
USER BEHAVIOR RECOGNITION FOR AN AUTOMATIC
PROMPTING SYSTEM
A Structured Approach based on Task Analysis
Christian Peters, Thomas Hermann and Sven Wachsmuth
CITEC, Bielefeld University, Bielefeld, Germany
Keywords:
User behavior recognition, Task analysis, Bayesian network, Bayesian filtering.
Abstract:
In this paper, we describe a structured approach for user behavior recognition in an automatic prompting sys-
tem that assists users with cognitive disabilities in the task of brushing their teeth. We analyze the brushing task
using qualitative data analysis. The results are a hierarchical decomposition of the task and the identification
of environmental configurations during subtasks. We develop a hierarchical recognition framework based on
the results of task analysis: We extract a set of features from multimodal sensors which are discretized into the
environmental configuration in terms of states of objects involved in the brushing task. We classify subtasks
using a Bayesian Network (BN) classifier and a Bayesian Filtering approach. We compare three variants of
the BN using different observation models (IU, NaiveBayes and Holistic) with a maximum-margin classifier
(multi-class SVM). We present recognition results on 18 trials with regular users and found the BN with a
NaiveBayes observation model to produce the best recognition rates of 84.5% on avg.
1 INTRODUCTION
Cognitive assistive technology aims at developing
systems which support persons with cognitive dis-
abilities in the execution of activities of daily liv-
ing (ADLs). Such persons mostly have problems in
accomplishing ADLs on their own and need assis-
tance to perform such tasks successfully. Automatic
prompting systems can provide assistance and keep
elderly people or persons with cognitive disabilities
further in their own homes which leads to an increase
of independence of the persons and a relief of care-
giver burden.
Recognizing ADLs is an important problem for
the design of automatic prompting systems. However,
there is currently no systematic approach to design
recognition components for different daily activities
like brushing teeth or preparing coffee, etc. Recogniz-
ing such activities is a challenging problem: Firstly,
ADLs usually involve a variety of subtasks which can
be combined in a flexible way to execute the task
successfully. Hence, an automatic prompting system
has to identify the different subtasks independently of
their time of occurrence. Secondly, the variance in the
execution of subtasks is huge, especially for persons
with cognitive disabilities, but also for regular per-
sons. Thirdly, the recognition procedure has to deal
with a low number of training examples because ob-
taining training data in a complex, real-world scenario
is very hard.
In this paper, we describe a structured approach
to user behavior recognition in an automatic prompt-
ing system at the exemplary task of brushing teeth.
We are going from a systematic analysis of the task
to the relevant activities and environmental states of
objects involved in brushing teeth. Therefore, we use
Interaction Unit (IU) analysis proposed in (Ryu and
Monk, 2009) as a method for qualitative data analysis.
IU analysis is utilized for different design decisions:
Firstly, we decompose the brushing task into impor-
tant subtasks which we aim to recognize in our frame-
work. Secondly, we extract environmental configura-
tions in terms of states of objects manipulated during
subtasks, e.g. the position of the mug or the towel.
We discretize features extracted from sensory infor-
mation into environmental configurations as an inter-
mediate representation. We abstract from recognizing
specific movements by tracking objects or the user’s
hands due to the huge variance in execution. Instead,
we classify subtasks based on environmental config-
urations using a Bayesian Network (BN). Each time
we observe an environmental configuration, we up-
date our belief (probability distribution over subtasks)
using Bayesian Filtering. In our recognition frame-
162
Peters C., Hermann T. and Wachsmuth S. (2012).
USER BEHAVIOR RECOGNITION FOR AN AUTOMATIC PROMPTING SYSTEM - A Structured Approach based on Task Analysis.
In Proceedings of the 1st International Conference on Pattern Recognition Applications and Methods, pages 162-171
DOI: 10.5220/0003773601620171
Copyright
c
SciTePress

work, we compare BNs with three different structures
and, hence, different independence assumptions be-
tween variables: (i) IU where the structure is purely
based on the results of IU analysis (ii) NaiveBayes
where environmental states of objects obtained in the
IU analysis are treated independently of each other
(iii) Holistic where environmental states are treated
as a single environmental observation. We underline
that the results of IU analysis are integrated into the
BN structure, either completely as for IU or partially
as for NaiveBayes and Holistic. We compare our ap-
proach to a multi-class Support Vector Machine on
a dataset of 18 brushing trials conducted by regular
persons. Evaluating our framework with regular users
is feasible in a first development cycle where data of
persons with cognitive disabilities is very hard to ac-
quire: We consider the target group in the develop-
ment of the recognition framework because IU anal-
ysis is conducted on videos of persons with cognitive
disabilities in a residential home setting. Since we ab-
stract from the recognition of specific movements by
tracking objects or the user’s hands, data of regular
users can be used for testing our framework because
regular users show similar characteristics in the exe-
cution of the task. However, we aim to evaluate our
framework with persons with cognitive disabilities in
the future.
The remainder of the paper is structured as fol-
lows: Section 2 gives an overview of relevant related
work. In section 3, we describe IU analysis as a
method of qualitative data analysis. Section 4 shows
the feature extraction process from sensory informa-
tion. Our recognition framework is described in sec-
tion 5, followed by results and a conclusion in section
6 and 7, respectively.
2 RELATED WORK
Recognizing complex activities in real-world scenar-
ios is a crucial step in the development of cognitive
assistive technology. Much work is done recognizing
behaviors based purely on (i) visual sensors like cam-
eras (Hoey et al., 2010) (Moore et al., 1999) and (ii)
wearable sensors which are directly attached to the
user (Yang et al., 2009) (Subramanya et al., 2006).
Several approaches based on visual sensors aim to
recognize human behaviors using movement trajecto-
ries of objects or the user’s hands (Hoey et al., 2010),
(Moore et al., 1999), (Nguyen et al., 2005), (Pusiol
et al., 2008). Due to the large variance in task exe-
cution, it is very hard to distinguish between similar
user behaviors based on movement trajectories only.
In this work, we abstract from recognizing movement
trajectories, but classify user behaviors based on en-
vironmental states of objects involved in the brush-
ing task. Object-based behavior recognition was done
e.g. by (Wu et al., 2007) and (Patterson et al., 2005)
using RFID-tagged objects and a Dynamic Bayesian
Network (DBN) for classification. DBNs and Hid-
den Markov Models (HMMs) as a special variant of
DBNs are widely used in user behavior recognition:
(Oliver et al., 2002) use hierarchical HMMs for be-
havior recognition in an office environment, (Galata
et al., 2001) classify dance movements with variable
length Markov models. (Robertson and Reid, 2006)
use HMMs to recognize user behaviors in an urban
surveillance and a sports scenario.
Most approaches for user behavior recognition
in such scenarios are modelled using common-sense
knowledge without further analyzing the task and the
recognition problem. Here, we apply a structured ap-
proach of retrieving relevant information on which
we develop our recognition framework. We use In-
teraction Unit (IU) analysis proposed in (Ryu and
Monk, 2009) as a method for qualitative data anal-
ysis to obtain both relevant user behaviors to be rec-
ognized as well as environmental configurations de-
scribing states of objects. IU analysis was used in a
similar context in (Hoey et al., 2011) in order to facili-
tate the specification process of an automatic prompt-
ing system using a Partially Observable Markov De-
cision Process (POMDP). The following section de-
scribes how we use IU analysis in the development of
our recognition framework.
3 INTERACTION UNIT
ANALYSIS
User behavior recognition in an everyday task like
brushing teeth is a challenging problem: The task
consists of several subtasks that can be combined in
a flexible order to execute the task successfully. The
analysis of the task and the subtasks is an important
step in the development of a recognition framework.
In this work, we apply Interaction Unit (IU) analysis
proposed in (Ryu and Monk, 2009). IU analysis mod-
els interaction by describing the conjunction of cog-
nitive and environmental pre- and postconditions for
individual actions. We apply IU analysis on 23 videos
recorded at our cooperation partner Haus Bersaba,
a residential home belonging to the clerical founda-
tion v. Bodelschwinghsche Stiftungen Bethel in Biele-
feld, Germany. In Haus Bersaba, users with cog-
nitive disabilities like Alzheimer’s Disease, Demen-
tia, Autistic Spectrum Disorder, Epilepsy, etc. per-
manently live. Each video shows one trial of a user
USER BEHAVIOR RECOGNITION FOR AN AUTOMATIC PROMPTING SYSTEM - A Structured Approach based on
Task Analysis
163
brushing his/her teeth while being observed and sup-
ported by a caregiver. The caregiver’s assistance is
needed if the user is not able to proceed in task ex-
ecution. In this work, we are particularly interested
in two aspects of IU analysis: Firstly, the decompo-
sition of the task into subtasks which we will call
user behaviors in the following. Secondly, the en-
vironmental conditions associated with the user be-
haviors. Table 1 shows the results of the IU anal-
ysis for brushing teeth. The brushing task is de-
composed into seven user behaviors as described in
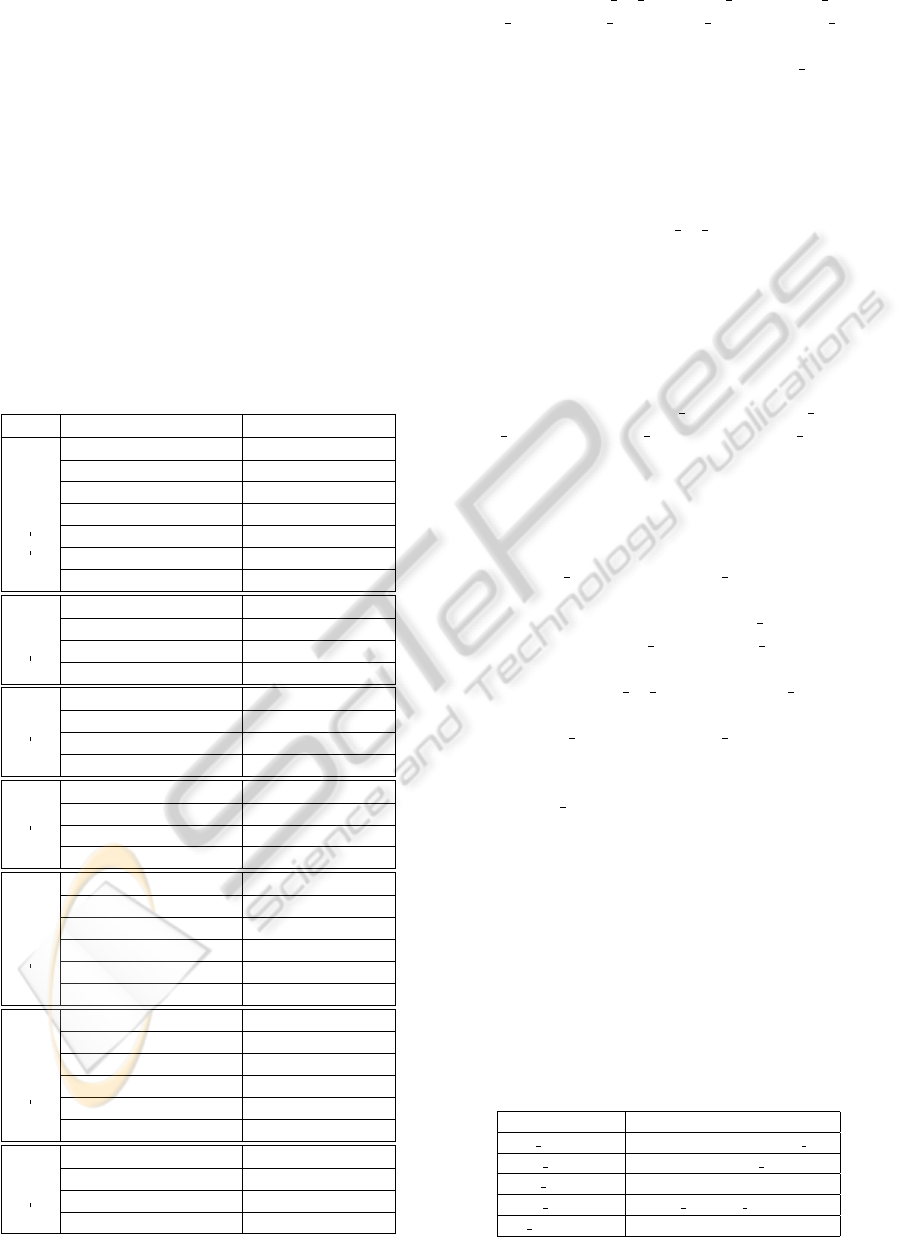
Table 1: Results of the IU analysis for brushing teeth. Col-
umn “UB” describes the different subtasks involved in the
brushing task. Column “UB steps” lists the ideal steps to
execute the according subtask. Column “Current Environ-
ment” shows the environmental configuration in terms of
states of objects involved in a particular step. TT - tooth-
paste tube.
UB Current Environment UB steps
TT on counter take TT from counter
TT closed in hand alter TT to open
brush on counter take brush from counter
brush and TT in hand spread paste on brush
TT is open alter TT to closed
TT closed in hand give TT to counter
paste on brush
TT on counter, brush in hand
mug empty give mug to tap
mug at tap, tap off alter tap to on
mug at tap, tap on alter tap to off
fill mug
mug filled
mug filled give mug to face
mug at face rinse
mug else give mug to counter
rinse mouth
mug counter
brush with paste in hand give brush to face
brush at face brush all teeth
brush at face, teeth clean take brush from face
brush teeth
brush not at face
mug dirty at counter give mug to tap
mug dirty at tap, tap off alter tap to on
mug dirty at tap, tap on clean mug
mug clean at tap, tap on alter tap to off
mug clean at tap, tap off give mug to counter
clean mug
mug clean at counter
brush dirty give brush to tap
brush dirty at tap, tap off alter tap to on
brush dirty at tap, tap on clean brush
brush clean at tap, tap on alter tap to off
brush clean at tap, tap off give brush to counter
clean brush
brush clean at counter
towel at hook, mouth wet give towel to face
towel at face, mouth wet dry mouth
towel at face, mouth dry give towel to hook
use towel
towel at hook
column UB: paste on brush, fill mug, rinse mouth,
brush teeth, clean mug, clean brush and use towel.
Each user behavior is further subdivided into single
steps described in column UB steps. rinse mouth for
example consists of three steps: mug is moved to the
face, the user rinses his/her mouth and the user moves
the mug away from the face. Column Current Envi-
ronment shows the environmental states as a precon-
dition of single user behavior steps. Performing the
step then changes the environmental state, for exam-
ple in the first step of paste on brush: The toothpaste
tube is on the counter and taking the tube changes the
toothpaste location to ’in hand’. We abstract from the
recognition of single steps, but infer the user’s behav-
ior based on the environmental configuration which
is expressed by states of objects manipulated during
a behavior. From column Current Environment, we
extract five discrete random variables describing im-
portant object states: mug position, towel position,
paste movement, brush movement and tap condition.
Since using the toothpaste is not bound to a specific
region, we abstract from the exact location and use
the movement of the paste.
Table 2 shows the state variables and their accord-
ing discrete values.
For paste movement and tap condition, a binary
random variable with values no/yes and off/on, re-
spectively, is adequate. For brush movement, we
have the states no, yes sink and yes face. The lat-
ter ones are important to discriminate between the
user behaviors paste on brush and brush teeth based
on the movement of the brush. The values of the
variables mug position and towel position are the dif-
ferent regions identified in column Current Environ-
ment where the mug and towel appear during task ex-
ecution. No hyp is used if no hypothesis about the
mug/towel position is available.
In the following sections, we describe how we in-
tegrate the state space given in table 2 as an intermedi-
ate representation in our recognition framework: The
decomposition of the task provides the important user
behaviors we aim to recognize. We classify the user
behaviors based on the environmental state space. We
assess the state space on features extracted from sen-
sory information described in the following section.
Table 2: Environmental state space with five discrete ran-
dom variables extracted from the environmental configura-
tion in table 1.
State Variable Values
mug position counter, tap, face, else, no hyp
towel position hook, face, else, no hyp
paste movement no, yes
brush movement no, yes sink, yes face
tap condition off, on
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
164
4 SENSORS AND FEATURE
EXTRACTION
We built a washstand setup which we equipped with
a set of sensors for environmental perception. We
use a combination of unobtrusive sensors installed in
the environment and tools in order to extract features
from which we assess the environmental configura-
tion. We don’t attach any wearable sensors to the user
directly, because we don’t want to disturb in task ex-
ecution. The following list gives an overview of the
sensors.
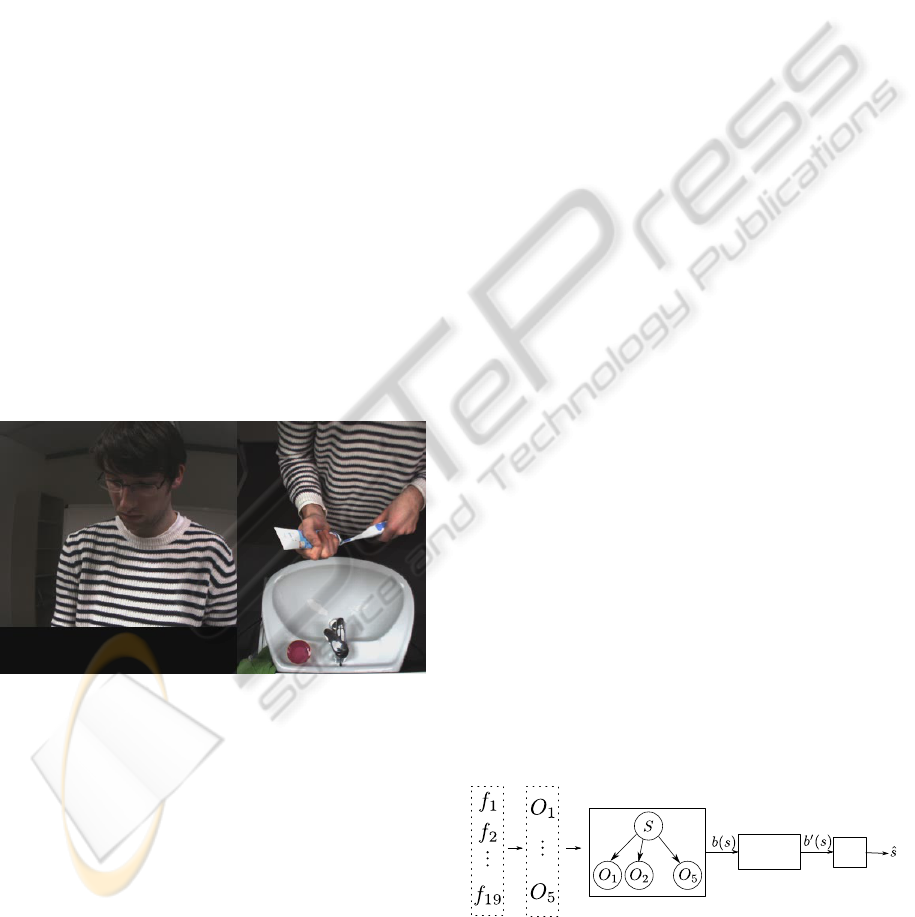
Cameras. We use two cameras observing the scene
from both overhead and frontal perspective as
shown in figure 1. The cameras grab images
of resolution 480x640 (overhead) and 500x620
(frontal) with 30Hz each.
Flow Sensor. A binary flow sensor is installed at the
water pipe. The sensor measures whether the wa-
ter flow is off or on.
9-dof Brush Module. We equipped the toothbrush
with a 9-dof module including a 3-axis accelerom-
eter measuring gravitational acceleration, a 3-
axis gyroscope measuring orientation of the brush
and a 3-axis magnetometer measuring the earth’s
magnetic field.
Figure 1: Example images of the frontal camera (left) and
overhead camera (right), respectively.
As a first step of the recognition framework features
extracted from sensory information are discretized
into environmental state variables given in table 2. In
order to assess the values of the state variables, we
extract a set of 19 features: 4 features each for the
position of the mug and the towel, 1 feature indicat-
ing the water flow, 1 feature describing the movement
of the paste and 9 features for the movement of the
brush. The feature extraction is described in detail
in the following: From the camera images, we ex-
tract the position of the mug and towel using a color
distribution detector. Since the procedure is similar
for both objects, we describe the detection of the mug
exemplarily: The color distribution of the objects is
learned in a supervised manner based on sample im-
ages. The result of the detector is a hypothesis about
the object’s position for each camera image given by
a bounding box. We use the x and y coordinate of
the bounding box center as features. Since we have
a detector on both the overhead and frontal image,
we have 4 features (x and y position on frontal and
overhead image) for the mug. The 4 features for the
towel are calculated accordingly. For estimating the
movement of the paste, we found the number of edge
pixels in the counter region of the overhead image to
be a valuable feature: If the paste is in the counter re-
gion, the paste produces an increased number of edge
pixels compared to the case when the paste is out-
side the counter region due to a manipulation by the
user. Hence, we employ the number of edge pixels in
the counter region as an indicator whether the paste is
moving. Since we have a static camera, the counter
region is predefined in our setup. The flow sensor
returns a binary feature with 1 indicating water flow
and 0 indicating no water flow. For brush movement
detection, we extract 9 features from the brush mod-
ule: acceleration, orientation and the earth’s magnetic
field in x,y and z direction each.
In the following section, we describe our recogni-
tion framework in detail.
5 APPROACH
The IU analysis decomposes a task into different user
behaviors. Each user behavior is further subdivided
into single steps which are described in terms of en-
vironmental states. Hence, the IU analysis structures
the task into a hierarchy of user behaviors and com-
bines semantic information about the user behavior
with environmental states. In our approach, we make
use of the hierarchical structure obtained in the IU
analysis: We use a two-layered framework for user
behavior recognition modeling the hierarchical struc-
ture as shown in figure 2. The features f
1
... f
19
de-
...
Bayesian Network
MPE
Bayesian
Filtering
Figure 2: Overview of the hierarchical classification frame-
work. See text for a detailed description.
scribed in the previous section are discretized into
an intermediate representation of state space variables
USER BEHAVIOR RECOGNITION FOR AN AUTOMATIC PROMPTING SYSTEM - A Structured Approach based on
Task Analysis
165

O
1
...O
5
given in table 2. A Bayesian Network clas-
sifies user behaviors (denoted with variable S) based
on the state space variables into a belief b, a discrete
probability distribution over user behaviors. We apply
Bayesian Filtering to update b to a consecutive belief
b
0
. In every time step, we choose the most probable
explanation from b
0
which is the user behavior ˆs with
the highest probability. In the following sections, we
describe the feature discretization and the Bayesian
Network classification using a Bayesian Filtering in
more detail.
5.1 Feature Discretization
We discretize the features f
1
... f
19
into the five
discrete random variables O
1
...O
5
which corre-
spond to the variables mug position, towel position,
paste movement, brush movement and tap condition
described in table 2. The variables encode the envi-
ronmental configuration obtained in the IU analysis
which is described in table 1. We will denote O
1
...O
5
as observation variables in the following. Each ob-
servation variable O
i
is estimated using a single clas-
sification scheme:
mug position. We determine the value of
mug position using the results of the mug
detector. The detector provides a hypothesis in
terms of the center position (x,y) of a bounding
box for each camera image. Since we have
a mug detector on the frontal and overhead
image, we choose the hypothesis with the highest
confidence in order to get a single hypothesis.
The confidence is the number of pixels in the
bounding box agreeing to the learned color
distribution. We compare the (x,y)-position of
the chosen hypothesis to a predefined set of static
image regions which are the counter, tap and face
region. In our approach, the whole frontal image
is the face region since we don’t explicitly detect
the user’s face due to two reasons: Firstly, the
user’s face is occluded by objects or the user’s
hands for a certain amount of time during the
brushing task which makes the face recognition
error-prone. Secondly, some user’s lean forward
during the brushing task. Hence, their faces
disappear completely from the frontal image
which makes a face recognition unreasonable.
Every image point not in the counter, tap or face
region is considered for the else region. If the
center point is in one of the regions, the variable
mug position is set to the according value. If
the detector doesn’t return a hypotheses for both
images, the variable is set to no hyp.
towel position. The position of the towel is deter-
mined similarly to the position of the mug. The
static image regions used for towel detection are
the face and else region as described in the pre-
vious section. Additionally, two areas left and
right of the counter region are treated as a com-
mon region hook where the towel is usually hang
up. Similar to mug position, we set towel position
to no hyp if the detector does not produce a valid
hypothesis for one of the images.
paste movement. If the paste is in the counter re-
gion, the number of edge pixels are increased
compared to the case when the paste is outside the
counter region due to a manipulation by the user.
Hence, the number of edge pixels in the counter
region indicates whether the paste is used or not.
Paste movement is detected by simply threshold-
ing this number: If the number of edge pixels is
below the threshold t
1
, the variable is set to yes,
otherwise no.
brush movement. The movement of the brush is
classified into the values no, yes face and yes sink
using a two-step classifier: Firstly, we classify
whether the brush is moving at all: We com-
pare the orientation of the brush given by the 3-
dimensional gyroscope data at time t with the
mean orientation over the last 3 time steps. If
the difference is above a threshold t
2
, we esti-
mate that the brush is moving. In order to dis-
tinguish between the user behaviors brush teeth
and paste on brush (the brush is moving in both
behaviors), we use a Support Vector Machine
(SVM) for a more fine-grained classification into
the two classes yes sink and yes face: The input
features are the 9-dimensional features from the
brush module: acceleration, orientation and the
earth’s magnetic field in x, y and z direction each.
The SVM with an RBF kernel is trained with a
leave-one-out cross-validation scheme on manu-
ally labeled sample data. The γ and C parameters
of the RBF kernel are calculated using an exten-
sive grid search in the parameter space.
tap condition. The discretization of the
tap condition is trivial: If the flow sensor
returns 0, tap condition is set to off, otherwise to
on.
We classify user behaviors based on the discretized
observation variables using a Bayesian Network and
a Bayesian Filtering approach as described in the fol-
lowing section.
5.2 Bayesian Network Classification
In our framework, we aim to recognize the user be-
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
166
haviors obtained from the IU analysis in table 1. We
subsume the user behaviors fill mug and clean mug to
a common user behavior rinse mug because the rel-
evant observation variables as well as the according
states are nearly identical for both user behaviors. In
a regular trial, user behaviors don’t follow exactly on
each other, but mostly alternate with transition behav-
iors, for example the user’s hand approaches or leaves
a manipulated object. We consider these transition
behaviors by adding a user behavior nothing which
we treat as any other user behavior in our recogni-
tion model. In this work, we use a Bayesian Network
(BN) to classify user behaviors based on the observa-
tions O
1
...O
5
. A BN models a joint probability dis-
tribution of random variables. Conditional indepen-
dence relations between variables are modelled using
a directed acyclic graph. A BN is ideally suited to
model the structural relations between user behaviors
denoted by the random variable S and relevant obser-
vation variables O
1
...O
5
. On a higher level, the inclu-
sion of an observation variable O
i
in the BN of be-
havior s describes that O
i
is relevant for classifying
behavior s. The relevance relations arise from the re-
sults of IU analysis: For example for paste
on brush,
relevant observation variables according to table 1 are
paste movement and brush movement. All other ob-
servation variables are not relevant according to IU
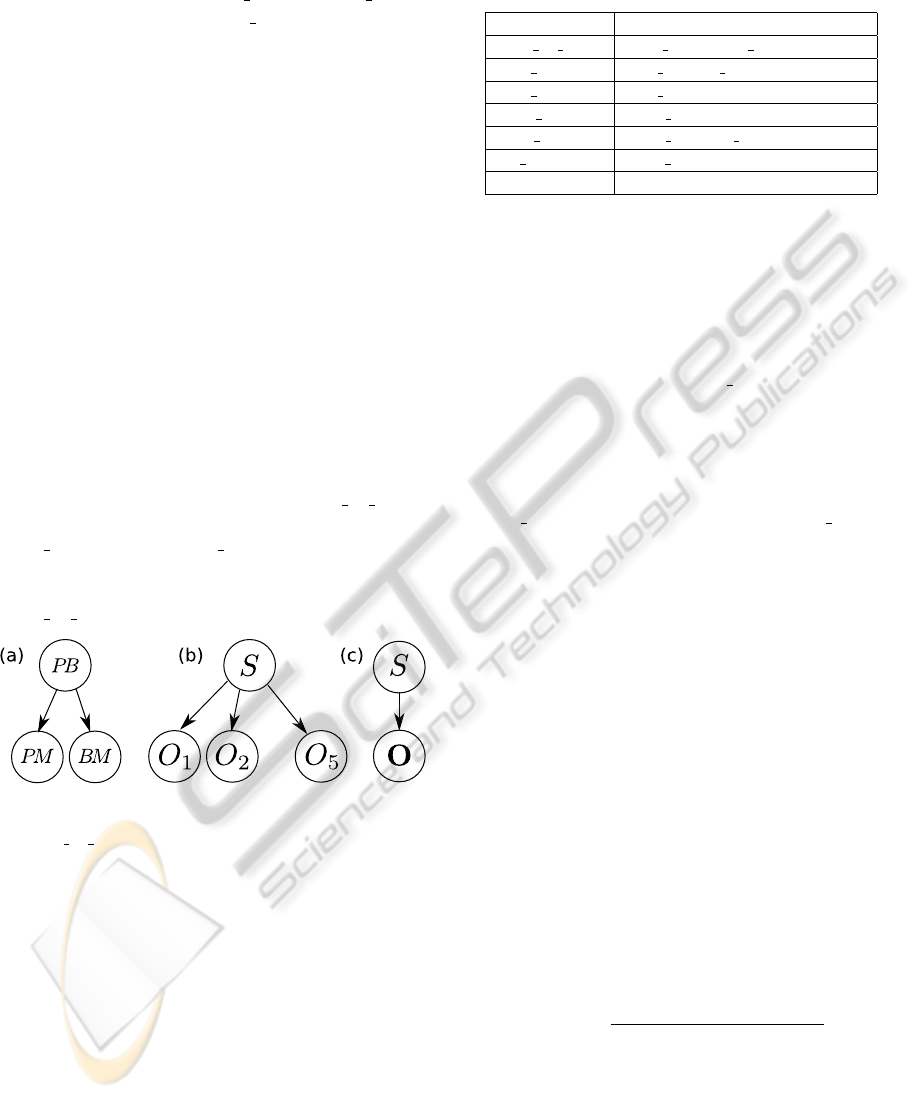
analysis and are not regarded in the BN. The BN for
paste on brush is shown in figure 3 (a). For each user
...
Figure 3: Bayesian Networks with three different struc-
ture: (a) IU-based structure: Example BN for user behav-
ior paste on brush: BM and PM are brush and paste move-
ment, respectively. (b) NaiveBayes (c) Holistic.
behavior, we maintain a BN with a structure accord-
ing to table 3 where we list relevant observation vari-
ables for each user behavior. IU analysis does not pro-
vide a structural relationship for behavior nothing be-
cause IU analysis doesn’t model transition behaviors
explicitly as user behaviors. Since the transition be-
haviors can occur between all behaviors, we declare
all observation variables relevant for classifying noth-
ing. We denote the approach using relevance relations
in the BN structure as IU-based. We compare the IU-
based approach with a NaiveBayes approach where
all observation variables are relevant for each user be-
havior and each observation variable O
i
is condition-
ally independent given the user behavior:
Table 3: User behaviors and relevant observation variables
according to IU analysis.
User Behavior Relevant Observation Variables
paste on brush paste mov, brush mov
rinse mug mug pos, tap cond
rinse mouth mug pos
brush teeth brush mov
clean brush brush mov, tap cond
use towel towel pos
nothing all obs. variables
P(O
1
, ..., O
5
, S) =
5
∏
i=1
P(O
i
|S) (1)
The BN with NaiveBayes structure shown in Figure 3
(b) has the ability to deal with small training sets since
the probability of each O
i
depends only on the user
behavior S. This is important in our work, because
some user behaviors like clean brush are rare com-
pared to other behaviors and the acquisition of data in
our scenario is very hard. A disadvantage of Naive-
Bayes is the influence of irrelevant variables in the
classification of behaviors. The position of the mug
for example should be irrelevant for the classification
of use towel. Hence, the probability of mug position
might be very low and decreases the overall probabil-
ity in the product in equation 1. We try to overcome
this side effect by using a BN with a Holistic struc-
ture: We subsume the observations O
1
...O
5
in a vec-
tor O and treat O as a single observation as shown in
figure 3 (c). The BN with Holistic structure is prone to
faulty observations which happen occasionally in the
discretization of features into observation variables.
In the Holistic BN, faulty observations lead to rapid
changes in the belief b from one time step to the next.
This is not desirable in our scenario, because transi-
tions between user behaviors are rather smooth due to
the nature of the task. Hence, we extend our frame-
work with a transition model which takes into account
the belief of the preceding time step. This results in
a Bayesian Filtering approach similar to the forward
algorithm in a Hidden Markov Model as the simplest
type of a Dynamic Bayesian Network. The belief b
is updated to a consecutive belief b
0
for each user be-
havior s
0
as shown in equation 2:
b
0
(s
0
) =
O(s
0
, o) ·
∑
s∈S
T (s
0
, s) · b(s)
C
(2)
with the normalization term C =
∑
s
0
∈S
O(s
0
, o) ·
∑
s∈S
T (s
0
, s) · b(s). O(s
0
, o) is the probability of mak-
ing observation o when the user behavior is s
0
. For
the IU-based approach, O(s
0
, o) =
∏
i
s
0
P(O
i
s
0
|s
0
) with
i
s
0
are the variables i which are relevant for user be-
havior s
0
according to IU analysis. For NaiveBayes
and Holistic, O(s
0
, o) =
∏
5
i=1
P(O
i
|s
0
) and O(s
0
, o) =
USER BEHAVIOR RECOGNITION FOR AN AUTOMATIC PROMPTING SYSTEM - A Structured Approach based on
Task Analysis
167
P(O|s
0
), respectively. T (s
0
, s) = P(s
0
|s) is the proba-
bility of a state transition from user behavior s to user
behavior s
0
. The observation model O(s
0
, o) is learned
on manually annotated training data using Maximum
Likelihood (ML) estimation.
P
ML
(O
i
= o
j
|S = s
k
) =
n
i j
N
ik
(3)
where n
i j
is the number of observations of variable i
with value j and N
ik
is the number of observations of
variable i when user behavior is k. We apply a leave-
one-trial-out cross validation scheme to estimate the
parameters: The test set consists of data of a sin-
gle trial and the residual data forms the training set.
Learning the transition model T from data is similar
to learning the observation model:
P
ML
(S = s
0
|S = s) =
n
ss
0
N
s
0
(4)
where n
ss
0
is the number of transitions from user be-
havior s to s
0
and N
s
0
is the total number of transitions
to s
0
. The ML estimation results in a very peaked
state transition distribution: The probability of self
transitions is very high. Transitions from one state
to another have a very low probability because the
number of occurrences of different user behaviors is
small compared to the length. Hence, the transition
model in equation 2 leads to smooth state transitions
between user behaviors because single faulty observa-
tions can’t rapidly change the entire belief from one
time step to the next. This is a desirable behavior in
our system.
The advantage of the proposed hierarchical frame-
work is two-fold: Firstly, we can combine trivial and
sophisticated classifiers in the discretization of fea-
tures into observation variables since each observa-
tion variable can be treated independently. Secondly,
classifiers can easily be exchanged or added to our
framework for different tasks analyzed with IU anal-
ysis.
We compare our hierarchical framework using ob-
servation variables as an intermediate representation
with a completely feature-driven classification ap-
proach using a multi-class Support Vector Machine
as described in the following section.
5.3 Multi-Class SVM
We use a multi-class Support Vector Machine (MC-
SVM) for classifying user behaviors. The MC-SVM
method classifies the 19-dimensional feature vector
f
1
... f
19
into the six user behaviors given in table 1
and behavior nothing. The features are normalized to
the interval [−1, 1]. The SVM with an RBF kernel
is trained with a leave-one-trial-out cross-validation
scheme on manually labeled sample data. The pa-
rameters γ and C of the RBF kernel are calculated us-
ing an extensive grid search in the parameter space.
The classical MC-SVM predicts the output label for
a given test sample. In our recognition framework,
we use a Bayesian Filtering approach based on the
probability distribution over user behaviors. In or-
der to compare MC-SVM to our approach, we ap-
ply an adapted form of MC-SVM proposed in (Wu
et al., 2004) which provides probability estimates
over classes instead of a single class label.
6 RESULTS
We show results for the approaches described in the
previous section on a dataset of 18 trials. Each trial
shows a single brushing task. In this work, the tri-
als are performed by regular users. Since we abstract
from the recognition of specific movements by track-
ing objects or the user’s hands, data of regular users
can be used for evaluating our framework in a first
development cycle because regular users show sim-
ilar characteristics in terms of a flexible and highly
user-dependent execution of the task. However, we
aim to conduct experiments with persons with cog-
nitive disabilities in the future. The 18 trials were
performed by 9 users where 2 users conducted 4 tri-
als each, 3 users conducted 2 trials each and 4 users
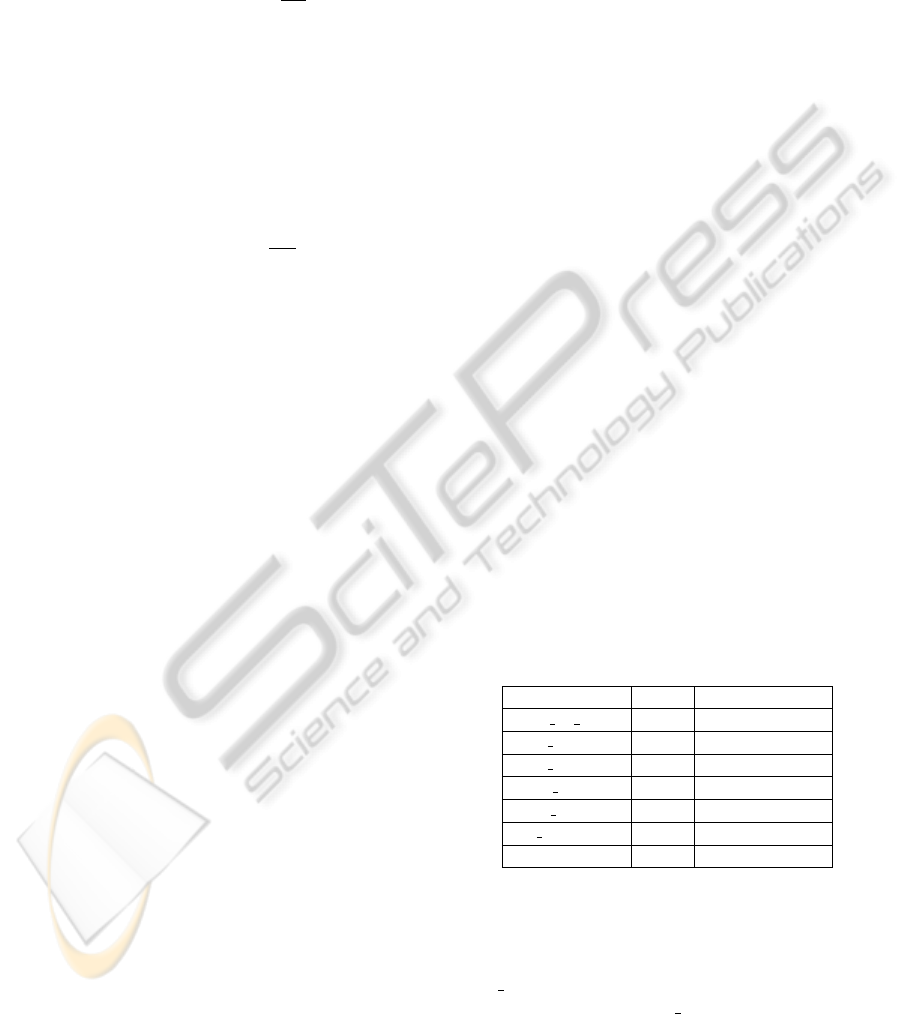
conducted a single trial each. Table 4 shows the total
number of occurrences for each user behavior in the
trial data. Since nothing usually alternates with any
Table 4: Table shows for each user behavior the total num-
ber of occurrences ”nrUB”, total number of frames and the
average length ”nrFrames (avg)” in the trial data.
User Behavior nrUB nrFrames (avg)
paste on brush 16 1922 (120)
rinse mug 20 1818 (91)
rinse mouth 29 1681 (58)
brush teeth 18 35641 (1980)
clean brush 24 3428 (143)
use towel 13 1922 (148)
nothing 137 22426 (164)
other user behavior in a regular trial it occurs much
more frequently than any other behavior. Besides the
total number of occurrences, the average lengths of
user behaviors vary extremely as shown in table 4:
rinse mouth for example has an average length of 58
frames compared to brush teeth with an average of
1980 frames. Furthermore, this results in a huge dif-
ference in the number of training data for each user
behavior. The huge variance in average lengths as
well as small amount of training data for certain be-
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
168
haviors make the recognition problem very challeng-
ing. Table 5 shows the classification rates for individ-
ual user behaviors and average rates. IU, NB and HO
denote the three approaches using a Bayesian Net-
work with different structures: For IU, the structure
is given by the relevant observation variables for each
user behavior obtained from the IU analysis, NB is the
NaiveBayes and HO denotes the holistic structure as
described in section 5.2. SVM denotes the approach
using a multi-class Support Vector Machine (section
5.3). We compare the approaches with two different
variants of our recognition framework: OT describes
the Bayesian Filtering variant where the belief b is
updated according to equation 2 using the observa-
tion and the transition model as mentioned in section
5.2. O describes the variant using the Bayesian Net-
work without a transition model between behaviors.
The average classification rates for NB, HO and SVM
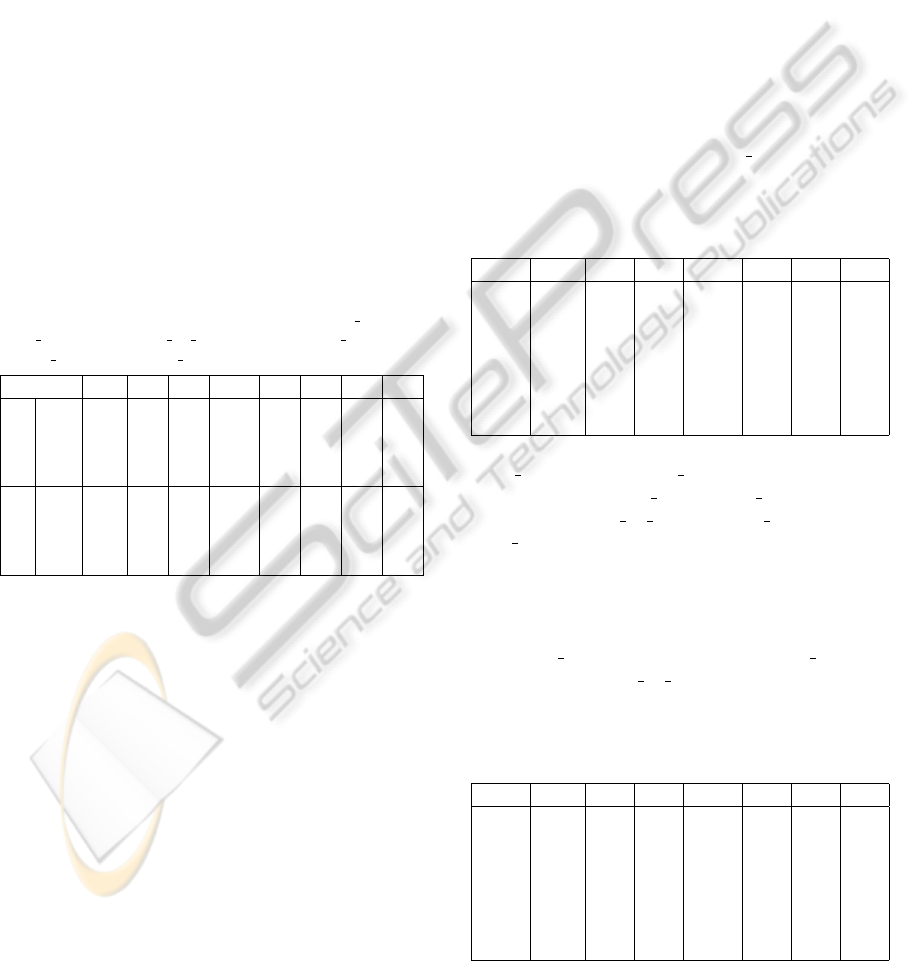
Table 5: Comparison of classification rates for the differ-
ent approaches: OT - Bayesian Filtering, O - Bayesian Net-
work classifier without transition model. IU - BN structure
obtained in IU analysis, NB - NaiveBayes, HO - Holis-
tic denote the different BN structure approaches, SVM -
multi-class Support Vector Machine, RMg - rinse mug, UT
- use towel, PB - paste on brush, RMth - rinse mouth, BT
- brush teeth, CB - clean brush, N - nothing.
approach RMg UT PB RMth BT CB N Avg
IU 73.1 88.1 75.2 81.4 79 48.1 25.9 67.3
O NB 91.6 89.5 90.4 91 71.3 87.6 47.4 81.3
HO 74.2 89.1 77.9 75.7 72 84.1 49.5 74.7
SVM 72.4 71 66.2 75.1 53 77.1 54.4 67
IU 70.4 91.3 72.1 80.3 89.9 38 28.6 67.2
OT NB 94.1 95.1 85.4 95.7 81.7 88.8 50.4 84.5
HO 79 94.4 75.3 79.3 81.9 85.5 55 78.6
SVM 64.5 68.1 64 55.1 82.9 61.1 74 68.2
are slightly increased in OT compared to O except for
IU where rates are similar. Obviously, the transition
model can deal with faulty observations by suppress-
ing rapid belief changes from one time step to the next
which increases the classification rates. Instead, the
transition model favors smooth belief changes which
is desirable for our system due to the nature of the
underlying task. In the following, we concentrate on
the analysis of OT to compare the approaches in more
detail.
The NB method leads to the highest classification
rates with an average of 84.5%. With 68.2%, the ac-
curacy of the SVM method is similar to the IU method
with 67.2%, but worse than NB with 84.5%. The ex-
cellent result for the NB method shows that our sys-
tematic approach for user behavior recognition based
on IU analysis is feasible: In the NB method as well
as the HO and IU method, the results of the IU anal-
ysis are integrated in terms of environmental config-
urations on which the classification of user behaviors
is based.
For IU, NB, HO and SVM, the classification rates
for nothing are highly decreased in comparison to
other user behaviors, especially in IU where the struc-
ture of the Bayesian Network classifier is obtained
in terms of relevant observation variables. For noth-
ing, all observation variables are relevant which de-
creases the classification rate for nothing compared
to other user behaviors where IU analysis provides
a specific set of relevant variables for each user be-
havior. The classification rates for single user behav-
iors are also decreased in IU compared to NB and
HO. Furthermore, user behaviors that have an equal
or similar set of relevant observation variables are
mixed up in the IU method as shown in the con-
fusion matrix in table 6. clean brush (for which
Table 6: Confusion matrix for BN classifier with IU struc-
ture in the Bayesian Filtering approach. See table 5 for ab-
breviations.
RMg UT PB RMth BT CB N
RMg 70.4 1.4 6.3 3.5 2.4 16.1 0
UT 0 91.3 5.9 0 1.1 0 1.6
PB 0 1.4 72.1 0 21.6 0 4.8
RMth 0 0 6.4 80.3 13.3 0 0
BT 0 0 10.1 0 89.9 0 0
CB 0 3.6 24.1 0 34.2 38.1 0
N 1.7 7.1 24.9 12.7 23.5 1.6 28.6
brush movement and tap condition are relevant) is
misclassified as brush teeth (brush movement) with
34.2% and paste on brush (brush movement and
paste movement) with 24.1%. Obviously, the residual
variables not in the set of relevant variables seem to be
important for distinguishing user behaviors where the
same set of objects are manipulated. The confusion
matrix of NB given in table 7 underlines the assump-
tion: clean brush is misclassified as brush teeth with
only 1.3% and paste on brush with 3.5%. Both NB
Table 7: Confusion matrix for BN classifier with NB struc-
ture in the Bayesian Filtering approach. See table 5 for ab-
breviations.
RMg UT PB RMth BT CB N
RMg 94.1 0 0.1 1.2 0 2 2.5
UT 0.1 95.2 1 0 0.1 0 3.7
PB 0 0.6 85.4 0.1 6.8 0 7.1
RMth 1.1 0 0.2 95.7 1.2 0 1.8
BT 0.2 0 12.2 0.5 81.7 0 5.4
CB 0.1 0 3.5 6.3 1.3 88.8 0.1
N 1.9 5 14.6 8.9 15.7 3.8 50.4
and HO make use of the full information available by
incorporating all observation variables for each user
USER BEHAVIOR RECOGNITION FOR AN AUTOMATIC PROMPTING SYSTEM - A Structured Approach based on
Task Analysis
169

behavior. However, NB has a higher average rate with
84.5% compared to HO with 78.6% as shown in ta-
ble 5. Apparently, NB is more suited to deal with
small amounts of training data for certain user behav-
iors in our scenario: Due to the conditional indepen-
dence assumption in the NB approach, the probabil-
ities for each observation variable given the user be-
havior can be calculated independently of the other
observation variables. This leads to a more accurate
prediction of the underlying probabilities and a higher
classification rate compared to the HO method where
the observation variables are subsumed in a single ob-
servation. As shown in table 5, the NB produces ex-
cellent classification results for single user behaviors
showing a huge difference in length according to ta-
ble 4. The classification rates range from 81.7% for
brush teeth to 95.7% for rinse mouth. Only nothing
has a decreased rate of 50.4%.
Our results show that our hierarchical classifica-
tion framework based on the results of IU analysis is
well suited to approach the recognition problem in our
scenario. Our framework can deal well with the spe-
cific requirements of small amounts of training data
for certain behaviors and arbitrary behavior lengths.
7 CONCLUSIONS
In this paper, we focus on the challenging problem
of user behavior recognition in a real-world scenario.
We use a structured approach to develop a recognition
framework for an automatic prompting system assist-
ing persons with cognitive disabilities in the everyday
task of brushing teeth. We analyze the task using IU
analysis. We identify user behaviors which are im-
portant to complete the task successfully as well as
environmental configurations of objects involved in
the task. User behaviors are classified based on envi-
ronmental configurations using a Bayesian Network
(BN) in a Bayesian Filtering approach.
We present recognition results on 18 trials per-
formed by regular users. In future work, we aim to
test our recognition framework in a study with per-
sons with cognitive disabilities. An average recog-
nition rate of 84.5% using a BN with a NaiveBayes
structure shows that our framework is suitable to user
behavior recognition for an automatic prompting sys-
tem in a complex real-world scenario: The Bayesian
Filtering approach can deal with the specific require-
ments like small amount of training data for user be-
haviors and arbitrary behavior lengths. Furthermore,
the framework is applicable to other tasks and easily
extendable with different classifiers due to the hierar-
chical structure.
ACKNOWLEDGEMENTS
The authors would like to thank the inhabitants and
caregivers of Haus Bersaba for their high motiva-
tion to cooperate in the project ’Task Assistance for
Persons with Cognitive Disabilities’ (TAPeD) of the
Cognitive Interaction Technology Center of Excel-
lence (CITEC), Bielefeld University.
REFERENCES
Galata, A., Johnson, N., and Hogg, D. (2001). Learning
variable-length Markov models of behavior. Com-
puter Vision and Image Understanding, 81(3):398–
413.
Hoey, J., Ploetz, T., Jackson, D., Monk, A., Pham, C., and
Olivier, P. (2011). Rapid specification and automated
generation of prompting systems to assist people with
dementia. Pervasive and Mobile Computing, 7(3):299
– 318.
Hoey, J., Poupart, P., Bertoldi, A. v., Craig, T., Boutilier, C.,
and Mihailidis, A. (2010). Automated handwashing
assistance for persons with dementia using video and
a partially observable markov decision process. Com-
puter Vision and Image Understanding, 114:503–519.
Moore, D., Essa, I., and Hayes, M. (1999). Object Spaces:
Context Management for Human Activity Recogni-
tion. In AVBPA’99, 2nd Int. Conf. on Audio-Visual
Biometric Person Authentication, Washington, DC.
Nguyen, N., Phung, D., Venkatesh, S., and Bui, H. (2005).
Learning and detecting activities from movement tra-
jectories using the hierarchical hidden markov model.
In CVPR’05, Int. Conf. on Computer Vision and Pat-
tern Recognition, volume 2.
Oliver, N., Horvitz, E., and Garg, A. (2002). Layered repre-
sentations for human activity recognition. In ICMI’02,
Int. Conf. on Multimodal Interfaces, Pittsburgh, PA.
Patterson, D. J., Fox, D., Kautz, H., and Philipose, M.
(2005). Fine-grained activity recognition by aggregat-
ing abstract object usage. In ISWC’05, IEEE Int. Sym-
posium on Wearable Computers, Washington, DC,
USA.
Pusiol, G., Patino, L., Bremond, F., Thonnat, M., and
Suresh, S. (2008). Optimizing Trajectories Cluster-
ing for Activity Recognition. In MLVMA’08, 1st Int.
Workshop on Machine Learning for Vision-based Mo-
tion Analysis, Marseille, France.
Robertson, N. and Reid, I. (2006). A general method for
human activity recognition in video. Computer Vision
and Image Understanding, 104:232–248.
Ryu, H. and Monk, A. (2009). Interaction Unit Analy-
sis: A New Interaction Design Framework. Human-
Computer Interaction, 24(4).
Subramanya, A., Raj, A., Bilmes, J. A., and Fox, D. (2006).
Recognizing activities and spatial context using wear-
able sensors. In UAI ’06, 22nd Conference on Uncer-
tainty in Artificial Intelligence, Cambridge,MA, USA.
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
170

Wu, J., Osuntogun, A., Choudhury, T., Philipose, M., and
Rehg, J. (2007). A scalable approach to activity recog-
nition based on object use. In ICCV’07. IEEE 11th
International Conference on Computer Vision.
Wu, T.-F., Lin, C.-J., and Weng, R. C. (2004). Probabil-
ity estimates for multi-class classification by pairwise
coupling. Machine Learning Research, 5:975–1005.
Yang, A. Y., Jafari, R., Sastry, S. S., and Bajcsy, R. (2009).
Distributed recognition of human actions using wear-
able motion sensor networks. Ambient Intelligence
and Smart Environments, 1:103–115.
USER BEHAVIOR RECOGNITION FOR AN AUTOMATIC PROMPTING SYSTEM - A Structured Approach based on
Task Analysis
171
