
ENERGY/LATENCY TRADE-OFFS IN GEOGRAPHIC ROUTING
FOR ULTRAWIDEBAND WIRELESS SENSOR NETWORKS
Samuela Persia
1,3
and Dajana Cassioli
2,3
1
Fondazione Ugo Bordoni, Via del Policlinico 147, 00161, Rome, Italy
2
Computer Science Department, University of L’Aquila, Via Vetoio 1, 67010, Coppito, AQ, Italy
3
RADIOLABS Associated Laboratory, University of L’Aquila, Via G. Gronchi 18 Zona Ind.le di Pile, 67100, L’Aquila, Italy
Keywords:
Energy-aware Wireless Sensor Networks, Geographic Routing, Latency, Location Tracking UWB Networks.
Abstract:
Wireless Sensor Networks (WSNs) may exploit accurate localization capabilities of ultrawideband (UWB)
transceivers to improve performance of high layer protocols. We analyze power consumption of a WSN
accommodating both communication and positioning into the same UWB transceiver and implementing a ge-
ographic routing algorithm, either the Greedy Perimeter Stateless Routing (GPSR) or its energy aware version,
the e-GPSR. Power consumption depends on beacon rate for positions’ updates, the number of hops to reach
the destination and the number of neighbors per node. On the other hand, the beacon rate impacts the reliabil-
ity of the neighbor lists; the number of hops impacts on the end-to-end latency; the number of neighbors, i.e.
the network connectivity, impacts on routing performance. The presented analysis assesses, by means of both
theoretical investigations and simulation results, the main trade-offs between power consumption and latency
that can be applied to obtain the best achievable performance.
1 INTRODUCTION
WSNs have attracted great interest in both research
and commercial communities for their wide applica-
tion range and versatility. Typical applications require
nodes with average power consumption substantially
lower than for other wireless networks. In recent
years the research focused on how to overcome the
power issue by introducing energy-aware functional-
ities in WSNs design, even though a common criteria
for all applications cannot be established.
UWB technology enables low power transmis-
sions, thanks to the efficient use of spectrum and low
duty-cycle signals, and the easy integration of local-
ization functionality. The use of power-awareness and
location aided algorithms at network (NWK) layer ap-
pears as the best choice. Performance of such algo-
rithms is strictly related to the knowledge of neigh-
bors information (Stojmenovic, 2002).
In this paper we consider the Greedy Perimeter
Stateless Routing (GPSR) algorithm (Karp and Kung,
2000) and the energy-aware version, namely the e-
GPSR, we recently proposed in (Persia and Cassioli,
2007). Our analysis shows the trade-offs that should
be applied when designing this type of networks, be-
cause the main factors impacting energy consump-
tion also impact latency and routing performance. We
show that the e-GPSR guarantees low power con-
sumption and latency, thanks to its intrinsic forward-
ing criteria.
2 PROBLEM STATEMENT
Basic requirements of WSNs are low power consump-
tion (uniformly distributed among network nodes)
and low latency (especially for mission-critical appli-
cations). For low data rate location/tracking (LDR-
L/T) UWB WSNs exploiting geographic routing, a
further requirement is given by low beacon traffic,
aiming to the best balance between positioning and
communication tasks and to the optimal beacon up-
date rate to maintain good performance of geographic
forwarding. The power consumption of each node
depends on its own activities, while the latency de-
pends on node’s connectivity and the reliability of
geographic routing depends on the beacon rate and
nodes’ mobility. In the following, we formulate the
problem statement through theoretical investigations,
showing the interrelations between power consump-
tion, latency and neighbor lists updating.
115
Persia S. and Cassioli D..
ENERGY/LATENCY TRADE-OFFS IN GEOGRAPHIC ROUTING FOR ULTRAWIDEBAND WIRELESS SENSOR NETWORKS.
DOI: 10.5220/0003834601150118
In Proceedings of the 1st International Conference on Sensor Networks (SENSORNETS-2012), pages 115-118
ISBN: 978-989-8565-01-3
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

The total energy consumed by a WSN of N nodes to
transmit M packets can be expressed as (Sozer et al.,
2000; Wang et al., 2006):
E
tot
=
M
∑
j=1
N
∑
i=1
n
i
E
0
i, j
A(r
i
) (1)
where n
i
is the number of hops needed by the i−th
source node to reach the destination, E
0
i, j
is the min-
imum energy necessary for the packet j transmitted
by the i−source to be received by the next hop, r
i
its
coverage range and A(r
i
) ∝ r
α
loss
i
is the path loss at-
tenuation with 3 ≤ α
loss
≤ 4 for harsh environments.
Let’s assume for sake of simplicity that the farthest
node from the destination, i.e. at a distance d, needs
N hops to transmit one packet and that the coverage
range is r
i
= r = d/N for all nodes, thus E
0
i, j
= E
0
.
Its total consumed energy is:
E
hop
= E
0
A(
d
N
) + E
0
A(
d
N
)2. .. + E
0
A(
d
N
)N
= E
0
A(
d
N
)
N(N + 1)
2
(2)
For a number of hops N
0
< N, we have A(
d
N
) <<
A(
d
N
0
) and
E
0
A
d
N
N(N + 1)
2
< E
0
A
d
N
0
N
0
(N
0
+ 1)
2
, (3)
thus paths with a large number of hops consume less
energy than paths involving a small number of hops.
On the other hand, large numbers of involved hops
imply increased latency.
The latency in a network is commonly measured
in terms of number of hops required to relay a packet
from the source (S) to the destination (D) located at
a distance d. With reference to Fig. 1, applying the
Figure 1: Forwarding mechanism.
analysis in (Cheng and Robertazzi, 1989), the ex-
pected value of the vacant distance r
e
i
for single-hop
distance is:
E[r
e
i
] =
1 − e
−µ(d−r
e
i
)
(1 + µ(d − r
e
i−1
))
µ(1 − e
−µ(d−r
ei−1
)
)
(4)
where r
i
and r
e
i
are depicted in Fig. 1, with r
i
+r
e
i
= d
and µ is the density of nodes in the area. The expected
value of the r
i
is E[r
i
] = d − E[r
e
i
] and the average
number of hops l needed to transmit a packet from S
to D is:
E[l] = d
E[r
i
]
r
e (5)
where d·e is the ceiling operator and r is the nodes’
coverage radius. Evaluating (5) for different cover-
age radii in a WSN of N = 40 nodes and d =10 m,
in a sensing area of 25 × 25 m
2
, we obtain that the
average number of hops is around 2 for r =6 m,
whereas it drastically increases for a small coverage
radius. Hence, large nodes’ coverage range is needed
to achieve low latency, with a consequent increase of
power consumption. Accurate analysis of power con-
sumption in LDR-L/T UWB sensor networks, which
usually produce low data traffic, cannot leave out the
energy fraction spent for the positioning beacon trans-
missions, exploited at the NWK layer by location
aided routing. Frequent beacon transmissions pro-
vide up-to-date positioning in mobile scenarios that
guarantees the highest level of delivery success rate of
geographic routing algorithms. The drawback is that
frequent beacon transmissions in a uncoordinated ac-
cess scheme (aloha) increase the collision probability,
with consequent packet loss.
Performance analyses of geographic routing that
assume a perfect knowledge of neighbors positions
available at any time without control traffic are valid
for static scenarios, but are not realistic for mobile
scenarios. Our analysis uses this ideal case as a
benchmark of achievable performance (CASE: Ideal),
whereas two other realistic scenarios are defined to
investigate the two effects of the beacon traffic: an
increase of the overall traffic load, which is managed
flatly by the aloha MAC, and a potential loss of po-
sition updates. The first scenario models the bea-
con traffic load as a traffic source that adds up to the
data traffic, but the perfect knowledge of exact neigh-
bors position at any time is still assumed. The aim
of this test case (CASE: Beacon) is to find the max-
imum beacon repetition rate tolerable by the WSN
such that packet collisions do not cause the collapse
of the WSN. An even more realistic scenario (CASE:
POS+Beacon), where each node periodically broad-
casts beacons and periodically acquires neighbors in-
formation at each beacon interval T , is used to evalu-
ate the impact of loss of position updates.
3 PERFORMANCE ANALYSIS
We consider a UWB sensor network of M nodes lo-
cated in random positions in an area of 25 m × 25 m.
Anchor nodes are static, the others mobile. All nodes
SENSORNETS 2012 - International Conference on Sensor Networks
116
within the communication range r of a node are con-
sidered as its neighbors for the GPSR, whereas a sub-
set is selected for the e-GPSR according to its selec-
tion criteria explained in the following.
The sink node (SN) is assumed to have a commu-
nication range R able to cover the entire area, such
that downlink communications are direct and without
errors. The SN queries to the network the position of
a randomly chosen node. Every node receiving the
query verifies whether it is the right destination: if
not, it discards the packet. Otherwise, it sends back to
the SN the reply packet through a multi-hop path, re-
actively created by means of one of the two versions
of the geographic algorithm under test.
The physical layer is modeled by the cascade of
a SNR Evaluator and a Decider. The SNR Evaluator
computes the signal-to-noise ratio (SNR) associated
to the received packets and the Decider compares its
output with a threshold SNR
th
, discarding the packets
whose SNR is below.
The MAC layer implements a pure aloha scheme.
At the NWK layer we adopt a routing scheme
based on the GPSR (Karp and Kung, 2000). Two
versions of the GPSR are compared, the traditional
and the energy-aware version in (Persia and Cassi-
oli, 2007). The difference between these two ver-
sions stays in the selection criteria of the next hop
in the Greedy mode, whereas there is no difference
in the Perimeter mode, which is the recovery strat-
egy in case of failure of the Greedy approach. During
the Greedy mode the traditional GPSR selects the next
hop according to the MFR (Most Forward within Ra-
dius) approach, i.e. the neighbor geographically clos-
est to the packet destination is selected. The e-GPSR
adds to the MFR two other criteria in the Greedy mode
which take into account both energy and latency con-
straints. For each node j, the possible candidates for
the next hop constitute a subset, N
(j)
Θ
∩
˜
N
(j)
, of the N
(j)
neighbors of the present hop node j, such that the fol-
lowing conditions are verified:
N
(j)
Θ
⊆ N
(j)
| ∀i ∈ N
(j)
Θ
, α
i
≤ Θ
(j)
(6)
˜
N
(j)
⊆ N
(j)
| ∀k ∈
˜
N
(j)
, E
k
≥ E
(j)
T H
(7)
where N
(j)
Θ
and
˜
N
(j)
are the subsets of nodes that ver-
ify (6) and (7), respectively, α
i
is the angle between
the line that joins the node j with the i-th node and the
line that joins the node j with the destination (the SN
for our cases), and E
k
is the residual charge of the k-th
neighbor node. The condition (6) can be seen as a la-
tency constraint, whereas (7) is the power constraint.
Each forwarding node j adaptively sets the angle
Θ
(j)
as Θ
(j)
= α
(j)
+ x
Θ
· (90 − α
(j)
) and the thresh-
old E
(j)
T H
as E
(j)
T H
= (1 − x
C
) · E
(j)
charge
, where α
(j)
is the
Table 1: Simulations’ setup.
RANDOM WAY POINT Speed: 0.5 m/s
MOBILITY MODEL Pause time: 0.1 s
DATA RATE R
b
= 1 Mb/s
TRAFFIC MODEL CBR at 1 packet/s
84 bits per packet
BATTERY CHARGE Initial: E
I
= 10 mAh
minimum angle obtained by considering, among all
neighbors of the node j, the nearest node to the j − D
line, E
(j)
charge
is the maximum residual charge among
the residual charges E
k
of its neighbors, and x
C
∈ [0,1]
and x
Θ
∈ [0,1] are routing design parameters (Persia
and Cassioli, 2007), which modulate the number of
neighbors of each node that varies not only due to the
coverage range.
Performance analysis has been carried out by dy-
namic system simulations in Omnet++. The simula-
tion assumptions and parameters are listed in Table 1.
For each case under study, we average the statistics
over a set of 5 independent stochastic discrete-event
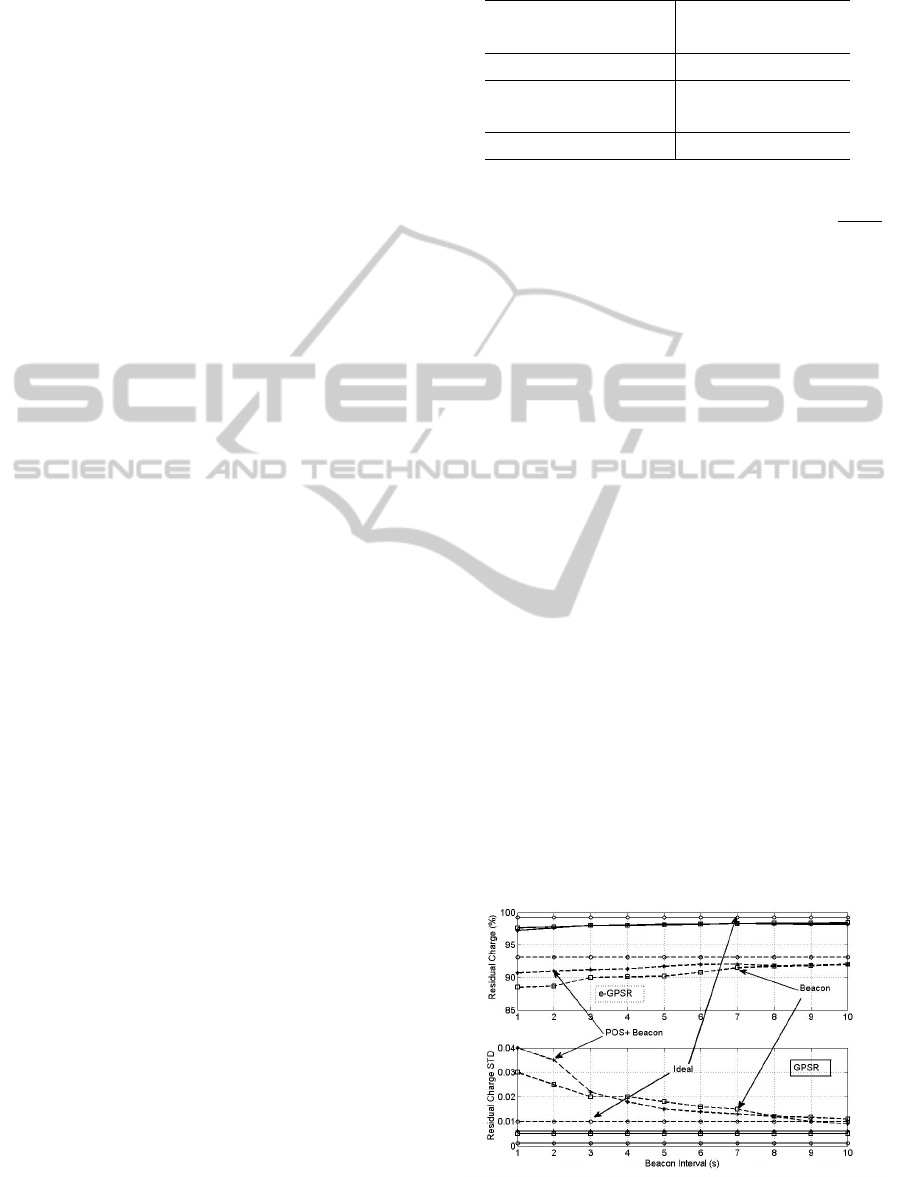
simulations, each having a duration of 100 s. Fig. 2
shows the average and standard deviation (STD) of
residual charge for all nodes. In the presence of bea-
con traffic for the GPSR, the average level of resid-
ual charge increases with increasing beacon inter-
vals, whereas the STD decreases for large beacon in-
tervals, indicating a not uniform discharge through-
out the WSN. For the e-GPSR, the average resid-
ual charge slightly decreases in the presence of bea-
con traffic, and its dependence on the beacon in-
terval is negligible. The STD is constant with re-
spect to the beacon interval and slightly greater than
the ideal case. Hence, nodes discharge quite uni-
formly over the whole network, increasing the net-
work lifetime and the reliability of links and position-
ing. Nevertheless, the above analysis does not take
Figure 2: Average (upper plot) and standard deviation
(lower plot) of the residual charge of network nodes.
ENERGY/LATENCY TRADE-OFFS IN GEOGRAPHIC ROUTING FOR ULTRAWIDEBAND WIRELESS SENSOR
NETWORKS
117
into account the success delivery rate of the consid-
ered routing algorithms. Not all data packets are cor-
rectly received at the destination, because some pack-
ets are discarded somewhere, due to packet collisions,
thus their relaying does not consume the expected en-
ergy level. Since the GPSR sends more control pack-
ets than the e-GPSR, because its neighbor list includes
more nodes, the GPSR’s energy consumption shown
above is sligthly lower than it would be if a larger
number of packets reached the destination. We may
formulate this issue in terms of average energy effi-
ciency of all nodes, defined as:
E
S
=
1
N
N
∑
j=1
(1 − x
R
( j))E
I
M
D
( j)
(8)
where E
I
is the initial energy, x
R
( j) is the residual
fraction of E
I
of the j node at the end of simulation,
M
D
( j) is the number of correctly delivered packets.
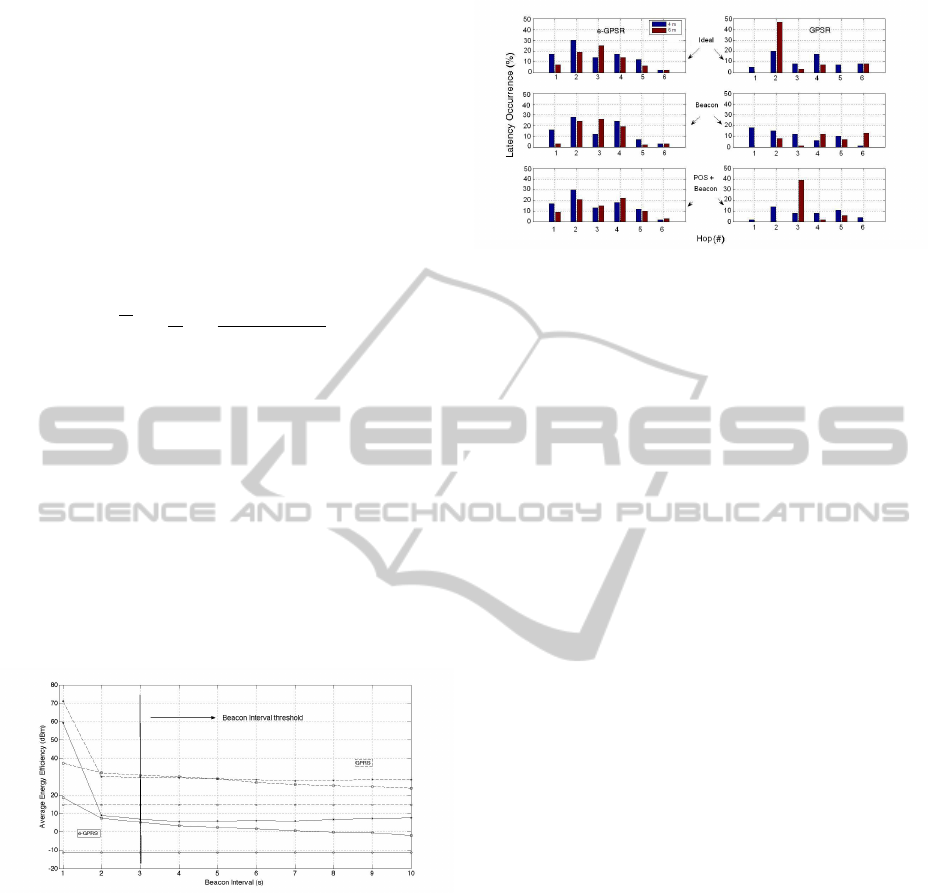
Fig. 3 depicts the average energy efficiency ver-
sus the beacon interval, assuming an initial energy
E
I
= 15 dBm (compliant to UWB regulation) and a S-
D distance d ' 10 m. Although the theoretical model
(2) predicts an energy consumption below 15 dBm
only when 40 hops are used, the GPSR consumes
' 30 dBm and the e-GPSR ' 5 dBm for a beacon
interval of 3 s with a maximum of 6 hops, as shown
in Fig. 4. There, the bar plot of the latency factor,
Figure 3: Average energy efficiency needed to transmit a
packet from the farthest node to the sink node.
i.e. the average number of hops necessary to deliver
data packets from S to D, is depicted. The e-GPSR
exhibits a comparable behavior for the two coverage
radii. Hence, a suitable trade-off between power and
latency can be found. The GPSR shows a non uniform
distribution of latency factor. This attitude becomes
remarkable in the realistic scenario, where packets are
delivered towards the destination only when the actual
route is discovered; otherwise packets are forwarded
among useless hops, due to the non perfect knowledge
of nodes’ positions.
Figure 4: Latency factor for coverage radii of 4m and 6m,
assuming a beacon interval of 3s.
4 CONCLUSIONS
Power consumption and latency of GPSR and e-
GPSR for a UWB WSN have been evaluated and
compared, based on theoretical models at first, then
through dynamic system simulations. In realistic con-
ditions, i.e. in the presence of control and data traf-
fic in the network, the e-GPSR is able to provide a
low power consumption and latency. The simultane-
ous satisfaction of both constraints enable the use of
UWB WSNs for time-driven applications such as in-
dustrial chain monitoring or security/alarm scenarios.
ACKNOWLEDGEMENTS
This work was supported by the ERC Starting Inde-
pendent Researcher Grant VISION (Contr. 240555).
REFERENCES
Cheng, Y. and Robertazzi, T. (1989). Critical connectivity
phenomena in multihop radio models. IEEE Transac-
tions on Communications, 37:770–777.
Karp, B. and Kung, H. (2000). GPSR: Greedy Perimeter
Stateless Routing for Wireless Networks. In Proc. of
the 6th Annual Intern. Conf. on Mobile Comput. and
Network, pages 243–254, Boston, MA, USA.
Persia, S. and Cassioli, D. (2007). Routing Design for
UWB Sensor Network in Industrial and Logistic Sce-
narios. In Proc. of the IST MOBILE SUMMIT, Bu-
dapest, Hungary.
Sozer, E. M., Stojanovic, M., and Proakis, J. G. (2000). Un-
derwater acoustic networks. IEEE Journal of Oceanic
Engineering, 25(1).
Stojmenovic, I. (2002). Position-Based Routing in Ad-Hoc
Networks. IEEE Comm. Mag., 40(7):128–134.
Wang, Q., Hempstead, M., and Yang, W. (2006). A realis-
tic power consumption model for wireless sensor net-
work devices. In Sensor and Ad Hoc Communications
and Networks (SECON).
SENSORNETS 2012 - International Conference on Sensor Networks
118
