
PALMPRINT RECOGNITION BASED ON REGIONS SELECTION
Salma Ben Jemaa
Higher Institute of Computer and Multimedia, Sfax University, Tunis Street, Sfax, Tunisia
Mohamed Hammami
Faculty of Sciences, Sfax University, Sokra Street, Sfax, Tunisia
Keywords:
Palmprint recognition, Biometric, Contactless, Local Binary Pattern (LBP), Sequential Forward Floating Se-
lection (SFFS).
Abstract:
Palmprint recognition, as a reliable personal identity method, has been received increasing attention and be-
come an area of intense research during recent years. In this paper, we propose a generic biometric system
that can be adopted with or without contact depending of the capture system to ensure public security based on
identification with palmprint. This system is based on a new global approach which is to focus only on areas
of the image having the most discriminating features for recognition. Experimental results have been under-
taken on two large databases, namely,“CASIA-Palmprint” and “PolyU-Palmprint” show promising result and
demonstrate the effectiveness of the proposed approach.
1 INTRODUCTION
The progress in informatics field, the development of
common operations as well as the recent threats ter-
ritories have naturally led the subject of security for
a reliable identification of persons. Recently, biomet-
rics has been emerging as a new and effective identifi-
cation technology. In the biometrics family, palmprint
is new but promising member. Palmprint characteris-
tics are relatively stable, unique and the hand present
high user acceptability. Usually, palmprint biometrics
require contact with the capture system, therefore, all
the users are obliged to touch the same glass. For
this reason some users refuse to put their hand on the
same plate for hygienic reasons. Recently, few studies
(Doublet et al., 2007) (Goh et al., 2008) are interested
in making it more comfortable and more hygienic by
removing the requirement of contact. Although palm-
print is relatively a new biometric technology, a num-
ber of interesting approaches in this field have been
proposed in the literature over ten years ago. There
are mainly two categories of approaches to palmprint
recognition. The first category is the structural ap-
proaches such as based on the principal lines (Wu
et al., 2004), wrinkles (Chen et al., 2001), ridges and
features point (Duta et al., 2002). Unfortunately, it
is difficult to get a good recognition rate while using
only the principal lines because of their resemblance
among different individuals. Besides, wrinkles and
ridges of the palm are always crossing and overlap-
ping each other, which complicates the features ex-
traction task. The second category is the global ap-
proaches, such as Gabor filters (Zhang et al., 2003),
Eigenpalm (Lu et al., 2003), Fisherpalms (Wu et al.,
2003), Fourier transform (Li et al., 2002), Various in-
variant moments (Kan and Srinath, 2002), Morphol-
ogy operation (Wu et al., 2004) (Han et al., 2003) and
Local Binary Pattern (Wang et al., 2006). The global
approach is proved to be the most efficient in the liter-
ature, therefore, it could be used efficiently for palm-
print recognition. Previous researchers mostly use the
entire area of the palmprint as input to the recognition
algorithm. The main contribution of this work is to
focus only on areas of the image having the most dis-
criminating features for recognition to propose a bio-
metric system for contactless applications.
The remainder of this paper is organized as fol-
lows: Section 2 describes the proposed palmprint
recognition system. Section 3 presents some experi-
ments and results to show the effectiveness of the pro-
posed approach. Finally, Section 4 summarizes the
main results and offers concluding remarks.
320
Ben Jemaa S. and Hammami M..
PALMPRINT RECOGNITION BASED ON REGIONS SELECTION.
DOI: 10.5220/0003317803200325
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2011), pages 320-325
ISBN: 978-989-8425-47-8
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

2 THE PROPOSED SYSTEM
The proposed biometric recognition system is com-
posed of four steps: (1) preprocessing (2) features ex-
traction (3) features selection and finally (4) matching
and decision making.
2.1 Preprocessing
The goal of preprocessing is to robustly locate the Re-
gion Of Interest (ROI) of palm. In our case, the pre-
processing step consist of three phases. First, we start
with a detection phase of hand image, followed by a
ROI extraction phase and finally a ROI preprocessing
phase.
2.1.1 Hand Detection
First of all, the palmprint image is rotated 90
◦
in
clockwise direction. Next, the image is segmented
into foreground and background using the Otsu’s
method (Otsu, 1979). They can be some fingers dis-
connected from the hand for the users wearing some
rings. Thus, we use morphology operations to resolve
this problem and to fill any holes which might even-
tually be present in the foreground and background of
the segmented image. Finally, the binary images are
drawn to obtain the contours of hand shape by mak-
ing use of the border tracing algorithm (Shapiro and
Stockman, 2001).
2.1.2 Region of Interest (ROI) Extraction
To extract the ROI of the palmprint image, our system
is based on the detection of the four local minima
(Finger-webs) which are focused on the hand contour.
Once these points are detected, it would be possible
to classify the hand in left hand or right hand. This
classification serves us to locate the ROI.
A. Finger-webs Determination
In order to detect the four local minima, we apply
the radial distance to a reference point technique
(Konukoglu et al., 2006). First, the middle point Wm
of where the arm or wrist region crosses the image
edge is chosen as the reference point (Konukoglu
et al., 2006) as shown in Figure 1.(a) and an Eu-
clidean distance to all the border pixels from Wm is
calculated. Then, a distance distribution diagram is
plotted (Figure 1.(b)). Finally, the local minima in
the distance distribution diagram which represent the
Finger-webs locations are found (Figure 1.(c)).
This method has however some disadvantages:
it is sensitive to contour irregularities which lead
to false peaks detection. So, we use the smoothing
(a) (b) (c)
Figure 1: Finger-webs determination (a) Reference point
Wm (b) Distance distribution diagram of the hand contour
points to a reference (c) Finger-webs locations.
method by applying a low pass filter.
B. Classification of Hands into Right and Left Hand
The proposed system provides the flexibility for the
user to use one of the two hands for recognition.
Therefore, we apply a classification step for the
database. This step allows reducing the number of
comparisons and subsequently reducing computation
time and recognition time as only half of the database
needs to be searched. Therefore, it is very interesting
for real-time applications. The following rules shown
are applied to determine the right and left hands:
• If Y1 > Y4 then left hand
• If Y1 < Y4 then right hand
Where Y1 and Y4 are the first and fourth local
minimum ordinates previously detected.
This classification rules suffers from a problem in
the absence of the thumb which causes the detection
of three local minima. To overcome this limitation,
we count the number of skin pixels intersected with
the left edge, if it exceeds the number of pixels
intersected with the right edge so it’s a left hand
otherwise it is a right hand.
C. Region of Interest (ROI) Location
After hand detection, it is necessary to extract the ROI
independently of the distance between the hand and
the capture system. Our extraction is based on hand
dimensions and the palm extraction method described
by (Doublet et al., 2007). In the work of (Doublet
et al., 2007), the width of the palm is calculated by the
Euclidean distance between two points which repre-
sent two indexes in the hand’s shape model fixed after
experiments at 30 and 125. In our work, these two
points are defined differently depending on the size of
the hand. To determine the width of the palm, a line is
formed between point A and B (Figure 2.(a)). Then,
we trace the mediator [OE] of the segment [AB] with
[OE]= 1 / 2 [AB]. Finally, we trace the segment that
passes through the point E, which is perpendicular to
the segment [OE], its intersection with the edge of the
hand corresponds to the two points F1 and F2. The
PALMPRINT RECOGNITION BASED ON REGIONS SELECTION
321

Euclidean distance between the point F1 and F2 gives
us the width of the palm denoted L (Figure 2. (a)).
Once the palm’s width L is determined, we could cre-
ate the ROI based on palm dimension. We begin first
by tracing the segment [OO1], which is perpendicular
to the segment [AB] with [OO1] = 1 / 10 L (Dou-
blet et al., 2007), then we trace the segment [E1E2]
that passes through the point O1 and perpendicular to
the segment [OO1] with [E1E2] = 2 / 3 L (Doublet
et al., 2007), finally we continue to trace the other
three sides, each having the same size 2 / 3 L. Figure
2. (b) shows the creation of the ROI.
(a) (b)
Figure 2: Region of interest location (a) palm width L
determination (b) ROI creation with [OO1] = 1 / 10 L
[E1E2]=[E1E3]=[E3E4]=[E4E2] = 2 / 3 L.
After locating the ROI, we applied a mask having
the same size and shape on the original image in order
to extract the ROI from the rest of the hand.
2.1.3 ROI Preprocessing
As the ROI may have different sizes and orientations,
a normalization step is necessary. First, the images are
rotated to the right-angle position by using the verti-
cal axis as the rotation-reference axis. After that, as
the size of the ROI vary from hand to hand, they are
resized to a standard image size. In our work, the im-
ages are resized to T*T with T = 180 pixels. Finally,
to improve the quality of the image, we attenuate the
noise by applying a low pass filter.
2.2 Features Extraction
Features extraction is defined to describe the ROI by
the features that best discriminate the palmprint. In
our work, we propose a new way to apply the local
binary patterns (LBP) texture descriptor.
The LBP operator, being introduced by (Ojala
et al., 1996), is a simple yet powerful texture descrip-
tor which has been used in various applications. LBP
operator labels every pixel in an image by threshold-
ing its neighboring pixels with the center value. After
the labels have been determined, a histogram H of the
labels with dimension 255 is constructed as:
H
l
=
∑
i, j
{L(i, j) = l} l = 0, . .. , n− 1 (1)
Where n is the number of different labels pro-
duced by the LBP operator, while i and j refer to the
pixel location. To improve the robustness and gener-
alization ability of the original LBP operator, it has
been extended by (Ojala et al., 2002) to take account
neighborhoods of different sizes and shapes. Another
extension to the original LBP operator introduced by
(Ojala et al., 2002) is to use so called uniform pat-
terns. Ojala et al also found that only 58 of 256 LBP
patterns are uniform. (Ahonen et al., 2004) found in
their experiments with texture images, that 90% of
patterns are uniform. Subsequently, the amount of
data can be reduced by constructing a histogram of
dimension 59. The whole procedure of our palmprint
features extraction is illustrated in Figure 3.
First, we divided the ROI of the palmprint into r
* r non-overlapped square sub-regions R0,..., R (r *
r) -1, each of them has the side length of T/r. This
division allows us to take into account the spatial re-
lations of the palmprint regions. Then, we apply uni-
form LBP in the (8, 1) neighborhood within each of
the sub-regions to describe the texture features of the
palmprint. Finally, the concatenation of histograms
produced by each region allows getting a global his-
togram that represents our features vector.
2.3 Features Selection
When the image has been divided into regions, it
can be expected that some of the regions contain
more useful information than others in terms of distin-
guishing between people. Therefore, we use Sequen-
tial Forward Floating Selection (SFFS), developed by
(Pudil et al., 1994), as a features selection method.
The principle of the SFFS algorithm is as follows: it
allows adding a features (e.g. sub-region) at each step
and deletes multiple as the subset result improves the
objective function: the minimization of the false clas-
sification rate. The pseudo-code of our features selec-
tion algorithm is the following:
Where E
0
is the error rate (false classification
rate), Cj refers to the sub-regions, n to the number
of selected sub-regions, k to the total number of sub-
regions and Sn to the pool of the selected sub-regions.
2.4 Features Matching
Several possible dissimilarity measures have been
proposed for histograms. In this work, we use the
following X
2
statistic:
X
2
(H
P
, H
G
) =
l
∑
i=0
(H
P
i
− H
G
i
)
2
(H
P
i
+ H
G
i
)
(2)
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
322
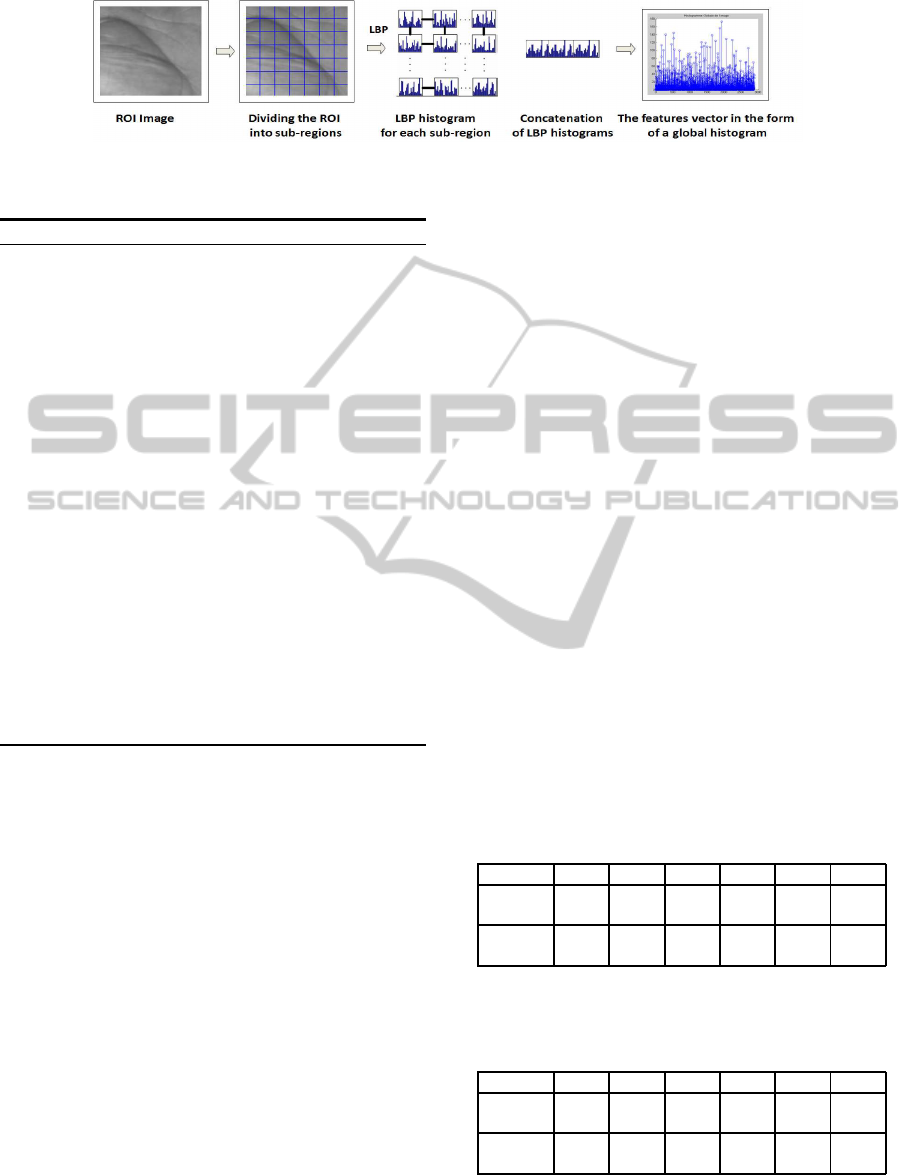
Figure 3: Diagram of palmprint features extraction.
Algorithm 1: Features selection algorithm.
Initialize an empty subset S
0
; E
0
= 100%; n = 0;
/Find the best feature that minimize the objective func-
tion and update S
n
( forward)/
while n < k do
C
j
= argmin
C
j
6∈S
n−1
E
S
n−1
∪C
j
S
n
= S
n−1
∪C
j
E
n
= E(S
n−1
∪C
j
)
n = n+ 1
/Find the worst feature that minimize the objective
function and update S
n
(backward)/
while n > 2 do
C
j
= argmin
C
j
∈S
n
E
S
n
\C
j
B
e
= S
n
\C
j
E
B
e
= E(B
e
)
if E
B
e
< E
n
then
S
n−1
= B
e
E
n−1
= E
B
e
n = n− 1
else
Break
end if
end while
end while
where l is the length of the features vector of the
palmprint image, H
P
refers to a target palmprint his-
togram and H
G
to a model palmprint histogram.
3 EXPERIMENTAL RESULTS
AND COMPARISON
In this section, we present the experiments performed
during the on-line stage. Before presenting them, we
will briefly describe the databases used.
3.1 Palmprint Databases
In order to test our recognition process, two palm-
print databases are adopted, including “CASIA-
Palmprint” Database (CASIA-Palmprint-Database,
2003) and “PolyU-Palmprint” Databases (PolyU-
Palmprint-Database, 2005). “CASIA-Palmprint”
Database contains 4512 palmprint images captured
from 282 subjects. For each subject, we collect 8
palmprint images from both left and right palms. All
palmprint images are collected in the same session.
“PolyU-Palmprint” Database contains 7752 palm-
print images collected of 193 subjects. In this dataset,
we collected the palmprint images on two separate
sessions. On each session, the subject was asked to
provide about 10 images, each of the left palm and the
right palm. We used “CASIA-Palmprint” database as
a training base for the SFFS algorithm, as well as a ba-
sis for evaluating the performance of the whole pro-
cess of our approach. To validate this performance,
we used “PolyU-Palmprint” database.
3.2 On-line Experiments
In our on-line phase, three experiments were con-
ducted for six different divisions using 8 images
of each hand of 282 users taken from “CASIA-
Palmprint” databases. So, first we randomly selected
5, then 4, and finally 3 images of each hand for the
gallery and the rest for the probe. The result of the
Recognition Rate (RR) achieved in these experiments
is shown in Table 1, Table 2 and Table 3 respectively.
Table 1: Comparison of recognition rates with and without
selection using 5 images of each hand for the gallery and 3
images of each hand for the probe.
RR(%) 2*2 3*3 4*4 5*5 6*6 7*7
Without 94,38 95,62 96,67 96,85 96,73 96,98
Selection
With 94,38 94,81 96 96,98 96,79 97,53
Selection
Table 2: Comparison of recognition rates with and without
selection using 4 images of each hand for the gallery and 4
images of each hand for the probe.
RR(%) 2*2 3*3 4*4 5*5 6*6 7*7
Without 92,53 94,46 95,42 95,79 96,20 96,29
Selection
With 92,53 94,23 95 96,34 95,46 96,66
Selection
These three experiments show a gain in terms of
RR for different numbers of divisionsinto sub-regions
and for different numbers of images in the gallery and
PALMPRINT RECOGNITION BASED ON REGIONS SELECTION
323
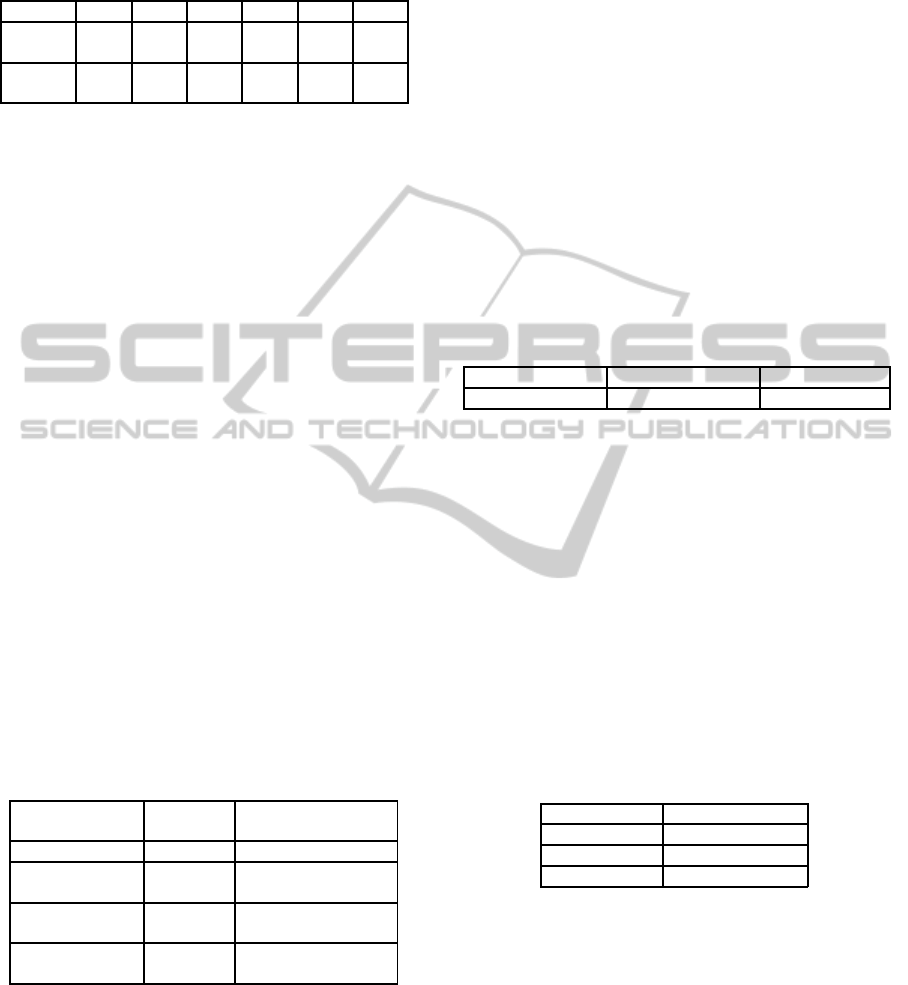
Table 3: Comparison of recognition rates with and without
selection using 3 images of each hand for the gallery and 5
images of each hand for the probe.
RR(%) 2*2 3*3 4*4 5*5 6*6 7*7
Without 88,93 92,79 93,85 93,92 94,54 94,14
Selection
With 88,93 91,52 94 94,14 94,04 94,72
Selection
the probe, therefore, the importance of the selection
phase. This gain is the result of ignorance of the re-
gions with useless information e.g. regions that in-
crease the intra-class variability among the palmprint
images. From the results of the three previous experi-
ments, it is noted that division 7 gives the best identi-
fication rate. Therefore, we have opted for division 7
in our work. We also conclude from these three exper-
iments, the effect of increasing the images number in
the gallery. According to (Tana and Songcan, 2006),
as the number of images per users in the gallery is
high, better the performance of the recognition sys-
tem. Nevertheless, even with a reduced number of
images stored in the gallery as shown in the third ex-
periment, the performance of our system is not too af-
fected which proves their robustness and persistence
among increase in data.
To further validate our contribution regarding the
selection of the most discriminating sub-regions, we
conduct another comparison. This comparison is con-
cerned not only the RR obtained but also the size of
the features vector, identification time and the total
time of our recognition process. Table 4 shows this
comparative study which is done using the division 7
and the same conditions as the first experiment.
Table 4: Comparison of the RR, the size of the features vec-
tor, the identification time and total execution time without
and with selection of discriminating regions.
Without With
Selection Selection
RR 96,98% 97,53%
Size of the 2891 1416 for left hand
features vector 1121 for right hand
Identification 1,35 s 0,75 s
Time
Total execution 2,4 s 1,8 s
Time
As we have seen from these results, three interpre-
tations can be drawn: the first is in terms of perfor-
mance: an improvement gain of about 0,55% in RR,
the second is in terms of storage space generated by
the gain of more than half of size of features vector,
and finally, the third is in terms of speed: a decrease
in identification time and in total running time as half
which is very interesting for real-time applications.
The promising results of our approach have encour-
aged us to further test its performance over “PolyU-
Palmprint” database. The following experimental re-
sult is achieved using 6438 palmprint images taken
by 160 users (Table 5). Indeed, we used images taken
from the 1st session as the gallery (3236 images) and
images from the 2nd session as probe (3202 images)
using the chosen division 7. When images of the
palmprint are collected in two different sessions, sev-
eral problems such as orientation, translation, texture
deformation and lighting conditions vary from one
session to another, which seems always the case in a
real application. This experimental result can be one
of the newexperimentalresults published in the litera-
ture since the majority of work uses palmprint images
are collected in the same session.
Table 5: Comparison of recognition rates with and without
selection on “PolyU-Palmprint” databases.
Without Selection With Selection
Recognition rate 94,41% 95,35%
Although our approach is tested on a database
with significant size using two different sessions
which present more variability, the previous experi-
ence recorded an identification rate of 95,35% and we
have once again shown the importance of the selec-
tion step with a gain of 0,94%.
3.3 Comparison with other Works
In this section, we compare our work with two of the
most famous works in the literature, namely, the work
of (Lu et al., 2003) and the work of (Wu et al., 2003).
Table 6 presents the result of this comparison.
Table 6: Comparison of the obtained performance from the
proposed approach and the work of Lu et al. and Wu et al.
Our approach [Lu et al., 2003]
98,56% 99,14%
Our approach [Wu et al., 2003]
98,83% 99,18%
It can be observed from the previous two experi-
ments that the performance of our approach is slightly
lower comparable to that of Lu et al. and Wu et al.
Apart from the promising results, LBP has another
big advantage over other methods which its simplic-
ity in computation (Goh et al., 2008).
4 CONCLUSIONS
We have presented in this article a new approach for
personal identification by palmprint. In the first place,
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
324

lets say that the step of preprocessing is very impor-
tant for contactless palmprint images and it is used to
locate ROI from each individual hand. Then, a pro-
cedure of partitioning the whole image palmprint into
sub-regions is achieved and the LBP operator is ap-
plied to describe the texture features within each sub-
region. In order to keep only the most discriminating
regions for recognition, the SFFS algorithm has been
the basis for this selection.
To validate our work and our contributions more
precisely, we conducted several on-line experiments
on two real databases with significant sizes “CASIA-
Palmprint” and “PolyU-Palmprint”. These experi-
ments achieved a RR of 97,53% and 95,35% respec-
tively on the two databases. The results obtained were
satisfactory and show a considerable increase in RR
with the selection of discriminating regions which
prove the interest of our approach and also validate
the choices made.
Our future orientation concerns the use of another
solution for automatic segmentation of the hand to
process images taken in a more complex environment.
ACKNOWLEDGEMENTS
Portions of the research in this paper use the “CASIA-
Palmprint” Image Database collected by the Chinese
Academy of Sciences Institute of Automation.
Portions of the work tested on the “PolyU-
Palmprint” Database 2nd version collected by the
Biometric Research Center at the Hong Kong Poly-
technic University.
REFERENCES
Ahonen, T., Hadid, A., and Pietikainen, M. (2004). Face
recognition with local binary patterns. In Proceed-
ings of the European Conference on Computer Vi-
sion(ECCV), pages 469–481.
CASIA-Palmprint-Database (2003). Casia palmprint
database. http://www.cbsr.ia.ac.cn/english/
Palmprint%20Databases.asp.
Chen, J., Zhang, C., and Rong, G. (2001). Palmprint recog-
nition using crease. In Proceeding International Con-
ference on Image Process, volume 3, pages 234 – 237,
Thessaloniki , Greece.
Doublet, J., Lepetit, O., and Revenu, M. (2007). Con-
tact less palmprint authentication using circular ga-
bor filter and approximated string matching. In Sig-
nal and Image Processing(SIP), volume 3, pages 495–
500, Honolulu,United States.
Duta, D., Jain, A. K., and Mardia, K. V. (2002). Match-
ing of palmprints. Pattern Recognition Letters(PRL),
23(4):477–485.
Goh, M. K., Connie, T., and Teoh, A. B. (2008). Touch-
less palm print biometrics: Novel design and im-
plementation. Image and Vision Computing(IVC),
26(12):1551–1560.
Han, C. C., Cheng, H. L., Lin, C. L., and Fan, K. C.
(2003). Personal authentication using palm-print fea-
tures. Pattern Recognition(PR), 36(2):371–381.
Kan, C. and Srinath, D. M. (2002). Invariant
character recognition with zernike and orthogonal
fourier-mellin moments. Pattern Recognition(PR),
35(1):143–154.
Konukoglu, E., Yoruk, E., Darbon, J., and Sankur, B.
(2006). Shape-based hand recognition. IEEE Trans-
actions on Image Processing, 15(7):1803–1815.
Li, W., Zhang, D., and Xu, Z. (2002). Palmprint iden-
tification by fourier transform. International Jour-
nal of Pattern Recognition and Artificial Intelli-
gence(IJPRAI), 16(4):417–432.
Lu, G., Zhang, D., and Wang, K. (2003). Palmprint recog-
nition using eigenpalm features. Pattern Recognition
Letters(PRL), 24(9-10):1463–1467.
Ojala, T., Pietikainen, M., and Maenpaa, T. (2002). Mul-
tiresolution gray-scale and rotation invariant tex-
ture classification with local binary patterns. IEEE
Transaction on Pattern Analysis and Machine Intel-
ligence(PAMI), 24(7):971–987.
Ojala, T., Pietikinen, M., and Harwook, D. (1996). A
comparative study of texture measures with classifi-
cation based on feature distribution. Pattern Recogni-
tion(PR), 29(1):51–59.
Otsu, N. (1979). A threshold selection method from gray-
level histograms. In IEEE Transactions on SMC (Sys-
tems, Man, and Cybernetics), volume 9, pages 62–66.
PolyU-Palmprint-Database (2005). Polyu palmprint
database. http://www4.comp.polyu.edu.hk/
∼biometrics/.
Pudil, P., Novovicova, J., and Kittler, J. (1994). Floating
search methods in feature selection. Pattern Recogni-
tion Letters(PRL), 15(11):1119–1125.
Shapiro, L. and Stockman, G. (2001). Computer Vision.
Prentice Hall.
Tana, X. and Songcan, C. (2006). Face recognition from a
single image per person: A survey. Pattern Recogni-
tion(PR), 39(9):1725–1745.
Wang, X., Gong, H., Zhang, H., Li, B., and Zhuang, Z.
(2006). Palmprint identification using boosting local
binary pattern. In Proceedings of the 18th Interna-
tional Conference on Pattern Recognition(ICPR), vol-
ume 3, pages 503–506.
Wu, X., Zhang, D., and Wang, K. (2003). Fisherpalms
based palmprint recognition. Pattern Recognition Let-
ters(PRL), 24(15):2829–2838.
Wu, X., Zhang, D., Wang, K., and Huang, B. (2004).
Palmprint classification using principle lines. Pattern
Recognition(PR), 37(10):1987–1998.
Zhang, D., Kong, W., You, J., and Wong, M. (2003).
Online palmprint identification. IEEE Transaction
on Pattern Analysis and Machine Intelligence(PAMI),
25(9):1041–1050.
PALMPRINT RECOGNITION BASED ON REGIONS SELECTION
325
