
AUTOMATED ASSESSMENT OF PHYSICAL-MOTION TASKS
FOR MILITARY INTEGRATIVE TRAINING
Neil C. Rowe, Jeff P. Houde, Mathias N. Kolsch, Christian J. Darken, Eric R. Heine, Amela Sadagic
MOVES Institute, U.S. Naval Postgraduate School, 1411 Cunningham Road, Monterey, California, U.S.A.
Chumki Basu, Feng Han
Sarnoff Corporation, Box 5300, Princeton, New Jersey, U.S.A.
Keywords: Training, Military, Tracking, Motion, Performance, Assessment, Behavior Analysis, Image Processing,
Global Positioning System.
Abstract: We describe the performance assessment component of the BASE-IT system, a real-time monitoring system
of performance of U.S. Marines during training exercises for urban warfare. This automated component
measures how well Marines are following procedures and staying safe, by tracking where they are and
where they are looking. Such monitoring of physical motion is a relatively new application of computer
technology with implications for instruction in physical education, choreography, and police work.
1 INTRODUCTION
Most computer technology supporting education has
implemented the electronic equivalent of paper.
However, there are important skills that students
need to learn that involve different activities like
physical motion. Good examples occur in physical
education, choreography, industrial training, and
military training. Technology now enables us to
automatically assess such skills by tracking human
motion with wireless communications, computer
vision, and sensor analysis. These permit us to
measure where people are, how their limbs and
torsos are configured, and what gestures they are
making. These open new opportunities for
automated assistance by computers.
We describe one example, ongoing work for
our BASE-IT Project in monitoring U.S. Marine
integrative training for urban warfare. We are
building a system to noninvasively track the
Marines, then analyze what they are doing in real
time. While some of this system is specific to
Marine needs, many parts of it could be applied to
other kinds of education and training.
2 MONITORING PHYSICAL
MOTION
In the training of physical motion, video of students
is helpful but has drawbacks: Important events can
happen too fast to see adequately, they can be
occluded by other people or objects, they can be rare
within much irrelevant data, and video alone doesn't
highlight problems and mistakes. Better results can
be obtained with automated video analysis, and this
is now being used to aid instruction for such motions
as golf and tennis swings (Stepan and Zara, 2002).
One technology being explored involves "motion
capture" using wearable devices with accelerometers
that can measure joint motions precisely (Chen and
Hung, 2009; Knight et al, 2007). Also used are
special "studio" training environments with multiple
cameras. These technologies are starting to be used
for choreography (Nakatsu, Tadenuma, and
Maekawa, 2001) and other forms of theater, and also
in military and police training where motion in
crises is important. Putting students in studios for
training is not always possible, as in much industrial
training. Also, wearable devices are obtrusive as
they require special equipment; students are aware
of the devices and this affects their behavior.
Devices may also be unnecessary for many training
tasks for which it suffices to monitor whole-body
190
C. Rowe N., P. Houde J., N. Kolsch M., J. Darken C., R. Heine E., Sadagic A., Basu C. and Han F. (2010).
AUTOMATED ASSESSMENT OF PHYSICAL-MOTION TASKS FOR MILITARY INTEGRATIVE TRAINING.
In Proceedings of the 2nd International Conference on Computer Supported Education, pages 190-195
DOI: 10.5220/0002775801900195
Copyright
c
SciTePress

motions by multi-camera monitoring and data
fusion.
3 THE MARINE TRAINING TASK
U.S. Marine soldiers receive extensive training on a
wide range of skills. The dangerous nature of their
occupation means that improper execution of skills
can be a matter of life or death, so training is
important. Urban warfare is particularly difficult
because many different skills must be exercised in
nonstereotypical ways. Marines have assigned
urban-warfare missions such as searching people or
vehicles while staying alert to potential dangers from
snipers and explosive devices. They must also
manage contacts with local civilians who may or
may not have friendly intentions.
Urban warfare skills are taught at many times
during Marine training programs, but are particularly
focused on during the later stages before deployment
overseas. This training involves mockups of a town
environment in which they must patrol, conduct
searches, run checkpoints, respond to unexpected
events, and deal with "roleplayers", actors
representing local inhabitants. Our BASE-IT Project
focuses on these exercises.
Assessment is an important part of training.
Instructors watch the Marines during the exercises
and provide feedback mostly afterwards during
"after-action reviews", a method also used by the
U.S. Army (Hixson, 1995). Reviews cover both
short-term problems (like weapons safety) and
longer-term problems (like the proper sequence for
searching a building). Instructors have Training and
Readiness Manuals that contain checklists and
expected-event sequences that they use to assess
performance. This assessment is mostly qualitative,
e.g. "Appropriate techniques of movement when
crossing danger areas."
Marines carry a good deal of equipment and
cannot carry more because of the active nature of
their jobs. However, some carry GPS units to report
their locations.
4 THE BASE-IT SYSTEM
We describe the performance assessment component
of the BASE-IT system covered in broader detail in
(Sadagic et al, 2009). It takes inputs from a database
of real-time quantitative measurements performed
on the trainees during assessment. This data comes
from video cameras monitoring the training area
from a variety of positions and angles, and from
GPS units on the Marines and roleplayers which
provide redundant data improving accuracy (Cheng
et al, 2009). Camera orientations are automatically
controlled by BASE-IT to focus on areas of activity.
GPS position data is fused with positions obtained
from comparing the camera image to a background
model to improve location accuracy.
Computer vision-based analysis of the Marines
reveals details about their postures and orientations
(Figure 1). Three full-body stances are
distinguished (standing, kneeling, and lying down),
four torso orientations (towards the camera, away
from the camera, left, and right), and four head
orientations. This analysis is done on each video
frame without a background model. The
appearances of small image patches are compared to
learned examples of different postures (Wachs,
Goshorn, and Kolsch, 2009). Results are improved
through temporal post-processing with a hidden
Markov model. Information is then correlated with
known camera positions and orientations to get real-
world orientations.
Figure 1: Example of inference of orientations of Marines.
BASE-IT output is visualized in three
complementary ways: Moving icons on a "sand
table" of three-dimensional white blocks with
images projected onto them, video cutouts
embedded in a three-dimensional environment, and a
"free play game" wherein Marines can be shown
from any angle doing what they should have done as
well as what they actually did. Performance
assessment information can enhance all three of
these output options. For instance, we display a
timeline with the third option where colored dots
code possible mistakes of the Marines (Figure 2).
4.1 Performance Assessment in
BASE-IT
Performance assessment attempts to capture things
that good human instructors would note during
training, but can be missed due to the occlusions by
walls, large distances, and the limited number of
AUTOMATED ASSESSMENT OF PHYSICAL-MOTION TASKS FOR MILITARY INTEGRATIVE TRAINING
191

Figure 2: Example visualization from above and from
ground level, with observed problems color-coded.
instructors. We compute both "metrics" and "issues"
during training. Metrics are numeric measures of
things important to instructors, mostly on a scale of
0 (good) to 1 (bad). Issues are problems that may
require comment by instructors and could be
potential mistakes, but may have valid excuses in
context. Details of the formulas and algorithms we
use to compute these are in (Rowe, 2009).
Performance assessment is implemented in C++
using a Microsoft Sequel Server database.
The metrics we compute for a team or squad of
Marines (4-13 people) are dispersion, collinearity,
number of clusters, non-Marine interaction, danger,
awareness, mobility, speed, "flagging" (pointing
weapons at one another), weapons coverage, being
too close to a window or door, being too far from a
window or door, surrounding of a location, and
centrality of the leader. The issues we observe
automatically are of two kinds, those applying to an
individual Marine and those applying to the entire
group of Marines being monitored. In the first
category are a Marine too close to another, a Marine
too close to a window or door, a Marine aiming a
weapon at another, a Marine excessively exposed to
sniper positions, and a Marine not "pieing" (covering
a nearby door or window with a weapon). In the
second category are groups too clustered, groups too
far from one another, groups too collinear, groups in
too few clusters, groups without non-Marine
interaction, groups moving too fast, groups too close
to windows and doors, groups with poor awareness
of potential danger, groups with poor weapons
coverage, and groups with poor leader centrality.
Metrics and issues are aggregated to provide
statistics on average and maximum metrics and
numbers of issues per squad and exercise, per squad
over all exercises, per behavior category per squad
and exercise, and per behavior category per squad
over all exercises. This helps instructors to find
squads with particular problems, exercises that are
particularly difficult, and trends over time of which
instructors should be aware.
Figure 3: Tracks for experiment 415.
4.2 Experimental Results: Metrics and
Issues
In our first experiments at Sarnoff Laboratories, we
had four Marines and two civilians execute a
scenario around two small sheds (Figure 3). The
scenario included a civilian being searched (coming
from the north) and a sniper that had to be captured
(from the south), and took around four minutes to
perform. Positions and orientations were recorded at
7 hertz and subsampled to 1 hertz. Figure 3 shows
the paths followed for one representative run,
experiment 415. Marines started at the southeast,
took cover from a sniper on the north side of the
sheds (black rectangles), handled the civilian (to
north) and the sniper (to south), and exited to the
west except for the civilian exiting to the north.
Figures 4-7 show example metrics for
experiment 415. Figure 4 shows dispersion.
Because they needed to take cover from the sniper,
at times they were insufficiently dispersed (values
too large). Figure 5 shows roleplayer
interactions, which we estimate as times when
Marines were facing role players within a minimum
distance, a reasonable approximation in the absence
of audio (Figure 5). Interactions vary quickly since
CSEDU 2010 - 2nd International Conference on Computer Supported Education
192
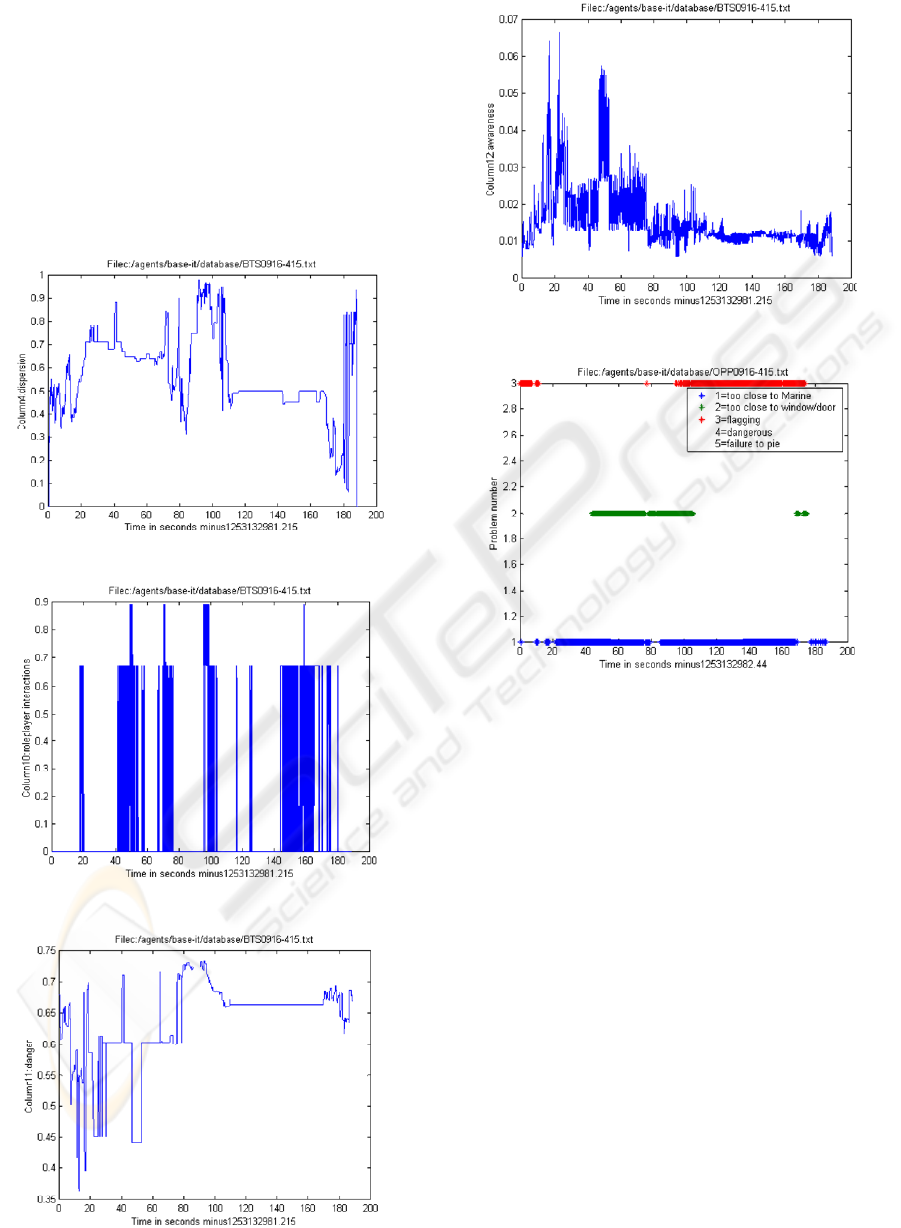
they are either present or not. Important
measurements we can make that are difficult for
human instructors to do are the degree of danger to
the Marines (Figure 6) and their degree of awareness
of it judging by where they are looking (Figure 7).
Danger came from potential sniper positions
precomputed by analysis of the terrain, including
trees and corners of a nearby building. In these
preliminary experiments, gaze was estimated by
weapon azimuth orientation, which had jitter as
Marines moved.
Figure 4: Dispersion in experiment 415.
Figure 5: Roleplayer interaction in experiment 415.
Figure 6: Danger for experiment 415.
Figure 7: Awareness of danger in experiment 415.
Figure 8: Issues for Individual Marines in Experiment 415.
These graphs are shown to the instructor after each
exercise, making more concrete the evanescent
phenomena that occurred. But more important for
Marine instructors is the identification of "issues".
One way is to display them as dots on a timeline
where each row corresponds to a particular issue.
Figure 8 shows the plot for experiment 415. Issue 1
is being too close to another Marine, issue 2 is being
too close to a window or door, and issue 3 is
pointing a weapon at another Marine. It can be seen
that the Marines were clustered more than doctrine
recommends, in part because of the smallness of the
sheds. They came too close to doors when they had
to take cover. They also had problems accidentally
pointing their weapons at one another when the
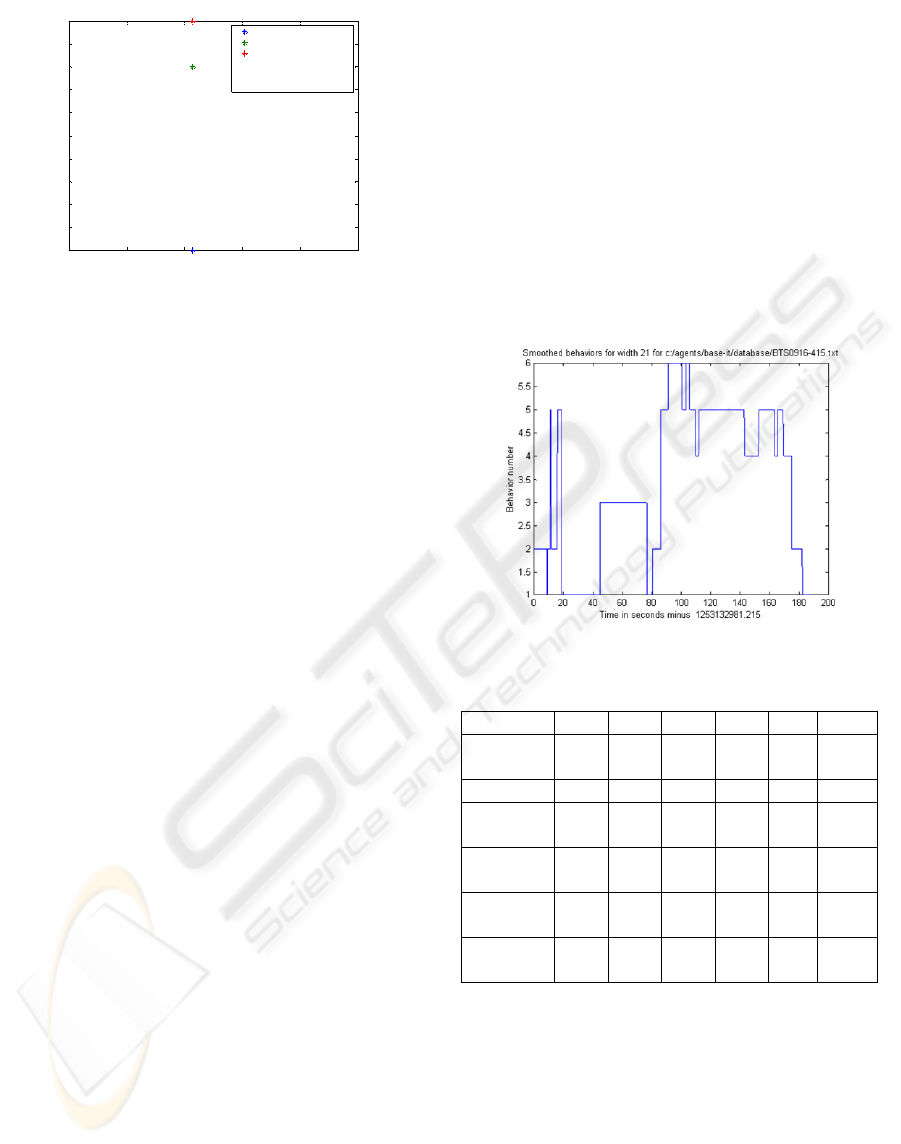
sniper was arrested. Issues for the group of Marines
as a whole were not as important, but a few were
noted for this exercise (Figure 9). These graphs can
be shown to students, but they are more useful as
guides to the instructor before showing video or
visualization like Figures 1 and 2 to students.
AUTOMATED ASSESSMENT OF PHYSICAL-MOTION TASKS FOR MILITARY INTEGRATIVE TRAINING
193
186.5 187 187.5 188 188.5 189
104
104.5
105
105.5
106
106.5
107
107.5
108
108.5
109
Time in seconds minus1253132982.44
Problem number
Filec:/agents/base-it/database/OPP0916-415.txt
103 = Marines collinear
104=too few clusters
106=too fast
108=unawareness
109=uncoverage
110=leader not central
Figure 9: Issues for the group of Marines.
4.3 Behavioral Analysis
A problem with our metrics and issues is that they
consider only a narrow context. So we try to infer
automatically what state the set of Marines is in, and
tabulate metrics and issues separately for each state
as in (Minnen et al, 2007).
Figure 10 graphs six inferred behaviors for
experiment 415 where height 1 = getting orders, 2 =
patrol, 3 = taking cover, 4 = surrounding a target, 5
= roleplayer interaction, and 6 = controlling or
directing a roleplayer. We used here a "case-based
reasoning" approach where we modeled behaviors
by ideal sets of parameters, and found the closest
for each time instant. Smoothing was done on both
the initial parameters and the inferred behaviors to
reduce jitter. Table 1 shows the ideal parameter sets
using six metrics (dispersion, clusters at 5m,
roleplayer interactions, mobility, speed, and
window/door closeness) with weightings of (1, 0.5,
1, 10, 1, 1). Now for Figure 8 we can excuse the
first (too close to fellow Marines) and second (too
close to windows or doors) issues for the time
periods like 43-75 seconds in which the inferred
behavior was "taking cover".
For a more general approach, we will be basing
behaviors on the Techniques, Tactics and Procedures
in Marine manuals and training documents. The set
of states, events and properties described there
define a vocabulary from which we built an event-
detection framework. This framework uses the
video and sensor data to classify states and events
from a set of known behaviors (Cheng et al, 2009).
We will identify about 50 behavioral states using a
support-vector machine approach. For each state,
we store associated properties including initial
classification criteria for the state based on metrics,
their triggering events, and their transition states.
We also store a "histogram of oriented occurrences"
for each state to aid recognition of complex group
activities; it captures the interactions of all entities of
interest in terms of configurations over space and
time. Taxonomies describe both states and trigger
events. For example, patrolling has subtypes of
reconnaissance and raids, and involves either single-
line, staggered-column, or wedge formations;
reacting to a sniper has parts of seeking cover,
suppressing the sniper, manuevering, blocking
escape routes, and assaulting the sniper. An
advantage of such a general-purpose methodology
and supporting software is that they can be applied
to other types of training situations by using
different taxonomies.
Figure 10: Inferred behaviors for experiment 415.
Table 1: Ideal parameter values for the behavior classes.
Disp. Clus. Inter. Mob. Spd. Wind.
receiving
orders
0.5 1 0 0.05 0.1 0.3
patrol 0.2 2 0 0 0.7 0.3
taking
cover
0.6 1 0.3 0.1 0 0.6
surround
a target
0.8 3 0.2 0.1 0 0.3
roleplayer
interaction
0.5 2 0.8 0.05 0.1 0.1
control
roleplayer
0.5 2 0.8 0.05 0.7 0.3
Initial assignments of states to times can be
improved by using context in the form of hidden
Markov models for training activities. We use
standard algorithms to make inferences on this
model. For instance, if we observe that the Marines
make a transition from "patrol" to "take cover", we
infer a significant probability that they heard sniper
fire. However, we can improve upon hidden Markov
models in many cases because some triggering
events may be observed, as when a civilian being
searched tries to run away and we see that. A state
CSEDU 2010 - 2nd International Conference on Computer Supported Education
194

model permits us to identify new kinds of possible
issues for a Marine unit such as forgetting a step in a
procedure, performing steps in the wrong order, or
repeating steps unnecessarily.
5 EXTENDING THE
TECHNOLOGY TO NEW
APPLICATIONS
Our technology could make important contributions
to physical education and choreography which have
previously focused heavily on the performance of
the individual in isolation. Just looking at our
metrics, instruction in team sports could benefit
from measurements of dispersion, clustering,
coverage, mobility, speed, and leadership centrality.
Instruction in choreography (Smith-Autard, 2004)
could benefit from measurements of dispersion,
collinearity, lines of sight (from our "danger"
calculation), and being too close to objects. Our
more global behavior analysis could provide
valuable information about pacing for both.
In general, our technology should help quantify a
range of physical-motion skills that are historically
hard to evaluate fairly (Hay, 2006). (Coker, 2004)
provides a taxonomy of errors in motor skills: those
due to task constraints, comprehension, perceptions
for decisionmaking, decisionmaking itself, recall of
previous learning, neuromuscular limits, improper
speed-accuracy tradeoffs, visual errors, and
proprioceptive errors. Our noninvasive motion-
monitoring technology should help particularly with
perceptions for decisionmaking, decisionmaking
itself, and visual errors, and will indirectly help with
recall of previous learning, neuromuscular limits,
speed-accuracy tradeoffs, and proprioceptive errors.
However, there remain important instructional issues
to study in the kind, timeliness, and frequency of the
new kinds of feedback from our technology to
students, as with any instructional technology.
ACKNOWLEDGEMENTS
This work was sponsored by the U.S. Office of
Naval Research. Opinions expressed are not
necessarily those of the U.S. Government.
REFERENCES
Chen, Y.-J., Hung, Y.-C., 2009. Using real-time
acceleration data for exercise movement training with
a decision tree approach. Proc. 8th Intl. Conf. on
Machine Learning and Cybernetics, Baoding, CN,
July 2009.
Cheng, H., Kumar, R., Basu, C., Han, F., Khan, S.,
Sawhney, H., Broaddus, C., Meng, C., Sufi, A.,
Germano, T., Kolsch, M., and Wachs, J., 2009. An
instrumentation and computational framework of
automated behavior analysis and performance
evaluation for infantry training. Proc.I/ITSEC,
Orlando, Florida, December.
Coker, C., 2004. Motor learning and control for
practitioners. McGraw-Hill, New York.
Hay, P., 2006. Assessment for learning in physical
education. In Kirk. D., MacDonald, D., O'Sullivan,
M., The handbook of physical education, Sage,
London.
Hixson, J., 1995. Battle command AAR methodology: a
paradigm for effective training. Proc. 27th Winter
Simulation Conf., Arlington, Virginia, USA, pp. 1274-
1279.
Knight, J., Bristow, H., Anastopoulou, S., Baber, C.,
Schwritz, A., Arvantitis, T., 2007. Uses of
accelerometer data collected from a wearable system..
Personal and Ubiquitous Computing, 11, pp. 117-132.
Minnen, D., Westeyn, T., Ashbrook, D., Presti, P., Starner,
T., 2007. Recognizing soldier activities in the field.
Proc. Conf. on Body Sensor Networks, Aachen,
Germany, March.
Nakatsu, R., Tadenuma, M., Maekawa, T., 2001.
Computer technologies that support Kansei expression
using the body. Proc. Intl. Conf. on Multimedia,
September, Ottawa, Canada.
Rowe, N., 2009. Automated instantaneous performance
assessment for Marine-squad urban-terrain training.
Proc. Intl. Command and Control Research and
Technology Symposium, Washington, DC, June.
Sadagic, A., Welch, G., Basu, C., Darken, C., Kumar, R.,
Fuchs, H., Cheng, H., Frahm, J.-M., Kolsch, M.,
Rowe, N., Towles, H., Wachs, J. and Lastra, A., 2009.
New generation of instrumented ranges: enabling
automated performance analysis. Proc.I/ITSEC,
Orlando, Florida, December.
Smith-Autard, J., 2004. Dance composition, 5th ed. A&C
Black, London.
Stepan, V., Zara, J., 2002. Teaching tennis in virtual
environment. Proc. 18th Spring Conf. on Computer
Graphics, Budmerice, Slovakia, pp. 49-54.
Wachs, J., Goshorn, D., Kolsch, M., 2009. Recognizing
human postures and poses in monocular still images.
Proc. Intl. Conf. on Image Processing, Computer
Vision, and Pattern Recognition.
AUTOMATED ASSESSMENT OF PHYSICAL-MOTION TASKS FOR MILITARY INTEGRATIVE TRAINING
195
