
REAL TIME MEASUREMENTS OF HIGH RESOLUTION
MIXED-SIGNAL CIRCUITS FOR SELF AWARE
EMBEDDED SYSTEM
Drago Strle and Janez Trontelj
Department of Electrical Engineering, University of Ljubljana, Trzaska 25, Ljubljana, Slovenia
Keywords: Self aware mixed-signal embedded systems, Fail-safe embedded systems, Real-time-built-in-self-test,
Pseudo random testing of mixed signal circuits, Efficient testing of mixed signal VLSI circuits, Efficient test
of high resolution ΣΔ AD converters.
Abstract: In this paper we discuss a methodology for efficient real-time measurements of high-resolution mixed-
signal circuits implemented on the IC. The methodology could be used for real time built-in self-tests of a
fail-safe mixed-signal integrated circuits and as a measurement part of a self-aware algorithm and
methodology for integrated mixed-signal circuits. We show that a pseudo-random noise signal is a good
option for the signal source and that the methodology leads to the efficient and cost-effective measurements
in real time. The measurement is running in parallel to the main signal processing. The method is
theoretically analyzed and verified using Matlab models and simulations. As an example the response of
high precision, high order Σ-Δ ADC with most important non-ideal effects is compared to the response of a
bit-true model of a reference digital circuit. The differences are demonstrated using simple area-efficient
cross-correlation algorithm that can be implemented in software or in digital hardware.
1 INTRODUCTION
Continuous advances in IC processing technologies
offer a possibility to produce integrated circuits with
increased complexity and performances for reduced
cost. In addition, integrated circuits are more and
more composed of heterogeneous embedded
systems, with different kind of digital, analogue and
mixed-signal circuits and sensors integrated on the
same IC. In future, this number will increase and the
complexity of all modules will increase as well. It is
thus essential, that modules are built in such a way
that monitoring their own states is possible, which
means that the system is capable to measure some of
its performance parameters and act according to that.
Monitoring is an essential part of any self-adaptive
and/or self-aware system. This is new and difficult
topics for digital systems (Santambrogio et al., 2010)
and completely new for embedded analogue and
mixed-signal circuits. The problem of self-
awareness of analogue circuits lies in the fact that
this circuits are not flexible as digital circuits are, it
is very difficult to measure their characteristics
without expensive measurement equipment and
without precision generators and usually they do not
have any “built-in intelligence”. The problem is
even harder if high resolution mixed-signal
embedded modules like Σ-Δ A/D converters are
involved because they are complicated analogue
structures, which are difficult to design and almost
impossible to measure without high resolution
instruments. The modules may also operate at high
frequency, while their power consumption is limited
to a minimum. Fortunately, modern heterogeneous
systems always consists of digital hardware and/or
software signal processing, which provide the
opportunity for evaluation of monitored parameters;
a precision analogue signal source or appropriate
replacement is still needed if someone wants to
measure the parameters of the analogue module. For
systems where human life may be in danger in the
case of the failure, the self awareness and thus the
measurements of the most important parameters
must be executed in real time, that is in parallel to
the real operation of the system. Example of such
self-aware system is for example electronic stability
system in passenger car (Strle, 2007) where the
measurement channels and the sensors are
582
Strle D. and Trontelj J..
REAL TIME MEASUREMENTS OF HIGH RESOLUTION MIXED-SIGNAL CIRCUITS FOR SELF AWARE EMBEDDED SYSTEM .
DOI: 10.5220/0003406205820589
In Proceedings of the 1st International Conference on Pervasive and Embedded Computing and Communication Systems (SAAES-2011), pages
582-589
ISBN: 978-989-8425-48-5
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

monitored in real time in parallel to the real
operation. Many other examples that require fail-
safe operation exist, therefore, it make sense to
develop a methodology and a general frame-work
for RTBIST (real time measurements; we name it
real-time-built-in-self-test) of a mixed signal
circuits. Such real time measurements are the basis
for self-awareness of embedded analogue and
mixed-signal circuits. To be able to measure
characteristics of embedded mixed-signal module, a
high precision generator is needed that is simple to
built, requires small silicon area for the
implementation and needs little power for the
operation. Such generator is one bit pseudo random
(PRN) signal generator described in subsection 2.2.
The rest of the paper is organized as follows. In
section 2 the principles of measurements using
pseudo random signal are explained. Section 3 deals
with measurements of high resolution Σ-Δ
modulator using PRN source. Section 4 introduces a
real time measurements of important parameters that
is going on in parallel to the normal operation, while
section 5 deals with implementation of efficient
classification circuit. Section 6 presents one example
and section 7 concludes the article.
2 PRN MEASUREMENTS
The first step to reach or achieve self awareness is to
measure important parameters of embedded mixed-
signal circuit that can be any combination of
interconnected analogue and/or mixed-signal and
digital modules. Generally, to measure
characteristics of such circuit a precision signal
generator is needed with parameters better than the
circuit to be measured. Such signal generator is not
available on chip and would be very difficult,
demanding and expensive to built. In addition,
measured results must be evaluated with high
precision and as fast as possible. Fortunately, on a
mixed signal VLSI circuit a DSP is usually available
and if designed properly it can execute efficiently
the algorithms needed for the evaluation of the
performance measurements in real time.
One possibility to measure the performances of a
high resolution analogue or mixed-signal circuit is to
compare the response of the analogue LTI system
(continuous or discrete time) with digital discrete
time system having the same architecture and equal
coefficients. The system to be measured is high
precision analogue or mixed-signal circuit
implemented on the chip, while reference LTI
system can be implemented on or off the chip in
hardware or in software. If one bit pseudo random
noise (PRN) generator with appropriate
autocorrelation and approx. white PSD is used as a
signal source a high precision and high linearity can
be achieved easily and on a very small silicon area.
2.1 Theory of PRN Measurements
The easiest way to measure analog Linear-time-
invariant (LTI) system (discrete time or continuous
time) is to measure its transfer function in
frequency domain. Such measurements require
precision sine-wave generator and narrow
bandwidth signal or spectrum analyzer or
calculation of the FFT coefficients. Usually a
precision sine-wave generator is not available on-
chip and the measurement need a long time because
the transfer function must be measured at several
different frequencies and amplitudes. Theoretically,
the time needed for the measurements could be
reduced measuring the response
hn to the unit
delta pulse
t
. In this way, all information of the
LTI system would be obtained in one measurement.
Unfortunately, the method is difficult to use
because it requires huge dynamic range of a system
or the response is covered by the noise and it is
therefore not practical.
Applying Pseudo Random Noise signal (PRN)
with appropriate amplitude and approx. white
spectrum and Gaussian probability density function
(PDF) to the input of an LTI system (Couch, 1993
and Pan, 1997) provides the opportunity to measure
the response
hnof the LTI system. If mixed-
signal LTI is running in parallel to the reference
(digital) LTI as suggested on Figure 1 the
difference between two LTI systems could be
measured efficiently. Input signals are the same for
both systems (with possibly slightly different gain)
and have noise-like properties. They are shaped by
two, generally different deterministic transfer
functions
1
hnand
2
hn. Both responses are
exactly the same if transfer functions are the same.
The first response
1
y
n corresponds to analog or
mixed-signal discrete or continuous time system
while
2
y
n corresponds to “exact” digital discrete
time system. Both have exactly the same
architecture and equal coefficients. The later is
always nominal because it is implemented in digital
hardware or software with sufficient word-lengths
that the quantization noise of the calculations could
be neglected.
REAL TIME MEASUREMENTS OF HIGH RESOLUTION MIXED-SIGNAL CIRCUITS FOR SELF AWARE
EMBEDDED SYSTEM
583

Figure 1: LTI systems driven by signal x[n].
Analog discrete time system described by
1
hn
may deviates from nominal because of catastrophic
faults (short or open circuits, etc.) and/or
parametric faults: spread of parameters owing to
process parameter changes, matching and
temperature variations, ageing. Cross-correlation
between input signal and response of each system
is proportional to the impulse-responses
x
hm
according to (1) and (2) if input signal
x
n
has
noise-like properties (5). We used discrete time
convolution (3) to calculate response of discrete
time LTI system to an arbitrary input, (4) to
calculate cross-correlation and (5) to
1
22
11
0
xy x x
k
mhm hk
(1)
2
22
22
0
xy x x
k
mhm hk
(2)
calculate auto-correlation of time-shifted white
noise signal. E{.} is the expectation operator.
0k
y
nxnkhk
(3)
xy
mExnynm
(4)
22
xx
E
xnxn m k m k
(5)
Cross-correlations given by (1) and (2) are
proportional to appropriate impulse response
i
hn
and variance of the noise if the mean value of the
noise signal
2
x
approaches zero, which happens
for sufficiently long pseudo random sequence
(
Zepernick, 2005).
The difference of cross-correlations of LTI
systems is proportional to the difference of impulse
responses according to (6) if
2
x
is sufficiently
small, which happens for long period of PRN.
,1 ,2
,,1,2
2
12
xy xy
xy xy
x
mmm
hm h m
(6)
In the ideal case, both responses are the same and
the difference is zero (7):
,1 ,2
,
0, 1, 2,...
xy xy
mm
(7)
If we assume that digital system LTI
2
has nominal
impulse response
2
hn hn , while analogue
system described by LTI
1
has real impulse response
that deviates from the nominal by
m
then:
1
hn hn n
. The difference of cross-
correlations is proportional to the deviation
m
of
the responses and the variance
2
x
of the noise (8).
,1 ,2
2
,
xy xy
x
mm
(8)
Calculation efficiency can be improved by
calculating first the difference of both responses and
then the cross-correlations between noise source and
the difference of the responses. For linear systems
the results are the same as before (9):
,
12
22
12
x
xx
m
Exn y n m y n m
hm hm m
(9)
It is not possible to calculate the expectation
operator from the definition (4), but for ergodic
random signals the time-average operation is equal
to expectation calculation (Hayes, 1996) (10):
1
0
1
lim
N
N
n
Exnyn m
x
nynm
N
(10)
For sufficiently large N the estimate of the mean of
the cross-correlation
__
,x
m
(11) is equal to the
cross-correlation (12). This result provides the
opportunity for efficient calculation of cross-
correlation coefficients.
1
__
,
0
1
00
1
00
1
1
1
nN
x
n
nN
nk
nN
kn
mxnnm
N
x
nxnmkk
N
kxnxnmk
N
(11)
__
,
,
x
x
Em m
(12)
n
x
1
1
1
hHzn
2
1
2
hHz
n
11
0k
y
nxnkhk
22
0k
y
nxnkhk
PECCS 2011 - International Conference on Pervasive and Embedded Computing and Communication Systems
584
2.2 PRN as a Signal Source
All results in previous subsection are based on the
assumption that the input signal has real “white
noise” properties. In reality, such signal does not
exist and even approximation is hard to implement.
Good approximation, which is easy to built and
requires small silicon area is pseudo random noise
signal (PRN) that under certain conditions possesses
appropriate characteristics (Zepernick, 2005):
The spectrum is discrete with approximate
“white” power spectrum density (PSD). The spectral
components exist at frequencies
21
N
iclk
ff
for
0... 2 1
N
i ; the sequence is periodic and
repeated every
21
N
clock cycles,
The period is sufficiently long so, that
2
x
approaches zero. Inside period the signal appears
random,
All states have approx. equal probability, while
state 0 is not allowed,
The PRN can be single or multi bit, dependent on
the application but the linearity and accuracy
requirements must be maintained,
The sequence with appropriate autocorrelation
properties
,
1
xx
R
for
0
, otherwise
,
0
xx
R
must be used,
The PRN source must be simple with small
silicon area required for the implementation.
Several useful implementations of PRN exist
(Zepernick, 2005). Converting binary pseudo
random signal into analogue voltage is accomplished
using 1 bit D/A converter that is inherently linear,
very accurate and very simple for the
implementation. Eventual inaccuracy of the gain
coefficient can be corrected during production
calibration phase.
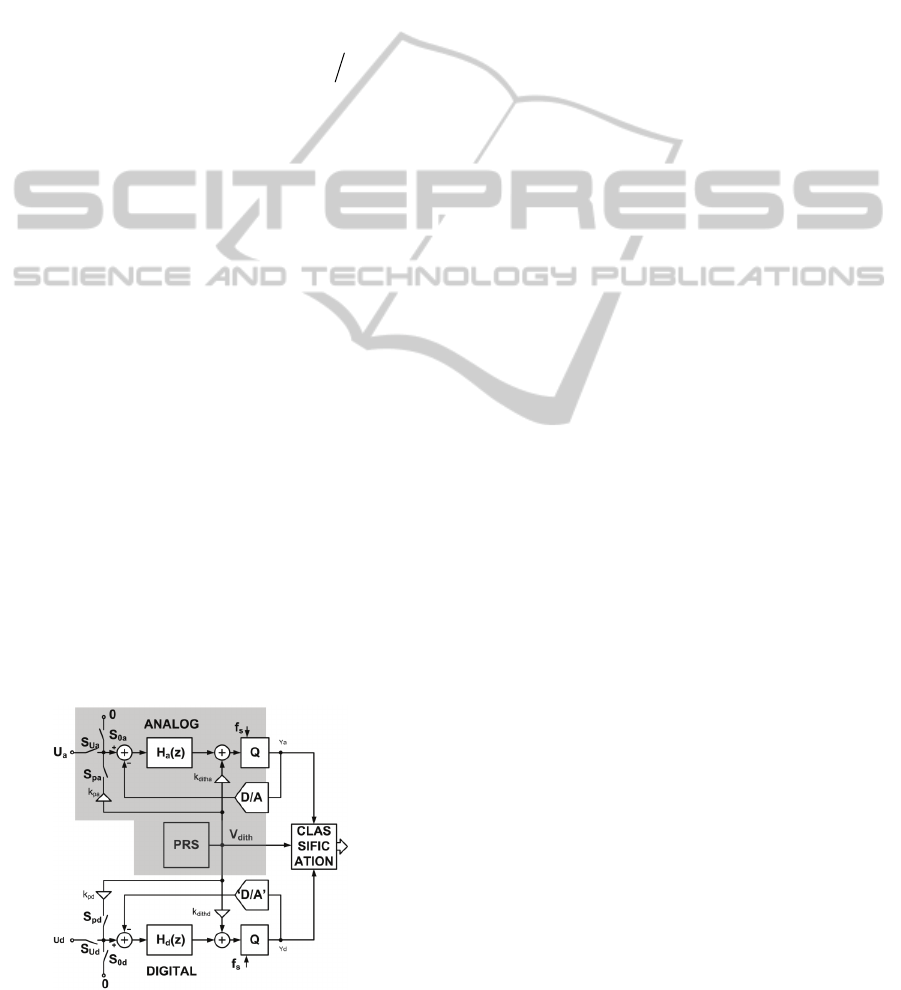
Figure 2: PRN measurements of a modulator.
3 PRN MEASUREMENTS
Measurement of high precision and high resolution
A/D converter requires a precision measurement
system. For fail-safe electronic system the status of
the system and also the status of the ADC must be
checked in parallel to the normal operation; any
deviation from optimum behaviour must be noticed
immediately, therefore important parameters must
be measured constantly without the presence of high
precision measurement system. One possibility is
shown on Figure 2, where basic idea for efficient
measurements of a - modulator is presented.
Analogue modulator in grey box is implemented on
silicon together with PRN generator (PRS source)
that fulfils conditions defined in subsection 2.2. We
can assume that after calibration the constants k
ditha
and k
pa
are exact. The PRN signal is used in any case
as a dither signal to prevent limit cycles (Reefman,
2005) and to linearize the quantizer (Widrow, 2008),
so it is already present in the circuit. If a multi-bit
internal D/A converter is needed, than appropriate
linearization or dynamic element matching
technique must be used (Jiang, 2007). Dither signals
are always connected to the modulator’s dither
inputs, usually in front of the internal quantizer. The
second modulator, outside the gray area is a
reference digital modulator that can be implemented
on the chip or off the chip in digital hardware or
software algorithm; it should have exactly the same
architecture and exactly the same coefficients as the
analogue modulator that we want to measure.
Two measurements are generally needed. At
first, both inputs are connected to zero (U
a
=0, U
d
=0),
while PRS is connected to dither inputs through k
dith
and therefore, the noise transfer function or the
difference of NTFs is measured. If PRN signal is
connected to the inputs through coefficient k
px
and at
the same time to dither inputs through k
dithx
, the
signal transfer function or the difference of STFs is
measured. The digital modulator has exactly the
same structure as the analogue modulator with
equivalent coefficients, but it is built with digital
hardware or software with sufficient word-lengths to
render negligible any quantization noise owing to
fixed-point arithmetic. The digital modulator
together with classification block can be
implemented outside the chip as a hardware or
software module or in case of RTBIST it can be
included on-chip together with analogue modulator.
It is estimated, that in modern 90nm CMOS
technology the area of digital modulator is only one
half of the area of the analogue modulator. In both
cases, the digital modulator is running in parallel to
REAL TIME MEASUREMENTS OF HIGH RESOLUTION MIXED-SIGNAL CIRCUITS FOR SELF AWARE
EMBEDDED SYSTEM
585

the analogue modulator using the same or
synchronized PRN signal. Both bit-streams and PRN
signals are monitored with classification block that
calculates cross-correlation coefficients and decides
if analogue modulator fits the requirements despite
the changes caused by process parameters, matching
effects, temperature drift, ageing etc. The behaviour
of digital modulator is assumed to be stable, while
analogue modulator is subject to changes and this
changes we want to measure.
modulators are non-linear systems so the
theoretical background described in subsection 2.1
could be used only if the module is linearized. This
is achieved by adding dither signal to the input of
the modulator’s quantizer; in this way eventual
limit-cycles are de-correlated (Reefman, 1997) and
the operation is linearized (Widrow, 2008). In that
case the modulator can be approximated as linear
system in z domain (Hamoui, 2004) according to
(13), (14), (15) and (16):
aaa
aa
Yz STFzU z Rz
NTF z z P z
Q
(13)
dd
dd
d
Yz STFz
NTF z z P z
Uz
Q
(14)
The relations between
Hz,
STF z and
NTF z
are given in (15) and (16) for both modulators,
where index x=a stands for analogue and x=d for
digital modulator.
Rz represents input-referred
circuit noise of the analogue modulator and
Pz
represents pseudo-random noise used for dither.
1
1
x
xx
x
Hz
STF z NTF z
Hz
(15)
1
1
x
x
NTF z
H
z
(16)
It is assumed that digital and analogue quantization
noises are not equal
ad
Qz Qz because internal
states might be different even if applied input signals
are exactly the same. We need to do two tests to be
able to measure both transfer functions (STF and
NTF). For the first test the input signals are set to
zero (
0
a
un ,
0
d
un ), the PRN is applied to
both dither inputs so
a
NTF z
and
d
NTF z
or their
difference can be determined. The cross correlation
can be determined using (17), (18) and (5). We
assumed, that
pn is not correlated to any other
noise source:
rk,
a
qk and
d
qk.
1
22
,
0
axp
py xp a a
k
m ntf m ntf k
(17)
1
22
,
0
dxp
py xp d d
k
m ntf m ntf k
(18)
If sufficiently long PRS sequence is used, the mean
value of PRS signal is approaching zero
2
0
xp
and
cross correlation become proportional to
corresponding impulse response of the noise-transfer
function. The difference of both cross-correlations is
proportional to deviation of analogue noise-transfer
function from digital noise-transfer function
according to (19) and (20):
,1 ,1
2
,
pya pyd
xp ntf
mm
(19)
ntf a d
mntfmntfm
(20)
For test 2, the PRN signal is connected to both
inputs in addition to both dither inputs, so cross-
correlations are ((21), (22)).
2
,2
...
pya xp a a
m stf m ntf m
(21)
2
,2
...
pyd xp d d
m stf m ntf m
(22)
Moreover, the difference is (23):
,2 ,2
2
,
pya pyd
xp stf ntf
mmm
(23)
From (19) and (23) one can estimate deviation of
signal and noise transfer functions of analog
modulator from the reference modulator and since
we know
ntf
m
it is easy to calculate
stf
m
.
4 RTBIST
Real time monitoring of some performance
parameters of the mixed-signal circuit in parallel to
the normal operation comes from the fail-safe
system requirements and the name RTBIST (
Real-
Time-Built-In-Self-Test) reflects that. We could
also name it real-time-self-aware (RTSA) system
taking into considerations that higher level functions
are implemented in dedicated hardware or software.
Here, we are dealing only with methodology, which
is based on ideas presented in sections 2 and 3 with
the following differences:
As explained in section 3 both modulators are
implemented on chip,
The LTI
1
(analogue modulator) process the input
analogue signal and in parallel the small amount of
PRN, while digital modulator with the same
PECCS 2011 - International Conference on Pervasive and Embedded Computing and Communication Systems
586
architecture and equal coefficients, process only the
PRN noise.
During production the cross correlation
coefficients of the PRN and the difference of the
responses for NTFs and STFs at nominal conditions
are calculated and stored.
During real measurements, the NTF is not
measured explicitly because it can be calculated
from the relation between STF and NTF given in
(15):
1
xx
NTF z STF z
.
For S-C implementation we know that the gain
factor for the PRN connected to the input is very
accurate (0.1%) and has a very low temperature
coefficient.
The correlation between PRN and input signal is
assumed negligible.
The amplitude of PRN signal is small so that
only a very small fraction of a mixed-signal circuit
dynamic range is consumed by the test source PRN.
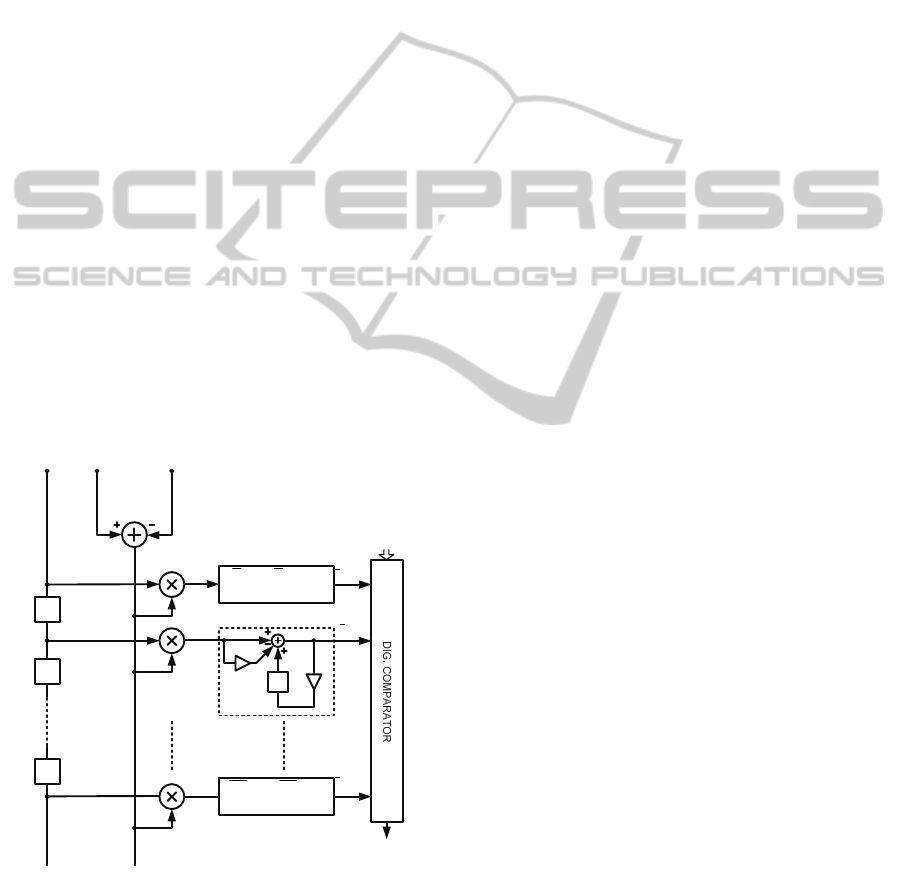
5 CLASSIFICATION
A classification circuit can be implemented
according to Figure 3, which closely follows
equation (11). The average is replaced by moving
average or the first order filter.
Figure 3: Possible classification circuit.
The signal PRN is delayed instead of
y
n to
simplify the hardware: this is possible for ergodic
signals; PRS signal is simply delayed using
pq
bit
shift register because only
1pq
samples of unit
step response are needed for LTI systems having p
poles and q zeroes, so that the transfer function is
correctly represented (Hayes, 1996). Multiplication
is performed by simple exchange of the signs as
dictated by the PRN. In addition, for one-bit
modulators the bit-streams
a
y
n and
d
y
n are
also 1 bit, so the result of the subtraction is within
2, 0, 2
ab
yn y n y n; the multiplication
circuitry is very simple. Each product
i
vn is then
LP- filtered. It requires a small portion of FPGA
and/or little silicon area. If needed, a higher order
digital-averaging filter could be built. The digital
comparator then decides if all results are within the
limits
i
L :
; 1, 2,....
ii
nLn
(24)
How many samples do we need for reliable
classification? Is the number of correlation
coefficients sufficient? What time do we need for
the measurement? What is the probability of
classifying correctly? The answers to these questions
are not simple and are still under consideration.
Available time and hardware resources are limited.
In addition, the accuracy of a decision and its speed
conflict with each other. For our self-aware and/or
fail-safe system we need the information about the
system behaviour as fast as possible, thus,
appropriate selection of conflicting parameters
(time, accuracy of classification, hardware resources
available, etc.) must be optimized for particular
application. For example, a decision that is more
accurate needs more time or a more elaborate
averaging process and higher order filters. Fast
decision usually leads to poor accuracy of
classification, which could be improved by
appropriate higher order filtering which in turn
needs more hardware resources.
6 EXAMPLES
A fifth-order, single-loop, discrete-time Σ-Δ
modulator implemented in S-C technique with one-
bit internal quantizer and feed-forward structure to
reduce power consumption is used as an example.
Over-sampling frequency is 32MHz and the band
of interest is from 20kHz up to 400kHz. The
problem of efficient testing of such modulator is
that we cannot measure internal signals because we
would destroy the operation (internal S-C stages
have capacitances from 0.5pF down to 50fF) and
z
-1
z
-1
z
-1
x(n)
x(n)
x(n-1)
x(n-2)
x(n-p-q)
y
a
(n) y
d
(n)
y(n)=y
a
(n)-y
a
(n)
z
-1
0
n
0
1
1
oo
nn
vn
0
vn
1
vn
pq
vn
1
1
pq pq
pq
nn
vn
1
n
pq
n
OK?
Limits
REAL TIME MEASUREMENTS OF HIGH RESOLUTION MIXED-SIGNAL CIRCUITS FOR SELF AWARE
EMBEDDED SYSTEM
587
the power consumption is restricted. To verify
presented methodology we have built Simulink
models of the modulators and classification circuit.
For LTI
1
the most important analog performances
of opamps (kT/C noise, thermal noise A0, GBW,
offset, slew-rate, non-linearity) and quantizer
(offset, hysteresis, noise, latency) are modeled.
Capacitor ratios can be perturbed according to the
technology and size of unit capacitor. The digital
modulator and classification circuit are with bit-
true models that calculate in real time eleven cross-
correlation coefficients
0
through
10
using
first order moving average filter with pole:
14
12
. Moving average filter needs approx.
2ms for the transient; the results after that time
could be used for the comparison. We have run
several simulations, trying to imitate different
problems of analog modulator related to the
production spread as well as to temperature drift
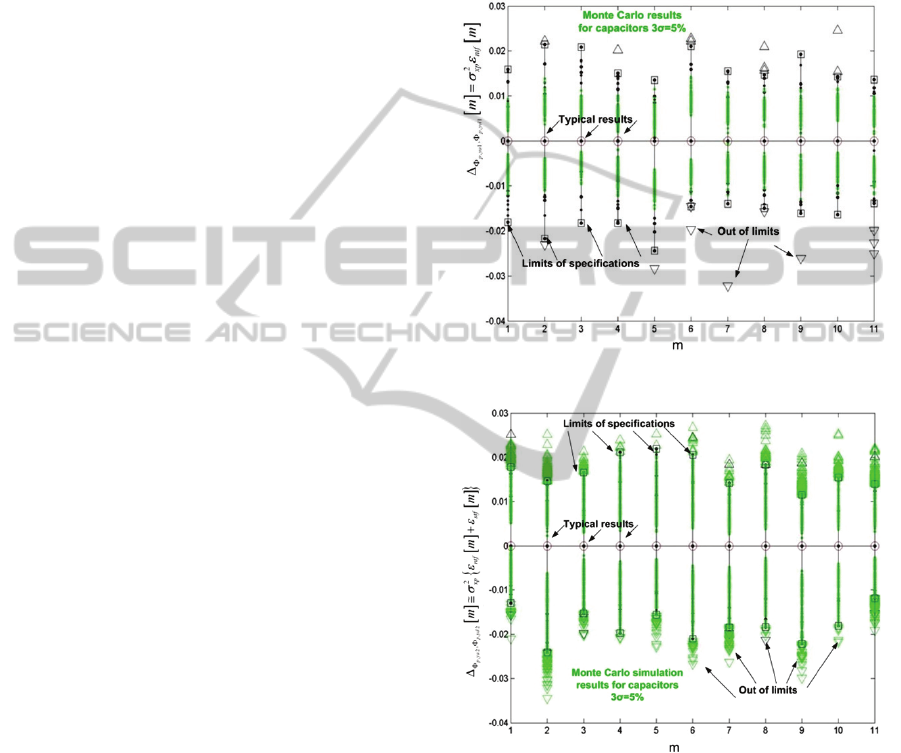
and other possible problems. A summary of
simulation results is presented on Figure 4 for noise
transfer function and on Figure 5 for the signal
transfer function. The following experiments were
simulated: (a) nominal circuit with no kT/C noise,
no op-amp noise, and ideal op-amp characteristics,
(b) real op-amp characteristics inside allowed
ranges, (c) allowed kT/C and op-amp noise with
other conditions as before, (d) the same as (c) with
kT/C 10 times bigger (out of specs), (e) the same as
(c) but slew-rate of first op-amp 2 times lower than
the min allowed, (f) the same as (c) but one
capacitor changed by 30%, (g) limit of the 1
st
amplifier reduced to 0.4V from 0.5V, (h) Monte-
Carlo run with capacitor ratio changes
35%
proportional to unit cap size (the spread is
intentionally exaggerated to get some out-of-range
results). On both figures, cross-correlation
coefficients are plotted for different experiments
marked with triangles. We can see that in both
cases some of the results are out of the limits
marked with dots inside the squares. The limits
were defined according to the specifications using
Matlab simulations.
7 CONCLUSIONS
In this article a possibility for real-time
measurements of high resolution mixed-signal
circuits have been investigated. The basic idea and
the theory behind it have been explored for simple
LTI system as well as for more complex mixed-
signal module (Σ-Δ modulator). A block diagram
of efficient measurements has been presented
together with possible implementation of
classification circuitry. The aim of presented
methodology is to pave the way for real time built-
in self test (RTBIST) of such embedded modules
and to real time self aware (RTSA) methodology
measurements.
Figure 4: Classification result for NTF.
Figure 5: Classification results for STF.
The investigation is far from finished. We
believe that only basic steps were analyzed in this
work. Many other problems still need to be
investigated, like for example: optimization of
classification algorithm according to required
speed and accuracy, influence of properties and
length of PRN sequence to the accuracy and speed
of measurements, influence of nonlinearities.
PECCS 2011 - International Conference on Pervasive and Embedded Computing and Communication Systems
588

REFERENCES
Couch II, L. W. Digital and Analogue
CommunicationSystems
. McMillan Publishing, 1993.
Hamoui, A. A. and Martin, K. W. High-Order Multi bit
Modulators and Pseudo Data-Weighted Averaging in
Low-Over-sampling
ADCs for Broad-Band
Applications
. IEEE Trans on CAS-I, vol. 51, no. 1,
January 2004.
Hayes, M. H. (1996). Statistical digital signal processing
and modelling
. New York: John Wiley & Sons.
Jiang, H. Olleta, B. Chen, D. Geiger, L.
Testing
HighResolution ADCs With Low-
Resolution/AccuracyDeterministic Dynamic Elelment
Matched DACs
. IEEE trans. On Instrumentation and
Measurements, vol. 56, No. 5. Oct. 2007.
Pan, C. Y. and Cheng, K. T.
Pseudo-random Testing of
Mixed-Signal Circuits
. IEEE trans. On CAD of
Integrated Circuits and Systems, vol. 16, No. 10,
October 1997.
Reefman, D. Reiss, J. Jansen, E. Sandler, M. Description
of Limit Cycles in Sigma-Delta Modulators
. IEEE
Trans. On CAS-I, Vol. 52, No. 6, June 2005.
Santambrogio, M. D. Hoffmann, H. Eastep, J. Agarwal, A.
Enabling Technologies for Self-Aware Adaptive
Systems
. NASA/ESA Conference on Adaptive
Hardware and Systems, 2010.
Strle, D. and Kempe, MEMS-based inertial system. Inf.
MIDEM
, dec. 2007, year 37, nu. 4, pp. 199-209.
Widrow, B. and Kollar, I. (2008).
Quantization noise.
Cambridge University press.
Zepernick, H. J. Finger, A. (2005). Pseudo Random Signal
Processing: Theory and applications
. New York: John
Wiley & Sons.
REAL TIME MEASUREMENTS OF HIGH RESOLUTION MIXED-SIGNAL CIRCUITS FOR SELF AWARE
EMBEDDED SYSTEM
589
