
MANAGING COMBINATORIAL OPTIMIZATION PROBLEMS
BY MEANS OF EVOLUTIONARY COMPUTATION
AND MULTI-AGENT SYSTEM
Mauricio Paletta
Centro Inv. Inf. y Tec. Comp. (CITEC), Universidad de Guayana (UNEG), Av. Atlántico, Ciudad Guayana 8050, Venezuela
Pilar Herrero
Facultad de Informática, Universidad Politécnica de Madrid (UPM), Campus de Montegancedo S/N; 28660, Madrid, Spain
Keywords: Evolutionary Program, Multi-agent System, Inter-agent Communication Protocol, JADE.
Abstract: The necessity for solving a combinatorial optimization problem is very common. Evolutionary/genetic
program could be used to deal with such situations. Unfortunately, depending on the complexity of the
problem, high computational capabilities are required, primarily in those cases in which measuring the
quality of a potential solution is very demanding. However, advances in Distributed Artificial Intelligence
(DAI), Multi-Agent Systems (MAS) to be more specific, could help users to deal with this situation by
parallelizing the evolutionary program aiming to distribute the computational capabilities required. This
paper presents an inter-agent MAS protocol for parallelizing an evolutionary program aiming to reduce the
communications requirements necessary as well as allowing a response within a reasonable period of time.
1 INTRODUCTION
Evolutionary/Genetic Programs (EPs) (Eiben et al,
2003), (Jain et al, 2007) are powerful searching
techniques used to solve Combinatorial
Optimization Problems (COPs) in many disciplines.
Depending of the complexity of the problem, EPs
could require high computational capabilities such
as CPU time, memory, etc. This problem increases
considerably if the calculation of the fitness function
for evaluating any potential solution also requires
high computational capabilities.
Parallelizing EPs has been proposed to overcome
the above problem (Andre et al, 1996), (Arenas et al,
2002), (Lee, 2007). The basic idea is to divide a big
population into multiple smaller sub-populations that
are distributed to separate processors and can then
evaluated simultaneously. Combination of EP and
MAS technologies (Ferber, 1995) is essential for
accomplishing this objective.
In order to reduce the communication necessities
required for parallelizing EPs, this paper focuses on
defining a multi-agent architecture, establishing an
interaction protocol for obtaining a suitable solution,
based on EP specifications for any specific COP.
The rest of the paper is organized as follows:
section 2 presents some work related to the scope of
this paper; section 3 describes the proposed inter-
agents protocol; section 4 shows the evaluation of
this proposal. Finally, section 5 reaches some
conclusions and future work.
2 RELATED WORK
Some examples of making evolutionary algorithms
in distributed environments can be consulted on
(Arenas et al, 2002), (Meng et al, 2007). DREAM
(Arenas et al, 2002) and G2DGA (Berntsson, 2005)
are examples of frameworks concerning
development of Peer-to-Peer distributed computing
systems. Using JADE (Bellifemine et al, 1999),
(Chmiel, 2005) as a middleware to propose a multi-
agent synchronous evolutionary system can be
reviewed on (Eiben et al, 2007), (Lee, 2007) and
(Meng et al, 2007). The newscast protocol (Jelasity
et al, 2002), which is a lazy fully distributed
information propagation protocol, is an example of a
work with the same goal but different scope.
253
Paletta M. and Herrero P. (2010).
MANAGING COMBINATORIAL OPTIMIZATION PROBLEMS BY MEANS OF EVOLUTIONARY COMPUTATION AND MULTI-AGENT SYSTEM.
In Proceedings of the 2nd International Conference on Agents and Artificial Intelligence - Agents, pages 253-256
Copyright
c
SciTePress

3 OVERALL INTER-AGENT
PROTOCOL
The proposed inter-agents communication protocol
occurs in a general that basically consists of two
different types of agents:
1) EPEnvAgent which: 1) informs the rest of
the agent about the EP parameters and problem
specifications; 2) takes control of the population
growth; and, 3) allows the evolution among multiple
system nodes.
2) EPAgent which represents a potential
solution to the problem as well as carry out the main
steps of evolutionary computation: selection and
variation (crossover and mutation) - to generate
descendants (new potential solutions / agents).
Other elements involved in the architecture are
the EP parameters (population size, probability of
applying genetic operators, among others), and the
problem specifications which is necessary to define
a specific COP.
Each computational node may have multiple
EPAgent (a population) but only one EPEnvAgent is
needed. The number of EPAgent in the system
(population size) may vary, as the EP evolves. An
EPAgent can be created as well as eliminated from
the system. The creation of new EPAgent is the
result of applying genetic operators, while the
disposal is due to self-destruction or suicide. Some
parameters are used to control these functions.
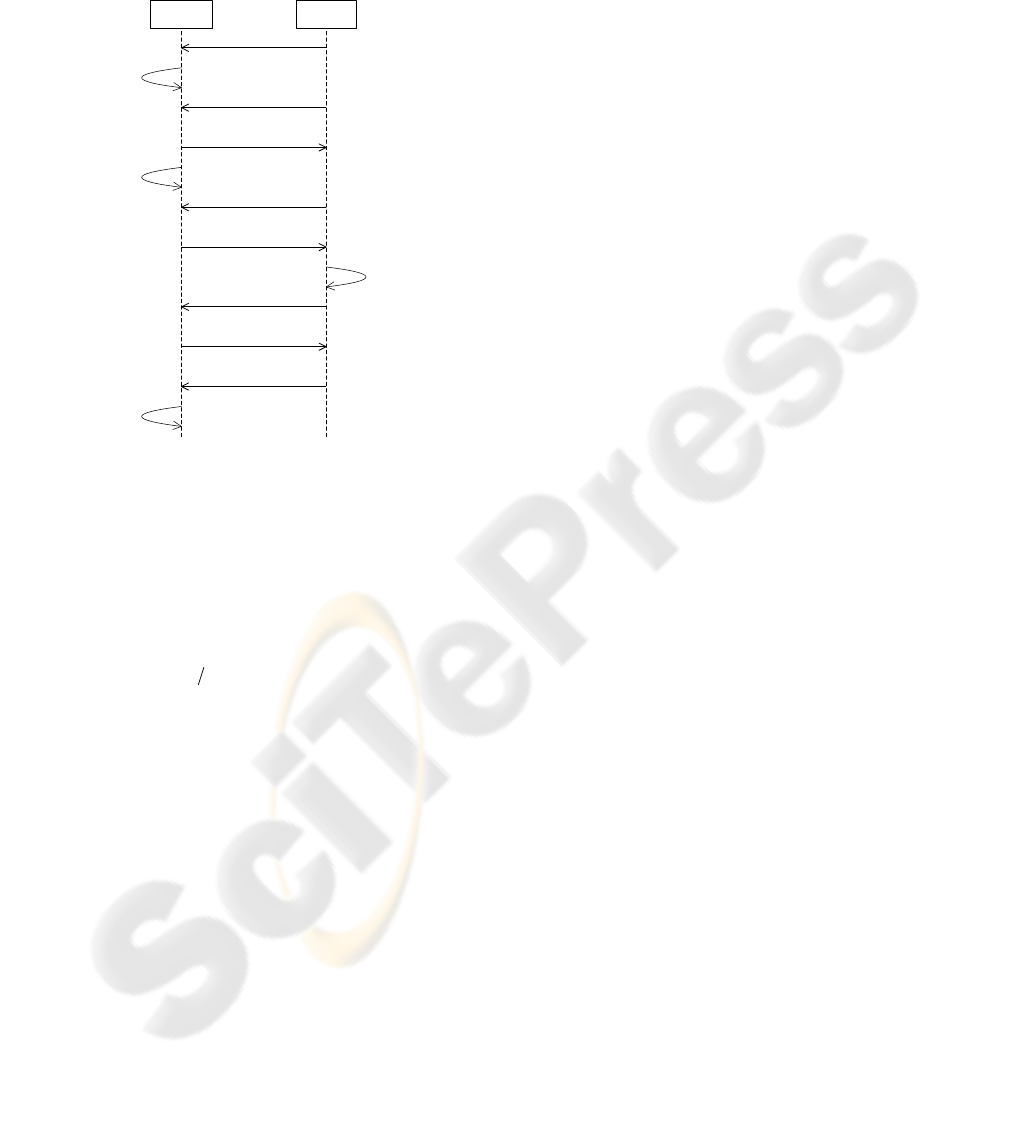
On the other hand, and following the FIPA ACL
specifications (FIPA, 2002), agents communicate
with each other according to the messages shown in
Figure 1. Messages are the following:
INFORM, from EPAgent to EPEnvAgent. For
EPEnvAgent to keep some statistics of the
evolutionary process and keep track of the best
solution it has at any given time, any EPAgent uses
this message to report or inform its measure of
quality (fitness), as well as the structure that
represents the solution to the COP (chromosome).
PROPAGATE, from EPEnvAgent to
EPEnvAgent. When an EPEnvAgent realizes that
has obtained a better individual (solution) in the
population of EPAgents, it uses this message to
transmit /propagate this information to the rest of
EPEnvAgent.
REQUEST, from EPAgent to EPEnvAgent. In
this proposal, EP parameters may change
dynamically. An EPAgent should, from time to time,
requests by using this message the EPEnvAgent to
send back the parameters.
INFORM, from EPEnvAgent to EPAgent. In
response to the previous message, the EPAgent is
receiving the EP parameters from the EPEnvAgent.
It is important to mention that these parameters can
change the way in which EPAgents may vary to
produce descendants (new EPAgents) or self-
destruction.
INFORM_REF, from EPEnvAgent to
EPEnvAgent. By using this message, the main
EPEnvAgent informs all the auxiliary EPEnvAgent
changes in the EP parameters.
PROPOSE, from EPAgent to EPEnvAgent. In
this proposal each EPAgent is responsible for
searching (selecting) a suitable partner to cross.
Through this message, the EPAgent makes a request
to find a suitable partner by sending its fitness and Id
as parameters of the message. These parameters are
needed when some other EPAgent accepts the
request and responds appropriately to the sender.
PROPOSE, from EPEnvAgent to EPAgent. By
this message, the EPEnvAgent replicates the
proposal sent by an EPAgent for the rest of
EPAgents. They become aware of it, so that, they
can respond directly to EPAgent who made the
original request.
ACCEPT_PROPOSAL, from EPAgent to
EPAgent. An EPAgent uses this message to respond
positively to a request from another EPAgent for
crossing with it. This happens only if it decides to
accept the proposal (based on the fitness received
from the sender agent and by using some
probabilities). The EPAgent sends its chromosome
so that the sender can use it for applying the
corresponding genetic operation.
REQUEST_WHENEVER, from EPAgent to
EPEnvAgent. EPAgents are responsible for the
selection mechanism and for applying genetic
operators to generate new EPAgents. These new
agents must be created by the EPEnvAgent. Through
this message, the EPEnvAgent knows that a new
EPAgent must be created with the chromosome
given as a parameter of the message.
CONFIRM, from EPEnvAgent to EPAgent.
EPEnvAgent has the control to start and stop the
evolution. When the process has to be finished, the
EPEnvAgent uses this message to give to all
EPAgents the order to self-destruct.
CONFIRM, from EPAgent to EPEnvAgent.
Once an EP-Agent is self-destructed, either because
it received an order from the EPEnvAgent or for
effect of this evolutionary algorithm (by using some
parameters and based on the current fitness), its uses
this message to confirm his suicide.
CONFIRM, from EPEnvAgent to
EPEnvAgent. If the receiver is the main
EPEnvAgent, then some auxiliary EPEnvAgent has
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
254
decided to stop its participation in the evolution
process. On the other hand, if the receiver is an
auxiliary EPEnvAgent, then the entire evolution
process must be stopped.
EPEnvAgent EPAgent
INFORM
PROPOSE
PROPOSE
(Fitness, Chromosome)
(Fitness, Chromosome, Agent Id)
(Fitness, Agent Id)
REQUEST
INFORM
(EP Parameters)
REQUEST_WHENEVER
(Chromosome)
ACCEPT_PROPOSAL
(Chromosome)
CONFIRM
CONFIRM
An agent is informing
its fitness
An agent is requiring
the EP parameters
An agent is requiring another
agent for crossing with him
An agent is reporting a new
agent should be created
An agent is
confirming its suicide
The agent is
receiving the EP
Parameters
An agent is requiring for
crossing with the current agent
The EPEnv is giving
order to commit suicide
An agent accepted the
proposal sent for the
current agent
PROPAGATE
(Fitness, Chromosome)
INFORM_REF
(EP Parameters)
CONFIRM
(Agent Id)
Figure 1: Inter-agents communication protocol.
A method for estimating the total number of
messages TM requires to complete an evolution,
which has duration of T time units, is shown in (1).
101211110
6298
376
35143
12211
1
12
1
;
;
;
; ;
; ;
;
MsgnMsgTNApMsgMsg
MsgpMsgMsg
TNApMsgMsg
MsgnMsgtTnMsgMsg
MsgnMsgTNAppMsg
NaNAMsgTM
n
i
i
i
i
(1)
Where:
p
1
: probability that an agent commits self-suicide.
p
2
: probability that an agent accepts to cross with another ag.
p
3
: probability to produce at least one descendant.
t
1
: time in which parameters are sought.
NA: the total number of agents.
Na
i
: the total number of agents for node i.
n: the total number of nodes.
Msg
i
: the total number of messages of type i.
Next section provides some results from
experiments conducted with the proposal.
4 EVALUATION
In order to implement the inter-agents
communication protocol proposed in this paper as
well as the MAS-based evolutionary algorithm, a
JADE-based framework called EP-MAS.Lib (Paletta
et al, 2009) was developed. For evaluating the
proposal we have implemented a solution for two
different problems, varying the computational
capabilities demanded to calculate the fitness of an
individual or potential solution for the problem.
The first issue to be considered is related to the
Traveling Salesman Problem (TSP) which is a well-
known NP-hard COP (Lawler et al, 1985). In this
case, computational capabilities demanded are very
low. The experimentation was conducted using the
data relative to the 51-cities Christofides and Eilon
(Christofides et al, 1972).
The second problem has to do with finding the
proper setting of parameters required to configure an
Artificial Neural Network (ANN) for a particular
investigation that is currently being developed
(Paletta et al, 2008). Fitness in this problem consists
in training an ANN and obtains the corresponding
total average error aiming to reduce it. Unlike the
previous case, the calculation of this fitness is very
demanding on computational capabilities.
Both problems were implemented using a
conventional simple genetic program, as well as
using the distributed model presented in this paper,
aiming to compare the efficiency of each case to
deal with the same problem.
Based on the results obtained we observed:
1) A solution for TSP problem was obtained
more efficiently using the simple genetic program
than the MAS-based distributed proposal. The
difference is about 10 to 1 in execution time.
2) Related to the ANN configuration, the
simple genetic program needed 42.3 hours for
obtaining a satisfactory solution. However, by using
the MAS-based distributed proposal (with 3 nodes),
a solution was obtained in 6 hours approximately.
The results show that the proposed protocol
allows distributed computational capabilities among
more than one node in such a way to expedite the
process of convergence of the searching algorithm.
Table 1 shows the results obtained by using the
expression (1) for estimating the total number of
messages TM required for these experiments. As
expected the complexity of the problem is directly
proportional to the communication needs required
by the EP. Parameters are: p
1
=0.55; p
2
=0.8; p
3
=0.5;
t
1
=5 min; NA=300; Na
i
=100, i (1 i 3); n=3.
MANAGING COMBINATORIAL OPTIMIZATION PROBLEMS BY MEANS OF EVOLUTIONARY COMPUTATION
AND MULTI-AGENT SYSTEM
255
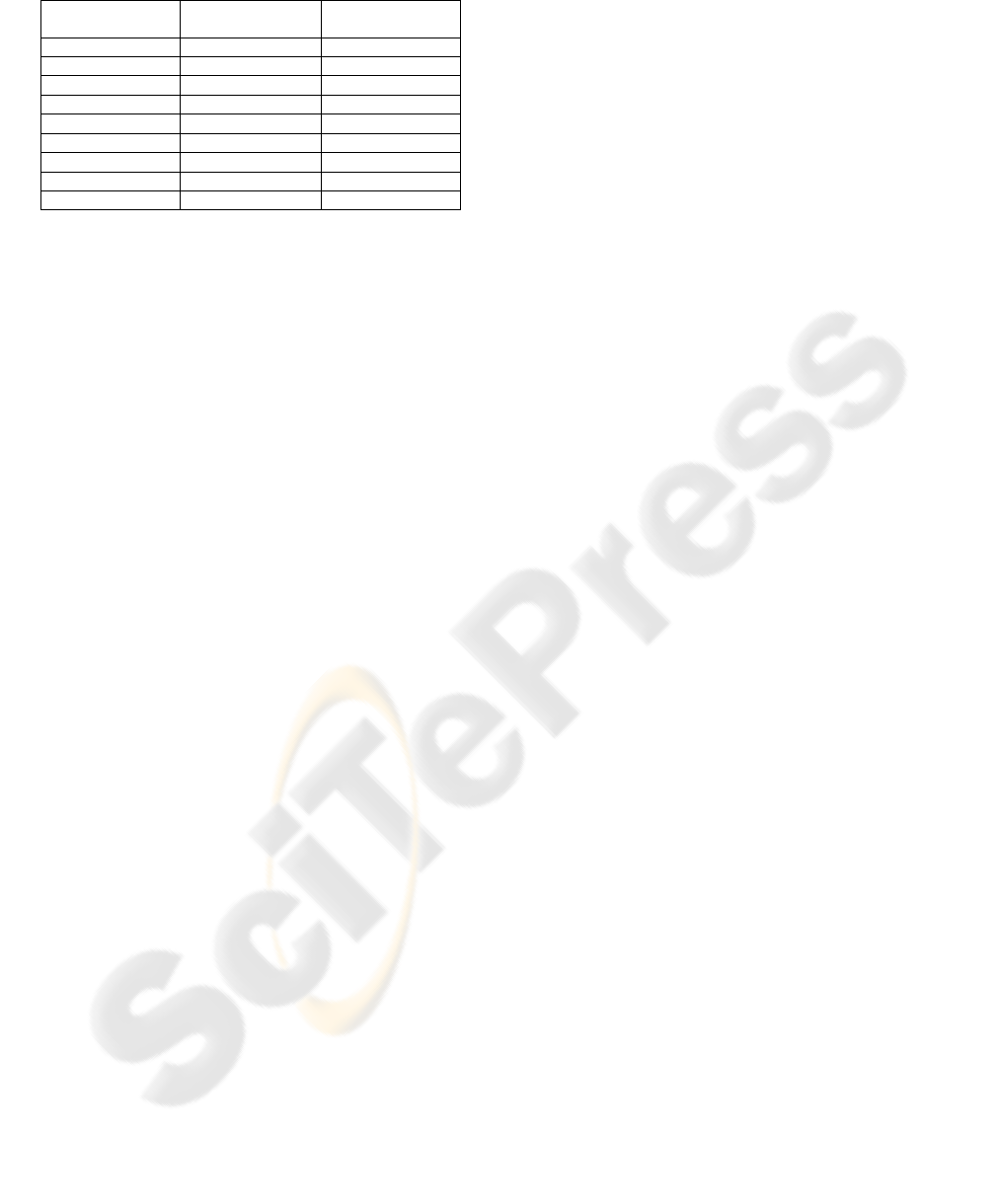
Table 1: Detail of the estimated total number of messages.
Messages
TSP
(T = 45 min)
ANN
(T = 360 min)
Msg
1
5,940
47,520
Msg
2
17,820
142,560
Msg
3
= Msg
4
27
216
Msg
5
81
648
Msg
6
= Msg
7
6,750
54,000
Msg
8
= Msg
9
5,400
43,200
Msg
10
= Msg
11
7,425
59,400
Msg
12
22,275
178,200
TM
85,320
682,560
5 CONCLUSIONS AND FUTURE
WORK
In this paper we present a communication protocol
between agents to be used in a MAS scenario aiming
to resolve a specific COP. As we know, this
proposal differs from other similar works in the
following aspects:
It focuses on the communication process
between the agents in the systems and therefore to
the cooperation needed for solving the evolutionary
algorithm, instead of the properly used elements of
the evolutionary algorithm (selection mechanism
and genetic operations).
The evolutionary algorithm (selection and
variation) is not controlled by a central entity;
instead it’s controlled by all individuals (agents) of
the population actively involved in this process.
The needed information (EP parameters and
problem specifications) is not located in a central
repository, but it is replicated for all who need it.
The definition of a particular COP.
The obtained result point out that agent in a
MAS-based environment can interact with each
other to solve any COP by using the communication
protocol proposed.
We are working on reducing the flow of
messages and data that is required to avoid possible
bottleneck.
REFERENCES
Andre, D., Koza, J., 1996. A parallel implementation of
genetic programming that achieves super-linear
performance. In Proc. Intern. Conf. on Parallel and
Dist. Processing Techniques and App., pp. 1163-1174.
Arenas, M.I., Collet, P., Eiben, A.E., Jelasity, M., Merelo,
J.J., Paechter, B., Preuss, M., Schoenauer M., 2002. A
Framework for Distributed Evolutionary Algorithms.
In Proc. 7th Int. Conf. on Parallel Problem Solving
from Nature (PPSN VII). LNCS 2439, pp. 665-675.
Bellifemine, F., Poggi, A. Rimassa, G., 1999. JADE – A
FIPA-compliant agent framework. Telecom Italia
internal technical report. In Proceedings Int. Conf. on
Practical Applications of Agents and Multi-Agent
Systems (PAAM'99), pp. 97-108.
Berntsson, J., 2005. G2DGA: an adaptive framework for
internet-based distributed genetic algorithms. In Proc.
of the 2005 workshops on Genetic and Evolutionary
Computation (GECCO), pp. 346-349.
Chmiel, K., Gawinecki, M., Kaczmarek, P., Szymczak,
M., Paprzycki, M., 2005. Testing the Efficiency of
JADE Agent Platform. In Proc. 3rd Int. Symposium on
Parallel and Distributed Computing (ISPDC), IEEE
Computer Society Press, 13(2) pp. 49-57.
Christofides, N., Eilon, S., 1972. Algorithms for Large-
Scale Travelling Salesman Problems. Operations
Research Quarterly, 23(4), pp. 511-518.
Eiben, A.E., Smith, J.E., 2003. Introduction to
Evolutionary Computing. Springer Verlag.
Eiben, A.E., Schoenauer, M., Jiménez, J.L., Castillo, P.A.,
Mora, A.M., Merelo, J.J., 2007. Exploring Selection
Mechanisms for an Agent-Based Distributed
Evolutionary Algorithm. In Proceedings Genetic and
Evolutionary Comp. Conf. (GECCO), pp. 2801-2808.
Ferber, J., 1995. Les systems multi-agents, Vers une
intelligence collective. Ed. InterEditions, pp. 1-66.
FIPA, 2002. Foundation for Intelligent Physical Agents.
FIPA ACL Message Structure Specification,
SC00061, Geneva, Switzerland.
Jain, L.C., Palade, V., Srinivasan, D., (Eds.) 2007.
Advances in Evolutionary Computing for System
Design. Studies in Computational Intelligence, vol. 66.
Springer Verlag. ISBN: 978-3-540-72376-9.
Jelasity, M., van Steen, M., 2002. Large-scale newscast
computing on the Internet. Technical Report IR-503,
Vrije Universiteit Amsterdam, Department of
Computer Science, October.
Lawler, E.L., Lenstra, J.K., Rinnooy, A.H., Shmoys, D.B.
(Eds.), 1985. The Travelling Salesman Problem: A
guided tour of combinatorial optimization. New York:
Wiley and Sons.
Lee, W., 2007. Parallelizing evolutionary computation: A
mobile agent-based approach. Expert Systems with
Applications, 32(2), pp. 318-328.
Meng, A., Ye, L., Roy, D., Padilla, P., 2007. Genetic
algorithm based multi-agent system applied to test
generation. Computers & Education 49, pp. 1205-
1223.
Paletta, M., Herrero, P., 2008. Learning Cooperation in
Collaborative Grid Environments to Improve Cover
Load Balancing Delivery. In Proc. IEEE/WIC/ACM
Joint Conf. on Web Intelligence and Intelligent Agent
Tech. IEEE Computer Society, pp. 399-402.
Paletta, M., Herrero, P., 2009. EP-MAS.Lib: A MAS-
Based Evolutionary Program Approach. In Proc. 4th
Int. Conf. on Hybrid Artificial Intelligence Systems
(HAIS 2009), LNAI 5572, Springer-Verlag, pp. 9-17.
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
256
