
GOAL-BASED ADVERSARIAL SEARCH
Searching Game Trees in Complex Domains using Goal-based Heuristic
Viliam Lis
´
y, Branislav Bo
ˇ
sansk
´
y, Michal Jakob and Michal P
ˇ
echou
ˇ
cek
Agent Technology Center, Department of Cybernetics, Faculty of Electrical Engineering
Czech Technical University in Prague, Czech Republic
Keywords:
Game tree search, Adversarial planning, Goals, Background knowledge, Complex domain.
Abstract:
We present a novel approach to reducing adversarial search space by using background knowledge represented
in the form of higher-level goals that players tend to pursue in the game. The algorithm is derived from a
simultaneous-move modification of the max
n
algorithm by only searching the branches of the game tree that
are consistent with pursuing player’s goals. The algorithm has been tested on a real-world-based scenario
modelled as a large-scale asymmetric game. The experimental results obtained indicate the ability of the goal-
based heuristic to reduce the search space to a manageable level even in complex domains while maintaining
the high quality of resulting strategies.
1 INTRODUCTION
Recently, there has been a growing interest in study-
ing complex systems in which large numbers of
agents concurrently pursue their goals while engag-
ing in complicated patterns of mutual interaction. Ex-
amples include real-world systems, such as various
information and communication networks or social
networking applications as well as simulations, in-
cluding models of societies, economies and/or war-
fare. Because in most such systems the agents are
part of a single shared environment, situations arise in
which their actions and strategies interact. Such situ-
ations, in which the outcome of agent’s actions de-
pends on actions chosen by others, are often termed
games and have been an interest of AI research from
its very beginning. With the increasing complexity of
the environments in which the agents interact, how-
ever, classical game playing algorithms, such as mini-
max search, become unusable due to the huge branch-
ing factor, size of the state space, continuous time and
space, and other factors.
In this paper, we present a novel game tree search
algorithm adapted and extended for use in large-scale
multi-player games with asymmetric objectives (non-
zero-sum games). The basis of the proposed algo-
rithm is the max
n
algorithm (Luckhardt and K.B.Irani,
1986) generalized to simultaneous moves. The main
contribution, however, lies in a novel way in which
background knowledge about possible player’s goals
and the conditions under which they are adopted is
represented and utilized in order to reduce the extent
of game tree search. The background knowledge con-
tains:
• Goals corresponding to basic objectives in the
game (goals represent elementary building blocks
of player’s strategies); each goal is associated with
an algorithm which decomposes it into a sequence
of actions leading to its fulfilment.
• Conditions defining world states in which pursu-
ing the goals is meaningful (optionally, represent-
ing conditions defining when individual players
might pursue the goals).
• Evaluation function assigning to each player and
world state a numeric value representing desir-
ability of the game state for the player (e.g. utility
of the state for the player).
The overall background knowledge utilized in the
search can be split into a player-independent part (also
termed domain knowledge) and a player-specific part
(further termed opponent models).
The proposed approach builds on the assumption
that strategies of the players in the game are com-
posed from higher-level goals rather than from ar-
bitrary sequences of low-level actions. Adapted in
game tree search, this assumption brings considerably
smaller game trees, because it allows evaluating only
those branches of low-level actions that lead to reach-
ing some higher-level goal. However, as with almost
53
Lisý V., Bošanský B., Jakob M. and P
ˇ
echou
ˇ
cek M. (2009).
GOAL-BASED ADVERSARIAL SEARCH - Searching Game Trees in Complex Domains using Goal-based Heuristic.
In Proceedings of the International Conference on Agents and Artificial Intelligence, pages 53-60
DOI: 10.5220/0001659900530060
Copyright
c
SciTePress

any kind of heuristics, the reduction in computational
complexity can potentially decrease the quality of re-
sulting strategies, and this fundamental trade-off is
therefore an important part of algorithm’s evaluation
described further in the paper.
The next section introduces the challenges that
complicate using game-tree search in complex do-
mains. Section 3 describes the proposed algorithm
designed to address them. Search space reduction,
precision loss and scalability of the algorithm are ex-
perimentally examined in Section 4. Section 5 re-
views the related work and the paper ends with con-
clusions and discussion of future research.
2 CHALLENGES
The complex domains of our interest include real-
world domains like network security or military op-
erations. We use the later for intuition in this sec-
tion. The games appearing there are often n-player
non-zero-sum games with several conceptual prob-
lems that generally prohibit using classic game-tree
search algorithms, such as max
n
.
• Huge branching factor (BF) – In contrast to
many classical games, in military operations the
player assign actions simultaneously to all units
it controls. Together with a higher number of ac-
tions (including parameters) which the units can
perform, this results in branching factors several
magnitudes bigger than in games such as Chess
(BF ≈ 35) or Go (BF ≈ 361).
• Importance of long plans – In many realis-
tic scenarios, long sequence of atomic actions is
needed before a significant change to the state of
world/game is produced. A standard game tree
in such scenarios needs to use a correspondingly
high search depth, further aggravating the effect
of huge branching factor mentioned earlier.
Let us emphasis also the advantages that using
game tree search can bring. If we successfully over-
come the mentioned problems, we can reuse the large
amount of research in this area and further enhance
the searching algorithm with many of existing ex-
tensions (such as use of various opponent models,
probabilistic extensions, transposition tables, or other
shown e.g. in (Schaeffer, 1989)).
3 GOAL-BASED GAME-TREE
SEARCH
In this section, we present the Goal-based Game-tree
Search algorithm (denoted as GB-GTS) developed for
game playing in the complex scenarios and address-
ing the listed challenges. We describe the problems of
simultaneous moves, present our definition of goals,
and then follow with a description of the algorithm
and how it can be employed in a game-playing agent.
3.1 Domain
The domains supported by the algorithm can be
formalized as a tuple (P , U, A, W , T ), where P
is the set of players, U =
S
p∈P
U
p
is a set of
units/resources capable of performing actions in the
world, each belonging to one of the players. A =
u∈U
A
u
is a set of combinations of actions the units can
perform, W is the set of possible world states and
T : W × A → W is the transition function realiz-
ing one move of the game where the game world is
changed via actions of all units and world’s own dy-
namics.
The game proceeds in moves in which each player
assign actions to all the units it controls (forming the
action of the player) and the function T is called with
joint action of all players’ action to change the world
state.
3.2 Simultaneous Moves
There are two options for dealing with simultaneous
moves. The first one is to directly work with joint ac-
tions of all players in each move, compute their val-
ues and consider the game matrix (normal form game)
they create. The actions of individual players can then
be chosen based on a game-theoretical equilibrium
(e.g. Nash equilibrium in (Sailer et al., 2007)). The
second option is to fix the order of the players and let
them choose their actions separately in the same way
as in max
n
, but using the unchanged world state from
the end of the previous move for all of them and with
the actions’ execution delayed until all players have
chosen their actions. This method is called delayed
execution in (Kovarsky and Buro, 2005). In our exper-
iments, we have used the approach with fixed players’
order, because of easier implementation and to focus
the research on usage of backgroung knowledge.
3.3 Goals
For our algorithm we define a goal as a pair (I
g
, A
g
),
where I
g
(W , U) is the initiation condition of the goal
ICAART 2009 - International Conference on Agents and Artificial Intelligence
54

and A
g
is an algorithm that, depending on its internal
state and the current state of the world, deterministi-
cally outputs the next action that leads to fulfilling the
goal.
A goal can be assigned to one unit and it is then
pursued until it is successfully reached or dropped,
because its pursuit is no longer practical. Note, that
we do not specify any dropping or succeeding condi-
tion, as they are implicitly captured in A
g
algorithm.
We allow the goal to be abandoned only if A
g
is fin-
ished, and each unit can pursue only one goal at a
time. There are no restriction on complexity of algo-
rithm A
g
, so this kind of goals can represent any goal
from the taxonomy of goals presented in (van Riems-
dijk et al., 2008) and any kind of architecture (e.g.
BDI, HTN) can be used to describe it.
The goals in GB-GTS serve as building blocks
for more complex strategies that are created by com-
bining different goals for different units and then ex-
plored via search. It is in contrast with the HTN-based
approaches used for guiding the game tree search (see
Section 5), where the whole strategies are encoded us-
ing decompositions from the highest levels of abstrac-
tion to the lower ones.
3.4 Algorithm Description
The main procedure of the algorithm (sketched in Fig-
ure 1 as procedure GBSearch()) recursively computes
the value of a state for each of the players assuming
that all the units will rationally optimize the utility of
the players controlling them. The inputs to the pro-
cedure are the world state for which the value is to
be computed, the depth to which to search from the
world state and the goals the units are currently pur-
suing. The last parameter is empty when the function
is called for the first time.
The algorithm is composed of two parts. The first
is the simulation of the world changes based on the
world dynamics and the goals that are assigned to
the units, and the second is branching on all possi-
ble goals that a unit can pursue after it is finished with
its previous goal.
The first part - simulation - consists of lines 1 to
15. If all the units have a goal they actively pursue, the
activity in the world is simulated without any need for
branching. The simulation runs in moves and lines 3-
10 describe the simulation of a single move. At first,
for each unit an action is generated based on the goal
g assigned to this unit (line 5). If the goal related algo-
rithm A
g
is finished, we remove the goal from the map
of goals (lines 6-8) and the unit, that was assigned to
this goals, becomes idle. The generated actions are
then executed and the conflicting changes of the world
Input: W ∈ W : current world state, d: search depth,
G[U]: map from units to goals they pursue
Output: an array of values of the world state (one
value for each player)
curW = W1
while all units have goals in G do2
Actions =
/
03
foreach goal g in G do4
Actions = Actions ∪ NextAction(A
g
)5
if A
g
is finished then6
remove g from G7
end8
end9
curW = T (curW ,Actions)10
d = d − 111
if d=0 then12
return Evaluate(curW)13
end14
end15
u = GetFirstUnitWithoutGoal(G)16
foreach goal g with satisfied I
g
(curW , u) do17
G[u] = g18
V [g] = GBSearch(curW, d,Copy(G))19
end20
g = argmax
g
V [g][Owner(u)]21
return V [g]22
Figure 1: GBSearch(W , d, G) - the main procedure of GB-
GTS algorithm.
are resolved in accordance with game rules (line 10).
After this step, one move of the simulation is finished.
If the simulation has reached the required depth of
search, the resulting state of the world is evaluated
using the evaluation functions of all players (line 13).
The second part of the algorithm - branching -
starts when the simulation reaches the point where
at least one unit has finished pursuing its goal (lines
16-22). In order to assure the fixed order of players
(see Section 3.2), the next processed unit is chosen
from the idle units based on the ordering of the play-
ers that control the units (line 16). In the run of the
algorithm, all idle units of one player are considered
before moving to the units of the next one. The rest
of the procedure deals with the selected unit. For this
unit, the algorithm sequentially assigns each of the
goals that are applicable for the unit in the current
situation. The applicability is given by the I
g
con-
dition of the goal. For each applicable goal, it assigns
the goal to the unit and evaluates the value of the as-
signment by recursively calling the whole GBSearch()
procedure (line 19). The current goals are cloned, be-
cause the state of the already started algorithms for
the rest of the units (A
g
) must be preserved. After
computing the value of each goal assignment, the one
that maximizes the utility of the owner of the unit is
chosen (line 21) and the values of this decision for all
GOAL-BASED ADVERSARIAL SEARCH - Searching Game Trees in Complex Domains using Goal-based Heuristic
55

players are returned by the procedure.
3.5 Game Playing
The pseudo-code on Figure 1 shows only the compu-
tation of the values of the decisions and does not deal
with how to actually use it to determine player’s ac-
tion in the game. In order to do so, a player needs to
extract a set of goals for its units from the searched
game-tree. Each node in the search procedure execu-
tion tree is associated with a unit – the unit for which
the goals are tried out. During the run of the algo-
rithm, we store the maximizing goal choices from the
top of the search tree representing the first move of
the game. The stored goals for each idle unit of the
searching player are the main output of the search.
In general, there are two possibilities how to
use proposed goal-based search algorithm in game-
playing.
The first approach lies in starting the algorithm in
each move and with all the units in the simulation set
to idle. The resulting goals are extracted and the first
action is generated for each of the goals and that are
the actions played in the game. Such an approach is
better for coping with unexpected events and it should
be beneficial if the background knowledge does not
exactly describe the activities in the game.
In the second approach the player, that uses the al-
gorithm, keeps the current goal for each of the units
it controls. If none of its units is idle, it just uses the
goals to generate actions for its units. Otherwise, the
search algorithm is started with the goals for the non-
idle units controlled by the player pre-set and all the
other units idle. The resulting goals for the searching
player’s units that were idle are used and pursued in
next moves. This approach is much less computation-
ally intensive.
3.6 Opponent Models
The search algorithm introduced in this section is
very suitable for the use of opponent models, that are
proved to be useful in adversarial search in (Carmel
and Markovitch, 1996). There are two kinds of oppo-
nent model present in the algorithm. One is already
an essential part of the max
n
algorithm. It is the set
of evaluation functions capturing basic preferences of
each opponent.
The other opponent model can be used to reduce
the set of all applicable goals (iterated in Figure 1 on
lines 18-21) to the goals a particular player is likely
to pursue. This can be done by adding player-specific
constrains to conditions I
g
defining when the respec-
tive goal is applicable. These constrains can be hand-
coded by an expert or learned from experience; we
call them goal-restricting opponent models.
It can be illustrated on a simple example of the
goal representing loading a commodity to a truck.
The domain restriction I
g
could be that the truck must
not be full. The additional constrain could be that the
commodity must be produced locally at the location,
because the particular opponent never uses temporary
storage locations for the commodity and always trans-
ports it from the place where it is produced to the
place where it is consumed.
Using a suitable goal-restricting opponent model
can further reduce the size of the space that needs to
be searched by the algorithm.
A similar way of pruning is possible also in ad-
versarial search without goals, but we believe, that
assessing what goals would a player pursue in a sit-
uation is more intuitive and easier to learn than which
basic action (e.g. going right or left on a crossroad) a
player will execute.
4 EXPERIMENTS
In order to practically examine proposed goal-based
(GB) search algorithm we performed several exper-
iments. Firstly, we compare it to exhaustive search
performed by the simultaneous move modification of
max
n
that we call action-based (AB) search and we
assess the ability to reduce the volume of search on
one side and maintain the quality of resulting strate-
gies on the other. Then we analyze scalability of GB
algorithm in more complex scenarios. Note that we
use the worst-case scenario in the experiments. All
units are choosing their goals at the same moment.
This does not happen often if we use the lazy ap-
proach which only assigns actions to units that be-
come idle (see Section 3.5).
4.1 Example Game
The story behind the game we use as a test case for our
algorithm is a humanitarian relief operation in an un-
stable environment, with three players - government,
humanitarian organization, and separatists. Each of
the players controls a number of units with different
capabilities that are placed in the game world repre-
sented by a graph. Any number of units can be lo-
cated in each vertex of the graph and change its posi-
tion to an adjacent vertex in one game move. Some of
the vertices of the graph contain cities, that can take
in commodities the players use to construct buildings
and produce other commodities.
ICAART 2009 - International Conference on Agents and Artificial Intelligence
56

Figure 2: A schema of the simple scenario. Black vertices
represent cities that can be controlled by players, grey ver-
tices represent cities that cannot be controlled, and white
vertices do not contain cities.
The utilities (evaluation functions) representing
the main objectives of the players are generally
weighted sums of components, such as the number
of cities with sufficient food supply, or the number of
cities under the control of government. The govern-
ment control is derived from the state of the infras-
tructure, the difference between the number of units
of individual players in the city and the state of the
control of the city in the previous move.
The goals, used in the algorithm, are generated by
instantiation of fifteen goal types. Each goal type is
represented as a Java class. Only four of the fifteen
classes are unique and the rest nine classes are derived
form four generic classes in a very simple way. The
actions leading towards achieving a goal consist typ-
ically of path-finding to a specific vertex, waiting for
a condition to hold, performing a specific action (e.g.
loading/unloading commodities), or their concatena-
tion. The most complex goal is escorting a truck by
cop that consists of estimating a proper meeting point,
path planing to that point, waiting for the truck, and
accompanying it to its destination.
Simple Scenario: In order to run the classical AB
algorithm on a game of this complexity, the scenario
has to be scaled down to a quite simple problem. We
have created such simplified scenario as a subset of
our game. It is shown in Figure 2 and the main char-
acteristics are explained here:
• only two cities can be controlled (Vertices 3 and 6)
• a government’s HQ is built in Vertex 3
• two “main” units - police (cop) and gangster (gng)
are placed in Vertex 3
• a truck is transporting explosives from Vertex 5 to
Vertex 7
• another two trucks are transporting food from Ver-
tex 1 to the city with food shortage Vertex 3
There are several possible runs of this scenario.
The police unit has to protect several possible threats.
In order to make government to lose control in Ver-
tex 3, the gangster can either destroy food from a
10
1
10
2
10
3
10
4
10
5
10
6
10
7
10
8
0 2 4 6 8 10 12 14 16 18 20
Nodes
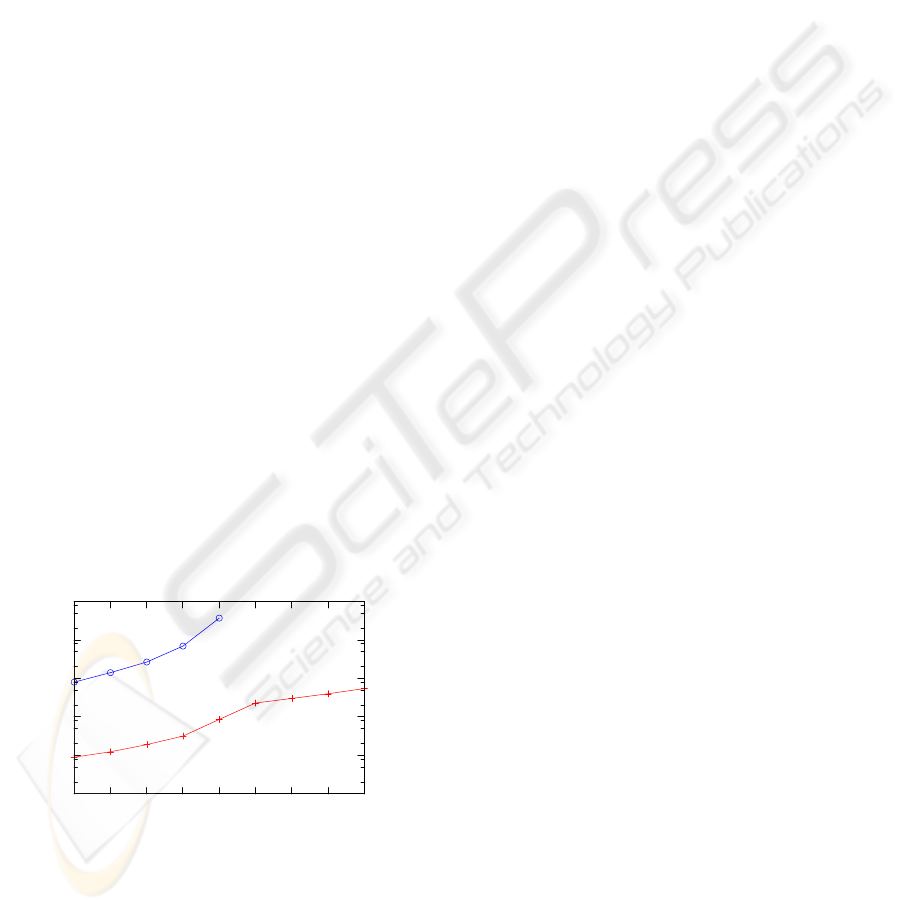
Search Depth
Figure 3: The search space reduction of the GB algorithm
(pluses) compared to the AB algorithm (circles). An aver-
age number (over all 450 test problems) of the search tree
nodes explored depending on the search depth is shown for
both algorithms in a logarithmic scale.
truck to cause starving resulting in lowering the well-
being and consequent destroying of the HQ (by riots),
or it can steal explosives and build a suicide bomber
that will destroy the HQ without reducing wellbeing
in the city. Finally, it also can try to gain control in
city in Vertex 6 just by outnumbering the police there.
In order to explore all these options, the search depth
necessary is six moves.
Even such a small scenario creates too big a game
tree for the AB algorithm. Five units with around four
applicable actions each (depending on the state of
the world) considered in six consequent moves makes
(4
5
)
6
≈ 10
18
world states to examine. Hence, we fur-
ther simplify it for this algorithm. Only the actions of
two units (cop and gng) are actually explored in the
AB search and the actions of the trucks are consid-
ered to be a part of the environment (i.e. the trucks
are scripted to act rationally in this scenario). Note
that GB algorithm does not need this simplification
and actions of all units are explored in GB algorithm.
4.2 Search Reduction
Using this simplified scenario we firstly analyze how
the main objective of the algorithm – search space
reduction – is satisfied.
We run the GB and AB algorithms on a fixed set of
450 problems – world states samples extracted from
30 different traces of the game and we increased the
look-ahead for both algorithm. As we can see in Fig-
ure 3, the experimental results fulfilled our expec-
tations of substantial reduction of the search space.
The number of nodes explored increases exponen-
tially with the depth of the search. However, the base
of the exponential is much lower for the GB algo-
rithm. The size of the AB tree for six moves look-
ahead is over 27 million, while GB search with the
same look-ahead explores only 208 nodes and even
GOAL-BASED ADVERSARIAL SEARCH - Searching Game Trees in Complex Domains using Goal-based Heuristic
57

for look-ahead of nineteen, the size of the tree was in
average less than 2×10
5
. These numbers indicate that
using heuristic background knowledge can reduce the
time needed to choose an action in the game from tens
of minutes to a fraction of second.
Our implementations of each of the algorithms
processed approximately twenty five thousands nodes
per second on our testing hardware without any opti-
mization techniques. However, according to (Billings
et al., 2004), game trees with million nodes can be
searched in real-time (about one second) when such
an optimization is applied and when efficient data
structures are used.
4.3 Loss of Accuracy
With such substantial reduction of the set of possi-
ble courses of action explored in the game, some loss
of quality of game-playing can be expected. Using
the simplified scenario, we compared the actions re-
sulting from the AB and the first action generated by
the goal resulting from the GB algorithm. The ac-
tion differed in 47% of cases. However a different
action does not necessarily mean that the GB search
has found a sub-optimal move. Two different actions
often have the same value in AB search. Because of
the possibly different order in which actions are con-
sidered, the GB algorithm can output an action which
is different from the AB output yet still has the same
optimal value. The values of actions referred to in the
next paragraph all come from the AB algorithm.
The value of the action resulting from GB algo-
rithm was in 88.1% of cases exactly the same as the
“optimal” value resulting from AB algorithm. If the
action chosen by GB algorithm was different, it was
still often close to the optimal value. We were mea-
suring the difference between the values of GB and
optimal actions, relative to the difference between the
maximal and the minimal value resulting from the
searching players decisions in the first move in the
AB search. The mean relative loss of the GB algo-
rithm was 9.4% of the range. In some cases, the GB
algorithm has chosen the action with minimal value,
but it was only in situations, where the absolute dif-
ference between the utilities of the options was small.
4.4 Scalability
Previous sections show that the GB algorithm can be
much faster than and almost as accurate as the AB al-
gorithm with suitable goals. We continue with assess-
ing the limits on the complexity of the scenario where
GB algorithm is still usable. There are several possi-
ble expansions of the simple scenario. We explore the
most relevant factor – number of units – separately
and then we apply the GB algorithm on a bigger sce-
nario. In all experiments, we ran the GB algorithm
in the initial position of the extended simple scenario
and we measured the size of the searched part of the
game tree.
4.4.1 Adding Units
10
2
10
3
10
4
10
5
10
6
10
7
1 2 3 4 5 6 7 8 9 10
Nodes
Units Added
Figure 4: Increase of the size of the searched tree when
adding one to ten police units (pluses) and explosives trucks
(circles) to the simple scenario with 6 move look-ahead.
The increase of the size of the searched tree natu-
rally depends on the average number of goals applica-
ble for a unit when it becomes idle and the lengths of
the plans that lead to their fulfillment. The explosives
truck has usually only a couple of applicable goals. If
it is empty, the goal is to load in one of the few cities
where explosives are produced and if it is full, the goal
is unloading somewhere where explosives can be con-
sumed. On the other hand, a police unit has a lot of
possible goals. It can protect any transport from being
robbed and it can try to outnumber the separatists in
any city. We were adding these two unit types to the
simple scenario and computed size of the search tree
with fixed six moves look-ahead.
When adding one to ten explosives trucks to the
simple scenario, each of them has always only one
goal to pursue at any moment. Due to our GB algo-
rithm definition, where goals for each unit are evalu-
ated in different search tree node, even adding a unit
with only one possible goal increases the number of
evaluated nodes slightly. In Figure 4 are the results
for this experiment depicted as circles. The number
of the evaluated nodes increases only linearly with in-
creasing the number of the trucks.
Adding further police units with four goals each
to the simple scenario increased the tree size expo-
nentially. The results for this experiment are shown
in Figure 4 as pluses.
ICAART 2009 - International Conference on Agents and Artificial Intelligence
58
4.4.2 Complex Scenario
In order to test usability of GB search on more re-
alistic setting, we implemented a larger scenario of
our game. We used a graph with 2574 vertices and
two sets of units. The first was composed of nine
units, including two police units with up to four pos-
sible goals in one moment, two gangster units with up
to four possible goals, an engineer with three goals,
stone truck with up to two goals and three trucks with
only one commodity source and one meaningful des-
tination resulting to one goal at any moment. The sec-
ond included seven units – one police, one gangster
unit and the same amount of units of the other types.
The lengths of the plans to reach these goals is ap-
proximately seven basic actions. There are five cities,
where the game is played.
A mayor difference of this scenario to the simple
scenario is, besides the added units, a much bigger
game graph and hence higher lengths of the routes
between cities. As a result, all the plans of the units
that need to arrive to a city and perform some actions
there are proportionally prolonged. This is not a prob-
lem for the GB algorithm, because the move actions
along the route are just simulated in the simulation
phase and do not cause any extra branching.
In a simple experiment to prove this, we changed
the time scale of the simulation, so that all the actions
were split to two sub-actions performing together the
same change of the game world. After this modifica-
tion, GB algorithm explored exactly the same num-
ber of nodes and the time needed for the computation
increased linearly, corresponding to more simulation
steps needed.
10
3
10
4
10
5
10
6
10
7
10
8
10 11 12 13 14 15 16 17 18
Nodes
Search Depth
Figure 5: Size of the trees searched by GB algorithm in the
complex scenario with 7 (pluses) and 9 (circles) units.
If we assume, that the optimized version of the
algorithm can compute one million nodes in a rea-
sonable time, than the look-ahead we can use in the
complex scenario is 10 in the nine units case and 18
in the seven units case. Both values are higher than
the average length of a plan of a unit so the algorithm
plays meaningfully. If we wanted to apply the AB al-
gorithm to the seven unit case with look-ahead eigh-
teen, considering only four possible move directions
and waiting for each unit, it would mean searching
through approximately 4
7
18
≈ 10
75
nodes of the game
tree, which is nowadays clearly impossible.
5 RELATED WORK
The idea to use domain knowledge in order to re-
duce the portion of the game tree that is searched dur-
ing the play has already appeared in literature. The
best-known example is probably (Smith et al., 1998),
where authors used HTN formalism to define the set
of runs of the game, that are consistent with some pre-
defined hand-coded strategies. During game playing,
they search only that part of the game tree.
A plan library represented as HTN is used to play
GO in (Willmott et al., 2001). The searching player
simulates HTN planning for both the players, without
considering what is the other one trying to achieve. If
one player achieves its goal, the opponent backtracks
(the shared state of the world is returned to a previous
state) and tries an other decomposition.
Both these works use quite detailed descriptions
of the whole space of the meaningful strategies in
HTN. Another approach for reducing the portion of
the tree that is searched for scenarios with multiple
units is introduced in (Mock, 2002). The authors
show successful experiments with searching just for
one unit at a time, while simulating the movements of
the other units using rule-based heuristic.
An alternative to using the game-tree search is
summarized in (Stilman et al., 2007). They solve
large scale problems with multiple units using, be-
sides other methods, generation of the meaningful
sequences of unit actions pruned according to vari-
ous criteria. One of them is whether they can be in-
tercepted (rendered useless or counterproductive) by
traces of the opponent’s units.
6 CONCLUSIONS
We proposed a novel approach to introducing
background knowledge heuristic to multi-player
simultaneous-move adversarial search. The approach
is particularly useful in domains where long se-
quences of actions lead to significant changes in the
world state, each of the units (or other resources) can
only pursue a few goals at any time and the decompo-
sition of a each goal to low level actions is uniquely
GOAL-BASED ADVERSARIAL SEARCH - Searching Game Trees in Complex Domains using Goal-based Heuristic
59

defined (e.g. using the shortest path to move between
locations).
We have compared the performance of the algo-
rithm to a slightly modified exhaustive max
n
search,
showing that despite examining only a small fraction
of the game tree (less than 0.001% for the look-ahead
of six game moves), the goal-based search is still
able to find an optimal solution in 88.1% cases; fur-
thermore, even the suboptimal solutions produced are
very close to the optimum. This results have been ob-
tained with the background knowledge designed be-
fore implementing and evaluating the algorithm and
without further optimization to prevent over-fitting.
Furthermore, we have tested the scalability of
the algorithm to larger scenarios where the modified
max
n
search cannot be applied. We have confirmed
that although the algorithm cannot overcome the ex-
ponential growth, this growth controllable by reduc-
ing the number of different goals a unit can pursue
and by making the action sequences generated by
goals longer. Simulations on a real-world scenario
modelled as an multi-player asymmetric game proved
the approach viable, though further optimizations
and more improved background knowledge would be
needed for the algorithm to discover complex strate-
gies.
An important feature of the proposed approach
is its compatibility with all existing extensions of
general-sum game tree search based on modified
value back-up procedure and other optimizations. It
is also insensitive to the granularity of space and time
with which a game is modelled as long as the structure
of the goals remains the same and their decomposition
into low-level actions is scaled correspondingly.
In future research, we aim to implement additional
technical improvements in order to make the goal-
based search applicable to even larger problems. In
addition, we would like to address the problem of
the automatic extraction of goal-based background
knowledge from game histories. First, we will learn
goal initiation conditions for individual players and
use them for additional search space pruning. Sec-
ond, we will address a more challenging problem of
learning the goal decomposition algorithms.
ACKNOWLEDGEMENTS
Effort sponsored by the Air Force Office of
Scientific Research, USAF, under grant number
FA8655-07-1-3083 and by the Research Programme
No.MSM6840770038 by the Ministry of Education of
the Czech Republic. The U.S. Government is autho-
rized to reproduce and distribute reprints for Govern-
ment purpose notwithstanding any copyright notation
thereon.
REFERENCES
Billings, D., Davidson, A., Schauenberg, T., Burch, N.,
Bowling, M., Holte, R. C., Schaeffer, J., and Szafron,
D. (2004). Game-tree search with adaptation in
stochastic imperfect-information games. In van den
Herik, H. J., Bjrnsson, Y., and Netanyahu, N. S., edi-
tors, Computers and Games, volume 3846 of Lecture
Notes in Computer Science, pages 21–34. Springer.
Carmel, D. and Markovitch, S. (1996). Learning and us-
ing opponent models in adversary search. Technical
Report CIS9609, Technion.
Kovarsky, A. and Buro, M. (2005). Heuristic search applied
to abstract combat games. In Canadian Conference on
AI, pages 66–78.
Luckhardt, C. and K.B.Irani (1986). An algorithmic solu-
tion of n-person games. In Proc. of the National Con-
ference on Artificial Intelligence (AAAI-86), Philadel-
phia, Pa., August, pages 158–162.
Mock, K. J. (2002). Hierarchical heuristic search techniques
for empire-based games. In IC-AI, pages 643–648.
Sailer, F., Buro, M., and Lanctot, M. (2007). Adversarial
planning through strategy simulation. In IEEE Sym-
posium on Computational Intelligence and Games
(CIG), pages 80–87, Honolulu.
Schaeffer, J. (1989). The history heuristic and alpha-
beta search enhancements in practice. IEEE Trans-
actions on Pattern Analysis and Machine Intelligence,
11(11):1203–1212.
Smith, S. J. J., Nau, D. S., and Throop, T. A. (1998). Com-
puter bridge - a big win for AI planning. AI Magazine,
19(2):93–106.
Stilman, B., Yakhnis, V., and Umanskiy, O. (2007). Ad-
versarial Reasoning: Computational Approaches to
Reading the Opponent’s Mind, chapter 3.3. Strategies
in Large Scale Problems, pages 251–285. Chapman
& Hall/CRC.
van Riemsdijk, M. B., Dastani, M., and Winikoff, M.
(2008). Goals in agent systems: A unifying frame-
work. In Padgham, Parkes, Mller, and Parsons, ed-
itors, Proc. of 7th Int. Conf. on Autonomous Agents
and Multiagent Systems (AAMAS 2008), volume Es-
toril, Portugal, pages 713–720.
Willmott, S., Richardson, J., Bundy, A., and Levine, J.
(2001). Applying adversarial planning techniques to
Go. Theoretical Computer Science, 252(1–2):45–82.
ICAART 2009 - International Conference on Agents and Artificial Intelligence
60
