
THE OVERHEAD OF SAFE BROADCAST PERSISTENCY
∗
Rub
´
en de Juan-Mar
´
ın, Francesc D. Mu
˜
noz-Esco
´
ı
Instituto Tecnol
´
ogico de Inform
´
atica, Univ. Polit
´
ecnica de Valencia, 46022 Valencia, Spain
J. Enrique Armend
´
ariz-
´
I
˜
nigo, J. R. Gonz
´
alez de Mend
´
ıvil
Depto. de Ing. Matem
´
atica e Inform
´
atica, Univ. P
´
ublica de Navarra, 31006 Pamplona, Spain
Keywords:
Recoverable failure model, Group communication systems, Reliable broadcast, Uniform broadcast.
Abstract:
Although the need of logging messages in secondary storage once they have been received has been stated in
several papers that assumed a recoverable failure model, none of them analysed the overhead implied by that
logging in case of using reliable broadcasts in a group communication system guaranteeing virtual synchrony.
At a glance, it seems an excessive cost for its apparently limited advantages, but there are several scenarios
that contradict this intuition. This paper surveys some of these configurations and outlines some benefits of
this persistence-related approach.
1 INTRODUCTION
When a recoverable model is being assumed in order
to develop a dependable application, several problems
require the usage of stable storage for being solved.
A first and important example is consensus (Aguilera
et al., 1998), since some protocols being executed by
replicated processes are built on top of it (Mena et al.,
2003). Atomic broadcast is a second example, where
consensus is applied for ensuring totally ordered re-
liable communication (for instance, the solution pre-
sented in (Chandra and Toueg, 1996) shows that each
of these problems; i.e., consensus and atomic broad-
cast, can be reduced to the other). Many depend-
able applications use a Group Communication System
(GCS) (Chockler et al., 2001) in order to deal with re-
liable communication. So, the logging requirements
could be set on such basic building block. This leads
to the third scenario where message logging makes
sense: data replication. In this case, data has usu-
ally been replicated following the sequential (Lam-
port, 1979) consistency model, but when messages
are not logged in the GCS layer, some of them could
be lost (e.g., in case of failures) and inconsistencies
might arise.
At a glance, logging broadcast messages at deliv-
∗
This work has been partially supported by EU FEDER
and the Spanish MICINN under grant TIN2009-14460-
C03.
ery time introduces a non-negligible overhead. But
such cost mainly depends on the way such message
logging is done and on the network bandwidth/latency
and the secondary storage device’s access time. Note
that reliable broadcast protocols with safe delivery
(Moser et al., 1994) need multiple rounds of mes-
sages in order to guarantee all their delivery proper-
ties and that message logging can be completed in
the meantime. Safe delivery implies that if any pro-
cess in a group delivers a message m, then m has
been received and will be delivered by every other
process in that group unless such other destinations
fail. Nowadays, there are some scenarios where writ-
ing data to secondary storage requires a shorter in-
terval than transmitting these same data through the
network. For instance, collaborative applications be-
ing executed in laptops have access to slow wireless
networks (e.g., up to 54 Mbps for 802.11g, and 248
Mbps with 802.11n wireless networks) and could also
have access to fast flash memories in order to log such
messages being delivered (e.g., current Compact-
Flash memory cards have write-throughput up to 360
Mbps). Even when regular (i.e., non-mobile) comput-
ers are considered, commonly using a 1Gb-Ethernet
LAN, a complementary battery-backed DDR-based
disk (Texas Memory Systems, Inc., 2008) can be pur-
chased in order to log such messages while they are
being received. So, in such cases the overhead being
introduced will not be high.
111
de Juan-Marín R., D. Muñoz-Escoí F., Enrique Armendáriz-Íñigo J. and R. González de Mendívil J. (2010).
THE OVERHEAD OF SAFE BROADCAST PERSISTENCY.
In Proceedings of the 5th International Conference on Software and Data Technologies, pages 111-120
DOI: 10.5220/0002915201110120
Copyright
c
SciTePress

This paper analyses the costs introduced by the
need of logging messages. In some of the eldest sys-
tems, surveyed in (Elnozahy et al., 2002), such per-
sisting actions were applied at both sender and re-
ceiver sides, but they required complex garbage col-
lection techniques. Modern approaches have moved
such persisting actions to the receiver side, and we
will centre our study in this latter case showing that,
besides implying a negligible cost in some settings,
this also introduces some relevant advantages when
relaxed consistency is considered. The main pa-
per contribution is to show that broadcast persistency
could make sense if an appropriate logging device is
chosen and that, in such context, recovery protocols
for relaxed replica consistency models (that might be-
come common when scalability is requested) can be
easily implemented in systems guaranteeing virtual
synchrony.
The rest of this paper is structured as follows. Sec-
tion 2 summarises the assumed system model. Sec-
tion 3 describes when messages should be persisted
and in which kind of broadcast protocols such persis-
tency step makes sense, whilst Section 4 presents the
advantages provided by such persisting actions. Sec-
tion 5 analyses the performance overhead involved in
logging messages at delivery time. Later, Section 6
presents some related work. Finally, Section 7 con-
cludes the paper.
2 SYSTEM MODEL
We assume a distributed system where a replicated
set of persistent data is being managed by at least
one dependable application. So, this section de-
scribes the regular model being followed in such kind
of systems. To begin with, such distributed system
is asynchronous and complemented with some un-
reliable failure detection mechanism (Chandra and
Toueg, 1996) needed for implementing its member-
ship service. Each system process has a unique iden-
tifier. The state of a process p (state(p)) consists of a
stable part (st(p)) and a volatile part (vol(p)). A pro-
cess may fail and may subsequently recover with its
stable storage intact. Processes may be replicated. In
order to fully recover a replicated process p, we need
to update its st(p), ensuring its consistency with the
stable state of its other replicas.
A GCS is also assumed, providing virtual syn-
chrony to the applications built on top of it. Modern
GCSs are view-oriented; i.e., besides message multi-
casting they also manage a group membership service
and ensure that messages are delivered in all system
processes in the same view (set of processes provided
as output by the membership service).
Regarding failures, a crash recovery with partial
amnesia (Cristian, 1991) failure model is assumed;
i.e., processes may recover once they have crashed
(crash recovery) and they are still able to maintain
part of its state (indeed, their stable part), but not all
(they lose their volatile part: partial amnesia). Addi-
tionally, processes do not behave outside their spec-
ifications when they remain active (Schlichting and
Schneider, 1983).
3 PERSISTING BROADCAST
MESSAGES
Dependable applications need to ensure the availabil-
ity of their data. To this end, a recoverable fail-
ure model may be assumed. When the data be-
ing managed is large, typical applications as repli-
cated databases (Holliday, 2001; Jim
´
enez et al., 2002;
Kemme et al., 2001) usually rely on reliable broad-
casts with safe delivery (Moser et al., 1994) in order
to propagate updates among replicas. Safe delivery
means that if any process delivers a broadcast mes-
sage m, then m has been received and will be deliv-
ered by every other process, unless they fail. This im-
plies that, in order to deliver each message, its desti-
nation processes should know that it has been already
received in (some of) the other destination processes.
Thus, in our system we will assume that messages
need to be persisted and also they need to be safely
delivered. So, there will be two different performance
penalties:
• Messages should be persisted by the GCS be-
tween the reception and delivery steps in the re-
ceiver domain. This introduces a non-negligible
delay.
• On the other hand, safe delivery introduces the
need of an additional round of message exchange
among the receiving processes in order to deal
with message delivery, and this also penalises per-
formance.
Note, however, that the additional round only uses
small control messages; i.e., they are only acknowl-
edgements and do not carry the request or update-
propagation contents of the original message. They
may even be piggybacked in other new broadcasts,
although this does not eliminate their latency. Due
to the message size, this additional message round
can be completed faster than the contents-propagation
one in the regular case. Since our model requires that
message safety is guaranteed at the same time a mes-
sage is persisted, such extra round of messages and
ICSOFT 2010 - 5th International Conference on Software and Data Technologies
112

the write operation on stable storage may be executed
in parallel. In such case, if a process p crashes be-
fore the message is safe, such message should be dis-
carded since it will be delivered in the next view and
p will not be one of its members. So, if it was already
persisted, it has to be ignored. To this end, we might
use the following procedure, based on having a little
amount of battery-backed RAM that holds an array of
hmsg id, is safei pairs:
1. As soon as a message is received from the net-
work, its identifier is inserted in the array and its
is safe flag is set to false.
2. It is immediately written in the logging device.
3. When its safety is confirmed, its is safe flag is set
to true, and it is delivered to its target process.
4. Finally, the message is deleted from the logging
device when the application p calls the ack(p,m)
operation (that should be added to the GCS inter-
face in order to notify it when a message has been
completely processed by its intended receiver ap-
plication). When this happens, its entry in this
array is also removed.
As a result, in case of failure and recovery, all
those messages whose is safe flag is false are dubi-
ous messages and their safety should be confirmed by
the remaining correct processes in a first stage in the
recovery protocol. Note that this procedure does not
introduce any significant overhead, since it only im-
plies to write a boolean in main memory.
4 NEED OF PERSISTENCY
AND ITS BENEFITS
Consensus is a basic building block for dependable
applications. In that area, the first papers (Dolev et al.,
1997; Hurfin et al., 1998) demanded state persistence
in all cases: the involved processes should remember
which were their proposed or decided values. Later,
such a requirement was relaxed in (Aguilera et al.,
1998) proposing new types of failure detectors (con-
cretely, S
u
). Indeed there are some system config-
urations that solve consensus even when no stable
storage is available, but these configurations are more
restrictive than those demanded when stable storage
can be used. As a result, the usage of a fast logging
mechanism makes the consensus solutions more fault-
tolerant. Note that from a pragmatic point of view,
saving process proposals in stable storage is equiva-
lent to logging sent messages, whilst saving the val-
ues decided by a process is equivalent to logging a
summary of the received messages.
Consensus is a problem equivalent to total-order
(also known as atomic) broadcast. Thus, other pa-
pers (Rodrigues and Raynal, 2003; Mena and Schiper,
2005) have also used stable storage in order to imple-
ment atomic broadcast in a recoverable failure model.
According to (Mena et al., 2003) both consensus
and total order should be taken as the basis in order to
develop a reliable GCS with view-synchronous com-
munication. So, the next step consists in considering
persistence in any layer of such GCS. As a result, in
this paper we have assumed that messages are logged
once they had been received but prior to their deliv-
ery to the application process. To our knowledge, the
first paper suggesting this approach was (Keidar and
Dolev, 1996), although it did not study the overhead
implied by these persisting actions. Such message
logging is also able to provide a valid synchronisa-
tion point in order to manage the start of the recov-
ery procedure of recently joined processes. However,
in (Keidar and Dolev, 1996) only total-order broad-
casts were considered and this facilitates to set such
recovery starting point in modern replicated database
recovery protocols. On the other hand, when some
replication protocol is not based on total-order update
propagation (e.g., when a causal consistency model is
being assumed), such recovery is difficult to manage
since no correct process will be able to know which
had been the last messages received and/or processed
by that recovering replica. So, when message persis-
tency at delivery time is introduced in a GCS with
view-synchronous communication, such combination
introduces the following benefits:
• It requires logging before delivery and virtual syn-
chrony. When this is complemented with safe
delivery all processes (even those whose failure
generated the view transition) agree on the set of
messages delivered in a particular view, ensuring
thus a valid synchronisation point in order to start
recovery procedures when a process re-joins the
system. Indeed, if a node fails once it has agreed
the safe reception of a given message, but before it
delivers such message to its target process, it was
at least able to persist such message. Later, when
such node initiates its recovery it is able to de-
liver such logged message to its intended receiver
p, whose stable state st(p) is consistent (with the
state of the correct processes when they had ap-
plied the same set of messages) and that will be
able to regenerate its volatile state vol(t) from
such stable part. This scenario arises in a repli-
cated database system, for instance.
• Any kind of broadcast can be used, not necessar-
ily a total-order broadcast. We extend the contri-
butions of (Keidar and Dolev, 1996) to systems
THE OVERHEAD OF SAFE BROADCAST PERSISTENCY
113

that do not require sequential consistency (Lam-
port, 1979). For instance, our results still hold
when causal, FIFO or non-ordered reliable broad-
casts are used, combined with virtual synchrony.
This maintains the starting synchronisation points
to deal with recovery procedures.
As a result, a system S whose reliable broadcasts
provide safe delivery and persistency in the delivery
step is able to simplify a lot the recovery protocols,
since the process chosen as the source of such recov-
ery is able to know which is the set of missed mes-
sages in such recovering node, transferring them (or
their implied updates) in the recovery actions. Some
recent papers (Finkelstein et al., 2009; Helland and
Campbell, 2009) have suggested that data should be
managed in a relaxed way (i.e., with a relaxed consis-
tency model) when scalability is a must. So, S com-
plies perfectly with such requirements.
5 OVERHEAD
In a practical deployment of a system S with safe de-
livery and persistency in the delivery step, the over-
head introduced by such message logging might be
partially balanced by the additional communication
delay needed for ensuring safe delivery. So, let us as-
sume a system of this kind in this section and survey
on the sequel in which distributed settings the appli-
cations can afford the logging overhead.
In order to develop efficient reliable broadcasts,
modern GCSs have used protocols with optimistic de-
livery (Pedone and Schiper, 1998; Chockler et al.,
2001). This allows an early management of the in-
coming messages, even before their delivery order has
been set. Thus, (Rodrigues et al., 2006) propose an
adaptive and uniform total order broadcast based on
optimistic delivery and on a sequencer-based (D
´
efago
et al., 2004) protocol. In such protocol, safe deliv-
ery could be guaranteed when the second broadcast
round —used by the sequencer for spreading the mes-
sage sequence numbers— has been acknowledged by
(a majority of) the receiving nodes. We assume a pro-
tocol of this kind in this section; i.e., reception ac-
knowledgements are needed in order to proceed with
message delivery.
Although currently available servers usually have
a hard-disk drive as their common secondary storage,
it is not expensive to buy another flash-based disk, or
even a battery-backed RAM disk, as a faster message
persisting device. Thus, the variability introduced by
the head positioning step (i.e., seek time) that domi-
nates the regular disk access time is avoided. As a re-
sult, we assume that there is a second –and dedicated–
disk in each server where message logging can be
done, and such message logging can be managed in
parallel to the regular disk accesses requested by other
processes being executed in such server.
The overhead analysis starts in Section 5.1 with
the expressions and parameters used for computing
the time needed to persist the message contents and
to ensure its safe delivery. Regarding message sizes,
we have considered a database replication protocol
as an application example in our system. Section
5.2 presents multiple kinds of computer networks and
storage devices, showing the values they provide for
the main parameters identified in Section 5.1. Finally,
Section 5.3 compares the time needed for persisting
messages in the storage device with the time needed
for ensuring such safe delivery.
5.1 Persistence and Safety Costs
In order to compute the time needed to persist a mes-
sage in a storage device, the expression to be used
should consider the typical access time of such device
(head positioning and rotational delay, in case of hard
disks or simply the device latency for flash-memory
devices), its bandwidth, and the message size. In
practice, such message could be persisted in a single
operation since we could assume that it could be writ-
ten in a contiguous sequence of blocks.
On the other hand, for ensuring safe delivery, a
complete message round is needed; i.e., assuming
the sequencer-based protocol outlined above, the se-
quencer has first broadcast the intended message, that
is persisted and acknowledged by the receivers. Later,
the sequencer broadcasts its associated order num-
ber (or a reverse acknowledgement in non-total-order
broadcasts) for confirming the safety of the message.
Note that the flag is safe commented above is not set
to true until this step is executed. Once this second
broadcast is received, the message is delivered in each
destination process.
So, both delays can be computed using the follow-
ing expression:
delay = latency +
message size
bandwidth
but we should consider that the message sizes in each
case correspond to different kinds of messages. When
persistence is being analysed, such message has been
sent by the replication protocol in order to propagate
state updates (associated to the execution of an op-
eration or a transaction). So, messages of this kind
are usually big. On the other hand, for ensuring safe
delivery, the sender has been the GCS and both mes-
sages needed in such case are small control messages
(acknowledgements or sequence numbers).
ICSOFT 2010 - 5th International Conference on Software and Data Technologies
114
5.2 Latency and Bandwidth
Different storage devices and networks are available
today. So, we present their common values for the
two main parameters discussed in the previous sec-
tion; i.e., latency and bandwidth. In case of storage
devices, such second parameter considers the write
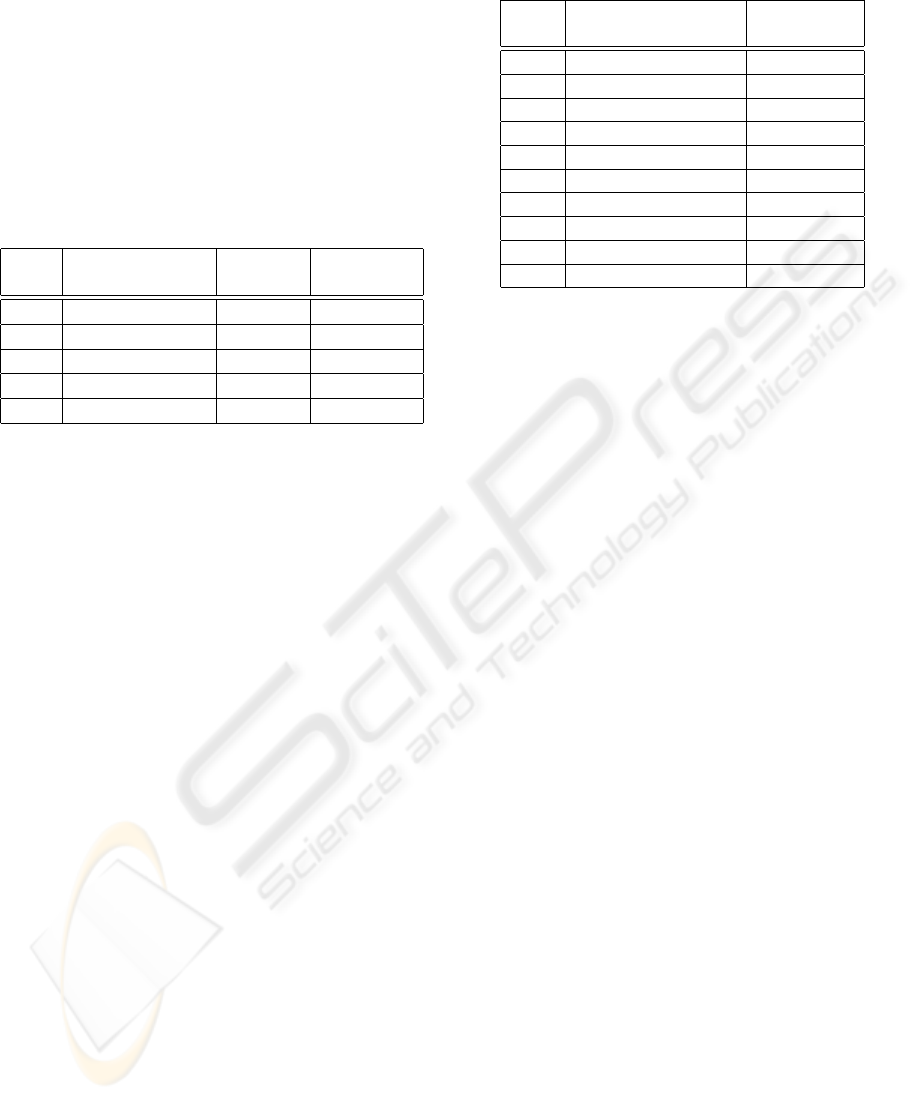
bandwidth. Such values are summarised in Table 1
for storage devices and in Table 2 for computer net-
works.
Table 1: Storage devices.
ID Device Latency Bandwidth
(sec) (Mb/s)
SD-1 SD-HC Class-6 2*10
−3
48
SD-2 CompactFlash 2*10
−3
360
SD-3 Flash SSD 0.1*10
−3
960
SD-4 SATA-300 HDD 10*10
−3
2400
SD-5 DDR-based SSD 15*10
−6
51200
In both tables, we have used a first column in order
to assign a short identifier for each one of those de-
vices. Such identifiers will be used later in Table 4 and
Figure 1. Five different kinds of storage devices have
been considered. The initial three ones are differ-
ent variants of flash memory devices. Thus, SD-HC
Class-6 refers to such kind of memory cards, where
its bandwidth corresponds to the minimal sustained
write transfer rate in those cards. The third row cor-
responds to one of the currently available flash-based
Solid State Disks (the Imation S-Class Series (Ima-
tion Corp., 2009)), whilst the fifth one refers to SSDs
based on battery-backed DDR2 memory (concretely,
such values correspond to a disk based on PC2-6400
DDR2 memory, but there are faster memories nowa-
days). Note that there are some other commercially
available SSD disks that combine these two last tech-
nologies and that are able to provide a flash write
bandwidth quite close to the latter, or even better.
For instance, the Texas Memory Systems’ RamSan-
500 SSD was available in 2008 providing a write
bandwidth of 16 Gbps (Texas Memory Systems, Inc.,
2008), whilst its RamSan-620 SSD variant is able to
reach a write bandwidth of 24 Gbps (Texas Memory
Systems, Inc., 2009) in October 2009, that might be
also clustered in order to build the RamSan-6200 SSD
with a global write bandwidth of 480 Gbps.
Note that device SD-4 (a regular hard-disk drive)
is only included for completion purposes, but it will
never be a recommendable device. Note also that we
have not considered seek time in our theoretical eval-
uation and that even with this favour, its performance
is not acceptable, as it will be seen in Table 4.
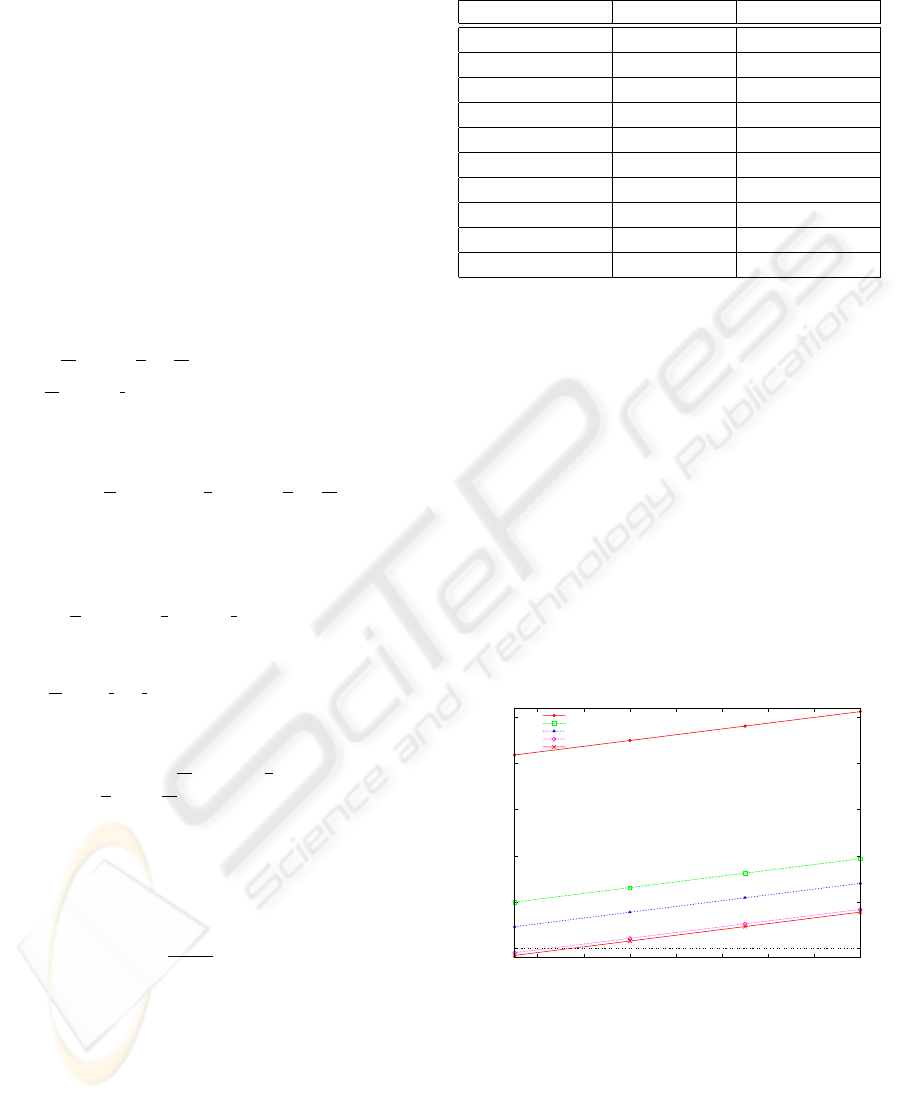
Table 2 shows bandwidths for different kinds of
Table 2: Phone interfaces and computer networks.
ID Interface/Network Bandwidth
(Mb/s)
N-1 HSDPA 14.4
N-2 HSPA+ 42
N-3 802.11g 54
N-4 802.16 (WiMAX) 70
N-5 Fast Ethernet 100
N-6 802.11n 248
N-7 Gigabit Ethernet 1000
N-8 Myrinet 2000 2000
N-9 10G Ethernet 10000
N-10 SCI 20000
computer/phone networks. No latencies have been
presented there. In any network there is a delivery
latency related to interrupt processing in the receiv-
ing node. Besides such delivery latency there will be
another one related to data transmission, but this is
mainly distance-dependent. In order to consider the
worst-case scenario for a persistence-oriented system,
we would assume for such second latency that infor-
mation can be transferred at the speed of light and that
as a result, it is negligible for short distances, and that
the first one —interrupt processing— needs around
15 µs although such time is highly variable and de-
pends on the supported workload and scheduling be-
haviour of the underlying operating system. Due to
this, we will vary later the values of this parameter
from 5 to 20 µs, analysing its effects on the size of
the messages that could be logged without introduc-
ing any overhead. Additionally, there will be other la-
tencies related to routing or being introduced by hubs
or switches if they were used, although we do not in-
clude such cases in this analysis; i.e., we are interested
in the worst-case scenario, proving that our logging
proposal is interesting even in that case.
5.3 Persistence Overhead
Looking at the data shown in Tables 1 and 2, and the
latency than can be assumed for interrupt processing
in network-based communication, it is clear that stor-
age times will be longer than network transfers except
when a DDR-based SSD storage device (i.e., the SD-
5 one) is considered.
Let us start with a short discussion of this last case.
Note that the control messages needed for ensuring
safe message delivery are small. Let us assume that
their size is 1000 bits (that size is enough for hold-
ing the needed message headers, tails and their in-
tended contents; i.e., two long integers: one for the
identifier of the message being sequenced and another
THE OVERHEAD OF SAFE BROADCAST PERSISTENCY
115
for its assigned sequence number). Assuming that
the interrupt processing demands 15 µs, the total time
needed for a round-trip message exchange consists of
30 µs devoted to interrupt management and the time
needed for message reception assuming the band-
widths shown in Table 2. Note that such latter time
corresponds to a 2000-bit transferral, since we need
to consider the delivery of two control messages (one
broadcast from the sequencer to each group member
and a second one acknowledging the reception of such
sequencing message). Moreover, such cost would be
multiplied by the number of additional processes in
the group (besides the sequencer), although we will
assume a 2-process group in order to consider the
worst-case scenario for the persisting approach.
So, using the following variables and constants:
• nbw: Network bandwidth (in Mbits/second).
• nl: Network latency (in seconds). As already dis-
cussed above, we assume a latency of 15*10
−6
seconds per message in the rest of this document,
except in Figure 1.
• psbw: Persistent storage bandwidth (in
Mbits/second). In this case, the single de-
vice (DDR-based SSD) of this kind that we are
considering provides a value of 51.2*10
3
for this
parameter.
• psl: Persistent storage latency (in seconds).
Again, a single device has been considered, with
a value of 15*10
−6
for this parameter.
• rtt: Round-trip time for the control messages (as-
sumed size: 1000 bit/msg) that ensure safe deliv-
ery.
we could compute the maximum size of the broad-
cast/persisted update messages (msum, expressed in
KB) that does not introduce any performance penalty
(i.e., that can be persisted while the additional control
messages are transferred) using the following expres-
sions (being 0.002 the size of the two control mes-
sages, expressed also in Mbits):
rtt =
0.002
nbw
+ 2 ∗nl
msum = (rtt − psl) ∗ psbw ∗ 1000/8
So, for each one of the computer/phone networks
depicted in Table 2 the resulting values for those two
expressions have been summarised in Table 3.
As it can be seen, all computed values provide
an acceptable update message size using this kind of
storage device (i.e., the SD-5 one). In the worst case,
with the most performant network, 96.64 KB update
messages could be persisted without introducing any
Table 3: Maximum persistable message sizes.
Network rtt (sec) Msg. size (KB)
HSDPA 168.88*10
−6
984.89
HSPA+ 77.62*10
−6
400.76
802.11g 67.04*10
−6
333.04
802.16 (WiMAX) 58.57*10
−6
278.86
Fast Ethernet 50*10
−6
224
802.11n 38.06*10
−6
147.61
Gb Ethernet 32*10
−6
108.8
Myrinet 2000 31*10
−6
102.4
10G Ethernet 30.2*10
−6
97.28
SCI 30.1*10
−6
96.64
noticeable overhead. This size is far larger than the
one usually needed in database replication protocols
(less than 4 KB), as reported in (Vandiver, 2008). In
the best case, such size could reach almost 1 MB. This
is enough for most applications. So, logging is afford-
able when a storage device of this kind is used for the
message persisting tasks at delivery time.
Note, however, that these computed message sizes
depend a lot on the interrupt processing time that we
have considered as an appropriate value for the nl
(network latency) parameter. So, Figure 1 shows the
resulting maximum persistable message sizes when
such nl parameter is varied from 5 to 20 µs. As we
can see, when the interrupt processing time exceeds
7.8 µs, the SD-5 storage device does not introduce any
overhead, even when it is combined with the fastest
networks available nowadays.
0
200
400
600
800
1000
6 8 10 12 14 16 18 20
Message Size (KB)
Interrupt Processing Time (microsec)
N-1
N-3
N-5
N-7
N-10
Figure 1: Maximum persistable message sizes.
Let us discuss now which will be the additional
time (exceeding the control messages transfer time;
recall that such messages ensure message delivery
safety) needed in the persisting procedure, in order
to log the delivered update messages in the system
nodes. Such update message sizes do not need to
be excessively large. For instance, (Vandiver, 2008,
page 130) reports that the average writeset sizes in
ICSOFT 2010 - 5th International Conference on Software and Data Technologies
116
PostgreSQL for transactions being used in the stan-
dard TPC-C benchmark (Transaction Processing Per-
formance Council, 2007) are 2704 bytes in the largest
case. When a transaction requests commitment, reg-
ular database replication protocols need to broadcast
the transaction ID and writeset. So, we will assume
update messages of 4 KB (i.e, 0.032 Mbits) and the
following expressions will provide such extra time
(pot, persistence overhead time) introduced by the
persistence actions:
pot = psl +
0.032
psbw
− rtt
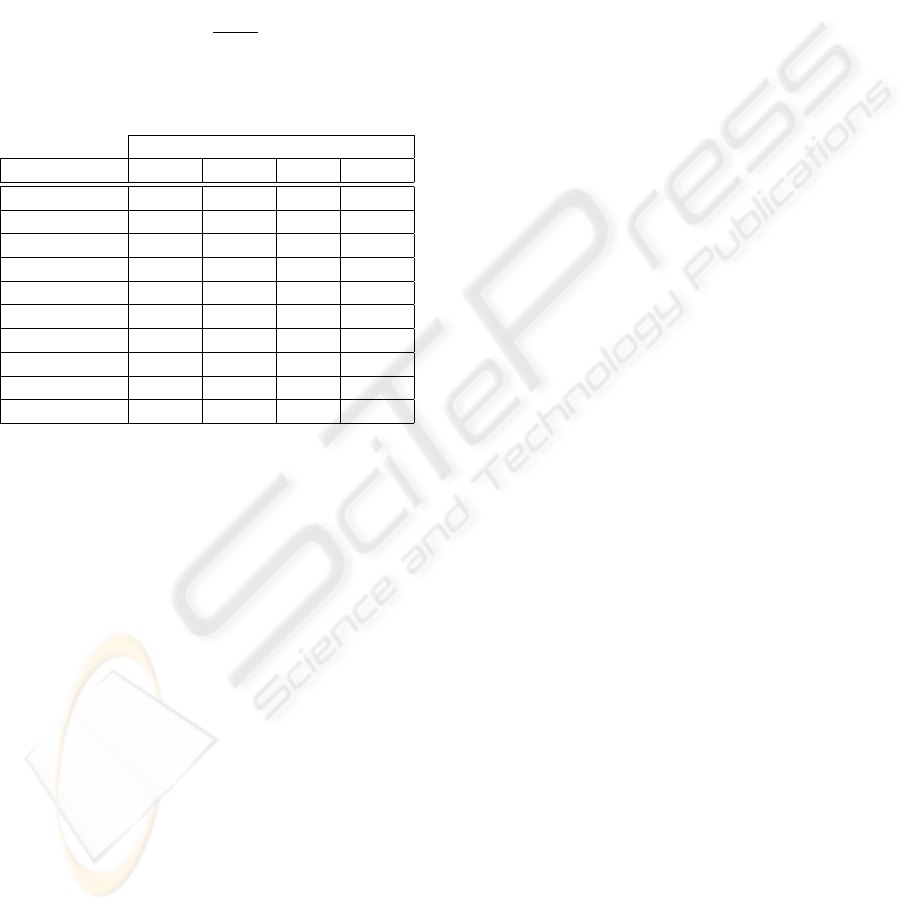
Table 4: Persistence overhead in low-bandwidth storage de-
vices (in µs/msg).
Storage Devices
Network SD-1 SD-2 SD-3 SD-4
HSDPA 2497.8 1920 -35.6 9844.4
HSPA+ 2589.0 2011.3 55.7 9935.7
802.11g 2599.6 2021.9 66.3 9946.3
802.16 2608.1 2030.3 74.8 9954.8
Fast Ethernet 2616.7 2038.9 83.3 9963.3
802.11n 2628.6 2050.8 95.3 9975.3
Gb Ethernet 2634.7 2056.9 101.3 9981.3
Myrinet 2000 2635.7 2057.9 102.3 9982.3
10G Ethernet 2636.5 2058.7 103.1 9983.1
SCI 2636.6 2058.8 103.2 9983.3
We summarise all resulting values (for each one of
the remaining storage devices) in Table 4. In the best
device (SD-3; i.e., a fast flash-based SSD drive), it
lasts 103.2 µs using the best available network. This
means that we need an update arrival rate of 9615.4
msg/s in order to saturate such device using such
fast network. However, using the worst network, no
persistence overhead is introduced (it is able to per-
sist each update message 35.6 µs before the control
messages terminate the safe delivery). On the other
hand, some of these devices generate a non-negligible
overhead (i.e., they can saturate the persisting ser-
vice) when update propagation rates exceed moder-
ately high values (e.g., 400 msg/s using SD-1 or SD-2
devices, and 100 msg/s for SD-4 ones; i.e., flash mem-
ory cards and SATA-300 HDD, respectively). As a re-
sult of this, we consider that the SD-3 device provides
also an excellent compromise between the overhead
being introduced and the availability enhancements
that logging ensures, and that even the SD-1 and SD-2
devices could be accepted for moderately loaded ap-
plications. This proves that logging can be supported
today in common reliable applications that assume a
recoverable failure model.
6 RELATED WORK
The need of message logging was first researched in
the context of rollback-recovery protocols (Strom and
Yemini, 1985; Koo and Toueg, 1987; Elnozahy et al.,
2002) for distributed applications. In such scope, pro-
cesses (that do not need to be part of a replicated
server) need to checkpoint their state in stable stor-
age and, when failures arise, the recovering process
should rollback its state to its latest checkpointed
state, perhaps compelling other processes to do the
same. In order to reduce the need of rolling back the
state of surviving processes, state needs to be check-
pointed when a non-deterministic event happens, al-
lowing thus the re-execution of deterministic code in
the recovering steps. When communication is quasi-
reliable, this leads to taking state checkpoints when
processes send messages to other remote processes,
combined with message logging at the receiving pro-
cesses. Garbage collection is an issue in this kind of
systems since each process may interact with many
others and such logging release will depend on that
set of previously contacted processes.
The first paper that presented the need of mes-
sage logging as a basis for application recoverabil-
ity in a group communication system —concretely,
Psync— was (Peterson et al., 1989). Psync provided
a mechanism integrated in the GCS that was able to
ensure causal message delivery, and recovery support,
whilst policies could be set by the applications using
the GCS, adapting such mechanisms to their concrete
needs. For instance, total order broadcast could be
easily implemented as a re-ordering policy at appli-
cation level. However, its recovery support (Peterson
et al., 1989) demanded a lot of space in case of long
executions and did not guarantee a complete recov-
ery (i.e., messages could be lost) in case of multiple
process failures.
(Aguilera et al., 1998) proved that logging is also
needed for solving consensus in some system config-
urations where the crash-recovery model is assumed.
This implies that many other dependable solutions
based on consensus –e.g., atomic broadcast– do also
need to persist messages. Indeed, the Paxos proto-
col (Lamport, 1998) presented also a similar result,
although applied to implement an atomic broadcast
based on consensus. It gives as synchronisation point
the last decision —delivered message— written —
i.e., applied— in a learner. This approach provides
a recovery synchronisation point. It forces the accep-
tors that participate in the quorum for a consensus
instance to persist their vote —message to order—
as previous step to the conclusion of such consen-
sus instance —which will imply the delivery of the
THE OVERHEAD OF SAFE BROADCAST PERSISTENCY
117

message—. So, if a learner crashes losing some deliv-
ered messages, when it reconnects it asks the system
to run again the consensus instances subsequent to the
last message it had applied, relearning then the mes-
sages that the system has delivered afterwards. This
forces the acceptors to hold the decisions adopted for
long, till all learners acknowledge the correct process-
ing of the message.
Different systems have been developed using the
basic ideas proposed in (Lamport, 1998). Sprint (Ca-
margos et al., 2007) is an example of this kind. It
supports both full and partial replication using in-
memory databases for increasing the performance
of the replicated system, and it uses a Paxos-based
mechanism for update propagation.
Other papers have dealt with logging messages at
their receiving side, according to the principles set in
(Aguilera et al., 1998; Lamport, 1998). Thus, (Mena
and Schiper, 2005) specify atomic broadcast when
a crash-recovery model is assumed. Such specifi-
cation adds a commit operation that persists the ap-
plication state, and synchronises the application and
GCS state, providing thus a valid recovery-start point.
Their strategy adapts the amount of checkpoints being
made by a process to the semantics of the applica-
tion being executed, and this can easily minimise the
checkpointing effort. Logging was also used in (Ro-
drigues and Raynal, 2003) in order to specify atomic
broadcast in the crash-recovery model.
A typical application that relies on a view-based
GCS and assumes crash-recovery and primary-com-
ponent-membership models is database replication.
Multiple replicated database recovery protocols exist
(Holliday, 2001; Kemme et al., 2001; Jim
´
enez et al.,
2002) and regularly they do not rely on virtual syn-
chrony in order to manage such recovery. Instead,
practically all of them use atomic broadcast as the up-
date propagation mechanism among replicas (Wies-
mann and Schiper, 2005) and can persistently main-
tain which was the last update message applied in
each replica. Unfortunately, this might lead to lost
transactions in some executions where a sequence of
multiple failures arise (de Juan-Mar
´
ın et al., 2008).
(Wiesmann and Schiper, 2004) analyses which
have been the regular safety criteria for database repli-
cation (Gray and Reuter, 1993) (1-safe, 2-safe and
very safe), and compared them with the safety guar-
antees provided by current database replication proto-
cols based on atomic broadcast (named group-safety
in their paper). Their paper shows that group-safety
is not able to comply with a 2-safe criterion, since up-
date reception does not imply that such updates have
been applied to the database replicas. As a result, they
propose an end-to-end atomic broadcast that is able
to guarantee the 2-safe criterion. Such end-to-end
atomic broadcast consists in adding an ack(m) oper-
ation to the interface provided by the GCS that should
be called by the application once it has processed and
persisted all state updates caused by message m. This
implies that the sequence of steps in an atomically-
broadcast message processing should be:
1. A-send(m). The message is atomically broadcast
by a sender process.
2. A-receive(m). The message is received by each
one of the group-member application processes.
In a traditional GCS, this sequence of steps termi-
nates here.
3. ack(m). Such target application processes use this
operation in order to notify the GCS about the ter-
mination of the message processing. As a result,
all state updates have been completed in the tar-
get database replica and the message is considered
successfully delivered. The GCS is compelled to
log the message in the receiver side until this step
is terminated. Thus, the GCS can deliver again
such message at recovery time if the receiving
process has crashed before acknowledging its suc-
cessful processing.
This last paper also ensures that messages have
persisted their effects before they can be forgotten.
Previous papers (Keidar and Dolev, 1996) proposed
that messages were persisted at delivery time in a
GCS providing virtual synchrony (Birman, 1994), as
assumed in Section 5 and that they were logged until
the application had processed them. In this workline,
(Fekete et al., 1997) presents a specification for par-
titionable group communication service providing re-
coverability, but they do not mention the necessity of
persistence.
Our proposal resembles those of (Keidar and
Dolev, 1996) and (Wiesmann and Schiper, 2004) al-
though we do not consider that total-order is manda-
tory. Logging could be added to any kind of reliable
broadcast, providing thus support for more relaxed
consistency models.
Logging has been also a technique for providing
fault tolerance in middleware servers (Wang et al.,
2007). Its authors comment that two common tech-
niques for providing high availability in these servers
are: replication and log-based recovery.
In regard to the replication solution they explain
that it implies to duplicate the infrastructure and intro-
duces a relative overhead due to the communications
that must be performed between replicated servers but
avoid outages completely. They propose in this paper
a log-based recovery for saving the middleware state
–session and shared variables– when a crash occurs.
ICSOFT 2010 - 5th International Conference on Software and Data Technologies
118

They argue that it is a relatively cheap technique. As
the servers can work in a collaborative way, when a
server crashes and recovers, later other –non failed–
servers of the same service domain must check if their
state is consistent with the state reached after the re-
covery in the crashed server. The idea is to provide
inter-server consistency avoiding orphan messages.
This can imply sometimes a roll-back process in a
non crashed server for ensuring the inter-server con-
sistency.
So, on one hand, they use optimistic logging; i.e.,
between the servers inside a domain service. Some-
times, after a recovery, some sessions of non-crashed
servers can become orphans (i.e., they are inconsis-
tent) in regard to the state reached in the recovered
node. Therefore, these orphan sessions must be rolled
back to avoid inconsistencies. On the other hand,
when pessimistic logging is used –communications
outside the service boundaries–, orphans can not be
created because messages are flushed before generat-
ing an event that can become orphan. So, after a re-
covery process, inconsistencies can not appear among
servers in different service domains.
7 CONCLUSIONS
Message logging has been a requirement in recover-
able failure models for years in order to solve some
problems like consensus, but it has been always con-
sidered as an expensive effort. When such logging
step is implemented in a GCS providing virtual syn-
chrony, the recovery tasks can also be simplified, even
when relaxed consistency models are used and each
replica applies a given set of updates in an order dif-
ferent to that being used in other replicas.
This paper uses a simple analytical model in order
to study the costs implied by such logging tasks and
it shows that they do not introduce a noticeable delay
when a fast-enough storage system is used. In fact,
the access time requirements for such logging device
will depend on the communications load and the net-
work bandwidth. This provides an encouraging first
step towards further experimental evaluations using
real logging devices that could confirm the viability
of these persisting actions.
REFERENCES
Aguilera, M. K., Chen, W., and Toueg, S. (1998). Failure
detection and consensus in the crash-recovery model.
In 12th Intnl. Symp. on Dist. Comp. (DISC), pages
231–245, Andros, Greece.
Birman, K. P. (1994). Virtual synchrony model. In Bir-
man, K. P. and van Renesse, R., editors, Reliable Dis-
tributed Computing with the Isis Toolkit, chapter 6,
pages 101–106. IEEE-CS Press.
Camargos, L., Pedone, F., and Wieloch, M. (2007). Sprint:
a middleware for high-performance transaction pro-
cessing. SIGOPS Oper. Syst. Rev., 41(3):385–398.
Chandra, T. D. and Toueg, S. (1996). Unreliable failure
detectors for reliable distributed systems. J. ACM,
43(2):225–267.
Chockler, G. V., Keidar, I., and Vitenberg, R. (2001).
Group communication specifications: A comprehen-
sive study. ACM Comput. Surv., 33(4):1–43.
Cristian, F. (1991). Understanding fault-tolerant distributed
systems. Communications of the ACM, 34(2):56–78.
de Juan-Mar
´
ın, R., Ir
´
un-Briz, L., and Mu
˜
noz-Esco
´
ı, F. D.
(2008). Ensuring progress in amnesiac replicated sys-
tems. In 3rd Intnl. Conf. on Availability, Reliabil-
ity and Security (ARES), pages 390–396, Barcelona,
Spain. IEEE-CS Press.
D
´
efago, X., Schiper, A., and Urb
´
an, P. (2004). Total order
broadcast and multicast algorithms: Taxonomy and
survey. ACM Comput. Surv., 36(4):372–421.
Dolev, D., Friedman, R., Keidar, I., and Malkhi, D. (1997).
Failure detectors in omission failure environments. In
16th Annual ACM Symp. on Principles of Dist. Comp.
(PODC), page 286, Santa Barbara, CA, USA.
Elnozahy, E. N., Alvisi, L., Wang, Y.-M., and Johnson,
D. B. (2002). A survey of rollback-recovery proto-
cols in message-passing systems. ACM Comput. Surv.,
34(3):375–408.
Fekete, A., Lynch, N. A., and Shvartsman, A. A. (1997).
Specifying and using a partitionable group communi-
cation service. In PODC, pages 53–62.
Finkelstein, S., Brendle, R., and Jacobs, D. (2009). Princi-
ples for inconsistency. In 4th Biennial Conf. on Inno-
vative Data Systems Research (CIDR), Asilomar, CA,
USA.
Gray, J. and Reuter, A. (1993). Transaction Processing:
Concepts and Techniques. Morgan Kaufmann, San
Mateo, CA, USA.
Helland, P. and Campbell, D. (2009). Building on quick-
sand. In 4th Biennial Conf. on Innovative Data Sys-
tems Research (CIDR), Asilomar, CA, USA.
Holliday, J. (2001). Replicated database recovery using
multicast communication. In Intnl. Symp. on Network
Computing and its Applications (NCA), pages 104–
107, Cambridge, MA, USA.
Hurfin, M., Most
´
efaoui, A., and Raynal, M. (1998). Con-
sensus in asynchronous systems where processes can
crash and recover. In 17th Symp. on Reliable Dist. Sys.
(SRDS), pages 280–286, West Lafayette, IN, USA.
Imation Corp. (2009). S-class solid state drives. Ac-
cessible at http://www.imation.com/en/Imation-
Products/Solid-State-Drives/S-Class-Solid-State-
Drives/.
THE OVERHEAD OF SAFE BROADCAST PERSISTENCY
119

Jim
´
enez, R., Pati
˜
no, M., and Alonso, G. (2002). An algo-
rithm for non-intrusive, parallel recovery of replicated
data and its correctness. In Intnl. Symp. on Reliable
Distributed Systems (SRDS), pages 150–159, Osaka,
Japan. IEEE-CS Press.
Keidar, I. and Dolev, D. (1996). Efficient message ordering
in dynamic networks. In 15th Annual ACM Symp. on
Principles of Distributed Computing (PODC), pages
68–76, Philadelphia, Pennsylvania, USA.
Kemme, B., Bartoli, A., and Babaoglu,
¨
O. (2001). Online
reconfiguration in replicated databases based on group
communication. In Intnl. Conf. on Dependable Sys-
tems and Networks (DSN), pages 117–130, G
¨
oteborg,
Sweden.
Koo, R. and Toueg, S. (1987). Checkpointing and rollback-
recovery for distributed systems. IEEE Trans. Soft-
ware Eng., 13(1):23–31.
Lamport, L. (1979). How to make a multiprocessor com-
puter that correctly executes multiprocess programs.
IEEE Trans. Computers, 28(9):690–691.
Lamport, L. (1998). The part-time parliament. ACM Trans.
Comput. Syst., 16(2):133–169.
Mena, S. and Schiper, A. (2005). A new look at
atomic broadcast in the asynchronous crash-recovery
model. In Intnl. Symp. on Reliable Distributed Sys-
tems (SRDS), pages 202–214, Orlando, FL, USA.
IEEE-CS Press.
Mena, S., Schiper, A., and Wojciechowski, P. T. (2003). A
step towards a new generation of group communica-
tion systems. In ACM/IFIP/USENIX Intnl. Middle-
ware Conf., pages 414–432, Rio de Janeiro, Brazil.
Moser, L. E., Amir, Y., Melliar-Smith, P. M., and Agar-
wal, D. A. (1994). Extended virtual synchrony. In
Intnl. Conf. on Distr. Comp. Sys. (ICDCS), pages 56–
65, Poznan, Poland. IEEE-CS Press.
Pedone, F. and Schiper, A. (1998). Optimistic atomic broad-
cast. In 12th Intnl. Symp. on Distributed Computing
(DISC), pages 318–332, Andros, Greece. Springer.
Peterson, L. L., Buchholz, N. C., and Schlichting, R. D.
(1989). Preserving and using context information in
interprocess communication. ACM Trans. Comput.
Syst., 7(3):217–246.
Rodrigues, L., Mocito, J., and Carvalho, N. (2006). From
spontaneous total order to uniform total order: dif-
ferent degrees of optimistic delivery. In ACM Symp.
on Applied Computing (SAC), pages 723–727, Dijon,
France. ACM Press.
Rodrigues, L. and Raynal, M. (2003). Atomic broadcast
in asynchronous crash-recovery distributed systems
and its use in quorum-based replication. IEEE Trans.
Knowl. Data Eng., 15(5):1206–1217.
Schlichting, R. D. and Schneider, F. B. (1983). Fail-stop
processors: An approach to designing fault-tolerant
systems. ACM Trans. Comput. Syst., 1(3).
Strom, R. E. and Yemini, S. (1985). Optimistic recovery
in distributed systems. ACM Trans. Comput. Syst.,
3(3):204–226.
Texas Memory Systems, Inc. (2008). RamSan-500 SSD
Details. Accessible at http://www.superssd.com/
products/ramsan-500/.
Texas Memory Systems, Inc. (2009). RamSan-
620 SSD Technical Specs. Accessible at
http://www.superssd.com/products/ramsan-620/.
Transaction Processing Performance Council (2007). TPC
benchmark C, standard specification, revision 5.9.
Downloadable from http://www.tpc.org/tpcc/.
Vandiver, B. M. (2008). Detecting and Tolerating Byzantine
Faults in Database Systems. PhD thesis, Computer
Science and Artifical Intelligence Laboratory, Mas-
sachusetts Institute of Technology, Cambridge, MA,
USA.
Wang, R., Salzberg, B., and Lomet, D. (2007). Log-based
recovery for middleware servers. In ACM SIGMOD
Intnl. Conf. on Management of Data, pages 425–436,
New York, NY, USA.
Wiesmann, M. and Schiper, A. (2004). Beyond 1-safety
and 2-safety for replicated databases: Group-safety.
Lecture Notes in Computer Science, 2992:165–182.
Wiesmann, M. and Schiper, A. (2005). Comparison of
database replication techniques based on total order
broadcast. IEEE Trans. Knowl. Data Eng., 17(4):551–
566.
ICSOFT 2010 - 5th International Conference on Software and Data Technologies
120
