsiveness is a requirement
to mobile phones. Even though there are
requirements to multiprocessing, it is still a mobile
phone
and the phone specific services such as calls
and messages will have to be prioritized before other
applications and events. Before the 2.6 kernel
release, special patches were necessary to achieve
sufficient responsiveness. The improved
responsiveness of the 2.6 kernel is mostly due to
three significant improvements: a preemptible
kernel, a new efficient scheduler, and enhanced
synchronization. These improvements have
contributed to make Linux an even better suited
operating system for mobile phones.
WINSYS 2007 - International Conference on Wireless Information Networks and Systems
248
3.4.1 The Pre-emptive 2.6 Kernel
Even though most UNIX kernels used to implement
non-pre-emptive kernels as a solution to
synchronization problems, the Linux 2.6 kernel
implements pre-emption. In earlier releases of the
Linux kernel, and like most general-purpose
operating systems, the task scheduler was prohibited
from running when a process were executing in a
system call. The task would control the processor
until the return of the system call, no matter how
long that would take. Hence, the kernel could not
interrupt a process to handle a phone call within an
acceptable time limit. The 2.6 kernel is to some
degree preemptive, meaning that a kernel task may
be preempted with a low interruption latency to
allow the execution of an important user application.
The preemtion is triggered by the use of
interruptions. A microprocessor typically has a
limited number of interrupts, but an interrupt
controller allows the multiplexing of interruptions
over a single interrupt line. There also exist priorities
among the interrupts. (Bowet, and Cesati, 2001)
This means that a process that is executing in
Kernel Mode can be suspended and substituted by
another process because it has higher priority. The
operating system must be able to handle multiple
applications and processes. For a mobile phone with
soft Real-Time requirements such functionality is
essential, as it must be able to handle important tasks
such as an incoming phone call while the user is
filming a video etc.
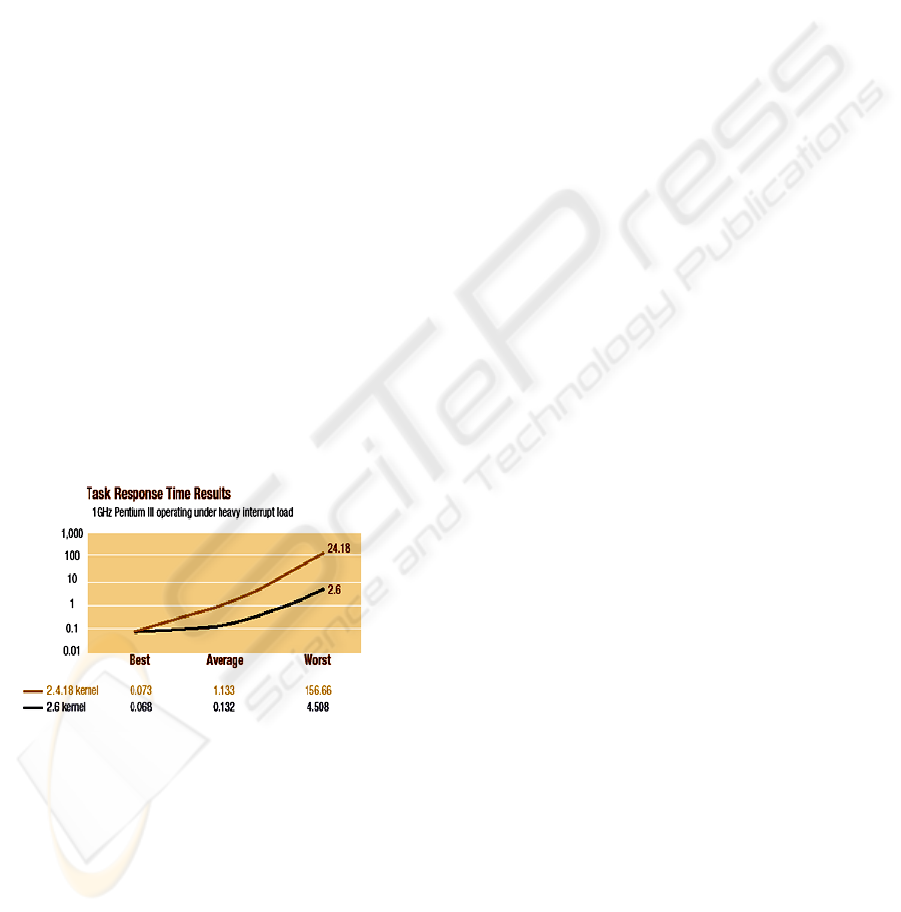
Figure 2: A comparison between the task response time of
the 2.4.18 Linux kernel and the 2.6 kernel. (Singh, 2004).
Compared to a PC, the processing power is
reduced, but the requirements to responsiveness are
higher. The kernel code is laced with preemption
points allowing the scheduler to run and possibly
block a running process so as to schedule a higher
priority process. Linux is still not a true Real-Time
operating system, but it is certainly less jumpy than
before and considerable faster than its predecessors,
as seen in figure 2.
3.4.2 The New O(1) Scheduler
The 2.6 kernel has a totally new process scheduler
that replaces the slow algorithms of earlier kernels.
Earlier, the scheduler would have to look at each
ready task and score its relative importance to decide
which task to run next. The new scheduler no longer
scans every task every time, but uses two queues.
When a task is ready to run, it will be sorted and
placed in a queue, called the current queue. The
scheduler then chooses the most favourable one in
this queue to run next, giving each process a
specified time to occupy the processor. Opposite to
earlier, this is done in a constant amount of time, and
not relative to the number of processes. After its
time in the processor expires, the process is placed
in the other queue, called the expired queue. The
process is then again placed according to its priority.
When all the tasks in the current queue are done, the
scheduler once again starts its simple algorithm of
picking tasks from the expired queue, which now is
called the current queue. This new scheduler works
substantially faster than the previous scheduler, and
it works just as fast with many tasks as with few
(Deshpande, 2004).
3.4.3 Synchronization
By implementing a re-entrant kernel, one also
introduces the need for synchronization among
kernel control paths. One must ensure that while
acting on a kernel data structure, no other kernel
control path is allowed to act on the same data
structure, even if the first one suspend the data
structure. The data structure must be put back into a
consistent state.
Let’s say that we have one global variable V
representing available items of some system
resource. If a first kernel control path reads V, it sees
that it is 1. Another kernel control path reads the
same variable, and decreases it to 0. When A
resumes its action, it has already read V and
decreases it. As a result, the value of V is now -1.
The two kernel control paths are using the same
resource, which could result in serious errors.
When the outcome of a computation depends on
how the processes are scheduled, the code will be
incorrect and we have a race condition. Safe access
to global variables is ensured by using atomic
operations, which refers to combining the operations
from two or more kernel control paths so they
appear as one to the rest of the system. Any section
of code that can not be entered by a process before
another one has finished it is called a critical region.
The 2.6 kernel implements something that is
referred to as futex – fast user-space mutexes. It is a
new implementation of the mutex previously
LINUX MOBILE - A Platform for Advanced Future Mobile Services
249

implemented as system calls to check that only one
task is using a shared resource at a time. This time-
consuming system call to the kernel to see whether
block or allow a thread to continue was often
unwarranted and unnecessary. Futex checks user-
space to see whether a blocking is necessary, and
only issues the system call when blocking the thread
is required. This saves time. The function also uses
the scheduling priority to decide which thread is
allowed to execute in case of a conflict (Singh,
2004), (Deshpande, 2004).
4 COMPUTER VERSUS MOBILE
PHONE
Adapting Linux for mobile phones first requires a
thorough study of the similarities and differences
between the two hardware platforms, i.e. between
the ordinary computer and the mobile phone. The
most significant difference is usually the processor
architecture, where x86 is the most common on
regular PCs and ARM is the most common on
mobile phones. The ARM architecture is generally
better on performance, power, and integration for
mobile phones. But the choice of a non-x86
architecture, which Linux was originally built for,
first of all results in necessary porting of some low-
level drivers.
4.1 Necessary Subsystems
There are certain subsystems that are required for
Linux to work on all systems. Generally the kernel
can be split into these following subsystems:
• Hardware Abstraction Layer
• Memory Manager
• Scheduler
• File System
• IO subsystem
• Networking subsystem
The scheduler has already been discussed, but
the Hardware Abstraction Layer, Memory Manager,
File Systems, and IO subsystem will be described
briefly.
4.1.1 Hardware Abstraction Layer
A Hardware Abstraction Layer (HAL) is a more
concrete name of the underlying low-level interfaces
that are supposed to give higher level languages the
ability to communicate with lower level
components, such as directly with hardware.
Its function is to hide differences in hardware
from most of the operating system kernel, so that
most of the kernel-mode code does not need to be
changed to run on systems with different hardware.
The HAL supports these hardware components,
which are usual on both platforms:
• Processor, cache, and MMU
• Setting up the memory map
• Exception and interrupt handling support
• DMA
• Timers
• System Console
• Bus Management
• Power Management
4.1.2 Memory Manager
The task of the memory manager is to control
memory access to the hardware memory resources.
In Linux the memory manager implements a logical
layer for as the Memory Manager Unit being able to
provide virtual memory to kernel subsystems such as
drivers, file systems, and networking stack. But also
it provides virtual memory to user applications. The
advantages of virtual memory can be summarized
with these points:
• Several processes can be executed
concurrently
• It is possible to run applications whose
memory need are larger than the
available physical memory.
• Processes can execute a program whose
code is only partially loaded in the
memory.
• Each process is allowed to access a
subset of the available physical
memory.
• Processes can share a single memory
image of a library or a program.
• Programs can be relocatable – that is,
they can be placed anywhere in
physical memory.
• Programmers can write machine-
independent code, since they do not
need to be concerned about physical
memory allocation.
All this is solved by the use of a virtual address
space, which is representation of physical locations
located by the MMU and the kernel. The virtual
address space is also referred to as a linear address
space. The virtual addresses are divided by the
kernel into page frames with a size of 4 or 8 KB,
which result in that a request for contiguous virtual
address space can be satisfied by allocating a group
of page frames that do not necessarily have
contiguous physical addresses. All the pages are
WINSYS 2007 - International Conference on Wireless Information Networks and Systems
250

accessible by the kernel, but only some of them get
used by the kernel. The paging process only involves
the applications, which get pulled into main memory
on request. By using virtual addresses a running
process will not be able to corrupt neither another
process’s nor the operating system’s memory. This
means that any pointer corruptions within a process
are localized to the process itself, and will not bring
down the system. This is important for system
reliability.
On the other hand, the 2.6 kernel allows the
system to be built without a virtual memory system.
This is often to meet real-time requirements. Slow
handling of page faults can ruin responsiveness. A
page fault is when a demanded page is not in
physical memory and an interruption has to be
raised. Of course, a no virtual memory solution
removes the advantages previously mentioned, and it
becomes the software designer’s responsibility to
ensure there will always be enough real memory
available to meet the applications demands. The
issue of whether to use virtual memory or not is left
to the programmer.
4.1.3 File Systems
There are many file systems that can run on Linux.
Ext2, CRAMFS, ROMFS, RAMFS, NFS, DEVFS,
and JFFS2 are often used on embedded systems. As
a general point, the hardware memory/storage
technology used on the device may set limitations to
the choice of file systems. The kernel supports them
all through a concept called the Virtual File System
(VFS). VFS handles all the system calls related to
the file systems. The file systems must translate their
physical organization into a common file model
which can represent all the supported file systems. In
that way, to interact with the different file systems
the kernel (i.e. the VFS) has only one interface to
relate to.
It is necessary for every Linux system to have a
root file system. This is the master file system which
gets mounted during start-up. In Linux, everything is
a file, even the directories and the I/O devices.
UNIX systems also implement a current working
directory for every process.
The PROCFS or /proc file system, is a special
file system as it is a pseudo file system that resides
in memory and is created every time the system is
rebooted. The /proc directory reveals important data
on the running processes and the state of the system
itself. It is readable by the owner of the processes
and the root. This openness and access to devices is
very useful for programming.
4.1.4 I/O Subsystem
The most difficult part of porting Linux to a mobile
phone is not the main configuration of the kernel,
but the programming of the low-level interfaces
which are special for this kind of embedded devices.
For the programmer, the IO subsystem provides a
simple and uniform interface to onboard devices.
Special or not, on a mobile phone I/O devices will
typically involve devices such as keypad, camera,
Bluetooth, LCD screen, and non-volatile storage in
some form, but also the drivers for the GSM/GPRS
Digital Baseband Subsystem related functions.
Those are often provided by the board
manufacturers, such as Texas Instruments, or by the
operating system vendors, such as MontaVista.
These must be custom made to the hardware
architecture and this is a process that may be
troublesome (Raghavan, Lad and Neelakandan,
2005).
The I/O subsystem supports three kinds of devices:
• Character devices for supporting sequential
devices
• Block devices for supporting randomly
accessible devices. Block devices are
essential for implementing file systems.
• Network devices that support a variety of
link layer devices.
4.2 The MTD Subsystem
In Linux, memory technology devices are all kinds
of memory devices: RAM, ROM, and Flash in
different technological solutions. The Memory
Technology Devices (MTD) subsystem is a module
of the Linux kernel. The MTD subsystem intends to
provide a uniform and unified access to memory
devices for the VFS. In that way it avoids having
different tools for different technologies. The MTD
subsystem consists of low-level chip drivers and
high-level interfaces called MTD user modules. The
user modules are software modules in the kernel that
enables access to the chip drivers through
recognizable interfaces and abstractions, which in
turn are provided to the higher levels of the kernel
and in some cases to user space.
The typical operations the MTD subsystem has
to carry out is erase, read, write, and sync. The
system works in a manner where the chip drivers
register sets of predefines call-backs and properties
with the MTD subsystem. The call-backs and
properties are defined in an mtd_info structure,
which is provided to the add_mtd_device() function.
These call-backs are then called through this
function.
LINUX MOBILE - A Platform for Advanced Future Mobile Services
251

There is no “standard” physical address location
for the MTD devices, and therefore they need a
customized mapping driver. In addition, some
systems and development boards have known MTD
device configurations. The kernel therefore contains
a number of specific drivers for these systems. The
drivers are found in the drivers/mtd/maps/ directory
of the kernel sources.
On a mobile phone a combination of the
CRAMFS and the JFFS2 file systems is a well
known working combination. CRAMFS for the non
changing boot image which is extended into RAM
on start-up and JFFS2 for the writable persistent file
system
(Yaghmour, 2003).
5 SERVICE DEVELOPMENT
FOR LINUX MOBILE
5.1 Trolltech
Trolltech is a Norwegian company with two product
lines; Qt (pronounced cute) and Qtopia. They were
one of the first companies in the world to use a dual
licensing model. The business model allows
software companies to provide their products for two
distinct uses - both commercial and open source
software development. This type of licensing is
based on Quid Pro Quo – Something for something.
Either the customers of Trolltech may release their
software under the GNU Public License, GPL, or
they may purchase the appropriate number of
commercial licenses from Trolltech and release the
software under a license of choice.
Trolltech means that this strategy will make
them able to provide the best cross-platform
development tools in the world. The commercial
license makes the money, and the open source
licenses ensure quality and stability of the products
delivered by Trolltech.
5.1.1 Qtopia Core
Qt is a cross-platform application development
platform. Qt includes the Qt Class Libraries, which
is a collection of over 400 C++ classes. Further it
includes Qt Designer for rapid GUI and forms
development, and other tools as well. “The Qt class
libraries aim to provide a near-complete set of cross-
platform application infrastructure classes for all
types of C++ applications.” Qtopia Core is the
application framework for single-application devices
powered by embedded Linux. It provides the same
API and tools as other versions of Qt, but it also
includes classes and tools to control an embedded
environment.
5.1.2 Qtopia Phone Edition and Greenphone
Qtopia Phone Edition is the phone intended version
of Qtopia Core. It is an application platform and user
interface for Linux-based mobile phones. Trolltech
claims that Qtopia Phone Edition is the de-facto
standard application development platform and user
interface for Linux-based mobile phones.
Also, Trolltech have developed a dual licensed
hardware component of the Greenphone SDK. This
SDK provides a complete environment for
developing and modifying application software for
Qtopia Phone Edition on the Greenphone (Trolltech:
Code less – Create More (n.d.).).
Figure 3: Qtopia Phone Edition diagram (Trolltech: Code
less – Create More (n.d.).).
5.2 MontaVista
MontaVista offers an optimized Linux operating
system and development environment for both
wireless handsets and mobile phones with
requirements for power management, hard real time
performance, fast start-up, and small footprint,
called Mobilinux.
5.2.1 Mobilinux
The current version of Mobilinux is based on the
Linux 2.6 kernel. It uses the reduced C library
uClibc, DirectFB on top of the Linux Framebuffer
Device, and SquashFS as the compressed read-only
file system to be able to provide a reduced footprint.
The Linux framebuffer, fbdev, is a graphic
hardware-independent abstraction layer to show
graphics on a console without relying on system-
specific libraries. Further, Mobilinux has improved
Real-Time support and implements a fully
preemptible kernel through MontaVista’s
enhancements. (Montavista Software – Platform to
innovate (n.d.).).
WINSYS 2007 - International Conference on Wireless Information Networks and Systems
252

5.3 The OpenMoko Strategy
The OpenMoko camp, with its NEO1973, has taken
on another business strategy than Trolltech and
MontaVista. They favour a complete open strategy,
as any regular PC intended open source Linux
distribution.
The software of the mobile phone is based on the
2.6.20 kernel. It runs on a Samsung board with 64
MB NAND flash and 128 MB RAM. At the moment
it has GSM/GPRS, USB, and Bluetooth support. It is
equipped with a touch screen, and only two buttons
for power and for auxiliary devices. It uses U-boot
as boot loader.
Further this open source project provides a
development framework, namely the Open Mobile
Communications Platform (OpenMoko). The project
intends to provide a completely open standard
framework for developing mobile phone
applications, much like Trolltech. The phone comes
shipped with a package manager to be able to take
full advantage of the all ready large Linux
application community.
The key of OpenMoko’s business strategy is to
trigger the open source community first. With them
they will be able to ensure increased revenues for
both carriers and handset developers. The idea is to
let the users control their own environment of
applications. The handset manufacturers can get a
reduced time to market and the carriers will
experience a large increase in data traffic.
Applications may form the next generation of multi
billion industry similar to that of ringing tones. It’s a
win-win situation for all three parts; users, carriers,
and handset manufacturers (OpenMoko: The
World’s First Integrated Open Source Mobile
Communications Platform (n.d.).).
6 CONCLUSION
What have been presented in this paper are the
fundamental mechanisms of Linux, with a focus on
the latest major kernel release. The most important,
main components that must be included in an
embedded environment are discussed, and the paper
clearly describes how a standard Linux kernel may
be adapted to fit the mobile device.
Further, some of the important differences
between the hardware platform of the computer and
the hardware platform of a typical mobile phone are
shown.
In addition, the paper has elaborated the
challenges and opportunities of employing Linux as
an enabler for advanced services on mobile phones.
REFERENCES
The Diffusion Group, 2006, February 7. Windows & Linux
to Displace Symbian as Dominant Force in Advanced
Mobile Operating Systems.
http://www.tdgresearch.com/press066.htm
Blandford, R., 2006, February 8. TDG claim Symbian will
be behind Linux and Microsoft by 2010. Retrieved
March 28, 2007, from All About Symbian Web site:
http://www.allaboutsymbian.com/news/item/TDG_cla
im_Symbian_will_be_behind_Linux_and_Microsoft_
by_2010.php
Cheap, hackable Linux smartphone due soon, 2006,
November 7. http://www.linuxdevices.com/news/
NS2986976174.html
OpenMoko: The World’s First Integrated Open Source
Mobile Communications Platform, (n.d.). Retrieved
March 28, 2007, from www.openmoko.org
Purdy, J. G., January, 2007. Mobile Linux: Why it will
become the dominant mobile OS.
http://www.fiercewireless.com/story/feature-mobile-
linux-why-it-will-become-the-dominant-mobile-
os/2007-01-03
Benchmark clocks OMAP2420 graphics on Linux,
Symbian. February 2, 2006. http://linuxdevices.com/
news/NS6023095418.html
Yaghmour, K., 2003. Building Embedded Linux Systems,
Sebastopol, CA: O’Reilley
Embedded Linux Graphics Quick Reference Guide, (n.d.).
http://linuxdevices.com/news/NS6023095418.html
Raghavan P., Lad A. and Neelakandan S., 2005.
Embedded Linux system design and development,
Boca Raton, FL: Auerbach Publications
Bowet, D P. and Cesati, M., 2001, Understanding the
Linux Kernel, 1
st
edition, Bejing: O’Reilly.
Singh, I. M., 2004, Embedded Linux: The 2.6 kernel is
ideal for specialized devices of all sizes,
http://www.lynuxworks.com/corporate/news/2004/linu
x-kernel-2.6.php
Deshpande A. R., 2004, March 4, Linux Kernel 2.6: the
Future of Embedded Computing, Part I. Retrieved
March 28, 2007, from the Linux Journal Web site:
http://www.linuxjournal.com/article/7477
The OMAP 730 Digital Baseband (n.d.). Retrieved March
28, 2007, from http://focus.ti.com/general/docs/
wtbu/wtbuproductcontent.tsp?templateId=6123&navig
ationId=12003&contentId=4676
Trolltech: Code less – Create More. (n.d.). Retrieved
April 3, 2007, from www.trolltech.com
Montavista Software – Platform to innovate. (n.d.).
Retrieved April 3, 2007, from www.mvista.com
LINUX MOBILE - A Platform for Advanced Future Mobile Services
253
