
HYBRID AGENT & COMPONENT-BASED MANAGEMENT OF
BACKCHANNELS
M. Dragone, G. M. P. O’Hare
CLARITY Centre for Sensor Web Techologies, University College Dublin, Belfield, Dublin 4, Ireland
D. Lillis, R. W. Collier
School of Computer Science and Informatics, University College Dublin, Belfield, Dublin 4, Ireland
Keywords:
Agent-oriented software engineering, Component based software engineering, Multi-agent systems.
Abstract:
This paper describes the use of the SoSAA software framework to implement the hybrid management of
communication channels (backchannels) across a distributed software system. SoSAA is a new integrated
architectural solution enabling context-aware, open and adaptive software while preserving system modu-
larity and promoting the re-use of existing component-based and agent-oriented frameworks and associated
methodologies. In particular, we show how SoSAA can be used to orchestrate the adoption of network adapter
components to bind functional components that are distributed across different component contexts. Both the
performance of the different computational nodes involved and the efficiencies and faults in the underlying
transport layers are taken into account when deciding which transport mechanisms to use.
1 INTRODUCTION
Agent-Oriented Software Engineering (AOSE) is
viewed as a general-purpose paradigm advocating the
engineering of complex distributed software applica-
tions as Multi Agent Systems (MASs), i.e. loosely-
coupled, autonomous, situated and social agents. For
example, agents can be instrumental in confronting
the high degree of variability and dynamicity in mod-
ern pervasive computing applications.
The idea that MAS features, such as goal-based
reasoning, standardized agent communication lan-
guages (ACL) and associated protocols, can support
flexible and adaptive management of system distribu-
tion over multiple and potentially heterogeneous com-
putational nodes, was first proposed for RETSINA
(Sycara et al., 2003), whose hybrid communication
style provides ACL-level, implementation-agnostic
specifications of the coordination activities necessary
to orchestrate secondary (non-ACL) communication
channels (backchannels).
To aid the development of systems that address
context-aware, open and adaptive software while pre-
serving system modularity and promoting the re-use
of existing frameworks and methodologies, we have
proposed the Socially Situated Agent Architecture
(SoSAA) (Dragone, 2007; Dragone et al., 2009).
SoSAA builds on both Component Based Soft-
ware Engineering (CBSE) and AOSE to provide a
complete construction process with its associated
software framework. The key focus is on the inter-
action between the component and agent layers of
the framework. In this paper we briefly summarise
the most important characteristics of SoSAA and de-
scribe its application to ground RETSINA-style spec-
ifications by providing a set of concrete operators
and by defining a simple but extendable service for
backchannel management.
2 AGENT-BASED
BACKCHANNEL
MANAGEMENT
The ability to combine different communication
mechanisms is an important feature requirement in
order to support system’s adaptation in modern dis-
tributed and heterogeneous software systems. Often,
the differences between the type of data exchanged
within a single application (e.g. in terms of con-
tent, rates and bandwidth requirements) cannot be
153
Dragone M., M. P. O’Hare G., Lillis D. and W. Collier R. (2009).
HYBRID AGENT & COMPONENT-BASED MANAGEMENT OF BACKCHANNELS.
In Proceedings of the 4th International Conference on Software and Data Technologies, pages 153-158
DOI: 10.5220/0002259901530158
Copyright
c
SciTePress

handled by a single toolkit or communication mech-
anism. For example, one system may need to com-
bine CORBA communication mechanisms with mid-
dleware that specifically addresses the distribution of
media data (e.g. video/sound), or combine data dis-
covery mechanisms, e.g. based upon data dissemina-
tion techniques such as multicast, with point-to-point
agent communication systems. All these communi-
cation mechanisms provide dedicated and optimum
solutions to specific problems or provide access to a
large base of associated tools and libraries and should
be integrated for opportunistically satisfying all the
systems needs and constraints.
Supporting ubiquitous and mobile systems adds
an element of dynamicity that is also difficult to han-
dle. Contrary to static and offline integration scenar-
ios, where all the communication links can be pre-
configured, in open / ubiquitous environments, the
different elements are dynamically distributed. This
makes it vital to be able to alter communication path-
ways at run-time, e.g. by contacting different servers
while the user moves within a ubiquitous infrastruc-
ture or interacting on-demand through portable and/or
wearable devices that can be characterized by differ-
ent computational, network and presentation capabil-
ities. In these cases using multiple communication
mechanisms may be instrumental in guaranteeing the
adaptability of the system to such an environment.
However, in addition to the complexity of manag-
ing distinct data-exchange formats, combining multi-
ple communication mechanisms also adds the over-
head of managing their their relationships, for exam-
ple, to guarantee some global policies, such as poli-
cies for security or resource management. For in-
stance, it might be appropriate for all the mechanisms
employed to respect some high-level run-time policy
dictated by a specific application. For example, in
tele-conferencing systems, session termination may
require the closure of all the single connections that
were established in the process. In general, limited
resources in terms of memory, network bandwidth,
CPU, etc, often posits a conservative approach con-
sisting of shutting down unused modules and gener-
ally releasing resources after use is usually preferable.
Conversely, if one data connection carrying one type
of data terminates prematurely, e.g. for a problem iso-
lated to a specific transport layer, it should be possible
to detect the condition and re-establish the communi-
cation, e.g. to restore a session, or to support more
sophisticated error-recovery procedures.
Such an approach is advocated in the RETSINA
architecture. RETSINA supports the specification (in
an agent communication language such as KQML
or FIPA-ACL) of the conversational policies agents
should adhere to in their interactions and the rel-
evant ontologies for achieving semantic interoper-
ability. Crucially, the ACL-level is used to coordi-
nate multiple heterogeneous communication systems
in order to bind together different functional compo-
nents and support agent-based applications running
under a wide variety of conditions, e.g. different op-
erating systems, devices and programming languages.
This approach results in a two tiered communication
strategy, in which low-level communications, called
backchannels, are represented and coordinated in the
ACL level. However, RETSINA provides only ACL-
level, implementation-agnostic specifications which
can lead to the development of such features.
3 SoSAA
SoSAA incorporates modularity by applying the prin-
ciples of hybrid agent control architectures. Popu-
larised by their use in robotics (e.g. in (Gat, 1992)),
hybrid control architectures are layered architectures
combining low-level behaviour-based systems with
high-level, deliberative reasoning apparatus. From
a control perspective, this enables the delegation of
many of the details of the agent’s control to the be-
haviour system, which closely monitors the agent’s
sensory-motor apparatus without symbolic reasoning.
The original solution advocated by SoSAA is to
apply a hybrid integration strategy to the system’s in-
frastructure, as illustrated in Fig. 1. SoSAA com-
bines a low-level component-based framework with
a MAS-based high-level framework. The low-level
framework operates by imposing clear boundaries be-
tween architectural modules (the components) and
guiding the developers in assembling these compo-
nents into a system architecture. It then provides a
run-time computational environment to the high-level
framework, which then augments it with its multi-
agent organisation, ACL-level interaction, and goal-
oriented reasoning capabilities.
The fundamental motivation behind such an ap-
proach is that application agents in SoSAA do not
just collaborate to carry out the different objectives of
the system, e.g. championing different sub-goals by
attending to different functional requirements. Each
agent is first of all a member of an agent community
inhabiting the same computational environment. As
such, it may be required to compete with the other
agents for the computational resources in the system.
Under this perspective, SoSAA provides a platform
from which these agents can access the system’s re-
sources (e.g. hardware, CPU, data, network), coordi-
nate their activities and resolve possible conflicts aris-
ICSOFT 2009 - 4th International Conference on Software and Data Technologies
154

ing at this level.
A number of widely-used mechanisms in the
CBSE community are supported by SoSAA’s low-
level framework:
• Support for different component collaboration
styles, such as event notification, data messaging
or procedural calls (services).
• Reflection features, which can be used to define
specific component collaborations in terms of pro-
vided (outgoing) and requested (ingoing) inter-
faces.
• Container-type functionalities, used to load, un-
load, activate, de-activate, configure, and query
the set of functional components loaded in the
system.
• Brokering services, which can be used as late-
binding mechanisms by the components to locate
suitable collaboration partners at run-time for ev-
ery collaboration style supported by the frame-
work.
• Binding operations, with which the client-side in-
terfaces (e.g. event listeners, data consumers, ser-
vice clients) of one component can be program-
matically bounded to server-side interfaces (e.g.
event sources, data producers, service providers)
of other components.
• Provision of framework-wide mechanisms, such
as logging, life-cycle management, and schedul-
ing/control injection of process-type components.
Additionally, the high-level framework employs
meta-level sensors and effectors that collectively de-
fine an interface, namely the SoSAA Adapter Service,
that can be used to sense and act upon elements and
mechanisms of the low-level framework by loading,
unloading, configuring and binding components.
The other mechanism adopted for implementing
the SoSAA hybrid strategy is a callback design pat-
tern with which dedicated SoSAA component agents
can collaborate with the low-level framework by mon-
itoring it and by registering themselves as controllers
for specific events. In this manner, these agents are
then able to override the default behaviour of the
mechanisms provided by the low-level infrastructure,
and thus take more informed, context-sensitive deci-
sions. Crucially, while this can be done by taking into
consideration application-specific situations, as both
infrastructure and application-level issues are equally
addressed at the ACL-level, these two levels can now
be confronted by different agents. Instead of over-
loading one agent with both types of concerns, such
an approach enables the definition of distinct agents
Figure 1: SoSAA Hybrid Integration Strategy.
that focus only on certain aspects and that address
conflicts and inter-dependencies at the ACL-level.
Figure 1 illustrates this point by showing the re-
sulting multiagent organization in a typical SoSAA
node. Specifically, the low-level framework provides
the interface for operating both at the application and
at the infrastructure level. Accordingly, depending
on their interests, SoSAA component agents can be
distinguished between application and infrastructure
agents. Such a clear separation is fundamental for
promoting not only the efficiency and the portability
of the resulting systems, but also for separating the
different concerns at design time in order to facilitate
the adoption of a modular development process.
From an integration perspective, the SoSAA hy-
brid approach favors the distinct evolution of the soft-
ware systems it combines, thus more adequately sat-
isfying the requirements for extensibility demanded
of the overall framework. Since the adapter service
is defined in terms of both standard agent capabilities
and a core component model, SoSAA’s design facili-
tates the use of different agent toolkits and component
frameworks. While the former can be programmed
according to different cognitive models, domain and
application-specific issues can be accounted for in the
design of the underlying functional components.
The current instantiation of SoSAA is based on
two open-source toolkits, namely: (1) Agent Fac-
tory (AF) (Collier et al., 2003) is a modular, ex-
tensible, open source framework for the develop-
ment of FIPA-compliant Multi Agent Systems whose
constituent agents are implemented in a purpose-
built Agent-Oriented Programming language known
as AFAPL that supports programming of agents in
HYBRID AGENT & COMPONENT-BASED MANAGEMENT OF BACKCHANNELS
155
terms of beliefs, commitments and goals (Collier and
O’Hare, 2009); and (2) the Java Modular Component
Framework (JMCF), a java-based library developed
in UCD and used to integrate SoSAA with different
component-enabling technologies, such as Java Beans
and OSGi. JMCF comes with a package of built-
in component types and base-class implementations,
each providing (i) component-container functionali-
ties (e.g. loading/unloading/configuration of compo-
nents), (ii) brokering functionalities to register and
find component services, and (iii) support for the run-
time execution of active (process-type) components.
Further details on JMCF can be found in (Dragone
et al., 2009).
4 SoSAA HYBRID
COMMUNICATION
It is relatively easy to satisfy the requirements set on
the SoSAA low-level framework for a single plat-
form, as brokering and container functions can use
inter-process (e.g. memory sharing) communication.
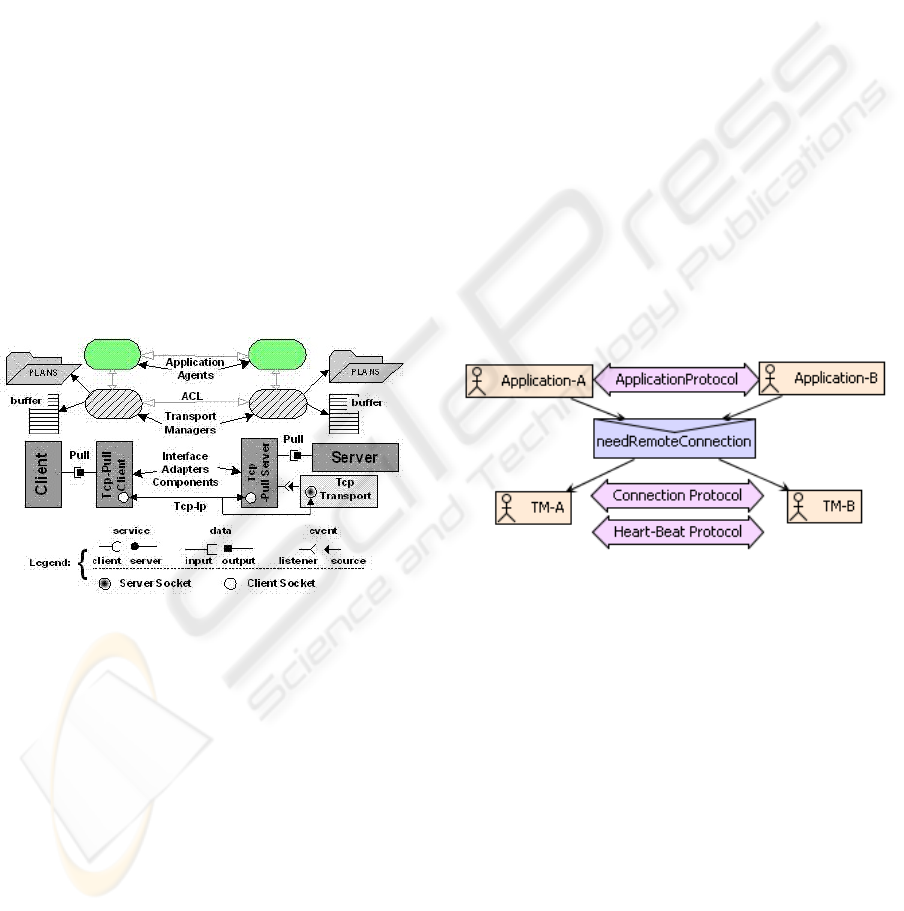
Figure 2: SoSAA Backchannel Management.
Figure 2 helps to illustrate the realisation of the
hybrid backchannel management in SoSAA. Inter-
face adapter components provide the bridge between
the standard interface classes used for inter-process
component collaboration and the backchannels used
to connect the corresponding components’ interfaces
across the network. In the example depicted in Fig-
ure 2, two components (client and server) are re-
motely connected through a Pull data interface. Local
connectivity is resolved by simply assigning, on the
client-side, a reference to a server-side implementa-
tion of the Pull interface, which is defined as a single
pull() method returning a Java Object.
A remote connection between these components
is achieved by interposing a TcpPullServer, which
is bound to the server component exporting the Pull
interface, and a TcpPullClient component, which is
bound to the client component requiring it. Figure
2 also shows how the control of the backchannel is
shared among application component agents and sys-
tem component agents (called transport managers) in
the respective nodes. Specifically, whenever the client
application agent wants one of its components (the
client component in the example) to start exchanging
data with a remote one, it will issue an ACL request to
the remote agent requesting it to find a suitable part-
ner (the server component in the example).
In general, application agents will use application-
specific protocols (e.g. auction based) to agree on
a collaboration between their respective functional
components before delegating the details of the con-
nection to their respective transport managers (see
Figure 3). To reduce the need to negotiate specific
transport mechanisms for each collaboration, each
transport manager uses a heartbeat protocol to in-
troduce themselves to each other. This protocol is
also used to exchange information concerning the ac-
tual transport mechanisms supported by each node,
together with the relevant (transport-specific) details
required to open new connections (e.g. the port for an
TCPIP backchannel).
Figure 3: Interaction Diagram, Application and Transport
Manager Agents.
In order to trade-off the impact of this communi-
cation with the scalability and the ability of the sys-
tem to adapt to dynamic resources, due for instance,
to failures in the underlining transport layers, this in-
formation is then cached by each transport manager.
Each entry in the cache is also supplemented with us-
age statistics, including the total number of interfaces
established toward each collaborating node, their lat-
est throughput, and the last time they were success-
fully (or unsuccessfully) used. Collectively, this in-
formation enables the definition of transport selection
strategies addressing QoS optimization and system’s
adaptation to changing environmental conditions.
The final selection of the respective transport
adapters, their configuration and their wiring to the lo-
cal functional components is coordinated between the
two transport managers through the use of a connec-
ICSOFT 2009 - 4th International Conference on Software and Data Technologies
156

tion dialogue plan called setupRemoteConnection.
Each transport manager activates a copy of this plan,
partially illustrated in Figure 4, as soon as an appli-
cation agent requests the creation of a connection be-
tween a local and a remote component. Each instance
of this plan is then used to keep track of all the in-
termediate steps necessary to create the desired con-
nection, by sending requests to the remote transport
manager, and by mapping incoming requests and re-
sponses to a series of states, captured by sub-goals
and sub-plans that correspond to the dialogues state.
Initially, each transport manager queries (through
the SoSAA Adapter) its local components to find out
if the local interface is a client- or a server-side inter-
face and also to find out the associated Java interface
class (TcpPull in the example in Figure /refFig2). In
the first case, the transport manager adopts the goal
GOAL(clientConnection(<terms>...) while in
the second case the transport manager adopts the goal
GOAL(serverConnection(<terms>...). In both
cases, the terms posted with these goals specify the
name of the components and their interfaces and also
the Java interface class. However, they leave open
any details concerning the specific protocol and the
adapter to be used. These are represented in the goal
as variables to indicate that any possible instantiation
will suffice to satisfy the goal. Further, these goals are
posted as MAINTAIN goals.
Once their role in the new connection has been
established, each transport manager adopts differ-
ent sub-plans to carry out that role. In the exam-
ple depicted in Figure 2, the left-hand agent takes
charge of the client-side connection by driving the
coordination with the the other transport manager.
First of all, the setupClientConnection plan is ex-
ploited, together with the AF plan-selection mecha-
nism, to finally identify a suitable transport mech-
anism. The postcondition of this plan matches
GOAL(clientConnection(...)) while its precon-
dition checks that both platforms can currently han-
dle the same transport protocol (without specifying
it). As such, upon posting the goal the AF reasoning
engine automatically generates a number of possible
options, all committing to the activation of the same
setupClientConnection plan but with different trans-
port protocols specified in their activation arguments.
Conversely, the transport manager in charge
of the server-side interface will activate the
setupRemoteConnection plan, and inform the
client-side manager that it is ready to setup the
connection. Once this message is received, the con-
nection protocol highlighted in figure 4 commences.
The client-side requests the server-side manager
to setup a server adapter for the transport protocol
selected. If nothing has changed since transmitting
its last heartbeat update, the server-side manager
will install the server-side adapter and inform the
client-side manager of the details needed to contact
it. Alternatively, if the given transport protocol
is not available any longer on the server-side, the
server-side will reject the request. This will cause
the failure of the client-side plan and the automatic
activation of the next available option. Finally, the ac-
tual connection creation is delegated to wiring plans
setupClientAdapter and setupServerAdapter
that account for the characteristics of the transport
protocol selected in the first negotiation phase.
Noticeably, the standardized interface with the
component layer, which supports loading/configuring
and binding of components, the wiring plans can use
declarative descriptions of the different wiring steps
rather than the steps being hard-coded in different
sub-plans. This makes much easier adding the support
for new transport protocols, and knowledge of these
wiring steps can be acquired by the agent at run-time,
or even exchanged through ACL messages among dif-
ferent agents. In general, this is a crucial feature
awarded by the SoSAA design which makes the agent
system capable of acquiring new capabilities at run-
time and in line with dynamic binding mechanisms
exploited in the specific component layer.
In the case of the TcpPull connection depicted
in Figure 2, the setupClientAdapter plan will:
(i) load the TcpPullClient component, (ii) bind it
with the local client component, and (iii) config-
ure it with the address of the server’s node and the
name of the remote server-side component. On the
server side, the setupServerAdapter plan must: (i)
load a TcpPullServer, and (ii) bind it to the server
component. In the current implementation, the ac-
tual initialization of the connection in the server
side is performed by a TcpTransport service compo-
nent, also depicted in Figure 2, which accepts all in-
coming requests on a single server socket and noti-
fies the required TcpPullServer component with the
resulting client socket. In each case, the wiring
plan records the details of the connection by stor-
ing a Belief(client/serverConnection(...))
matching the goal posted at the beginning of the con-
nection dialogue plan.
This hierarchical organization between applica-
tion agents, transport managers, and components, is
designed to handle functional and non-functional re-
quirements in terms of goals with decreasing levels of
abstractions. Application agents are driven by higher-
level functional goals (e.g. ”componentA needs data
from componentB”), which are resolved with the se-
lection of suitable collaborating components. Trans-
HYBRID AGENT & COMPONENT-BASED MANAGEMENT OF BACKCHANNELS
157

Figure 4: AUML TransportManager’s dialogue plan (se-
tupRemoteConnection) Legend: P: Communication Proto-
col;A: Name of component A; AI: Name of interface for
component A; B: Name of component B; BI: Name of in-
terface for component B; BA: Name of network adapter for
component B.
port agents are driven by lower-level goals concerning
the initiation and the maintenance of concrete inter-
component connections. They are also responsible
for reacting in case of failure and for trying alterna-
tive transport mechanisms before notifying the appli-
cation level of the connection error. The component
layer is passive and carries out higher-level instruc-
tions and performs the default behaviour hard-coded
in the functional components (e.g. ”always provide
data to a pull request”) or system components (e.g.
”always accept an incoming TCPIP connection”).
By monitoring the adapter components, through
the focus operator, the SoSAA Adapter is aware of
the state of the underlining communications, which
also means that there is no need to exchange any more
messages between the transport manager, other than
the minimum three messages necessary to synchro-
nize and agree on the terms of the communication.
Errors in the transport protocols or unexpected
exceptions, such the closing of a socket, are sim-
ply reported to the local transport manager in form
of Belief(error(?Adapter, ?ErrorDetails)).
By dropping Belief(client/serverConnection)
from the agent’s beliefs, the AF reasoning engine
automatically tries to restore the connection, by re-
activating the connection dialogue plan.
Finally, the SoSAA Adapter can be used to de-
fine bottom-up connection strategies, whose handling
connections that are initiated within the component-
layer. In the case of a TCPIP connection, the transport
manager can simply intercept the initiation of a new
connection (by overriding the event notification be-
tween the TcpTransport and the TcpPullServer com-
ponent) and collaborate with one or more application-
level agents to take a more informed decision upon the
connection, e.g. in order to implement load-balancing
or application-specific security mechanisms.
5 CONCLUSIONS
This paper presents an approach to backchannel man-
agement built using the Agent Factory and JMCF im-
plementation of SoSAA. Further, it attempts to show
how both SoSAA and the backchannel management
mechanism can be used to construct hybrid agent-
component applications. A key advantage of our ap-
proach arises from the clear separation of concerns
that exists between the application logic agents and
transport manager agents that form part of the SoSAA
infrastructure, and which manage the creation, config-
uration, and maintenance of backchannels.
REFERENCES
Collier, R., O’Hare, G., Lowen, T., and Rooney, C. (2003).
Beyond Prototyping in the Factory of Agents. Multi-
Agent Systems and Application III: 3rd International
Central and Eastern European Conference on Multi-
Agent Systems, Ceemas 2003, Prague, Czech Repub-
lic, June 16-18, 2003: Proceedings.
Collier, R. W. and O’Hare, G. (2009). Handbook of Re-
search on Emerging Rule-Based Languages and Tech-
nologies: Open Solutions and Approaches, chapter
Modeling and Programming with Commitment Rules
in Agent Factory. IGI Publishing.
Dragone, M. (2007). An agent-based robot software frame-
work. PhD thesis, School of Computer Science and
Informatics, University College Dublin.
Dragone, M., Lillis, D., Collier, R. W., and O’Hare, G.
M. P. (2009). SoSAA: A Framework for Integrating
Agents & Components. In Proceedings of the 24th
Annual Symposium on Applied Computing (ACM SAC
2009), Special Track on Agent-Oriented Program-
ming, Systems, Languages, and Applications, Hon-
olulu, Hawaii, USA.
Gat, E. (1992). Atlantis: Integrating planning and react-
ing in a heterogeneous asynchronous architecture for
controlling real-world mobile robots. In Proceedings
of the Tenth National Conference on Artificial Intelli-
gence, pages 809–815.
Sycara, K., Paolucci, M., Van Velsen, M., and Giampapa, J.
(2003). The retsina mas infrastructure. Autonomous
agents and multi-agent systems, 7(1):29–48.
ICSOFT 2009 - 4th International Conference on Software and Data Technologies
158
