
ROTATION-INVARIANT IRIS RECOGNITION
Boosting 1D Spatial-Domain Signatures to 2D
Stefan Matschitsch, Herbert St
¨
ogner, Martin Tschinder
School of Telematics & Network Engineering, Carinthia Tech Institute, Austria
Andreas Uhl
Department of Computer Sciences, University of Salzburg, Austria
Keywords:
Biometric authentication, iris recognition, rotation invariance.
Abstract:
An iris recognition algorithm based on 1D spatial domain signatures is improved by extending template data
from mean vectors to 2D histogram information. EER and shape of the FAR curve is clearly improved as
compared to the original algorithm, while rotation invariance and the low computational demand is maintained.
The employment of the proposed scheme remains limited to the similarity ranking scenario due to its overall
FAR/FRR behaviour.
1 INTRODUCTION
With the increasing usage of biometric systems in
general the interest in non-mainstream modalities
rises naturally. Iris recognition systems are claimed to
be among the most secure modalities exhibiting prac-
tically 0% FAR and low FRR which makes them in-
teresting candidates for high security application sce-
narios. An interesting fact is that the iris recognition
market is strongly dominated by Iridian Inc. based
technology which is based on algorithms by J. Daug-
man (Daugman, 2004). The corresponding feature
extraction algorithm employes 2D Gabor functions.
However, apart from this approach, a wide variety of
other iris recognition algorithms has been proposed in
literature, most of which are based on a feature extrac-
tion stage involving some sort of transform (see e.g.
(Ma et al., 2004; Zhu et al., 2000) for two examples
using a wavelet transform).
Controlling the computational demand in biomet-
ric systems is important, especially in distributed sce-
narios with weak and low-power sensor devices. Inte-
gral transforms (like those already mentioned or oth-
ers like DFT, DCT, etc.) cause substantial complex-
ity in the feature extraction stage, therefore feature
extraction techniques operating in the spatial domain
have been designed (e.g. (Ko et al., 2007)) thus avoid-
ing the additional transform complexity.
An additional issue causing undesired increase in
complexity is the requirement to compensate for the
possible effects of eye tilt. For example, the match-
ing stage of the Daugman scheme involves multiple
matching stages using several shifted versions of the
template data which is a typical approach. As a conse-
quence, rotation invariant iris features are highly de-
sired to avoid these additional computations.
Global iris histograms (Ives et al., 2004) combine
both advantages, i.e. rotation invariant features ex-
tracted in the spatial domain thus providing low over-
all computational complexity. However, FAR and
FRR are worse compared to state of the art tech-
niques. A recent approach (Du et al., 2006) uses ro-
tation invariant 1D signatures with radial locality ex-
tracted from the spatial domain. Still, also the latter
technique suffers from unsatisfactory FAR and FRR
and thus is only recommended to be used in a simi-
larity ranking scheme (i.e. determining the n closest
matches). In this work we aim at improving this algo-
rithm.
In Section 2, we will review the original version
of the algorithm and then describe the improvements
conducted. Section 3 provides experimental results.
We first describe the experimental settings (employed
data and software used). Subsequently, we present
and discuss our experimental results providing EER
improvements over the original version of the algo-
rithm. Section 4 concludes the paper and gives out-
look to future work.
232
Matschitsch S., Stögner H., Tschinder M. and Uhl A. (2008).
ROTATION-INVARIANT IRIS RECOGNITION - Boosting 1D Spatial-Domain Signatures to 2D.
In Proceedings of the Fifth International Conference on Informatics in Control, Automation and Robotics - SPSMC, pages 232-235
DOI: 10.5220/0001480102320235
Copyright
c
SciTePress

2 ROTATION INVARIANT IRIS
SIGNATURES
Iris texture is first converted into a polar iris image
which is a rectangular image containing iris texture
represented in a polar coordinate system. Note that
the ISO/IEC 19794-6 standard defines two types of
iris imagery: rectilinear images (i.e. images of the en-
tire eye like those contained in the CASIA database)
and polar images (which are basically the result of
iris detection and segmentation). As a further pre-
processing stage, we compute local texture patterns
(LTP) from the iris texture as described in (Du et al.,
2006). We define two windows T (X,Y ) and B(x, y)
with X > x and Y > y (we use 15 × 7 pixels for T and
9 × 3 pixels for B). Let mT be the average gray value
of the pixels in window T . The LTP value of pixels in
window B at position (i, j) is then defined as
LTP
i, j
= |I
i, j
− mT |
where I
i, j
is the intensity of the pixel at position (i, j)
in B. Note that due to the polar nature of the iris tex-
ture, there is no need to define a border handling strat-
egy. LTP represents thus the local deviation from the
mean in a larger neighbourhood.
In order to cope with non-iris data contained in the
iris texture, LTP values are set to non-iris in case 40%
of the pixels in B or 60% of the pixels in T are known
to be non-iris pixels.
2.1 The Original 1D Case
The original algorithm (Du et al., 2006) computes
the mean of the LTP values of each row (line) of the
polar iris image and concatenates those mean values
into a 1D signature which serves as the iris template.
Clearly, this vector is rotation invariant since the mean
over the rows (lines) is not at all affected by eye tilt. If
more then 65% of the LTP values in a row are non-iris,
this signature element is ignored in the distance com-
putation. In order to assess the distance between two
signatures, the Du measure is suggested (Du et al.,
2006) which we apply in all variants.
2.2 The 2D Extension
LTP row mean and variance capture first order statis-
tics of the LTP histogram. In order to capture more
properties of the iris texture without losing rota-
tion invariance we propose to employ the row-based
LTP histograms themselves as features (since his-
tograms are known to be rotation invariant as well
and have been used in iris recognition before (Ives
et al., 2004)). This adds a second dimension to the
signatures of course (where the first dimension is the
number of rows in the polar iris image and the second
dimension is the number of bins used to represent the
LTP histograms).
In fact, we have a sort of multi-biometrics-
situation resulting from these 2D signatures, since
each histogram could be used as a feature vector on
its own. We suggest two fusion strategies for our 2D
signatures:
1. Concatenated histograms: the histograms are sim-
ply concatenated into a large feature vector. The
Du measure is applied as it is in the original ver-
sion of the algorithm.
2. Accumulated errors: we compute the Du measure
for each row (i.e. each single histogram) and ac-
cumulate the distances for all rows.
The iris data close to the pupil are often said to be
more distinctive as compared to “outer” data. There-
fore we propose to apply a weighting factor > 1 to
the most “inner” row, a factor = 1 to the “outer”-most
row and derive the weights of the remaining rows by
linear interpolation. These weights are applied to the
“accumulated errors” fusion strategy by simply mul-
tiplying the distances obtained for each row by the
corresponding weight.
3 EXPERIMENTAL STUDY
3.1 Setting and Methods
For all our experiments we considered images with 8-
bit grayscale information per pixel from the CASIA
1
v1.0 iris image database. We applied the experimen-
tal calculations on the images of 108 persons in the
CASIA database using 7 iris images of each person
which have all been cropped to a size of 280 × 280
pixels.
The employed iris recognition system builds upon
Libor Masek’s MATLAB implementation
2
of a 1D
version of the Daugman iris recognition algorithm.
First, this algorithm segments the eye image into the
iris and the remainder of the image (“iris detection”).
Subsequently, the iris texture is converted into a po-
lar iris image. Additionally, a noise mask is generated
indicating areas in the iris polar image which do orig-
inate from eye lids or other non-iris texture noise.
Our MATLAB implementation uses the extracted
iris polar image (360 × 65 pixels) for further process-
ing and applies the LTP algorithm to it. Following the
1
http://www.sinobiometrics.com
2
http://www.csse.uwa.edu.au/˜pk/
studentprojects/libor/sourcecode.html
ROTATION-INVARIANT IRIS RECOGNITION - Boosting 1D Spatial-Domain Signatures to 2D
233
suggestion in (Du et al., 2006), we discard the upper
and lower three lines of the LTP polar image due to
noise often present in these parts of the data (resulting
in a 360 × 59 pixels LTP patch). The 1D and 2D sig-
natures described in the last section are then extracted
from these patches.
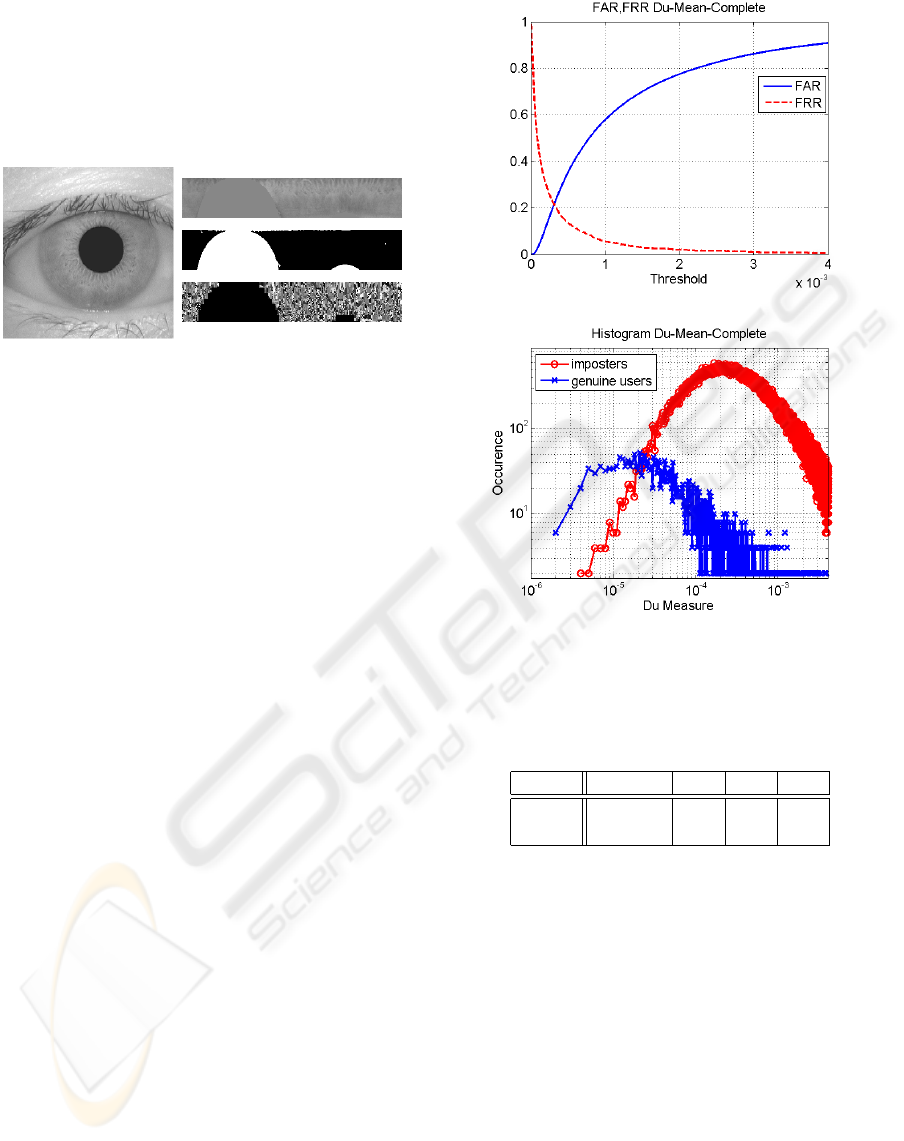
Figure 1: CASIA iris image and the corresponding iris tem-
plate, noise mask, and LTP patch.
Figure 1 shows an example of an iris image of
one person (CASIA database), together with the ex-
tracted polar iris image, the noise mask, and the LTP
patch (template, noise mask, and LTP patch have been
scaled in y-direction by a factor of 4 for proper dis-
play).
3.2 Experimental Results
In Figure 2.a, we show the ROC curve of the origi-
nal version of the Du approach employing 1D signa-
tures based on LTP row mean vectors. EER is rather
high with 0.22 and especially the concave shape of the
FAR curve for the Du algorithm depicts a steep slope
close to zero which means that low FAR values cause
unrealistically high FRR. The latter result illustrates
the reason why this algorithm is restricted to the simi-
larity ranking scenario in the original work (Du et al.,
2006).
The reasons for the respective behaviour can be
seen in Figure 2.b. The overlap between genuine users
and imposters distributions is is very large for the Du
approach, obviously causing the high EER.
When turning to 2D signatures, we compare dif-
ferent fusion strategies and histogram resolutions in
Table 1 with respect to their EER. While it is obvious
that too many histogram bins lead to poor results (im-
portant histogram properties are concealed by noise),
also a reduction to 20 bins results in lower EER as
compared to 100 bins. When comparing the two fu-
sion strategies, accumulating distances (AD) at a row
basis is clearly superior to simple histogram concate-
nation (HC) at a reasonable histogram resolution. In
this scenario, we are clearly able to improve EER
as compared to the original Du algorithm (from 0.22
down to 0.16).
(a) ROC-plot: ERR 0.22
(b) Genuine users and imposters distributions
Figure 2: Behaviour of the original DU algorithm.
Table 1: EER for two assessment variants and different his-
togram resolutions (2D signatures).
# bins 1500450 255 100 20
HC 0.3 0.2 0.18 0.19
AD 0.32 0.16 0.16 0.18
Note also, that histgram resolution up to 255 is
beneficial for accumulating errors fusion while it is
not for histogram concatenation. This is an intuitive
result, since in case of histogram concatenation the
vectors to be compared in the Du measure are already
fairly long overall, while this is not the case for accu-
mulating errors fusion.
Table 2 compares three weighting strategies for
the accumulated errors fusion strategy. The best re-
sults are obtained when using weight 4 for the LTP
row closest to the pupil. This result confirms the as-
sumption, that “inner” iris information is most impor-
tant for recognition purposes.
We display the ROC curve for the best setting for
accumulted error fusion strategy in Figure 3.a. The
graph exhibits a much better behaviour of the FAR
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
234
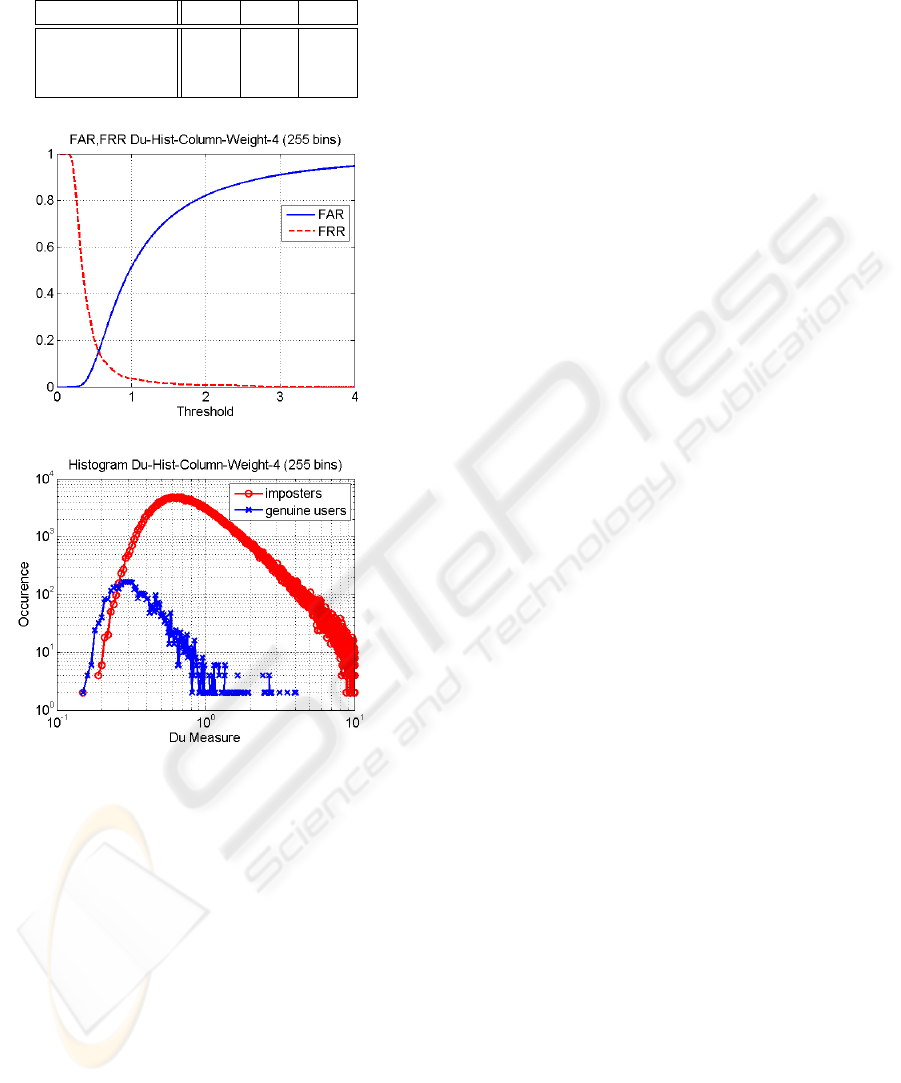
Table 2: EER for three weighting variants and different his-
togram resolutions (2D signatures).
histogram bins 255 100 20
no weight 0.16 0.16 0.18
weight 2 0.15 0.15 0.19
weight 4 0.15 0.15 0.16
(a) ROC-plot: EER 0.15
(b) Genuine users and imposters distributions
Figure 3: Behaviour of best 2D Du variant (accumulated
errors (weight 4, 255 bins)).
curve in proximity of zero as compared to the original
one which documents also the improved behaviour.
Finally, we visualize genuine users and imposters
distributions the same 2D variant of the Du algorithm
in Figure 3.b which confirms improvements with re-
spect to the original algorithm.
4 CONCLUSIONS
In this work we have improved an iris recognition al-
gorithm based on 1D signatures extracted from the
spatial domain by including histogram based infor-
mation instead of mean values. While we succeeded
in maintaining rotation invariance in our improved
version, FAR and FRR are still significantly worse
compared to state of the art identification techniques
which limits this improvement to the employment in
a similarity ranking scheme as it is the case for the
original version.
One reason for the still disappointing behaviour
is as follows: when shifting the different rows in the
polar iris image with a different amount against each
other, the 2D signatures (as well as the 1D signatures
of course) are preserved. This operation corresponds
to the rotation of concentric circles of iris pixels by
an arbitrary amount – still, the signatures for all those
artificially generated images are identical. Our results
indicate that indeed information about the spatial po-
sition of frequency fluctuations in iris imagery is cru-
cial for effective recognition.
ACKNOWLEDGEMENTS
Most of the work described in this paper has been
done in the scope of a semester project in the mas-
ter program on “Communication Engineering for IT”
at Carithia Tech Institute.
REFERENCES
Daugman, J. (2004). How iris recognition works. IEEE
Transactions on Circiuts and Systems for Video Tech-
nology, 14(1):21–30.
Du, Y., Ives, R., Etter, D., and Welch, T. (2006). Use
of one-dimensional iris signatures to rank iris pattern
similarities. Optical Engineering, 45(3):037201–1 –
037201–10.
Ives, R., Guidry, A., and Etter, D. (2004). Iris recognition
using histogram analysis. In Conference Record of the
38th Asilomar Conference on Signals, Systems, and
Computers, volume 1, pages 562–566. IEEE Signal
Processing Society.
Ko, J.-G., Gil, Y.-H., Yoo, J.-H., and Chung, K.-I. (2007).
A novel and efficient feature extraction method for iris
recognition. ETRI Journal, 29(3):399 – 401.
Ma, L., Tan, T., Wang, Y., and Zhang, D. (2004). Efficient
iris recognition by characterizing key local variations.
IEEE Transactions on Image Processing, 13:739–750.
Zhu, Y., Tan, T., and Wang, Y. (2000). Biometric personal
identification based on iris patterns. In Proceedings of
the 15th International Conference on Pattern Recog-
nition (ICPR’00), volume 2, pages 2801–2804. IEEE
Computer Society.
ROTATION-INVARIANT IRIS RECOGNITION - Boosting 1D Spatial-Domain Signatures to 2D
235
