
Extending CADP for Analyzing C Code
⋆
M. Mar Gallardo
1
, P. Merino
1
and D. Sanan
1
LCC, Universidad de Malaga
Abstract. Many existing open source projects are written with the classic pro-
gramming language C. Due to the size and complexity of such projects this ap-
plications require C-oriented methods and tools to increase their realibility. For
instance, advanced reachability analysis techniques like model checking, that tra-
ditionally have been applied to software models, are now being considered as very
promising methods to detect execution failures in final code. This paper focuses
on extending the well known toolbox CADP in order to make it easier to analyze
realistic concurrent C programs that make use of external functionality provided
via well defined application programming interfaces (APIs). Our approach con-
sists in constructing a tool to convert the C code into the usual formats expected
by the set of tools integrating CADP (Construction and Analysis of Distributed
Processes). The new module allows us to exploit all the functionalities of CADP
to assist software reliability: model checking, equivalence checking, testing, dis-
tributed verification or performance evaluation.
1 Introduction
Currently, it is widely accepted that the different phases during the development of huge
and complex software systems should be assisted by analysis tools, to ensure that the
final product satisfies certain critical properties for the system under construction.
Research in the context of formal methods has provided specification and modelling
languages, algorithms, tools and methodologies to automate diverse tasks that may help
in the construction of good quality software. Nevertheless, due to time or memory con-
straints, most of these proposals apply to models (simpler descriptions/abstractions) of
the real system to be executed. For instance, many enterprise information systems are
partially or completely modeled to check some desired properties before the final sys-
tem is implemented. An example of this are proposals [8] and [13], where authors
model an Airport Terminal and a Suspendible Business Process, respectively.
Analysis during the software design phase is highly desirable, but it could also be
very useful in the implementation phase since it could reveal new errors introduced in
the (manual) code generation. Nowadays many academic projects, and even commercial
ones, are working on adapting the model-oriented methods to most commonly used
implementation languages. However, the number of tools that are currently able to deal
with the reliability of final software is still very small, and the range of application
is limited to very few tasks, such as verification using model checking with tools like
SLAM [1] or JPF [12].
⋆
Work partially supported by TIN2004-7943-C04-01 and TIN 2005-09405-C02-01
Mar Gallardo M., Merino P. and Sanan D. (2007).
Extending CADP for Analyzing C Code.
In Proceedings of the 5th International Workshop on Modelling, Simulation, Verification and Validation of Enterprise Information Systems, pages
104-113
DOI: 10.5220/0002430001040113
Copyright
c
SciTePress

The goal of this paper is to extend the well known toolset CADP [6]
1
, adding new
capabilities to assist in the development of reliable software, not only during the first
stages of the lifecycle software, but also in the last stages, when encoding is being
completed. The paper describes the successful development of our previous proposal in
[4] towards using CADP as an environment for the analysis of C .
Toolset CADP offers several functionalities to manage specification languages (like
LOTOS), such as compilers to CADP internal languages, equivalence checking, model
checking, visualization of the execution graph, static analysis or performance evalu-
ation. However, in order to extend all these functionalities and use them in a more
complete software engineering process, we still need new compilers for standard pro-
gramming languages.
CADP is an open platform which allows users to integrate new specification, ver-
ification or analysis techniques. It provides libraries that may be used to extend the
toolbox at different levels. Thus, our tool C.Open
2
permits reusing the different mod-
ules offered by CADP to analyze C programs. To do this, C.Open translates the C code
into an implicit labelled transition system (LTS), which is the CADP internal format.
Furthermore, C.Open is specially oriented to analyzing C programs with calls to well
defined APIs. As explained in [2], the analysis of software with calls to external appli-
cation programming interfaces (APIs) makes it necessary to construct models of all the
functions provided by the API. In the paper, we provide a scheme to model APIs which
is compatible with CADP architecture.
Through several examples, the paper shows how we can use different functionalities
of the CADP environment (such as explicit graph generation, reduction or simulation)
to analyze C programs. Although the proposal is applicable to generic APIs, the ex-
amples make use of a specific API that provides functions to correctly share memory
regions between C processes. During translation, calls to this API are substituted by
models of its behavior written in C. Our compiler generates the necessary data struc-
tures to exploit all the features in CADP. Moreover this is the base to obtain C-oriented
tools like model checkers or tools for testing equivalence.
The paper is organized as follows. Section 2 gives an introduction on
OPEN/CAESAR [5]. Section 3 illustrates the input language of the tool, and the kind
of code that C.Open can manage. Section 4 shows the use of C.Open with an example
consisting of two C concurrent programs that communicate via shared memory. Finally,
Section 5 gives the conclusions and future work.
2 CADP Overview
CADP can be considered as a traditional toolbox for the analysis of communication
protocols. Through a modular architecture, CADP includes compilers to translate sev-
eral input formalisms into a generic format (an LTS) which is used by applications as an
internal representation of the input language. Figure 1 shows the different formalisms
accepted by CADP inside boxes, and dashed lines represent the different compilers.
1
CADP web site: “http://www.inrialpes.fr/vasy/cadp.html”
2
C.Open web page: “http://www.lcc.uma.es/gisum/tools/smc”
105

As shown in the figure, C.Open adds language C to the CADP architecture as alterna-
tive input. The modular structure of CADP makes it possible to reuse the whole set of
applications present in the environment.
Fig.1. Schema of the extended CADP architecture including C.Open.
2.1 Labelled Transition Systems: The Internal Format
As commented above, the different tools in CADP accept models of systems described
as LTSs. An LTS is a tuple (S, L, T, q
0
) where S is the set of system states, and q
0
∈ S is
the initial state. Set T ⊂ S × L× S defines the transition relation, L being a set of labels
used to identify transitions. As usual, transition (q, l, q
′
) ∈ T is written as q
l
→ q
′
, and
it represents system evolution from state q to q
′
by executing sentence l .
Labels may represent instructions dealing with global data structures used to com-
municate or synchronize processes or, on the contrary, they may refer to internal actions
in a given process. We use the special label ι to generically denote all these local ac-
tions. Thus, in C.Open, labels ι represent transitions involving only C statements that
do not contain any external call.
The CADP input language may be transformed into an implicit or an explicit LTS.
The implicit representation of an LTS consists of C representations of the states and
labels along with the necessary primitives to handle them. It also provides primitives to
compute the initial state and the successors of any given state. The explicit representa-
tion records the LTS graph, storing the whole set of transitions T . In an LTS of several
hundreds of thousand of states, this representation may be too big.
106

Since real software written in C may produce very large LTSs, we have used the
implicit representation when extending CADP with C oriented tools. The implicit LTS
is given by two primitives to handle the corresponding transition relation: a function to
obtain the initial state of the system, and a function to generate all the successor states
of any given state. In addition, the implicit LTS provides primitives to print, compare
and hash generation of states and labels.
2.2 CADP Modules
CADP includes a wide set of tools providing different functionalities. For example,
it contains a module to analyze whether two LTSs are bisimilar. It also provides sev-
eral model checkers for various temporal logics and for µ-calculus. It implements sev-
eral verification algorithms including exhaustive verification, on-the-fly verification,
symbolic verification using Binary Decision Diagrams, and compositional verification
based on refinement. CADP has been recently extended with other programming lan-
guage oriented tools like ANNOTATOR [3].
Some of the tools in CADP are particularity interesting for the software engineer-
ing community. For instance, EVALUATOR (model checker for mu-calculus formu-
las), TGV ( generator of conformance test suites), BISIMULATOR (checker of equiva-
lence relations), REDUCTOR (LTS on-the-fly reduction with respect to a relation), EX-
HIBITOR (search patterns of execution sequences), OCIS and SIMULATOR (graphical
and command-line simulators, respectively).
2.3 Extending CADP
CADP is not only a set of tools, but also a tool development framework.
OPEN/CÆSAR is an interface for the creation of new modules in the CADP toolkit.
OPEN/CÆSAR separates the functionalities of each application in three different
modules: the graph, the storage and the exploration modules. The exploration mod-
ule performs the basic functionality of the application and the operations needed to
handle the storage and graph modules. The storage module is constituted by a set of li-
braries, included in OPEN/CÆSAR, representing several structures to store the labels
and states of the LTS. Finally, the graph module provides the exploration module with
the necessary operations to handle the implicit LTS, that is, to handle states, labels and
to generate the successor states.
CADP only provides compilation for some specification languages, such as LO-
TOS or binary code graphs (BCG), through the tools CAESAR.OPEN and BCG
OPEN;
however, as commented above, it does not support programming languages. C.Open,
based on [4], extends CADP, making it possible to use the whole environment with C
programs.
3 C.Open Input Language
Most proposals to formally analyze C code only consider closed C programs, that is,
programs where the implementation of all functions is available to be executed by the
107
analysis tool. In this context, tool C.Open provides a new functionality, since it can
manage C programs that make calls to an external API. Furthermore, the programs can
actually use the external API to form a concurrent system. Given this concurrent system,
C.Open may construct its state spaces on-the-fly.
In order to deal with external APIs, we need to construct models of the external calls.
These models are, in fact, abstractions of the real behavior of the external functions.
They only provide the minimum functionality required to carry out the analysis. For
instance, if an external function deals with intermediate communication buffers, we
probably do not need to implement buffers with their real size, it might be sufficient
to use some type of reduced buffers. In fact, due to the state space problem, reducing
the complexity of real data structures is essential to obtain effective analysis tools, like
model checkers. The models of external calls are C functions which are executed by
the graph module when it is generating the successors of a given state if any of them
correspond to one external function.
The decision about how to model external functions strongly depends on the prop-
erties to be analyzed on the system. In any case, the transitions of the resulting LTS may
be labelled with ι representing an atomic sequence of internal C sentences (including
no external call) or, on the contrary, they may be labelled with a call to the model of an
external function. In summary, we can deal with any kind of C code provided models
of all external calls to the corresponding API are given. The next section explains how
to obtain models of external functions.
3.1 The External API
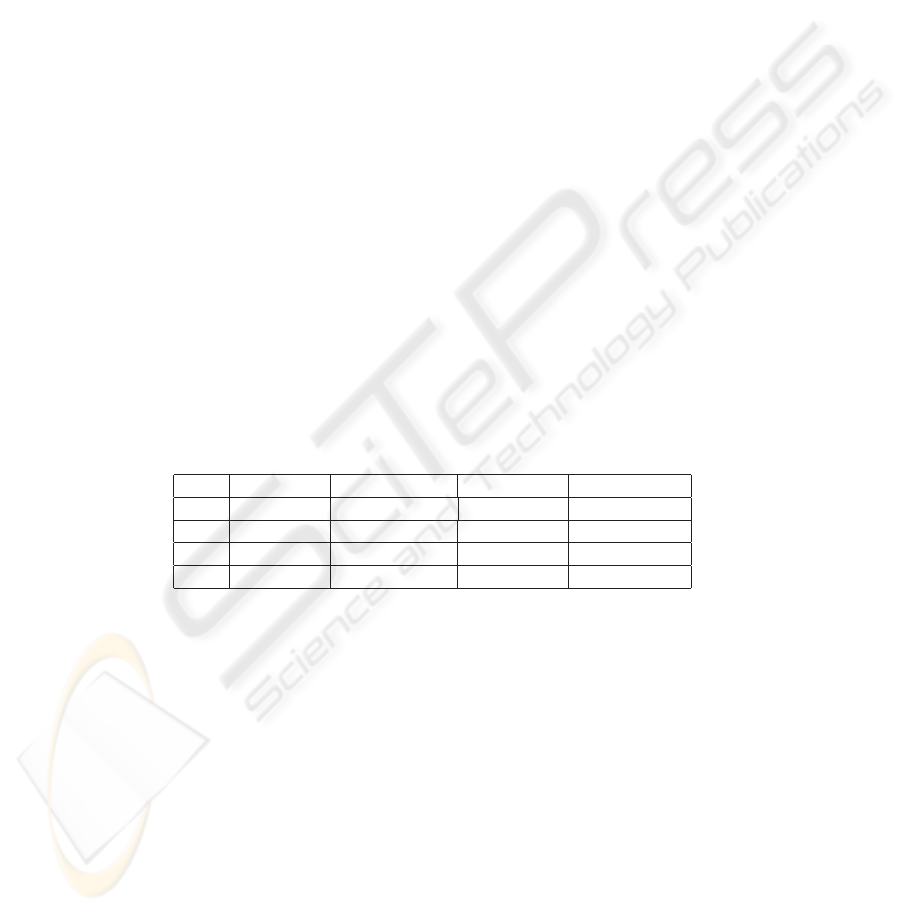
Table 1. Shared Memory API functions.
func. return arg 1 arg 2 arg 3
screate reg.id(int) reg name(char *) sizeof reg.(int) value(void *)
sread value(void *) reg.id(int)
swrite code(int) reg.id(int) value(void *) sizeof value(int)
sclose code(int) reg.id(int)
For external calls to the language, C.Open needs a model of these functions written
in C and a translation rules file for translating the external API functions into the corre-
sponding modelled function. Table 1 shows, as an example, the API Shared Memory,
also used in Section 4, that provides four basic functions to deal with a shared resource,
that is, create, read, write and close. The shared memory is composed of sev-
eral regions, each one with a unique name and size. When screate is called with
a given name, size and initial value, a new region is created, provided that no region
has been previously created with the same name, size and initial value. Otherwise, if
there was a region with the same name, the function call returns the region identifier
previously assigned. The other operations, sread, swrite and sclose, are used
to read from, write to, or close the region specified by the corresponding argument. In
particular, the sclose operation decreases the number of references to that region,
108

deallocating the reserved memory if there are no references left. Any attempt to access
a non-existent region returns an error code.
C.Open makes use of the so-called translation rules to properly transform each
external function. These rules are given in an XML file where, for each function call, the
arguments that must be preserved or that must be added in the modelled function are
specified. For example, Figure 2 shows the translation rules for the function sread. It
indicates that sread is translated into function read
shared memory, which has
two arguments: the first one refers to the first argument of sread, and the other is
the value returned by the function. It is possible that an argument may have a different
representation in the label of the LTS, being represented by the name of the variable
instead of the real variable value, like the first argument of the sread.
<function name="sread" sname="read_shared_memory" type="1"> <arg
typeArg="1" argref="0" type="int" labeltype="char"
varname="yes" labelsize="20" labelname="desc"/>
<arg typeArg="0" type="void
*
" labeltype="int" returned="true"/>
</function>
Fig.2. sread translation rules.
4 Example
In order to highlight the benefits of the translation from C to LTS, we show how the
different CADP tools can be used to analyze C programs with calls to an external API.
In particular, the API example in section 3.1 will be used together with a model of this
API. We will show how C.Open works implementing the Peterson’s mutual exclusion
algorithm [11] and using several CADP tools as generator, simulator or evaluator to
prove the correctness of the programs. This algorithm can be used, for example, as a
mechanism to ensure data consistency in multi-user database systems, which are present
in many enterprise information systems.
4.1 The Sample Program
The system to be analyzed is composed of two programs, p0
peterson.c (figure 3) and
p1 peterson.c, that use the Peterson mutual exclusion algorithm for access to a com-
mon critical section. Both programs are symmetrical, they only differ in the pid, and
in the control flag variables that guard the critical section. The program begins with
the creation of the shared variables that control the critical section. Before going into
the critical section, both processes make an active wait for the critical section. Before
closing the shared variables, each process updates the flag shared variable to ensure that
the other process can not exit from the active wait.
4.2 Generating the Explicit Graph using Generator
C.Open generates an executable application (e.g., generator.exe) by performing the re-
quired sequence of tool invocations: translation by C2Xml of C programs into PIXL [9]
109

int main (int argc, char
**
argv) {
unsigned int flag0_des, flag1_des, turn_des;
int flag0_value, flag1_value, turn_value;
int flag0_res, flag1_res, turn_res;
int pid, initial_value;
/
*
Local process identification
*
/
initial_value = 0;
pid = initial_value;
/
*
Initialization of shared variables
*
/
flag0_des = screate ("flag0", /
*
descriptor name for flag0
*
/
sizeof (flag0_value), /
*
value size of flag0
*
/
&initial_value /
*
initial value for flag0
*
/ );
flag1_des = screate ("flag1", /
*
descriptor name for flag1
*
/
sizeof (flag1_value), /
*
value size of flag1
*
/
&initial_value /
*
initial value for flag1
*
/ );
turn_des = screate ("turn", /
*
descriptor name for turn
*
/
sizeof (turn_value), /
*
value size of turn
*
/
&initial_value /
*
initial value for turn
*
/ );
/
*
Behavior of process 0
*
/
flag0_value = 1;
flag0_res = swrite (flag0_des, /
*
descriptor for flag0
*
/
&flag0_value, /
*
pointer to flag0 value
*
/
sizeof (flag0_value) /
*
value size of flag0
*
/);
turn_value = 1;
turn_res = swrite (turn_des, /
*
descriptor for turn
*
/
&turn_value, /
*
pointer to turn value
*
/
sizeof (turn_value) /
*
value size of turn
*
/);
/
*
Busy waiting for remote process
*
/
pid = (pid + 1) % 2;
while ((
*
(int
*
) sread (flag1_des /
*
descriptor for flag1
*
/ ) == 1) &&
(
*
(int
*
) sread (turn_des /
*
descriptor for turn
*
/ ) == 1))
{
printf ("Waiting for process %d\n", pid);
}
/
*
Critical section
*
/
pid = (pid + 1) % 2;
printf ("Process %d is in critical section\n", pid);
/
*
End of critical section
*
/
flag0_value = 0;
flag0_res = swrite (flag0_des, /
*
descriptor for flag0
*
/
&flag0_value, /
*
pointer to flag0 value
*
/
sizeof (flag0_value) /
*
value size of flag0
*
/);
/
*
Close shared memory
*
/
flag0_res = sclose (flag0_des /
*
descriptor for flag0
*
/ );
flag1_res = sclose (flag1_des /
*
descriptor for flag1
*
/ );
turn_res = sclose (turn_des /
*
descriptor for turn
*
/ );
Fig.3. Peterson’s mutual exclusion algorithm using shared memory.
compliant XML models; slicing of the models with respect to the system API and con-
struction of the OPEN/CÆSAR graph module describing the implicit LTS by C2Lts;
and finally, call to the C compiler.
In figure 4 C.Open generates and invokes the executable for generator. The com-
mand line C.Open takes as arguments the input for C.Open and the exploration module,
GENERATOR in this example, with the corresponding parameters (i.e. the file where
GENERATOR will save the bcg generated).
Figure 5 shows the caption of the info for the bcg created by GENERATOR. It has
719 states, but CADP includes several tools to reduce the graph through bisimulation,
being easier to manage and represent that way. Among these applications, REDUCTOR
performs an exhaustive analysis and generates the LTS corresponding to an input bcg.
The resulting LTS is reduced on-the-fly respect to several relations (strong equivalence,
tau-divergence, tau-compresion, tau-confluence, tau*.a equivalence, safety equivalence,
trace equivalence, or weak trace equivalence). So, if we apply REDUCTOR to the bcg
obtained after applying GENERATOR with a total reduction, we get a smaller equiva-
lent LTS, figure 6, with only 157 different states and 288 transitions.
110

Fig.4. Call to C.Open to generate an explicit LTS with generator.
Fig.5. Information of the explicit LTS generated by generator.
4.3 Simulating with Simulator and Executor
It is possible to use SIMULATOR and EXECUTOR for simulating C programs. With
SIMULATOR, we can perform a guided execution of the analyzed programs. From
one state, it is possible to execute one transition, representing an external call or a set
of C sentences without any of the modeled calls, backtrack to a previous state, view
the actual system state or the execution trace. Figure 7 shows a simulation example
with XSIMULATOR. EXECUTOR, on the other hand, performs a random execution,
showing as a result the final execution path.
5 Conclusions and Future Work
C.Open permits the use of the environment provided by CADP for the automatic anal-
ysis of C code. Our approach to extend CADP directly allows us to perform different
kinds of analysis of the C code, like model checking, simulation, bisimulation or static
analysis. New C-oriented functionalities can now be implemented for CADP. Other
proposals for analyzing C code focus only on one functionality, like model checking
(CMC [10] or SLAM [1]) or debugging (gdb [7]).
111

Fig.6. Information of the explicit LTS after being reducted with reductor.
Fig.7. Simulating the application with xsimulator.
As future work, new lines for code analysis can be added, for example, optimization
techniques like partial order reduction to reduce the number of states generated, or
the research to deal with dynamic memory. Another point of interest is the automatic
generation of API models.
More information and upcoming extensions of our tool will be available at
“http://www.lcc.uma.es/gisum/tools/smc”.
References
1. Thomas Ball, Byron Cook, Vladimir Levin, and Sriram K. Rajamani. Slam and static driver
verifier: Technology transfer of formal methods inside microsoft. In IFM, pages 1–20, 2004.
2. M. Camara, M.M. Gallardo, P. Merino, and D. Sanan. Model checking software with well-
defined apis: The socket case. In M. Massink. T. Margaria, editor, Proc. of the Tenth In-
112

ternational Workshop on Formal Methods for Industrial Critical Systems (FMICS05), pages
17–26. ACM SIGSOFT, 2005.
3. M.M Gallardo, C. Joubert, and P. Merino. Implementing influence analysis using parame-
terised boolean equation systems. In Nicolas Halbwachs and Lenore Zuck, editors, Proceed-
ings of the 2nd International Symposium on Leveraging Applications of Formal Methods,
Verification and Validation ISOLA’06 (Paphos, Cyprus), volume 3440 of Lecture Notes in
Computer Science, pages 581–585. IEEE Computer Society Press, November 2006.
4. M.M. Gallardo, P. Merino, and D. Sanan. Towards model checking c code with open/caesar.
In Proc. of MSVVEIS’06, pages 198–201, 2006.
5. H. Garavel. OPEN/CAESAR: An open software architecture for verification, simulation,
and testing. In Bernhard Steffen, editor, Proceedings of the First International Conference
on Tools and Algorithms for the Construction and Analysis of Systems TACAS’98, volume
1384, pages 68–84, 1998.
6. Garavel, H., Lang, F., and Mateescu, R. An overview of cadp 2001. In EASST Newsletter,
number 4.
7. http://sourceware.org/gdb/. GDB, the GNU project debbuger.
8. I. Manataki and K. Zografos. A system dynamics approach for airport terminal performance
evaluation. In Proc. of MSVVEIS’06, pages 206–209, 2006.
9. Gallardo M.M, Martnez J., Merino P., Nuez P., and Pimentel E. Pixl: Applying xml standards
to support the integration of analysis tools for protocols. Science of Computer Programming,
65:57–69, March 2007.
10. Madanlal Musuvathi, David Y. W. Park, Andy Chou, Dawson R. Engler, and David L.
Dill. Cmc: a pragmatic approach to model checking real code. SIGOPS Oper. Syst. Rev.,
36(SI):75–88, 2002.
11. Michel Raynal. Algorithmique du parallelisme : le probleme de l’exclusion mutuelle. 1984.
12. W. Visser, K. Havelund, G. Brat, and S. Park. Model checking programs. In IEEE Computer
Society, pages 3–12, Grenoble,France, sep 2000.
13. Yeung W., Leung K., Wang J., and Dong W. Modelling and model checking suspendible
business processes via statechart diagrams and csp. Science of Computer Programming,
65:14–29, March 2007.
113
